

Artiklen vil overveje et eksempel på at oprette en legendarisk robot kaldet "Canbot". Hovedparten af detaljerne til roboten er trykt på en 3D-printer. Robotten styres fjernt.
Materialer og værktøjer til hjemmelavet:
- En Atmel Attiny85-mikrocontroller;
- to mikroservices HXT900 eller deres analoger;
- et 3,7V LiPo-batteri;
- en infrarød modtager ved 38 kHz;
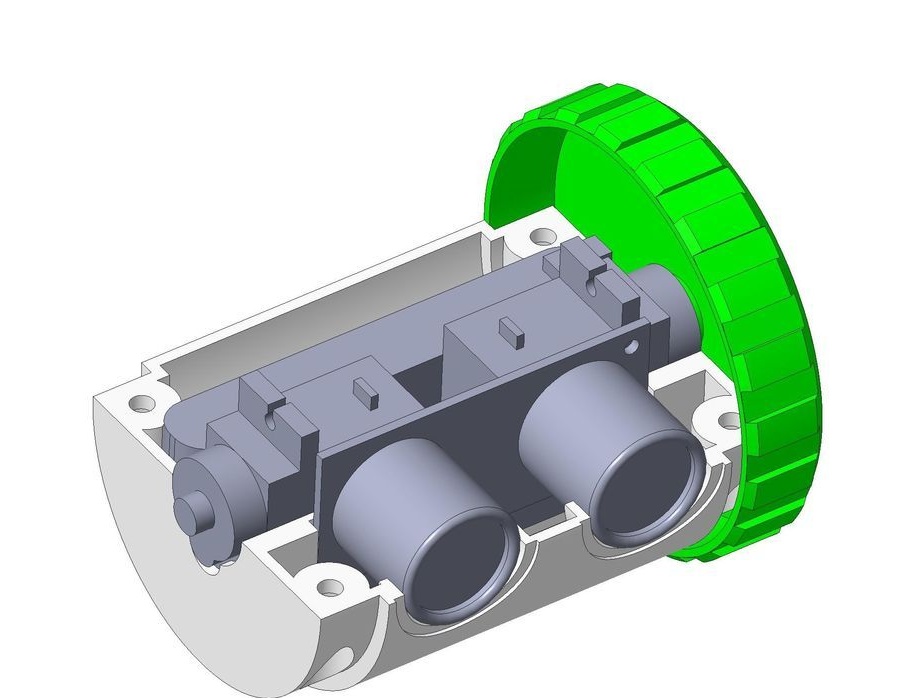
- ultralydstransducer type HC-SR04;
- 9x4mm switch eller jumper i stedet;
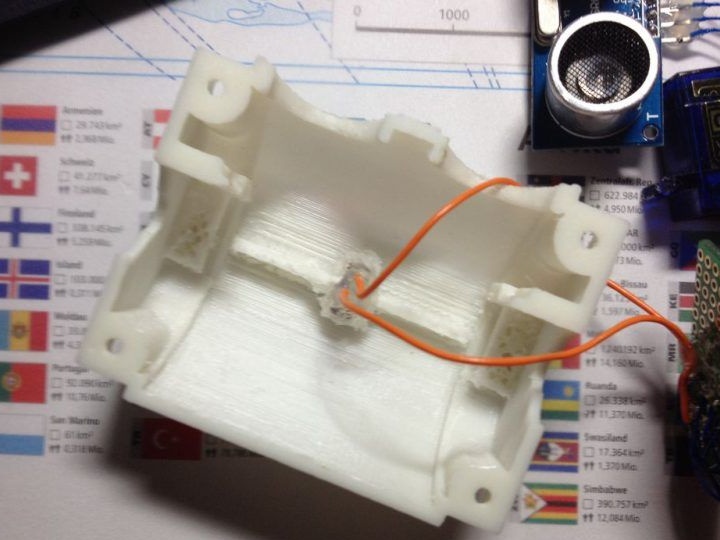
- 3D-dele (muligt). Det tager en top (top.stl), en bund (bottom.stl) og to hjul (wheel.stl).
Selvfølgelig er loddeedskaber, varm lim, skruetrækkere, skruer, ledninger og andre små ting nødvendige.

