

Pultoider kaldes sådanne robotter, der kan styres fjernt ved hjælp af fjernbetjeningen. For eksempel kan en tv-fjernbetjening bruges til disse formål. Den vigtigste opgave, som forfatteren satte sig i fremstillingen af en sådan robot, er enkelheden i dens samling. under revision roboten kræver ikke fremstilling af et printkort, installationen er meget enkel og sker bare på pap.

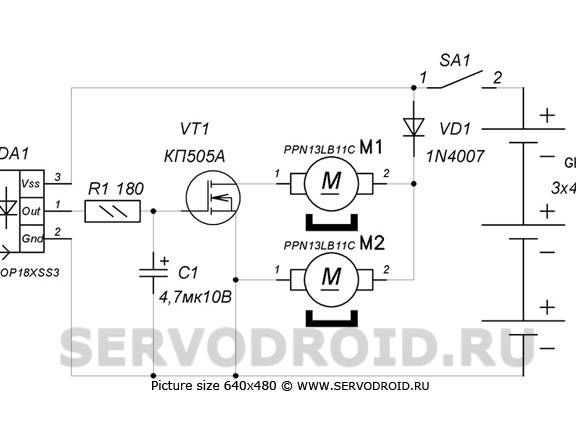
elektronisk Robotkredsløbet består kun af fire komponenter: en diode, en transistor, en fotodetektor og en kondensator. Til fremstilling af den mekaniske del er der også behov for et minimum af materialer, for eksempel bruges en CD-ROM til at fremstille sagen.
En robot lavet på denne måde vil kun forstå et hold. Det er værd at trykke på en vilkårlig knap på kontrolpanelet, og roboten vil begynde at dreje. Hvis du fortsætter med at holde knappen nede, bliver rotationsvinklen større, som et resultat, at roboten kan dreje 360 grader.
Robot enhed
En kompakt disk bruges som grundlag for fremstilling af roboten. Hvad angår strømelementerne, er de fastgjort ved hjælp af M2-bolte. Det elektroniske kort, også batterirummet, monteres ved hjælp af bånd.
Hvad angår motorerne, er de placeret i en vinkel, og deres aksler hviler mod vejen. Det er således ikke nødvendigt at fremstille hjulene separat. Bolte fastgøres ved hjælp af rammer, der er lavet af en skolelinie.
Tre “lille finger” -batterier fodrer roboten, de er installeret i et specielt tilfælde. I alt producerer strømforsyningen 4,5 V.
Og endelig fotodetektoren, det er kun en her, det er en type TSOP. Den modtager modulerede signaler fra enhver fjernbetjening, som robotten kan styres til.
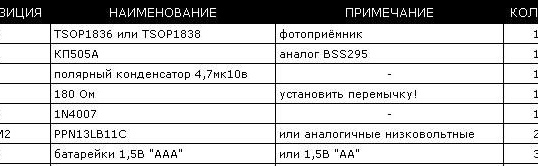
Materialer og værktøjer til fremstilling:
- nylonbånd;
- fotodetektor type TSOP1836;
- en felteffekttransistor (KP505A);
- en kompakt disk;
- fular til batterier i tre sektioner;
- tre "små" batterier;
- plast lineal;
- skruer til fastgørelse af rammen;
- ledninger og switch (cross over type).
Fremstillingsproces:
Første trin. PCB-design
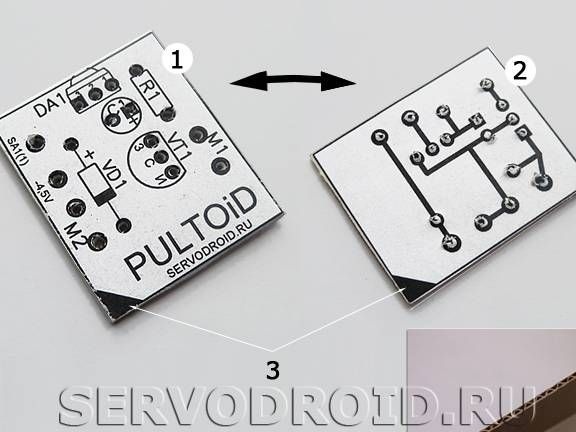
For at fremstille et printkort skal du først udskrive en tegning på papir. Du skal få to billeder, på den ene installationstegning og på den anden side af brættet. I alt vil brættet bestå af tre elementer, i midten vil der være en bølgepap limet med kontorpapir på begge sider. For at lime pladen anbefales det at bruge en tør limpind.
Trin to Installation af radiokomponenter
Når du installerer elektroniske komponenter, er det vigtigt ikke at glemme eller afskære de fremspringende kanter på kontakterne. Derefter bøjes de, og dermed oprettes et elektrisk kredsløb. Alle elementer forbindes ved lodning i henhold til det specificerede skema.
Modstand R1 i kredsløbet skal udskiftes med enhver jumper. Hvad angår fotodetektoren, vises den rigtige rækkefølge for dens forbindelse også på billedet.

