


Lad os først forstå forskellen mellem octocopter og quadcopter. Ud over navnet er dette også antallet af motorer på skinnerne. dvs. quadrocopter - fire motorer, octocopter - otte. Dette gælder også for hexacopteret - seks, tricopter - tre osv. Hvis der f.eks. Er fire (X) guider og otte motorer, er dette stadig en octocopter, men betegnes som X8. dvs. på fire skinner, otte motorer.
Grundlæggende er numre med et præfiks til koptere fly, der styres af operatørens radiosignal fra jorden. En studerende fra Indien besluttede at gå videre og fremstille en octocopter, der var i stand til at rejse en person i luften. Dette er ikke et billigt projekt. Finansieringen blev overtaget af uddannelsesinstitutionen.
Værktøjer og materialer:
- Motorer Turnigy CA170-motorer - 8 stk;
- Controller Turnigy Fatboy 300A - 4 stk;
- Turnigy 200A HV-controller - 4 stk;
- sender Hitech XG11 Tx / Rx;
-Flight DJI A3 Pro-controller;
-Flight-controller DJI Naza M V2;
- Batteri Zippy 22.2V 5Ah 40C LiPo - 16 stk.
- Oplader 6s LiPo oplader;
-XT150 stik - 50 stk;
-Wire 8AWG Sillicone Wire - 10 meter;
-Servoprivody;
-Kugle til at spille squash (Squash Balls) - 4 stk;
- MDF ark 25 cm x 50 cm x 2 mm;
-Drel;
- Vinkelsliber;
- Skruetrækkere;
- skruenøgler;
- Tænger;
-Laseskærer eller båndsav;
-Sortiment af møtrikker 4 mm, 6 mm og 8 mm, bolte og skiver;
-Gorelka;
-LED LED;
-Lodning tilbehør;
- 2 og 3 mm ståltråd;
-Telrep skrue 100mm-200mm - 40 stk;
- 40 kroge og øjenbolte;
-Tachometer Turnigy RPM;
-Power Analyzer (Turnigy Wattmeter / Ampmeter);
-Battery controller;
- Aluminiumsprofilrør;
-Aluminiumplade;
- Dobbeltsidet bånd;
-Svejsemaskine;
-Ruletka;
-Computer med Fusion 360;
- Batteri 11,1 V 2200 mAh LiPo 30C;
-Tæt stof 1,2 m x 1,2 m;
- Stærk tråd og nål;
-Bæltesikkerhed;
Trin 1: Design
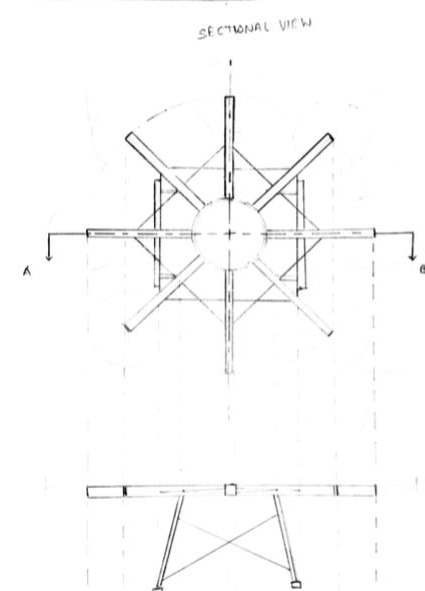
Ved udviklingen af en bemandet octocopter overvejede mesteren forskellige konfigurationsmuligheder og X8 og H og T, men kom til den konklusion, at den mest optimale af forskellige grunde ville være designen af octocopter ifølge det traditionelle skema.
Derefter var det nødvendigt at finde ud af, hvad størrelsen på octocopter skulle være. Beregningerne blev foretaget ved hjælp af CAD-modeller på Fusion 360 som eksempel. De eksisterende skruer blev taget med i beregningerne. Det optimale viste sig at være en diameter på tre meter, en højde på en meter. Indvendig kurv, til en person 55x55 cm.

Trin to: Indkøbskurv
Rammen blev svejset fra en firkantet aluminiumprofil med en hylde på 50 mm og en vægtykkelse på 2 mm.
Profilen blev skåret og svejset. Sømmene rengøres.



