


God eftermiddag, i dag vil jeg dele instruktioner om fremstilling af en tank. Der vil være to muligheder for den interne controller: ESP -8266 og Arduino Pro Mini. I den første version udføres kontrol via Wi-Fi-kommunikation. I den anden - IR fjernbetjening. Det er lavet på basis af TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), det drives af et Tamiya 70097 Twin-Motor Gearbox Kit og de motorer, der fulgte med gearkassen.
Vi har brug for:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- modellim (f.eks. TAMIYA Cement)
- Tamiya 70097 Twin-Motor Gearbox Kit
- ESP 8266 -12E eller Arduino Pro Mini 8MHz 3.3V
- spændingsstabilisator AMS 1117 3.3v 8000mA (hvis option med ESP 8266-12E)
- Qifei L9110 motordriver
- kondensator 10v 1000uF
- LED i to farver (rød, grøn)
- blå LED
- 2 røde lysdioder
- IR-modtager
- fotoresistor
- 2 rum til 2 AAA-batterier eller 4 AAA 1,2V 1000mA NI-MN-batterier
- 2 modstande 2ohm
- 4 modstande 75 ohm
- 6 modstande 10 kOhm (hvis option med ESP 8266-12E)
- knap
- fotoresistor
- USB - TTL
- loddejern
- flerfarvede ledninger
Trin 1 Hus og mekanik.
Først skal du samle modellen TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Vi limer den nederste del i henhold til instruktionerne, med undtagelse af de dele, der dækker udløbsåbningerne til gearkasse aksler. Ledende stjerner klæber heller ikke. Lim den øverste del i henhold til instruktionerne uden ændringer. Efter at have limet alt dette, lad det tørre og fortsæt med at samle gearkassen. Som det fremgår af instruktionerne, kan Tamiya 70097 samles i to forskellige versioner.
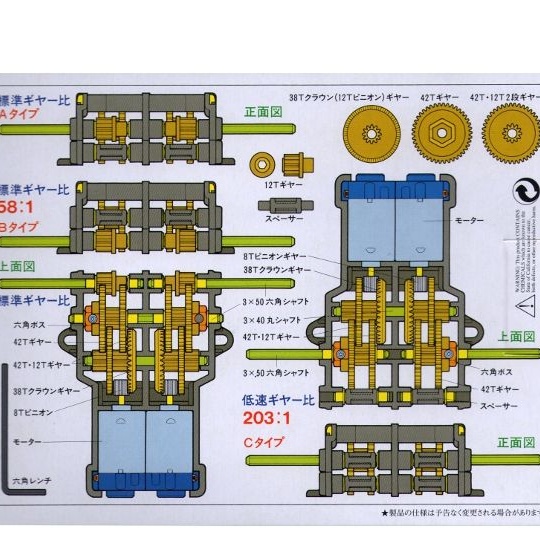
Den første mulighed med et gearforhold på 58: 1, det andet - 203: 1. Vi har brug for den første mulighed. Og her er heller ikke så simpelt. I dette tilfælde kan aksens udgang være nærmere bunden af gearkassen eller i midten. Udånding af akserne skal udføres i det midterste hul! Efter at have samlet gearkassen fortsætter vi med at installere den på modellen. I teorien skal alt være enkelt, fordi både firmaets og gearkassens model og gearkasse. I praksis måtte gearkassen skubbes der. I gearkassens vandrette position bulede drivhjulernes aksler opad, så vi måtte skære en metalplade, hvilket gjorde det muligt at fastgøre gearkassen i den ønskede position.

Gearkasseakslerne skal klippes med 3 mm. Lim derefter drivhjulene på dem.

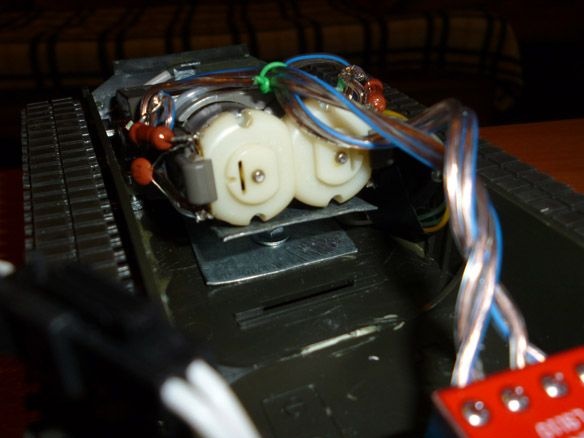
I den øverste del tættere på bagsiden laver vi huller til en tofarvet LED og en IR-modtager.

Tættere på fronten er et hul til en blå LED, der fungerer som lommelygte.

Og inde i lugen - til en fotoresistor.

På bagsiden limes de røde lysdioder til belysning.

