
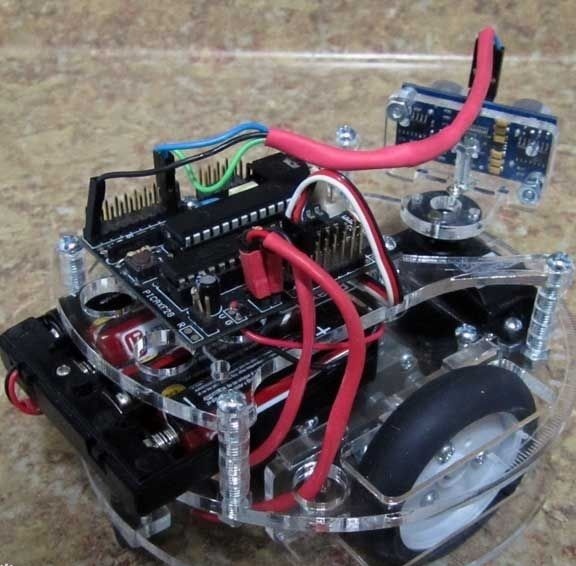
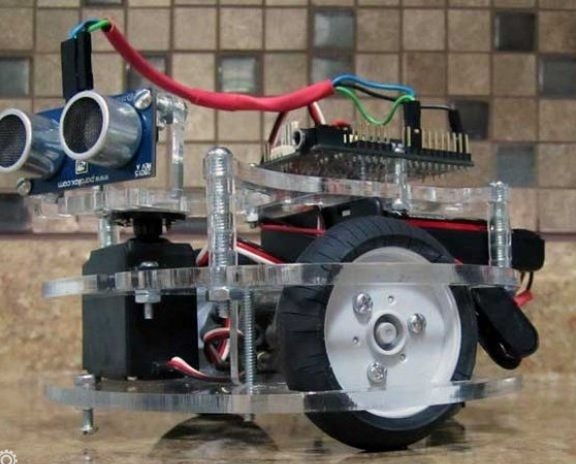
Hovedfunktionen i denne robot er, at den er i stand til at omgå eventuelle hindringer. For bedre og lettere justering af roboten på dækket er der en skala med en vinkel på op til 90 grader. Platformens størrelse på roboten er 5 tommer, den er også udstyret med en ekkolod.
Hvad angår strømkilden, kan forskellige kombinationer bruges her, batterier med en regulator kan bruges.


Under testene roboten viste fremragende resultater både i en lige linje og på en skrå overflade. Det kan udføre en række forskellige funktioner og kan udstyres med en række forskellige komponenter.
Udskæringer kan ses på robotens øverste mast, de er nødvendige for at modtage lydpulser. Der er infrarøde sensorer på roboten, de skal være de samme.
Forfatteren brugte Tamiya 70097 som en motor til roboten, hvad angår hjulene, de blev hentet fra Tamiya 70145. Derudover kan du bruge en mikro eller standard servo med en adapter.
Materialer og værktøjer til fremstilling af roboten:
- laserskåret robotdel;
- krympe rør, ledninger, stik;
- bolte 41,25 "# 6-32 (de kan købes i hardware butikker);
- 2,75 "# 4-40 bolte;
- 42 "# 6-32 bolte;
- 4,5 "# 4-40 bolte;
- et servo-drev og alle komponenter til det (mikro, men standard er bedst);
- infrarød sensor eller ekkolod (i dette tilfælde PING);
- motortype Tamiya 70097;
- hjul fra Tamiya 70145;
- mikrokontroller Arduino (i dette tilfælde anvendes Picaxe 28x1).