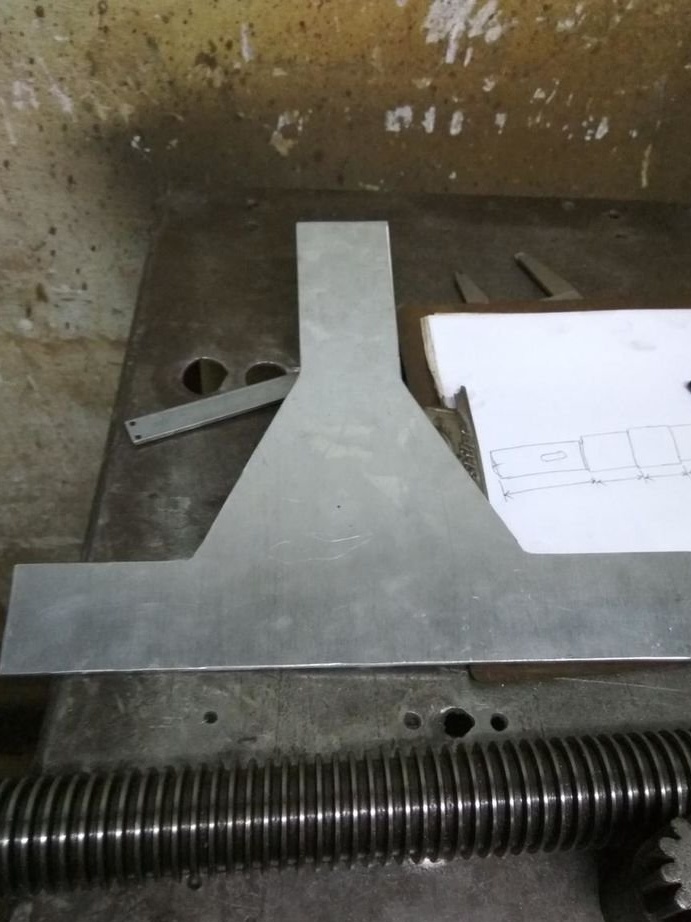
Trin tre: Montering af plader
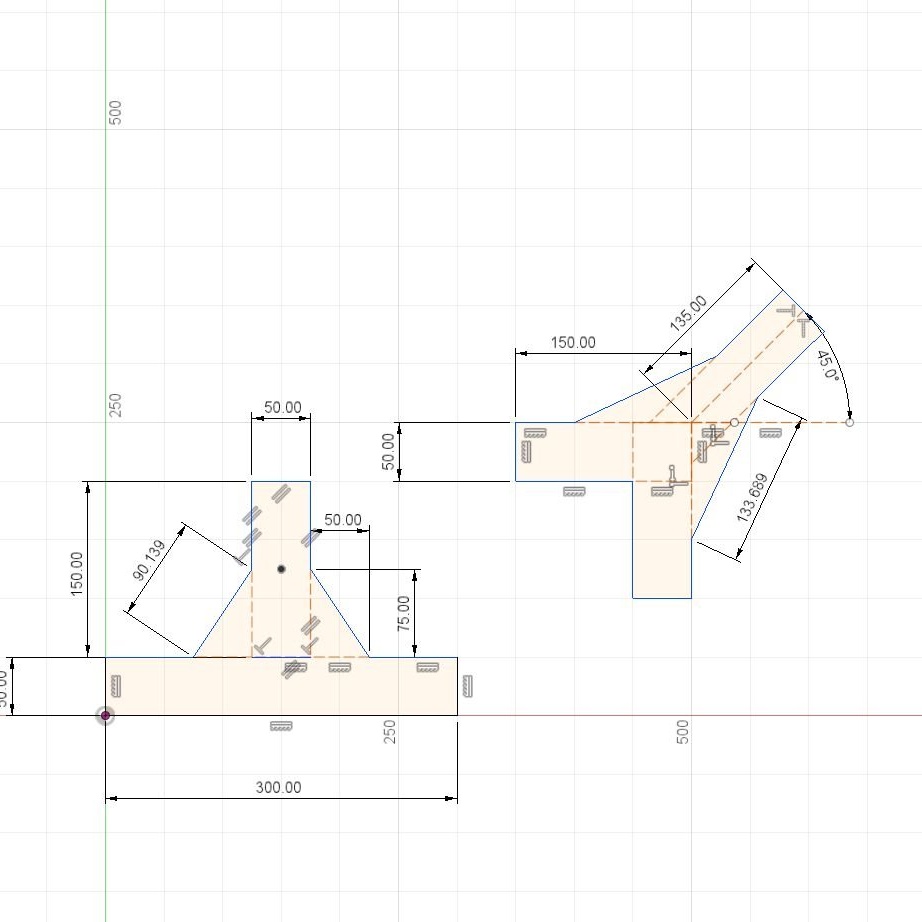
Til konsoller brugte master master aluminiumsplader på 1,5 mm. Der er otte beslag, fire i hjørnerne og fire i midten af rammen. Længden af armskulderen og den bærende del er 15 cm hver. Beslagene er designet i Fusion 360. Pladerne blev skåret med en fræser. Der bores monteringshuller i dem. Derefter blev konsollerne svejset til rammen.






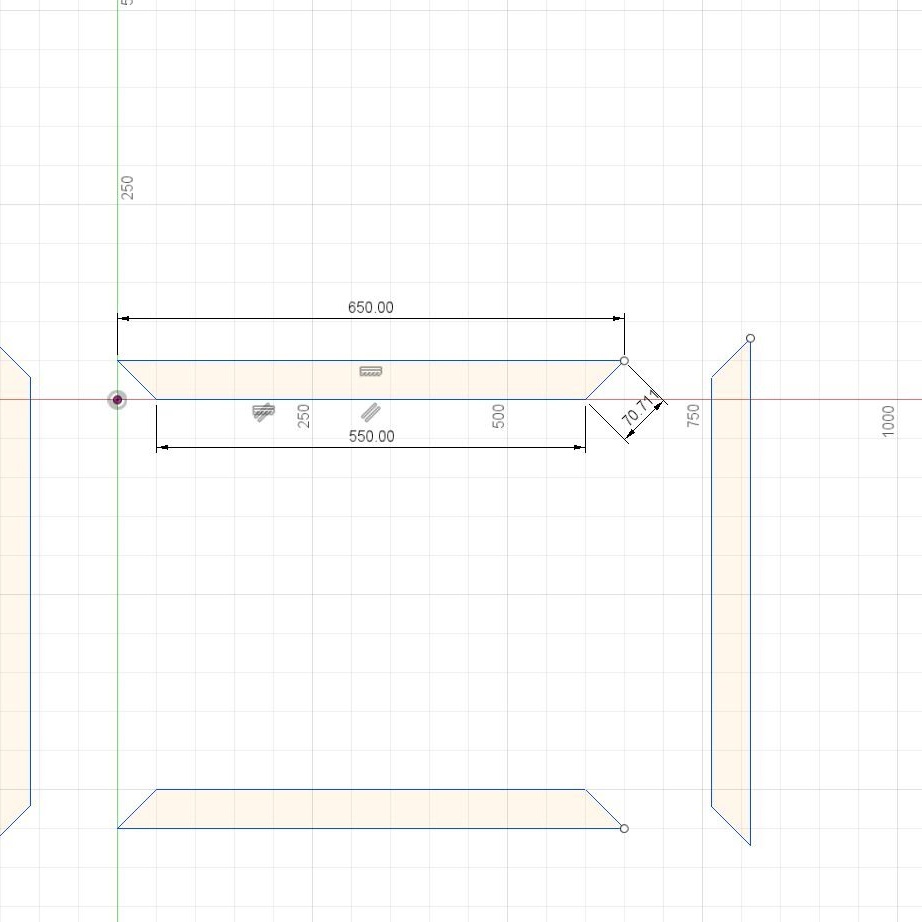
Trin fire: Carrier-profil
Disse profiler er fastgjort til beslagene, og motorerne er installeret i deres ender. Profilerne er firkantede, 50 x 50 cm og har forskellige længder. Profiler, 112,5 cm lange, er fastgjort i hjørnerne, 125 cm i profil på siderne. Et udskæring foretages i vinkelprofiler i en vinkel på 45 grader. Det er nødvendigt, at dens endeflade støder op til vinkelplanet.
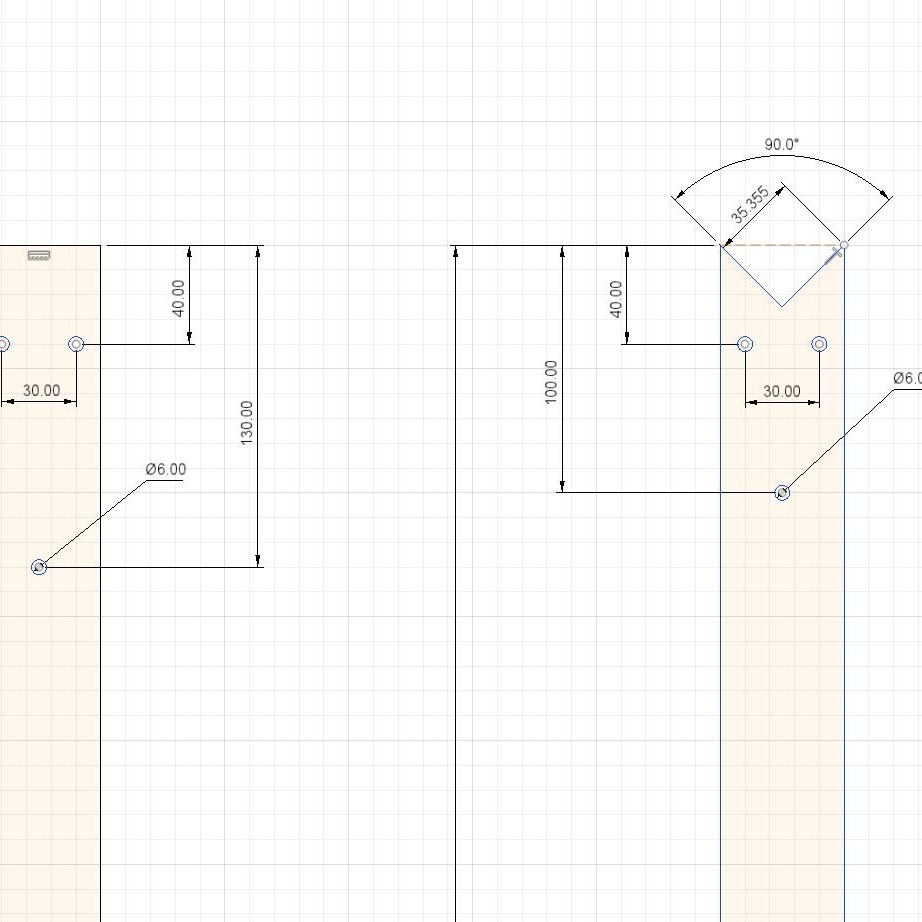
For at fastgøre profilerne på beslagene borer masteren huller til boltene.




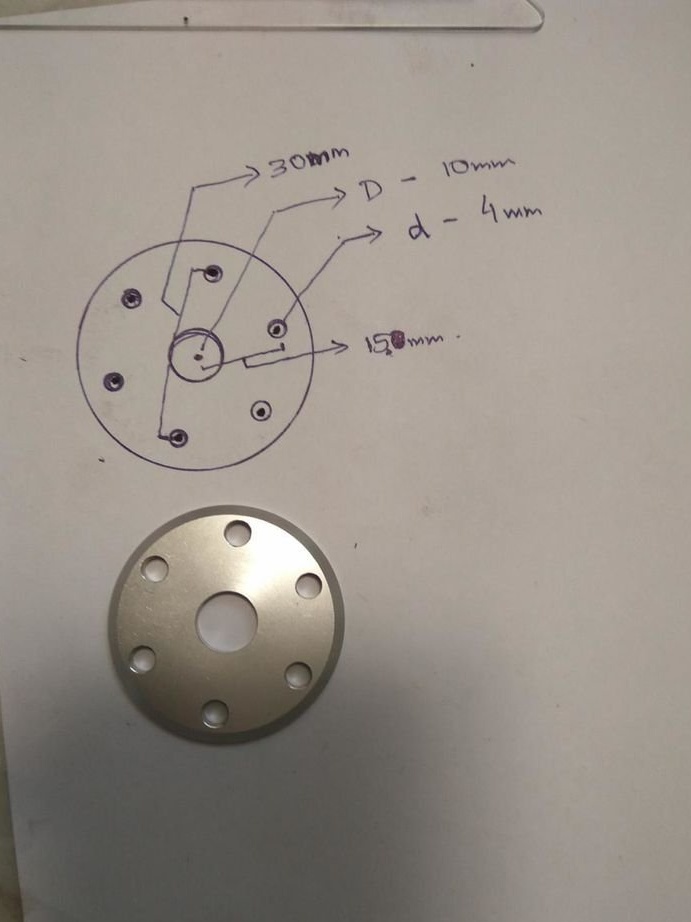
Trin fem: Motorophæng
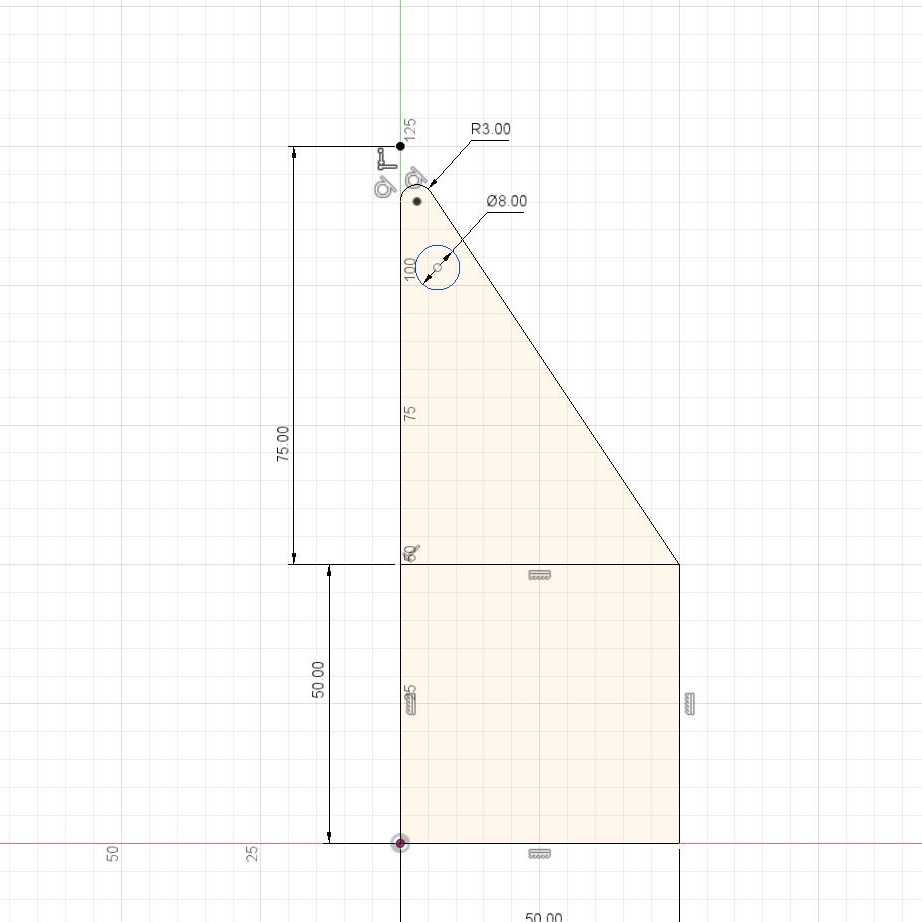
Motorer skrues fast på en firkantet aluminiumplade. Fra bunden af pladen, parallelt med hinanden, skrues to hjørner fast. Afstanden mellem dem er lig med profilens bredde. Desuden er pladen med motoren monteret på profilen, monteringshullerne bores, og alt er snoet med bolte.





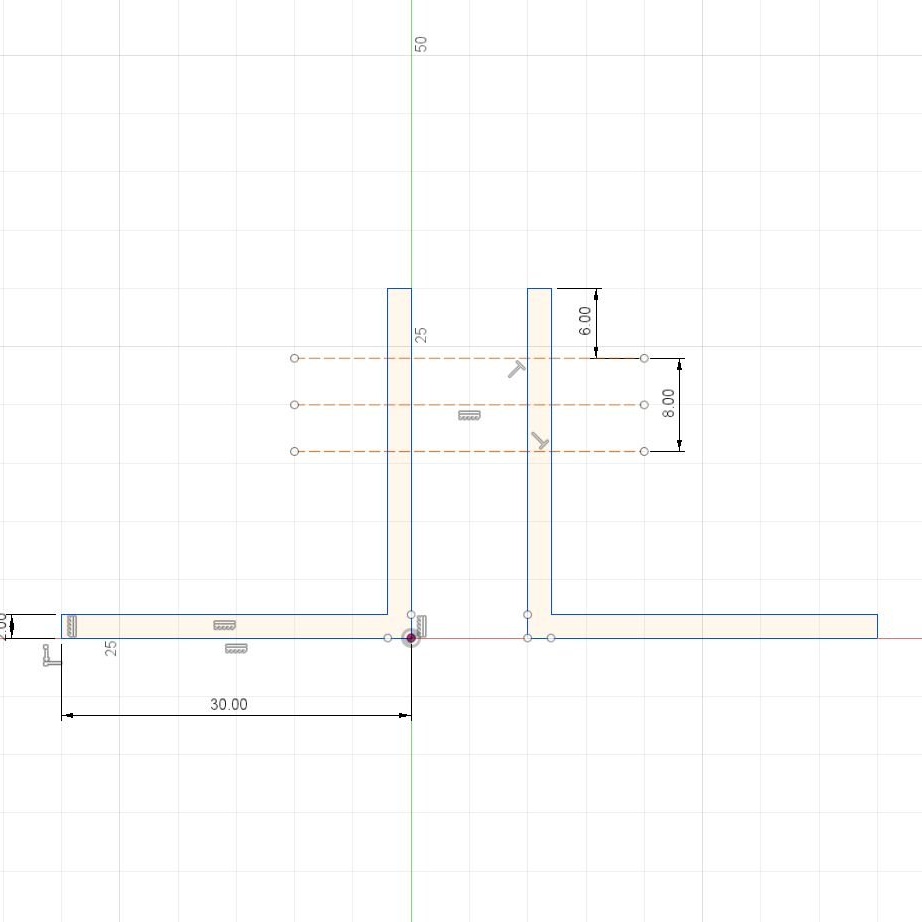
Trin seks: Chassis
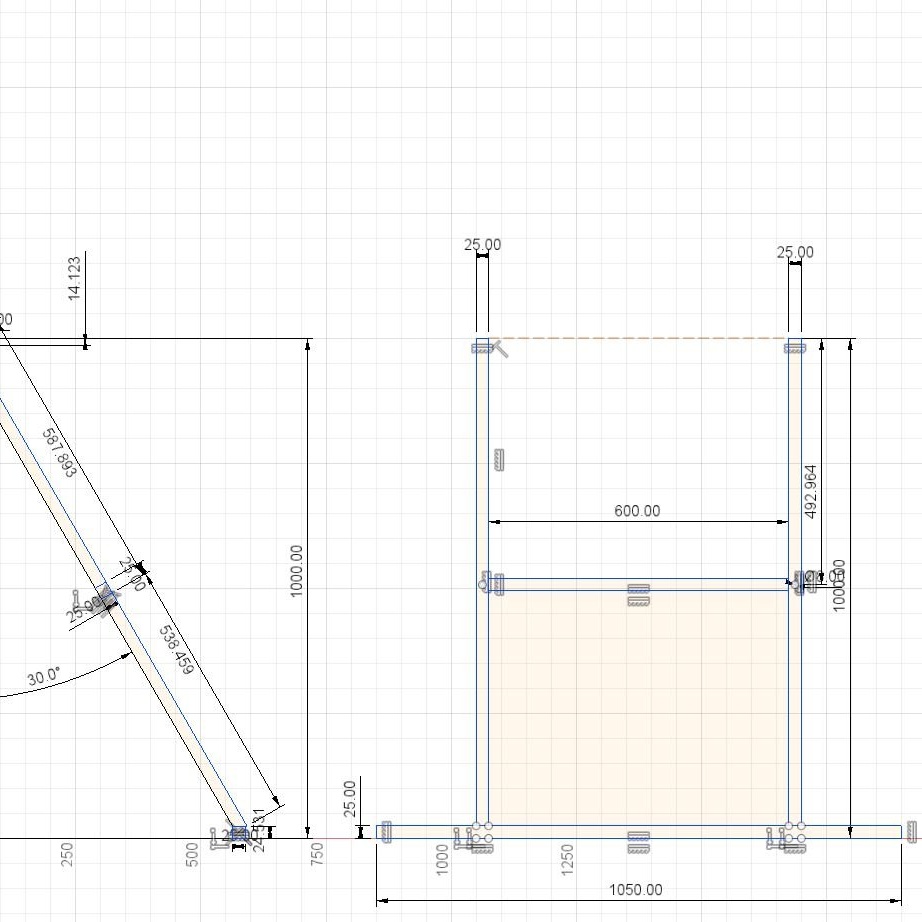
Chassiset var lavet af aluminiumsprofiler 25 x 25 mm og en tykkelse på 3 mm. Alle dele blev svejset, og deres størrelser kan ses på billedet. Ideen var at montere chassiset ud af kurven i en vinkel på 30 grader. For at forhindre beskadigelse af chassiset trækkes støttekabler mellem dem.


Trin syv: Understøttelse af supportprofiler
Efter installation af motorerne begyndte understøttelsesprofilerne at bøjes. Så prøvede mesteren at starte motoren og fandt ud af, at profilerne "går". Det var nødvendigt at styrke designet.
Tilføjelse af plader ville tilføje strukturen for meget vægt. Så besluttede mesteren at lave et V-formet design fra kurven og ned. Reb er fastgjort til dens nedre del. De andre ender af kablerne er fastgjort til beslagene i midten af støtteprofilerne. Kabler trækkes med en talje. Strukturen bliver således stiv.















Trin otte: Opret forbindelse
Først sælger masteren stikkene til ledningerne.


Derefter begynder installationen. Hver motor skulle kontrolleres for rotationsretningen. Hvis det er nødvendigt, er det let at ændre motorens omdrejningsretning og følgelig skruen ved at skifte to af de tre ledninger, der kommer fra ESC til motoren. Efter at alle motorerne var tilsluttet korrekt, lavede guiden installationen i henhold til tilslutningsdiagrammet fra fabrikanten.
Flyveledere IMU DJI A3 er meget følsomme over for interferens fra metaller, og masteren kunne ikke konfigurere systemet på grund af interferens. Som et resultat erstattede skibsføreren A3 med Naza M V2, der havde en lignende forbindelsesplan. Naza M V2 arbejdede meget pålideligt.
Derefter forbinder guiden batterierne. På hver bæreprofil er to 22,2 V-batterier forbundet i serie.



Trin ni: Pilotsæde
Sædet var syet af holdbart stof. Der er også fastgjort et sikkerhedsbælte til piloten, der er fastgjort til rammen, og en hjelm.






Trin ti: Første flyvning
Før pilotens flyvning på octocopter blev der udført adskillige tests med en sandpose og derefter med en model af en person. Under flyvningen blev forskellige situationer simuleret fra tab af kontrol til et vindpust.
Efter alle testene fløj piloten endelig i luften.






Før du flyver, skal du udføre følgende handlinger.
Kontroller tætheden på bolte, kabler, motormontering.
Kontroller ledningerne.
Kontroller, at skruerne let roterer.
Sørg for, at alle ESC'er er slået til.
Sørg for, at alle batterier er korrekt tilsluttet og opladet.
Tilslut strøm til flyvemaskine til initialisering og kalibrering.
Efter tilslutning til GPS skifter den til fuldautomatisk tilstand (Alt. + Att. Hold).
Sæt dig i pilotsædet og spænd dig op.
Tilslut alle batterier til ESC.
Tilslut de to batterier i serie (ESC-RB-RB-ESC) ved hjælp af en modstand for at fjerne gnisten.
Tænd motorerne ved at dreje kontakten til tændt position.
Brug controlleren til at kontrollere octocopter.