Til alt det ovenstående skal du lodde ledningerne. Det er mere praktisk at gøre dette før installationen.
Trin 2 Elektriker
Her vil jeg give et valg af muligheder for yderligere montering.
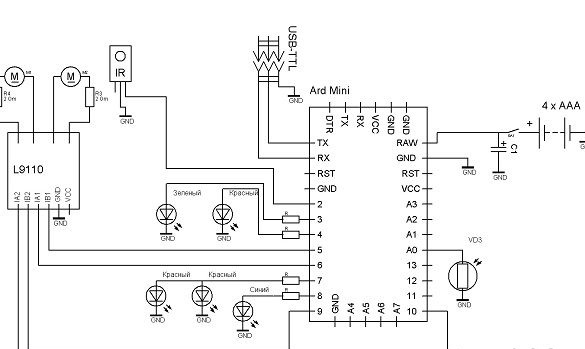
Hvis du valgte ESP 8266. Det indbyggede Wi-Fi-modul letter processen med kontrol og forbindelse meget.Det kan let programmeres i Arduino IDE. Det er bedst at vælge et modul med 4 Mb hukommelse. I dette tilfælde er det nødvendigt at samle minimumsselen for at starte og blinke ESP-8266. Kun VCC-stiften er tilsluttet direkte til strømforsyningen, de resterende stifter: CH_PD, RESET, GPIO0, GPIO2, skal trækkes til strømforsyningen (VCC) via en modstand. 10 kOm modstande kan udskiftes med andre fra 4,7 kOm til 50 kOm, undtagen for GPIO15 - dens værdi skal være op til 10 kM. Direkte til minus (GND) for strømforsyningen forbinder vi kun GND, og vi trækker også GPIOO gennem modstanden til 10 kOm for at sætte modulet i firmwaredownload-tilstand, til GND. Knappen er nødvendig for at genstarte og blinke modulet. USB-TTL-stik - til firmware.
Her er et diagram
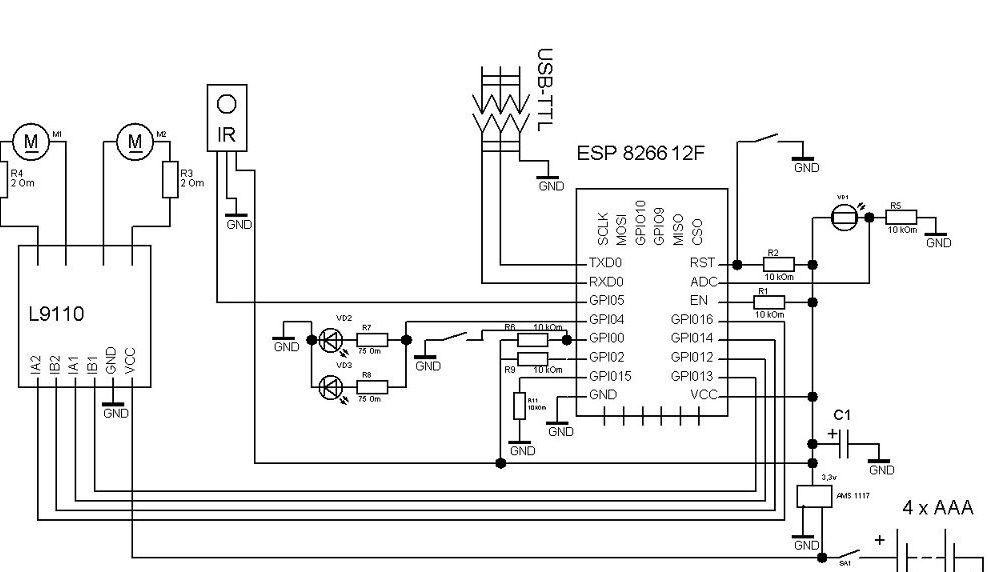
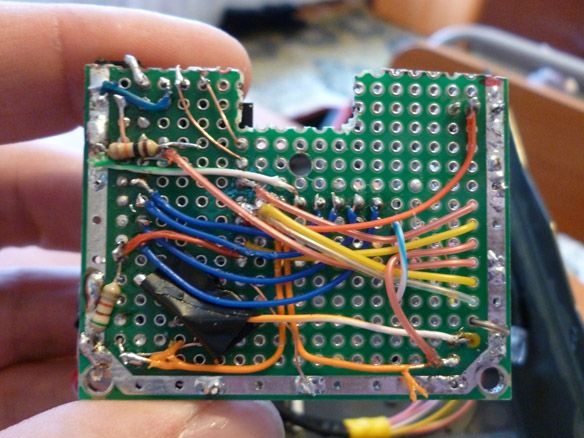
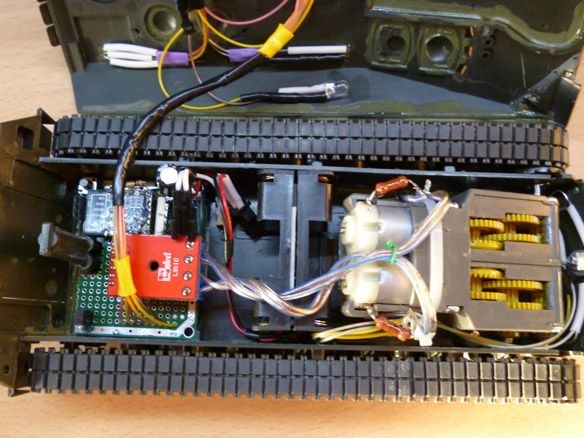
Lad mig forklare lidt, de blå og to røde LED'er er nødvendige til baggrundsbelysning (det er synligt og smukt i mørke), fotoresistoren er tilsluttet ADC på controlleren og er nødvendig for at bestemme belysningen (når baggrundsbelysningen bliver mørk). 10 kOhm pull-up modstande, 75 Ohm til LED'er, 2 Ohm strømbegrænsning for motorer (uden dem, når man prøver at bevæge sig, overbelastede regulatoren). Vi lodder alt efter kredsløbet på kredsløbskortet. Til strømforsyning kan du bruge 4 "små" batterier eller fire AAA-batterier, loddede i serie. Vi limer to rum på to batterier med dobbeltsidet bånd og forbinder i serie. Både batterirum og akkumulatorer er placeret mellem gearkassen og kredsløbskortet.