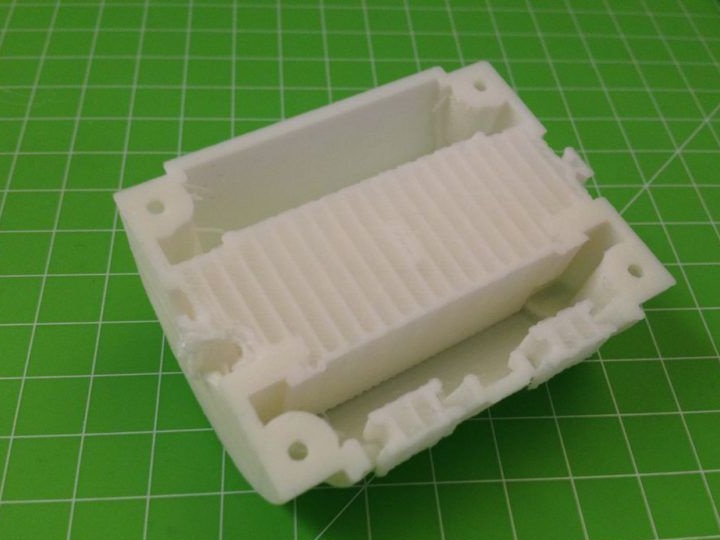
De øverste og nederste dele skal udskrives fladt med siden ved hjælp af indstillingen "understøttelsesstrukturer". Afhængig af hvilken type printer der blev brugt, kan det være nødvendigt at rengøre færdige dele i slutningen.
Robotens fremstillingsproces:
Første trin. elektronisk del af roboten
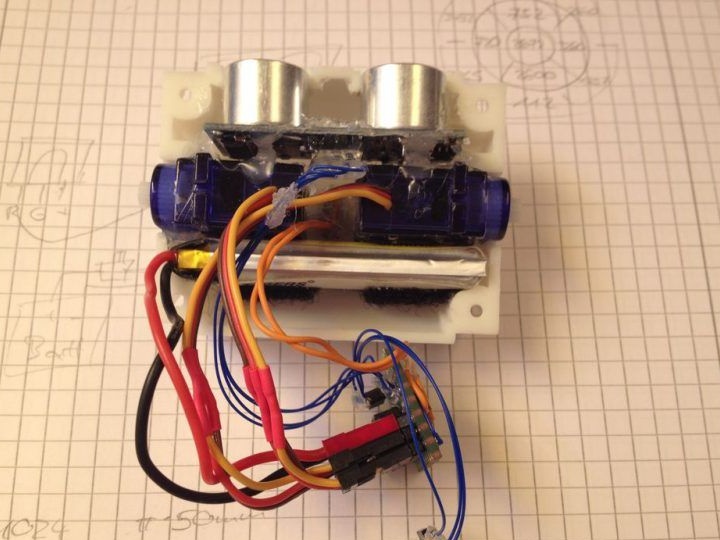
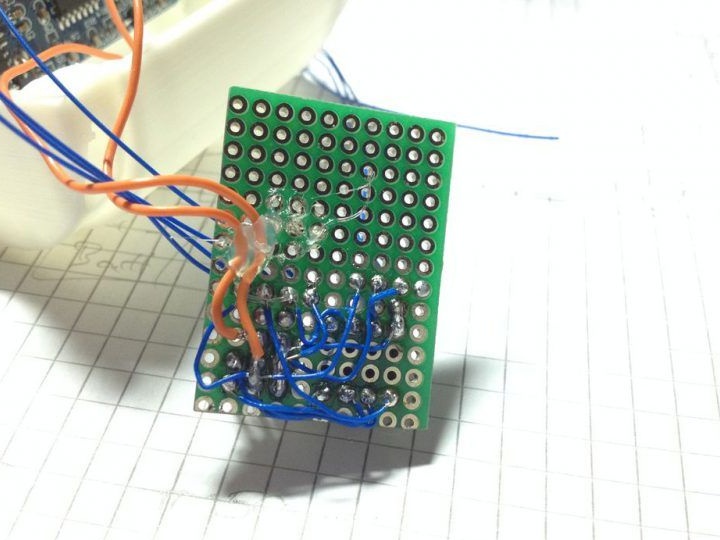
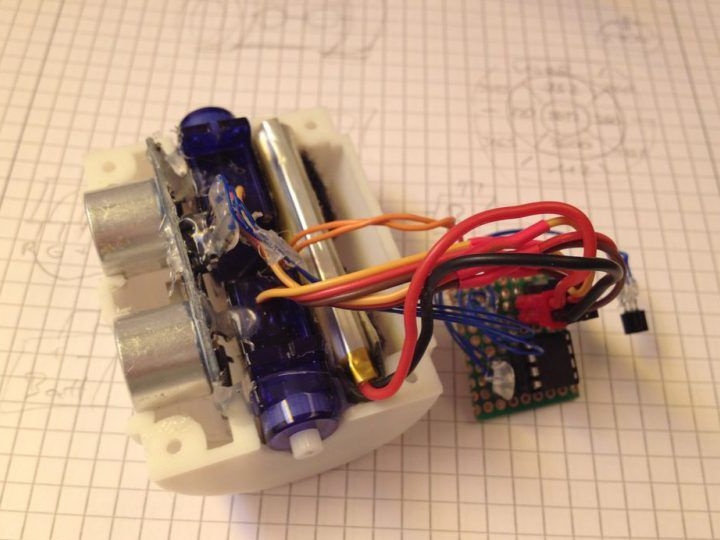
Først skal du konfigurere servoer, de skal konverteres til kontinuerlig rotation. Sådan gør du, der er mange instruktioner på Internettet. Nå, så skal alle elektroniske elementer samles som angivet i diagrammet. At samle den elektroniske del var praktisk, kan du tage et lille stykke brødbræt samt tynde ledninger.


Trin to Softwaredelen af roboten
Hvis du nærmer dig processen med at skabe en robot med den højeste professionalisme, kan softwaredelen skrives uafhængigt. Men for dette skal du lære et programmeringssprog. I en enklere version kan du downloade færdiglavet kode og blot uploade den til mikrokontrolleren.