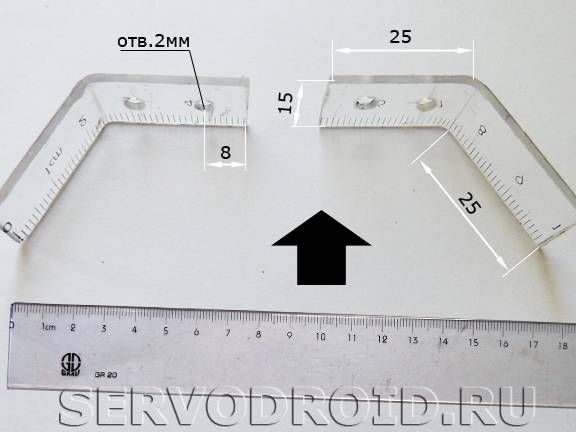
Trin tre Installation af strømramme
For at installere motorerne skal du oprette en strømramme. Som materiale bruges en plastisk lineal her. Det skal skæres i to dele og bøjes som angivet på billedet. For at få linealen til at begynde at bøjes, skal du bringe den varme loddejernspids til et sted med afbøjning i en afstand af ca. 2 mm. Også til disse formål kan du bruge en konstruktionshårtørrer. Linealen skal bøjes jævnt til en vinkel på ca. 30 grader.

Når rammen er oprettet, kan du fortsætte med dens installation. For at gøre dette, tag CD og 2 mm skruer med møtrikker. Endvidere bores huller med en diameter på mindst to millimeter de rigtige steder, og rammen er fastgjort med skruer. Så rammen ikke glider, inden du installerer den, skal du sætte dobbeltsidet bånd på disken.
Trin fire Installation af frontstøtten
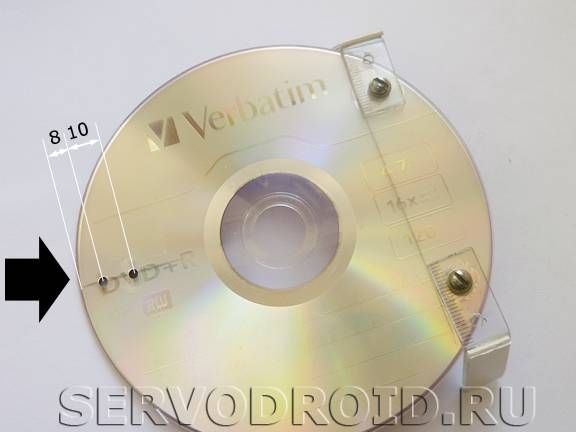
Foran på skiven skal du bore to huller og forberede en nylon-afretning. Størrelsesstørrelsen skal være 3x150mm. Det skal indsættes som angivet på billedet. Som et resultat afskrives den resulterende support perfekt under robottens drift og glider langs vejen.


Trin Fem Motorinstallation
For at forhindre, at motoraksler glider langs vejen, skal der monteres beskyttere på dem. De er lavet af tyggegummi, som kan findes på pastaer af heliumpenne. For at installere motorerne skal du først lime et stykke dobbeltsidet bånd på understøttelsen, det forhindrer glidning. Nå, så er motorerne endelig fastgjort med nylonbånd.

Trin seks Kontakt og strømforsyningstilslutning
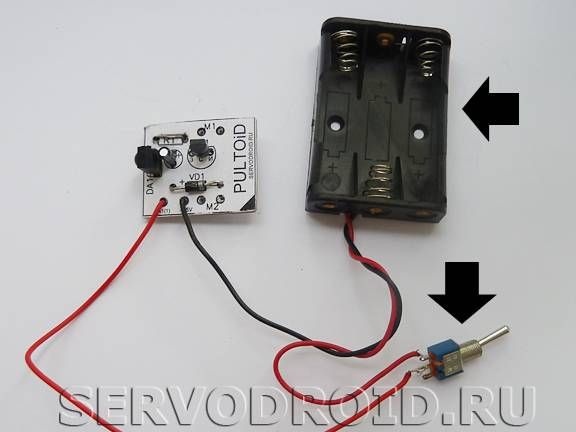
Som strømkilde kan du bruge ethvert batteri, hvis strøm ikke overstiger 5 volt. I dette tilfælde bruges en sag til tre fingerbatterier, som i alt 4,5 V
Hvad angår afbryderen, er den monteret på afstanden af den positive kontakt, der kommer fra strømkilden. Den røde ledning er fastgjort til brættet for at pin SA1 (1), og den sorte ledning til pin -4,5V.


På dette trin kan du også forbinde motorerne, deres ledninger er forbundet til kontakterne M1 og M2.
Syvende trin. Sidste etape
På det sidste trin skal alle elektroniske elementer rettes. De er knyttet til disken ved hjælp af dobbeltsidet bånd. Hvad angår afbryderen, skal den også rettes, for dette kan du bruge varm lim.

Det er alt, nu er roboten klar. Du kan prøve at tænde for den og give en kommando til at tænde ved hjælp af enhver fjernbetjening.