For at reducere lodning til et minimum kan et avanceret servo-drev bruges. Det vil således være muligt at undgå lodning af to kontakter på hver motor. Motorer kan også tilsluttes via crimp-stik, så kan du helt glemme at lodde. Men for bedre arbejde med roboten anbefales det at lodde kontakterne pålideligt.
Til disse formål skal du stadig fylde loddejern, multimeter, skruetrækkere og så videre.
Robotsamlingsproces:
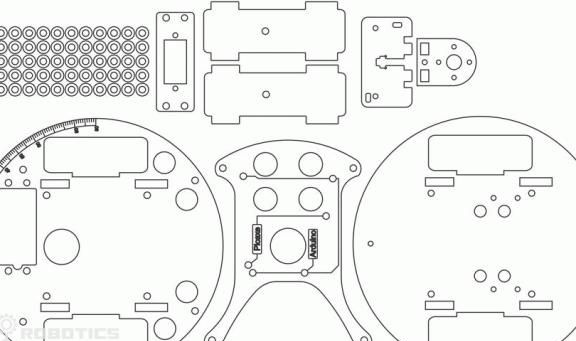
Første trin. Klip hovedelementerne i kroppen ud
Først og fremmest skal du ved hjælp af en laser skære hovedelementerne i robotlegemet ud. Til disse formål skal du bruge tegningerne, der er knyttet til artiklen.
Trin to Vi studerer e robot kredsløb
På billedet herunder kan du se, hvordan alle robotens elementer er forbundet. PICAXE-controlleren og Tamiya 70097-motoren blev taget som et eksempel. Efter installation af firmwaren og tilslutning af roboten vil den straks begynde at fungere som den skal.
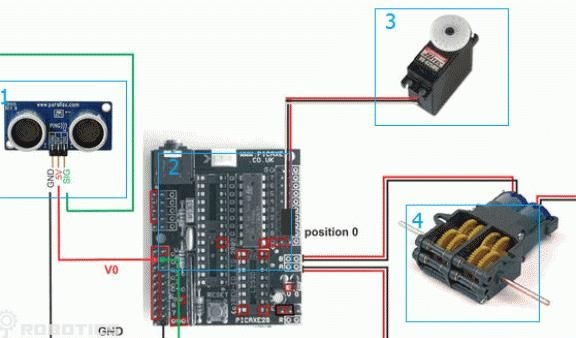
Under nummer 1 på billedet markeres en Parallax PING-ekkolod. Under nummer 2 er Parallax PING-pladen. Tallet 3 angiver standard servomotor og Tamiya 70097 motor nummer 4.
Trin tre Robot øje samling
Montering af roboten begynder med det mest interessante fra montering af ekkoloddet. For at installere det er der behov for 1 .75 "bolte, 2 .5" bolte, 2 pakninger og tre møtrikker. Designet samles meget enkelt, plastplatformen er fastgjort til servomotoren, og der installeres sensorer på det, dvs. robotens "øjne". Således vil han være i stand til at vende dem og se sig omkring.

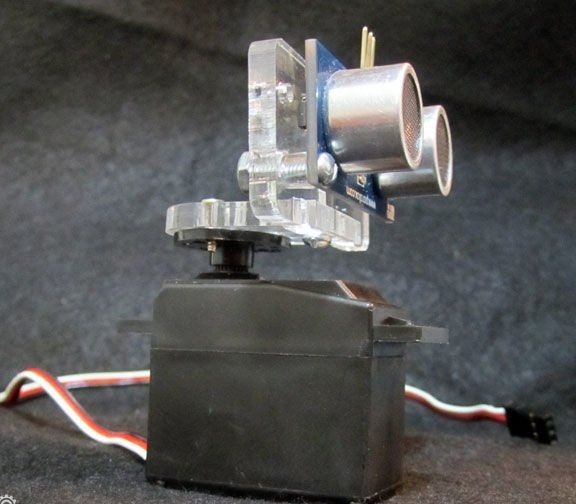
Trin fire Installer servomotoren
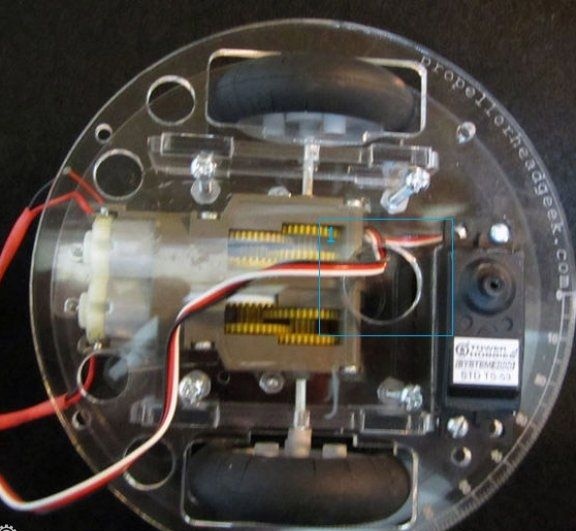
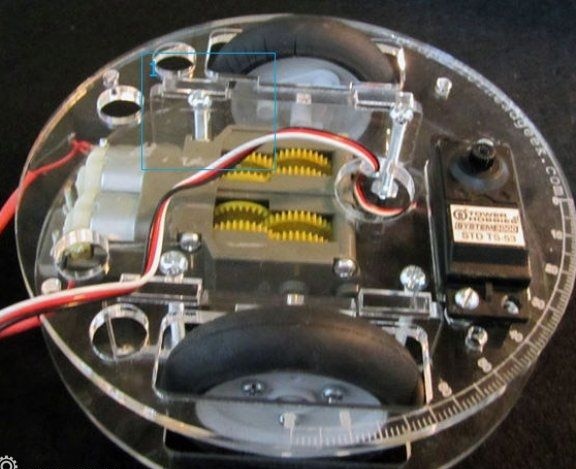
Servomotoren skal monteres sikkert på det øverste dæk på det angivne sted. Til disse formål har du brug for bolte med møtrikker. 2 "5" i størrelse. På billedet kan du se, hvordan den installerede motor ser ud.

