
Det særlige ved BIBOT-1-robotten er, at den kan udføre to opgaver. Det kan bevæge sig bag en lyskilde eller langs en sort linje, der kan tegnes på papir. Robotten meget fleksibel i indstillinger, det vil sige, senere vil det være muligt at justere det til de ønskede forhold, det vil sige for at gøre det mere følsomt over for lys eller mindre. Det er også muligt at justere motorernes rotationshastighed, dette gør det muligt for roboten at arbejde bedre, især når man bevæger sig langs linjen.

Enheden og robotens princip:
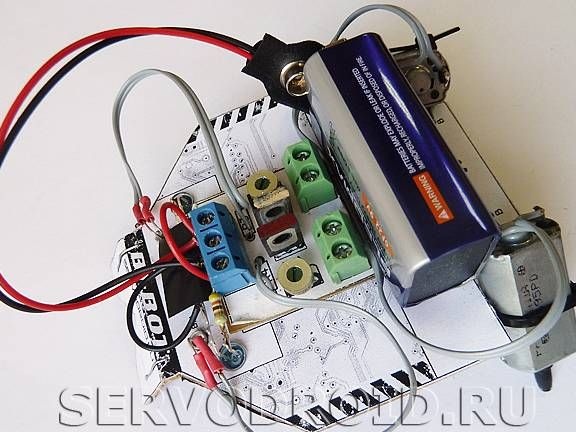
Robotens bund er lavet af pap, mens skabelonen udskrives på printeren og derefter går ned. Med hensyn til radiokomponentmodulet blev tekstolit taget som basis, modulet er fastgjort til robotens bund. For at gøre kroppen stiver anvendes der specielle ribben i designet.
Motorer er installeret som i de fleste af disse DIY, det vil sige i en vinkel. På grund af dette er det ikke nødvendigt at sætte hjul og gearkasse. For at forhindre, at akslerne glider over overfladen, sættes beskyttere på dem.
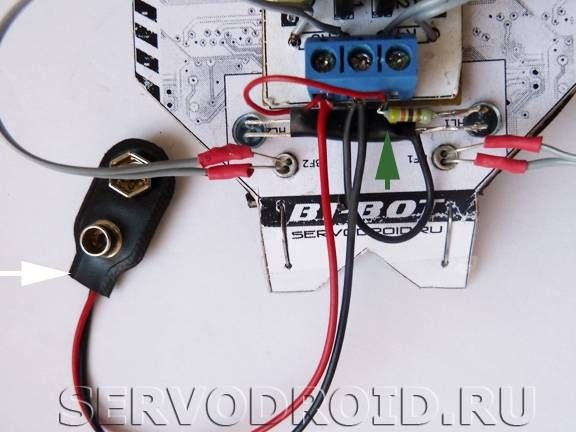
Et 9V type 6F22 batteri bruges som strømkilde. Batteriet er forbundet med tape og er altid tilgængeligt for nem udskiftning.
Hvad angår kontakten, så biler besluttede at undgå at installere det. Robotten tænder og slukkes ved at manipulere klipset, der fastgøres til batteriet.
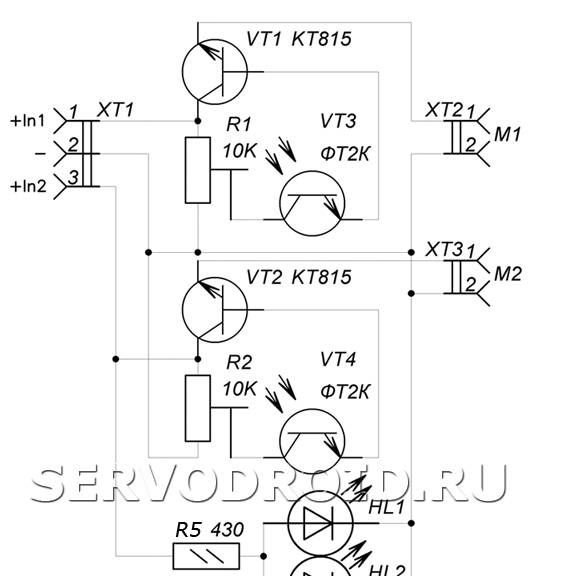
Og endelig justeringen af roboten. For at justere robotens følsomhed har systemet to justeringsmodstande. Når de roterer, kan du justere robotens følsomhed til lys, og du kan også justere motorernes rotationshastighed. Jo mere følsom robotten er for lys, jo hurtigere vil den bevæge sig, og vice versa.
Hvad angår driftsprincippet, er alt beskrevet i diagrammet.
Materialer og værktøjer:
- 9V batteri og klip til tilslutning;
- to stik til tilslutning af motorer (klemmeblokke med to sektioner);
- motorer;
- nylon afretning
- beskytter (gummirulle);
- to fototransistorer;
- to infrarøde LED'er;
- en beslag fra en hæftemaskine;
- Tre sektions terminalblok til strømforsyningstilslutning;
- indstillingsmodstand.

Fremstillingsproces:
Første trin. PCB-design
Gebyret oprettes ved hjælp af LUT-metoden. Før arbejde skal glasfiberoverfladen rengøres grundigt og derefter vaskes og tørres grundigt. Efter fremstilling skal de ledende spor kontrolleres med et multimeter for en kortslutning.
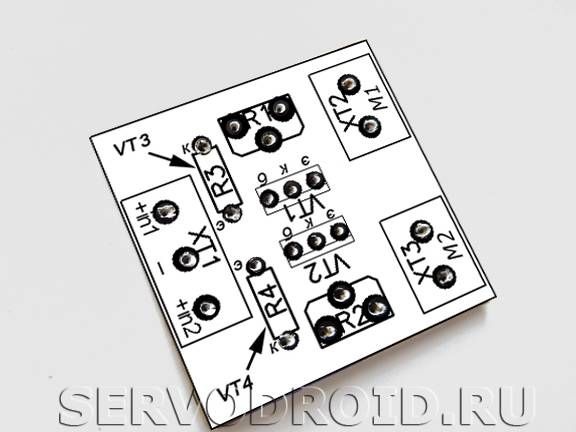
Trin to installation elektronisk element
Dernæst skal du tage en tegning, der er trykt på papir og sætte den på det oprettede bord. I dette tilfælde skal hullerne på papiret og i printpladen nøjagtigt stemme overens. Derefter installeres radiokomponenterne som angivet i diagrammet. I arbejdsprocessen skal installationen af modstande R3, R4 installere fototransistorer VT3, VT4.
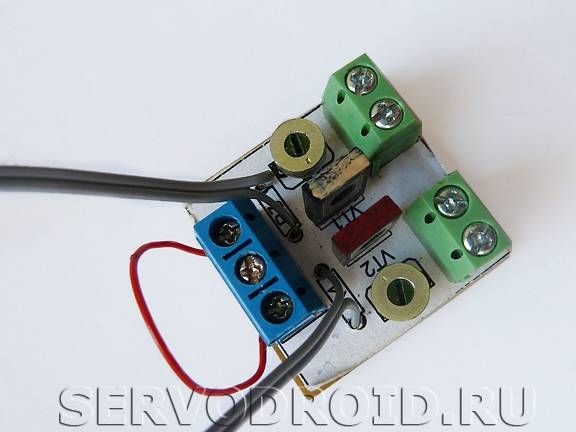
De ekstreme sektioner af den tredelte terminalblok XT1 skal forbindes med en monteringsledning. Kontakternes forbindelsespunkter skal være godt isoleret, det er bedst at bruge et varmekrympeslange til disse formål.
Trin tre Sådan opretter du en sag
En tegning af kroppen skal udskrives på et almindeligt ark A4-papir. Derefter skal du tage et stykke bølgepap og sætte en tegning på, derefter skal sagen klippes rundt om omkredsen.
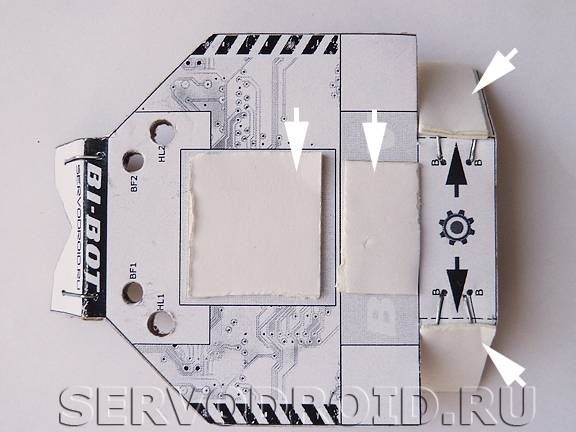
Hvor "saks" -piktogrammet er placeret langs dristige linjer, skal der udskæres. Derefter skal du langs de sorte stiplede linjer bøje papen som på billedet og sætte de sorte pile.



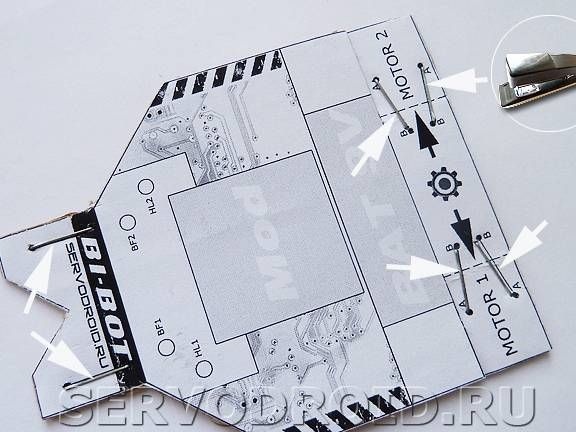


Foran og bag på huset til den specificerede position ved hjælp af en hæftemaskine. Du skal installere konsollerne. Steder for deres installation er markeret med sorte streger med cirkler. Hæfteklammer er nødvendige for at gøre rammen stivere. Efter montering af beslagene er de trætte at bøje sig langs foldelinierne.
På de steder, der er markeret BF1, BF2, skal du lave huller til installation af fototransistorer. På steder HL1, HL2 skal du lave huller i en sådan størrelse, at de passer til diameteren på kabinettet til infrarøde lysdioder.
På de steder, der er betegnet som Mod "," BAT 9V "og" MOTOR 1 "," MOTOR 2 "klæber strimlerne af dobbeltsidet bånd.
Trin fire Installation af motorer
Motorer monteres i position med nylonbånd. For at forhindre, at aksler glider, skal de bæres med beskyttere. De er lavet af gummibånd, der er i heliumstængerne i kuglepenne. På samme trin loddes ledningerne til motorerne.


Trin Fem Installation af infrarøde LED'er
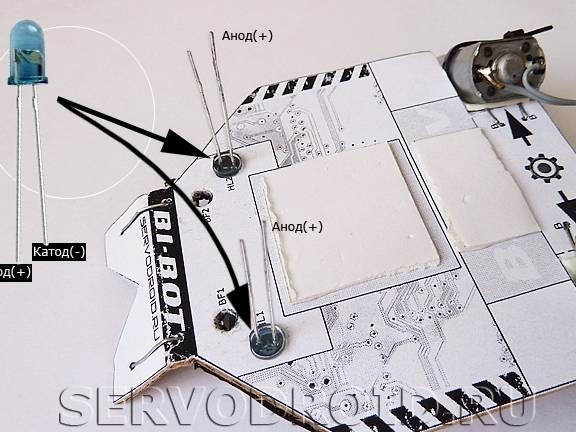
Når du installerer infrarøde LED'er, er det vigtigt ikke at forveksle deres konklusioner, for importerede elementer er en lang kontakt en anode, det vil sige et plus. Lysdioder er installeret i positionerne HL1, HL2 som vist på billedet. Resultaterne er bøjede, så dioderne kan forbindes parallelt.
En 430 ohm-modstand skal loddes til den positive kontakt fra LED'erne og en sort ledning til den negative kontakt.
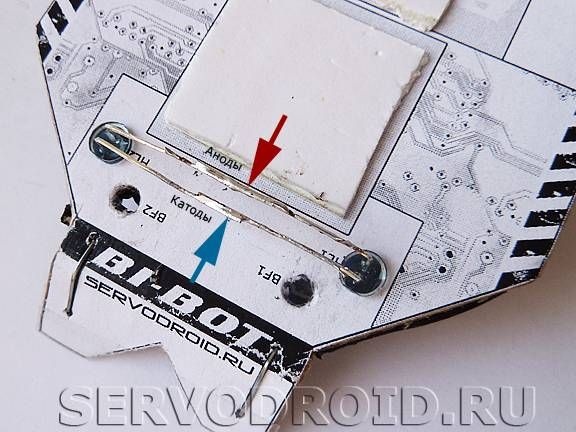
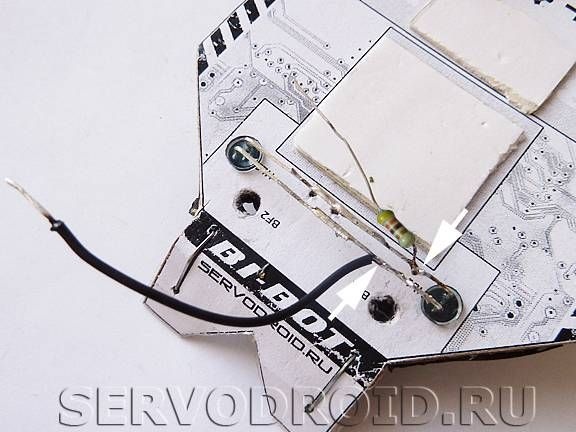
Den anden ende af den sorte ledning skal tilsluttes midtstiften på en tredelt sektion. Hvad angår udgangen fra modstanden, er den forbundet til klemmen til klemmen.
Trin seks Endelig opbygningsfase
For at roboten skal bevæge sig langs linjen, sættes fototransistorer på plads BF1, BF2 som på billedet.
Transistorer til bevægelse bag lyskilden er placeret på bagsiden.
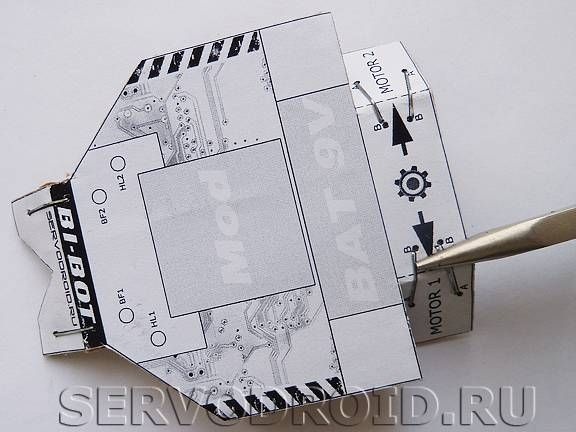
Afslutningsvis er motorerne tilsluttet, og batteriet sættes.


Det er alt, roboten er klar. Nu kan du prøve at tænde den og konfigurere den til de ønskede forhold.