Ifølge forfatteren er det bedst roboten modtager infrarøde signaler fra Sony brand fjernbetjeninger. I fremtiden vil det være nødvendigt at "refash" kodedelen Arduino og udsender dataene via Serial.print () -funktionen. Som et resultat vil det være muligt at finde ud af, hvilken kodning der er på hver knap.
Trin tre Den sidste fase. Saml roboten
Som konklusion går roboten. Til disse formål har du brug for varm lim. Med det skal du fikse ledningerne, så de ikke kommer af, når roboten bevæger sig.Det er også nødvendigt at fastgøre kontakten og fikse ultralydssensoren godt. Afslutningsvis forbindes robotens dæksler ved hjælp af fire skruer, som et resultat, hvis det er nødvendigt, det let kan demonteres. I øvrigt er skruer til servoer perfekte til montering.

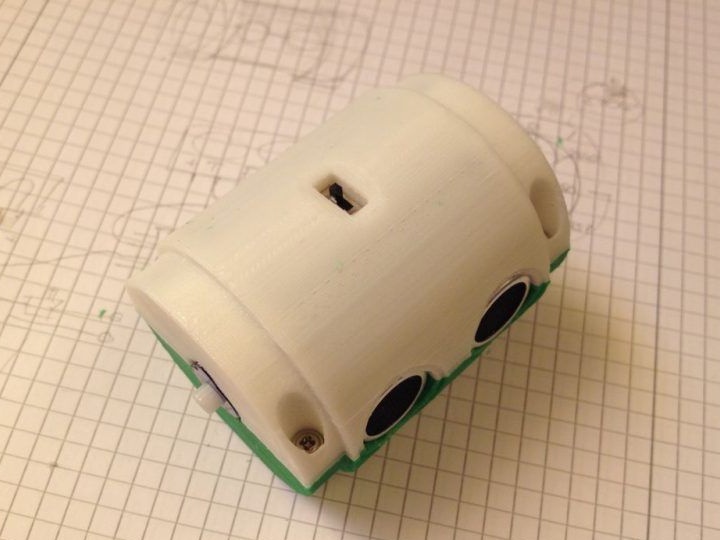
Det er alt, nu er roboten næsten klar. Det gjenstår at installere hjulene på servomotorakslerne, og du kan begynde at teste robotten. Du kan se mere detaljeret, hvordan hjemmelavet arbejde på videoen.