
Denne roboten kontrolleret af Bluetooth-smartphone. Smartphone's accelerometer måler telefonens vinkel til venstre / højre, op / ned, bruger disse data til at beregne hastigheden på retningsmotorer, dataene overføres via Bluetooth til Arduino
Hvad du har brug for for at bygge en robot.
Arduino uno, HC-06 Bluetooth-modul, to 300 RPM 12v gearmotorer, H-bridge L298N Dual H Bridge Motor Controller
12 til 1.3 Et blybatteri. Hver motor bruger 0.4A plus forbruget af driverlogik. Arduino-ledninger, almindelige 9v-batterier og et stik til tilslutning af batteriet til Arduino. Elektriske ledninger til tilslutning af elektriske motordrivere. USB-kabel. Telefon med Android version 4 og nyere. 4 drejelige 50 mm gummihjul fra Screwfix eller Toolstation; To Lynxmotion HUB-02 universelle nav.










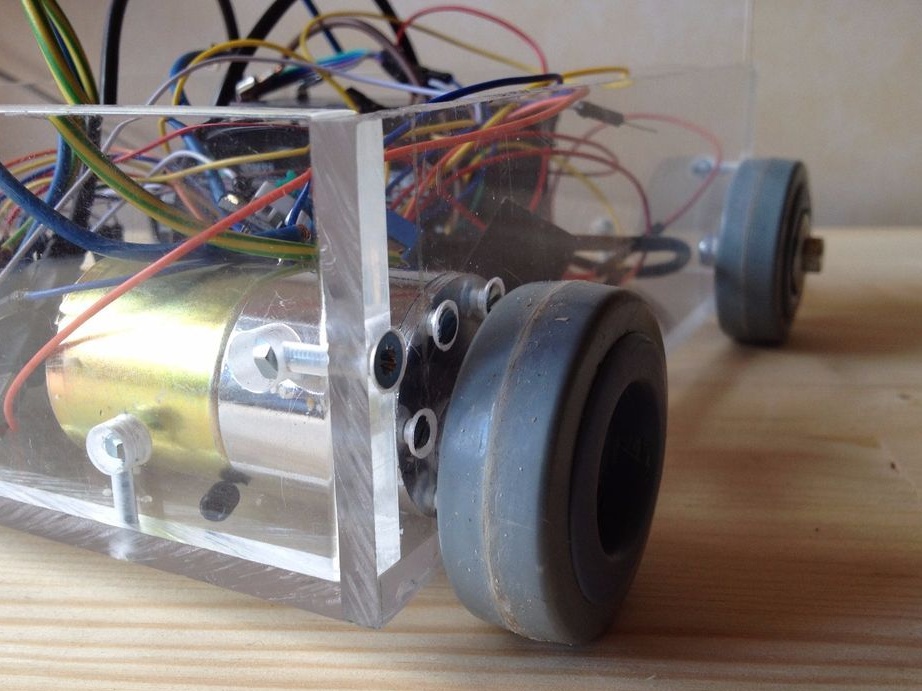
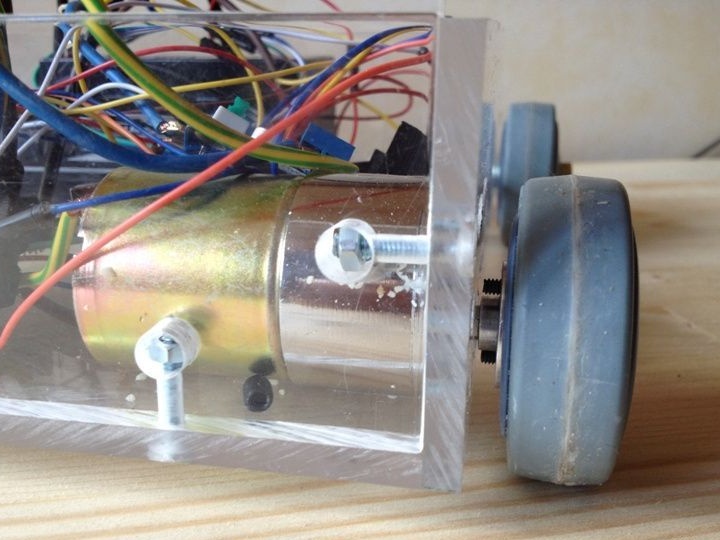
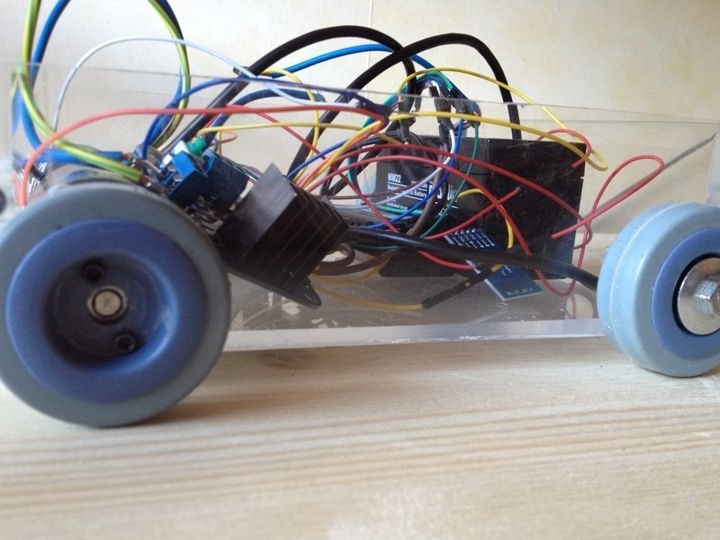
Kassen er samlet af plast 22 cm lang og 17 cm bred. To motorer skal tilsluttes akslen og sikres med en gevindstift.
Forhjul
Gummiet fjernes fra rullerne, og to huller bores i dem i henhold til hullerne på navene. Navene er fastgjort på akserne, der passerer gennem huset med gevindstifter. Derefter fastgøres rullerne på navene, og gummi sættes på dem.
Baghjul
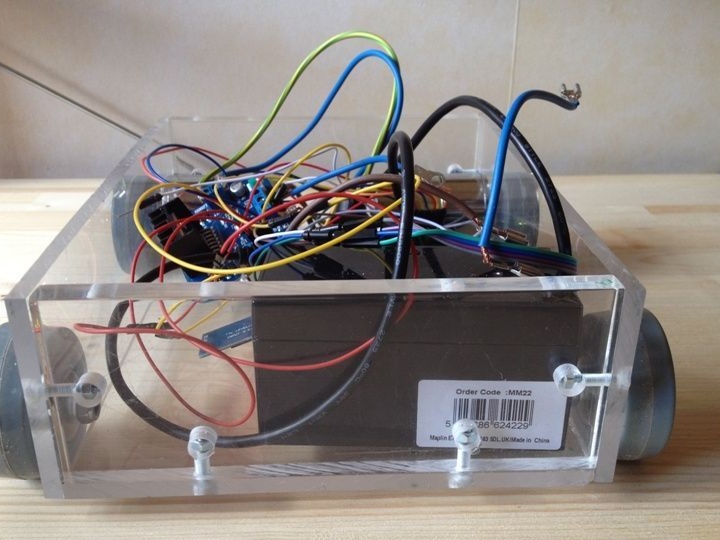
Baghjulene skrues ganske enkelt ud af hængslet og sikres gennem huller, der er boret i huset.
Elektriske forbindelser.
Der vil være problemer med indlæsning af programkoden i Arduino. Dette skyldes, at Bluetooth-modulet, dets RX \ TX-kontakter, er forbundet til Arduino-stifterne 1 og 2, som også bruges til at overføre data via USB. Det er nødvendigt at ændre kontakterne 1 og 2 til 11 og 12 i plug-in-biblioteket, som vil blive brugt til dataoverførsel.
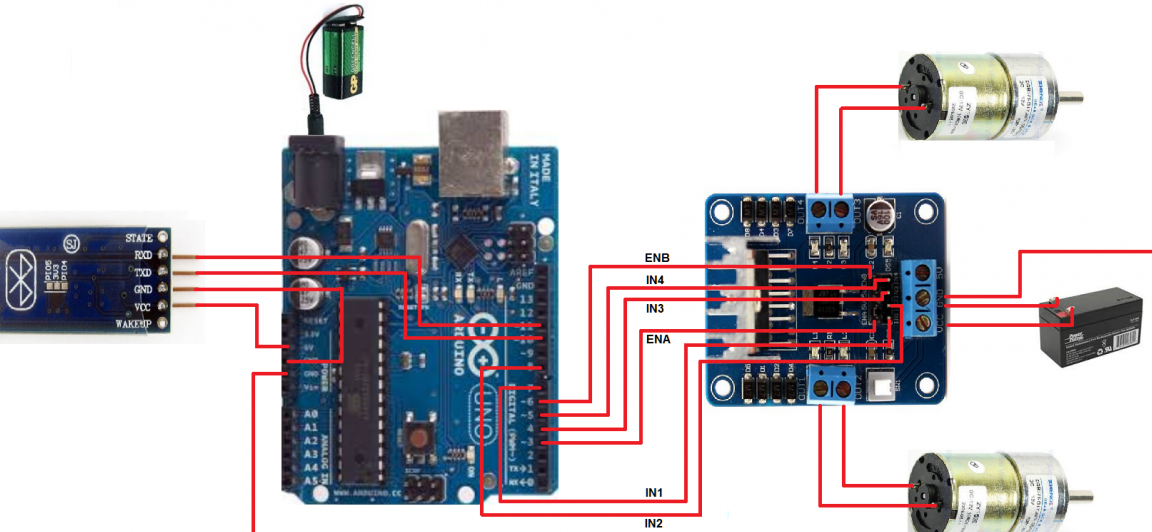
Motordriveren har ikke brug for en separat strømforsyning til logikken. 12V er nok til at drive driverlogikken og selve motoren. Batteriets minus skal forbindes med både Arduino og motordriveren. ECA / 5V- og ENB / 5V-motordriverkontakter kan kobles sammen. Det skal fjernes, før det tilsluttes Arduino. Intet skal tilsluttes de to 5V-stifter.
Android-kode.
Den vedhæftede fil skal pakkes ud og importeres til Android Studio, pakkes den i apk og installeres på telefonen.
Nøglefiler:
Aktivitet i parret udstyr:
deviceList.java
activity_device_list.xml
Aktivitet for LED og bevægelseskontrol:
ledControl.java
activity_led_control.xml
Manifest:
AndroidManifest.xml
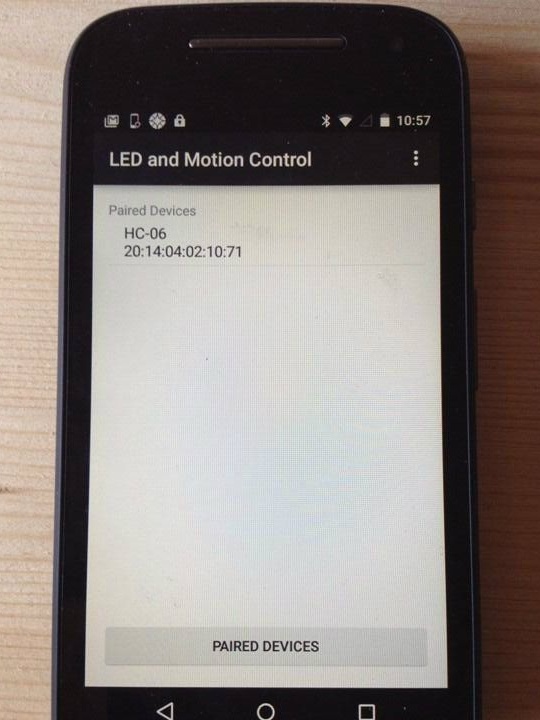
Parret enhedsaktivitet viser tilgængelige Bluetooth-enheder. Så snart enhederne er tilsluttet, overføres kontrol til LED og bevægelseskontrolaktivitet.
Tænd / sluk-knapperne sender en “on” eller “off” meddelelse til Arduino, hvor den indbyggede LED tændes eller slukkes. Telefonens accelerometer styrer bevægelsen, der transmitterer x / y-værdier fra sensoren, hver gang disse værdier ændres. Baseret på dette beregner Arduino hastigheden og rotationsretningen for motorerne i området fra 0 til 255. Det transmitterer disse Arduino-værdier i form af 'L-255:' eller 'R100' osv. Baseret på dette sender Arduino rotationshastighedskommandoer for den venstre motor til ENA, den rigtige til ENB og ændrer rotationsretningen ved at ændre polariteten til IN1, IN2 for den venstre, N3 og N4 for den højre motor.