Hvis dit valg faldt på Arduino. Kun Arduino Pro MINI passer ind. Det er værd at vælge et 3,3 volt kort, da motorerne er designet til 3 volt effekt, og du ikke ønsker at drive motorerne og Arduino separat. Arduino er lettere. Hele reguleringssele og spændingsregulator er allerede på selve tavlen. Det gjenstår at losse Arduino-stikket og motordriveren på kredsløbskortet.

Trin 3 Forberedelse af programmeringsmiljøet.
For at redigere firmwaren og udfylde skitsen i ESP skal du installere Arduino IDE fra det officielle site af Arduino.cc samt installere tilføjelsen til ESP gennem Boards Manager. For at gøre dette skal du starte Arduino IDE, derefter Filer - Indstillinger - i feltet Yderligere tavlehåndterer URL, indsæt linket
http://arduino.esp8266.com/package_esp8266com_index.jsonKlik på OK (du kan indtaste flere links adskilt af et komma i dette felt). Næste værktøjer - Board - Boards Manager i filterfeltet, indtast esp8266 og klik på ESP8266 af ESP8266 Community Forum. Klik på Installer, og vent på, at downloadet er afsluttet. Nu gjenstår det at vælge Board - Generic ESP8266 i menuen Funktioner og indstille frekvensen på dit modul til 80 eller 160 MHz, størrelse på flashhukommelsen og vælge den serielle port, som USB-TTL-adapteren er forbundet til.
For Arduino skal du blot installere Arduino IDE fra det officielle Arduino.cc-websted.
Trin 4 Firmware
Det gjenstår at redigere skitsen og udfylde den med ESP.
I feltet "String _ssid =" ";" mellem citater angiver hvilket adgangspunkt du vil oprette forbindelse til.
"String _password =" ";" er adgangskoden til dette netværk.
"String _ssidAP =" Mardella ";" navnet på det netværk, som ESP hæver, hvis det ikke opretter forbindelse til det eksisterende.
"String _passwordAP =" 12345678 ";" - adgangskoden til det netværk, som ESP hæver, hvis det ikke opretter forbindelse til det eksisterende.
"String SSDP_Name =" Mardella ";" SSDP-navn
Efter start forsøger ESP at oprette forbindelse til det adgangspunkt, der er angivet i skitsen, hvis det er vellykket, skal du bestemme IP-adressen på vores robot og oprette forbindelse til denne adresse gennem en browser. Du kan også gå gennem en computer til netværksinfrastrukturen, finde vores tank der og dobbeltklikke for at oprette forbindelse til den. Hvis forbindelsen mislykkes, bliver ESP adgangspunktet. Derefter kan der opnås adgang ved at oprette forbindelse til et nyt adgangspunkt og indtaste 192.168.1.1 i browseren.
Webgrænsefladen består af to sider. Den første til at kontrollere. Det andet er til tilpasning. På den anden side kan du specificere det adgangspunkt, som du vil oprette forbindelse til, samt navnet på tanken og navnet og adgangskoden på det adgangspunkt, som ESP rejser. Alle ændringer træder i kraft efter en genstart. Du kan også genstarte modulet via webgrænsefladen.
For Arduino skal du redigere alle felterne "results.value". Efter at have skrevet IR-koderne på konsollen, som du vil bruge der.

Video tanchika: