

I videoen kan du se, hvordan roboten fungerer. Det skifter gradvist farve under drift.

Materialer og værktøjer til montering af roboten:
- U-formede monteringsbeslag;
- fire 1,5V LR44-batterier hver;
- RGB-LED med flere farver med koblingsfunktion;
- isolerende rør;
- stålpinden;
- lavspændingsmotortype RF-300CA;
- knap for at tænde roboten (med to ledninger);
- ledninger til tilslutning af motoren
- blinkende alarm-LED.
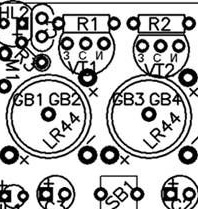

Med hensyn til det nødvendige elektronisk elementer, er de vist på figuren. Det trykte kredsløbskort er lavet af et folieplade af printplade, dets dimensioner er kun 30X30 mm Forfatteren anbefaler også brugen af små polære kondensatorer til samling.
Robotfremstillingsproces
Første trin. Skematisk diagram af roboten
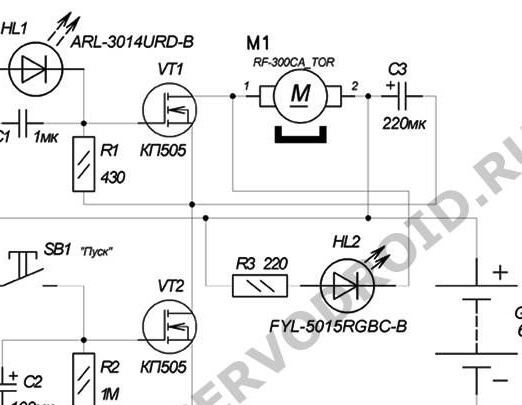
Robotkredsløbet kan ses på figuren. Efter isætning af batteriet er roboten i slukket tilstand, for at tænde for det, skal du trykke på SB1-knappen. Umiddelbart efter dette oplades kondensator C2 øjeblikkeligt. Den positive plade fra kondensatoren er forbundet med porten til felteffekttransistoren VT2. I denne henseende, når skiftetærsklen er nået, falder modstanden for drænkildekanalen i denne kanal øjeblikkeligt, og der dannes en negativ potentiel ladning ved drænet. Det, der sker dernæst, kan ses mere detaljeret i diagrammet.
Trin to Monter RGB LED
LED under nummer 1 er monteret på printkortet. På tegningen kaldes denne position HL2. Når LED er installeret, skal dens konklusioner bøjes, så LED'en ledes til siden. Under drift vil lysdioden ikke skinne op, men til siden og belyse væggene. I hvilken retning lyset vil skinne markeres med en sort pil.

Trin tre Monter batteri monteringsbeslag
For at skabe kontakt mellem batteriet og roboten bruges trykstifter.Den ene knap er installeret i midten, i diagrammet er den markeret som GB1, GB2, og den anden er indstillet til position GB3, GB4. For at fikse kontakterne sikkert loddes knapperne med en stor mængde lodde.


Batterier er installeret på metalknappen under nummer 3. Batterierne er fastgjort med en U-formet fastgørelse, hvorpå isolatorer fra rør bæres. Den øverste del af beslaget skal bøjes let med en bue nedad, hvilket gør det muligt at trykke på batterierne til den nedre kontakt. Isolerende rør er nødvendige, så batteriernes lodrette flader ikke kommer i kontakt med vandrette.
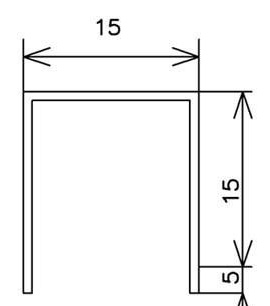
For at fremstille en U-formet fastgørelse skal du bruge to papirclips. De skal bøjes til en U-form, som angivet på tegningen. Alle rør kan bruges, her anvendes polyvinylchlorid. Deres højde skal være lig med batteriets højde.
Installer beslaget ved lodning, for dette skal du tin dens ender. Til fortynding er det nødvendigt at bruge en neutral, ikke-vaskende flux.
Trin fire Installer motoren
Motoren er installeret på den side af pladen, hvor sporene passerer, den er placeret med akslen nede. For at fastgøre motoren kan du bruge varmt lim eller dobbeltsidet tape. Men inden du monterer tæt på motoren, skal du tilslutte den og kontrollere hele systemet for driftsevne.

Trin Fem Opsætning og test hjemmelavet
Efter montering af roboten kan du teste og konfigurere. For at gøre dette skal du installere batterier i roboten, de er installeret i stedet for GB1, GB2 og GB3, GB4. I dette tilfælde skal elektronikken være i slukket tilstand. Efter installation af batterier kan roboten tændes, dette gøres ved hjælp af knappen SB1. Efter at have trykket på den, skal motoren begynde at arbejde, HL1-LED'en blinker, og RGB-LED'en tændes også.
Efter et stykke tid slukkes roboten automatisk, den stopper, og alle dioder slukkes. Derefter tændes den på samme måde som for første gang ved at trykke på en knap.

For at justere robotens tid skal du eksperimentere med værdierne for modstand R2 og kondensator C2, de er ansvarlige for denne funktion. Hvis du skal indstille robotens maksimale betjening, skal kondensatorens kapacitet være så stor som muligt. På en så enkel måde kan du samle en så interessant robot.