På samme trin skal du tilslutte mikrokontrolleren til transportkortet. Til dette har du brug for 1,75 "skruer, pakninger og møtrikker.
Trin Fem Sætte det nederste dæk
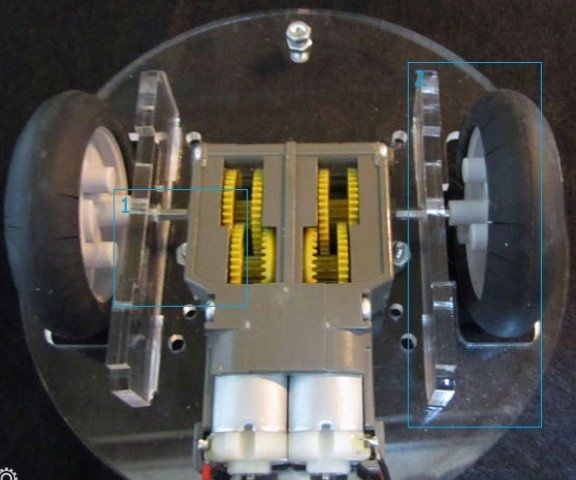
Motoren skal sammen med stolperne og hjulene fastgøres som et integreret element til robotens nederste dæk. Til disse formål skal du finde de bolte og møtrikker, der følger med motoren. Flere bolte med møtrikker skal installeres i begge ender af platformen. Til stille formål skal du bruge bolte og møtrikker i størrelse 2 .5 ".
På billedet kan du se, hvordan alle elementerne er fastgjort til robottets dæk.
Trin seks Tilslut dæk
Nu skal du forbinde de to dæk sammen. Til disse formål bruges bolte med møtrikker på 41,25 ". Under nummeret 1 kan du se bolten 1,25".
Servomotorens ledning skal ledes ud gennem hullet i platformen.
Syvende trin. Installation af et mediekort
Bærepladen er fastgjort til robotens øverste dæk. Til disse formål har du brug for bolte med møtrikker 41,25 "såvel som 20 pakninger. Alternativt kan 1" sekskantet pakning bruges. Ved hjælp af dem vil det være muligt hurtigt at ændre dækkets højde for at installere forskellige typer strømkilder.

Trin otte. Installation af ekkolod og servomotor
En tændstik med en ekkolodd er forbundet til regulatoren, og den er fastgjort til aksom på servomotormotoren ved hjælp af specielle bolte, der følger med sættet. Som konklusion skal du installere et batteri, til disse formål kan du bruge tape eller lim.
Det er alt, roboten er klar. Når du har installeret firmwaren og tilsluttet strømmen, kommer den straks til live. I fremtiden vil roboten være i stand til at forbedre eller tilføje forskellige nye funktioner.