

Interessant og ikke kompliceret robotender bevæger sig bag et objekt med en bestemt farve.
For at bestemme objektets placering bruges et smartphone-kamera monteret på robotchassiset. Du kan bruge en færdiglavet konstruktør, som jeg allerede har skrevet om her. Her er en liste over, hvad forfatteren havde brug for. Med undtagelse af smartphonen var omkostningerne til denne robot $ 60
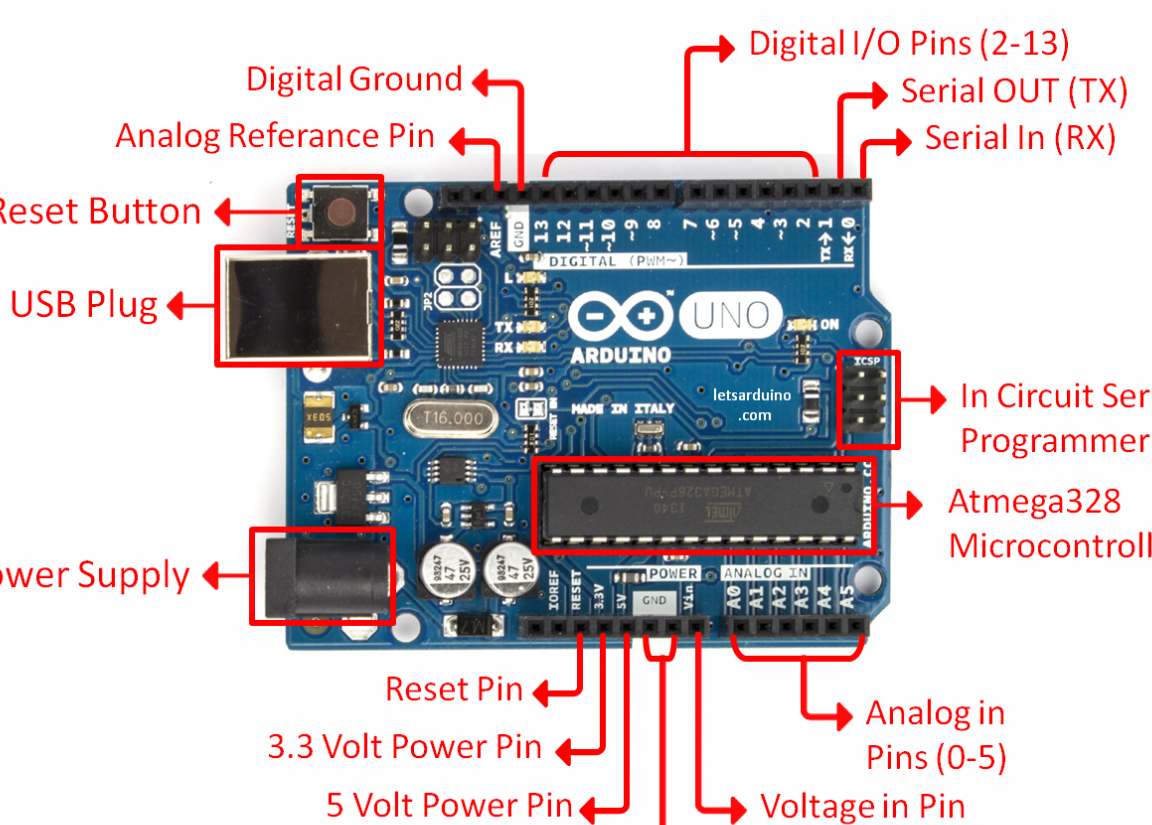
- Arduino UNO
- Smartphone med Android OS
- Robotchassis
- kabler til tilslutning
- H-bro til DC-motorer (forfatter brugt pololu TB6612FNG)
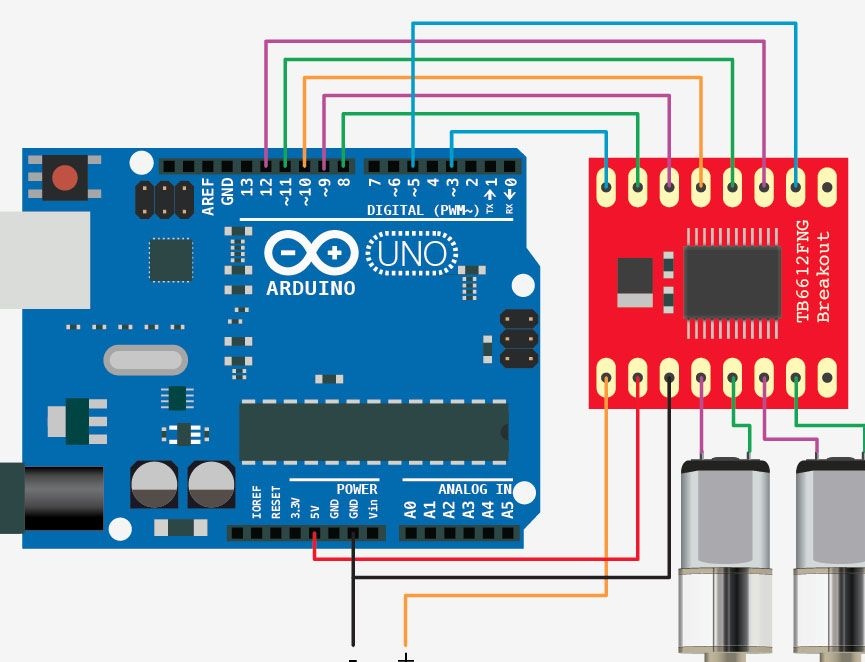
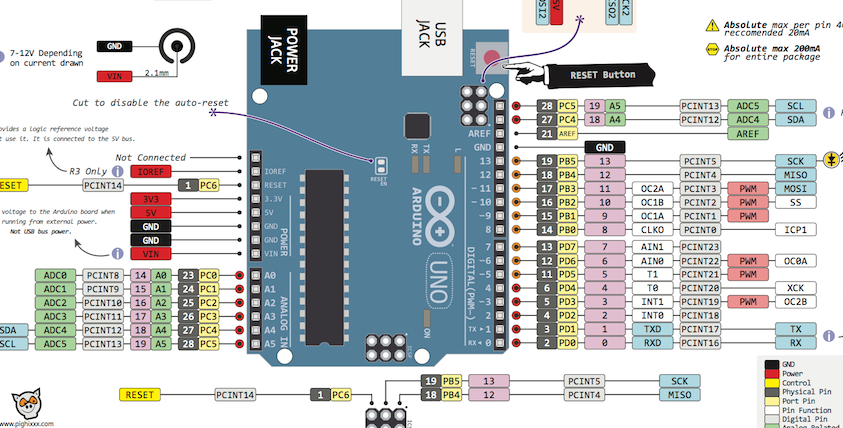
Billedet viser, hvordan TB6612FNG og Arduino Uno forbinder
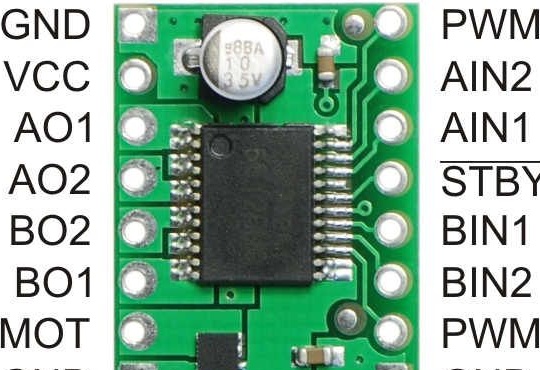
Driverens konklusioner og hvad de er ansvarlige for:
1) GND - Tilslut det til GND-stifterne på Arduino
2) VCC - Forsyningsspænding for driverlogikken. Tilslut det til 5V-stiften på Arduino.
3) A01 - udgangskontakt, der er tilsluttet den positive terminal i motor A.
4) A02 - udgangskontakt, der er tilsluttet den negative pol i motor A
5) B02 - udgangskontakt, der er tilsluttet den negative pol i motor B.
6) B01 - udgangskontakt, der er tilsluttet den positive terminal i motor B
7) VMOT- Udgangsspænding for motorerne. Tilslut det til batteriets positive pol. (At køre motorerne)
8) GND- Tilslut det til batteriets negative terminal.
9) GND- Tilslut det til GND-stiften på Arduino.
10) PWMB-PWM-stiften i motordriveren for at justere motorens hastighed. Tilslut den til en af PWM-stifterne på Arduino og angiv hastigheden for motoren fra 0-255.
11 og 12) og BIN2 BIN1 - Indgangskontakter fra motordriveren til motor B, der bestemmer rotationsretningen for motor B. Forbind den til alle to Arduino digitale stifter.
13) STBY- Tilslut det til enhver digital udgang. Når det installeres på et højt niveau, inkluderer det en driver
14 og 15) AIN1 og AIN2- Indgangsstifter i motordrevet for motoren, som angiver rotationsretningen for motor A. Tilslut den til alle to Arduino digitale stifter.
16) PWMA-PWM-udgang fra motordriveren til justering af motorhastigheden A. Tilslut den til en af PWM-stifterne på Arduino og angiv hastigheden for motoren fra 0-255.
Bluetooth-modul HC-06
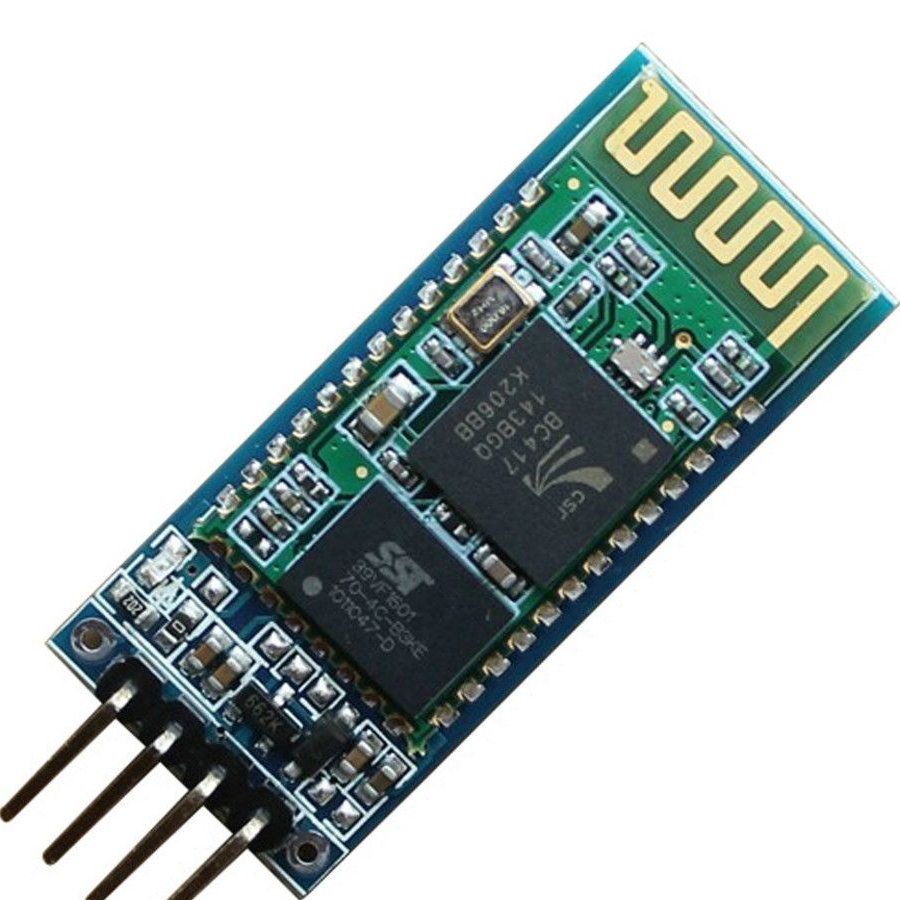
Aliexpress koster omkring $ 6
Hvordan fungerer det hele?
Dette projekt bruger en Android-smartphone med en speciel applikation, der behandler information fra kameraet for at bestemme, hvor det røde objekt er, beregner dets koordinater

bitmap = Bitmap.createBitmap (mRgba.cols (), mRgba.rows (), Bitmap.Config.ARGB_8888); Utils.matToBitmap (mRgba, bitmap);
int x = 0;
int y = 0;
int all_x = 0;
int all_y = 0;
mens (x <176) {
mens (y <144) {
int-pixel = bitmap.getPixel (x, y);
int redValue = Color.red (pixel);
int blueValue = Color.blue (pixel);
int greenValue = Color.green (pixel);
if (redValue> 200 && blueValue <70 && greenValue <70) {
point ++;
all_x = all_x + x;
all_y = all_y + y;
}
y ++;
}
x ++;
y = 0;
}
y = 0;
x = 0;
x_center = alle_x / point;
y_center = all_y / point;I arkivet, forbindelsesdiagrammet og det trykte kredsløbskort til roboten for dem, der ikke ønsker at købe Arduino UNO
Hvad er nødvendigt til montering:
- Alt det, der er nævnt ovenfor, atmega 8, 128 eller 328
- LED, uanset hvilken farve
- 5v lineær stabilisator (til version uden Arduino)
- Stikstik M og F
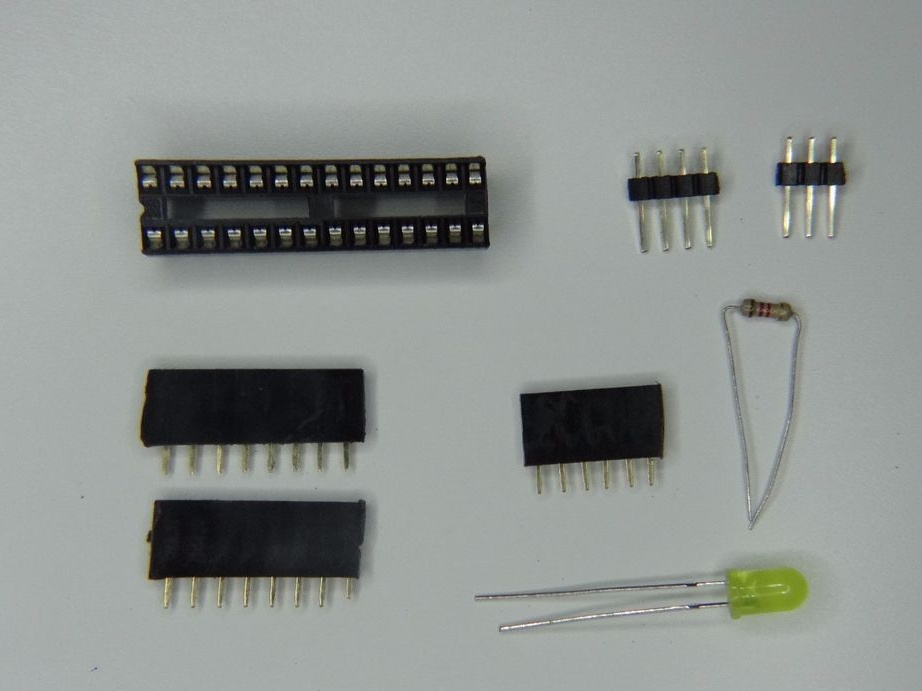
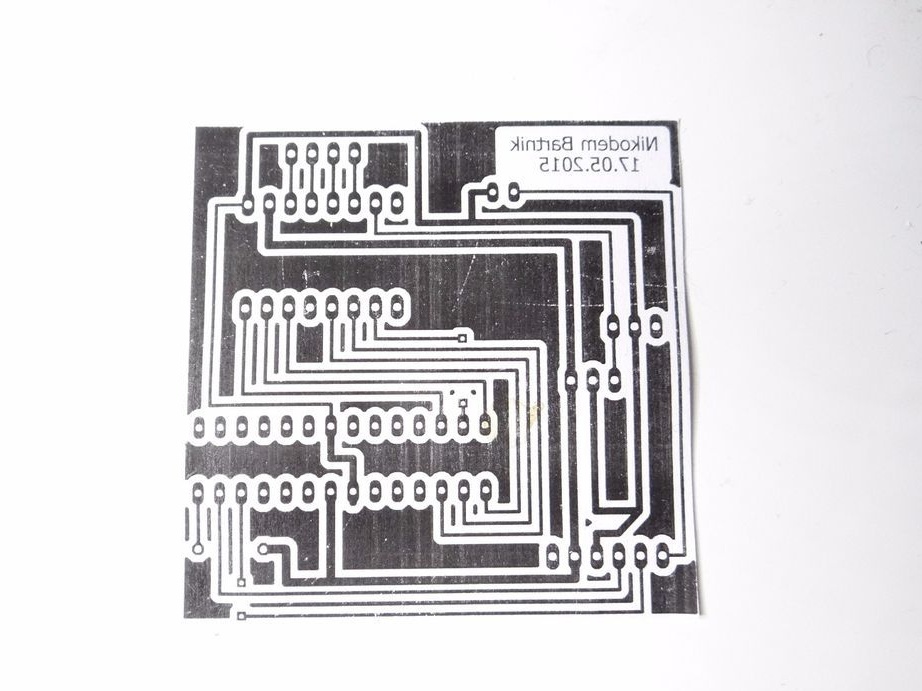
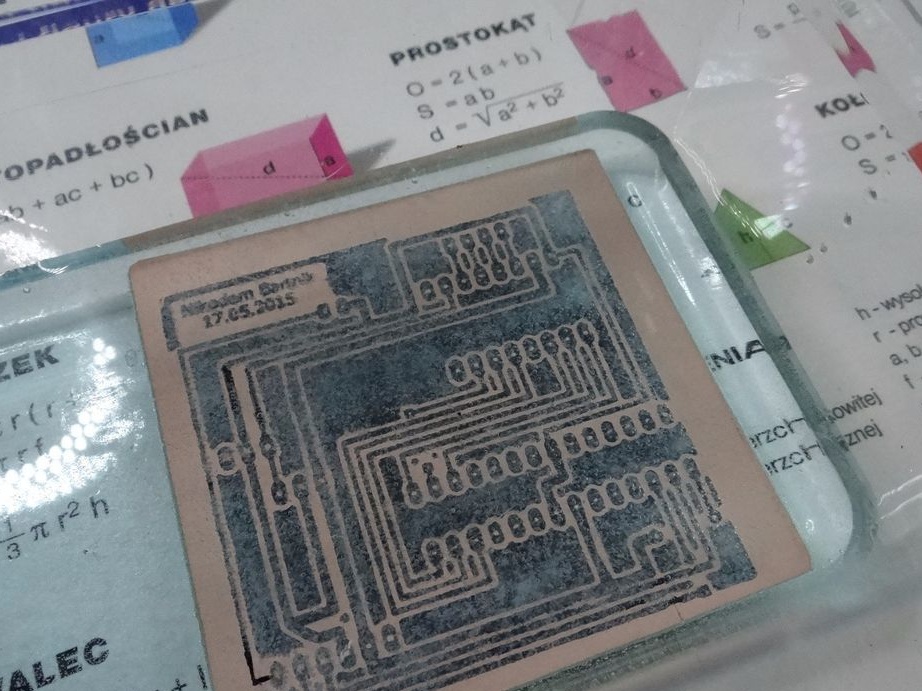
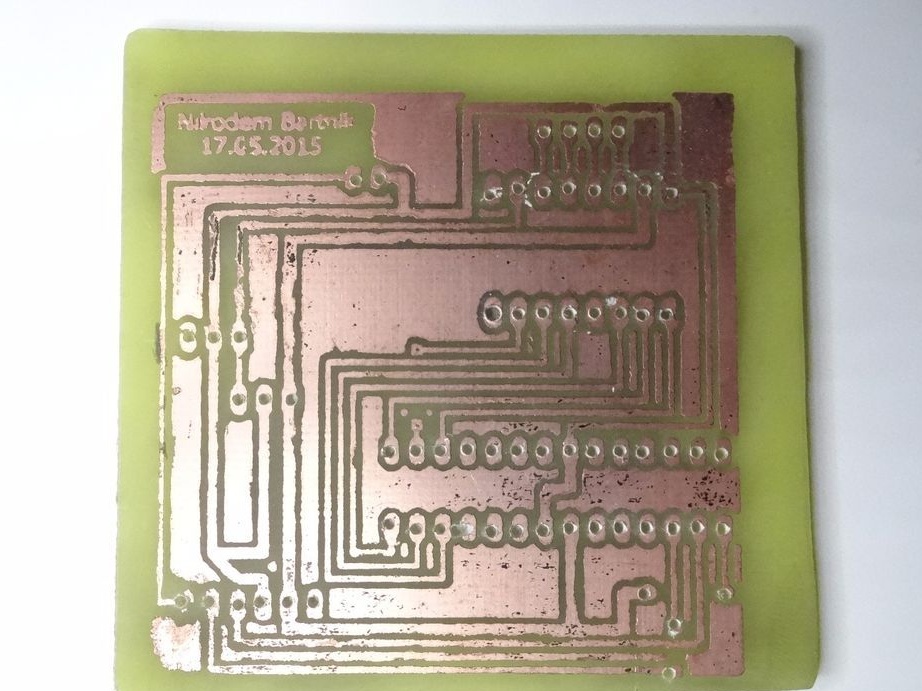
- Ætset og boret PCB (til version uden Arduino)
- Bor, loddejern.
- Arduino Uno. For dem, der ikke ved, hvilke konklusioner Arduino Uno er nødvendige, i den vedhæftede filbeskrivelse.
Program til Arduino
Programmet til Arduino er meget enkelt. Arkivkoden til dette program.
Program til telefon
I dette arkiv er programmet til telefonen installeret, som et almindeligt program, og kildekoden til dette program. Importer det til Android studio, indsamle apk-filen og installer den på din smartphone.
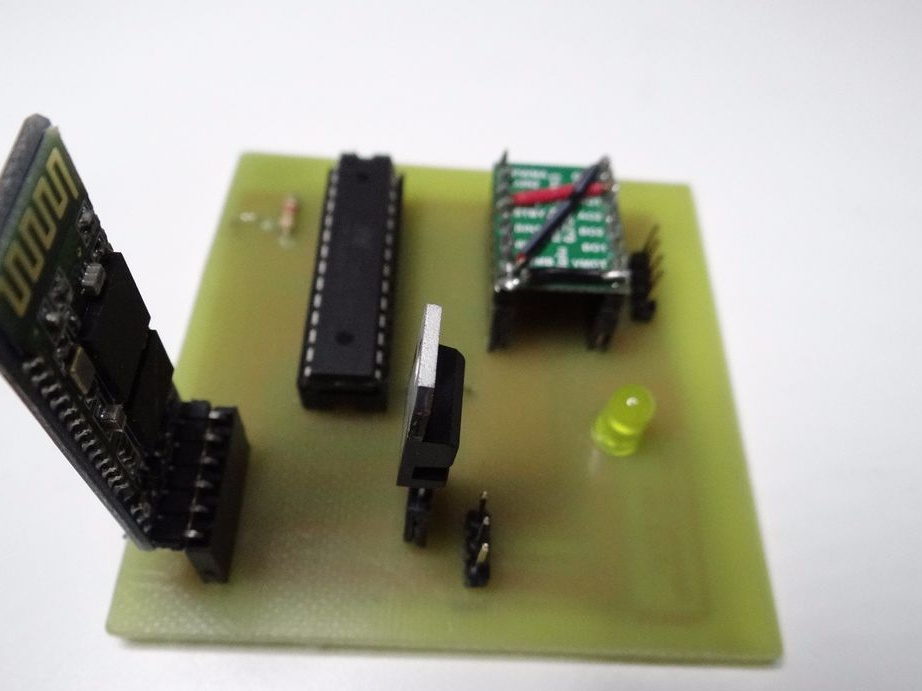
Dette program bruger Bluetooth bare til at sende data. Biblioteksbeskrivelsen (openCV) kan findes på Internettet. Forfatteren lavede et printkort til atmega 328. Husk dette, hvis du ikke vil bruge en brødbræt, men vil distribuere dit signet: