
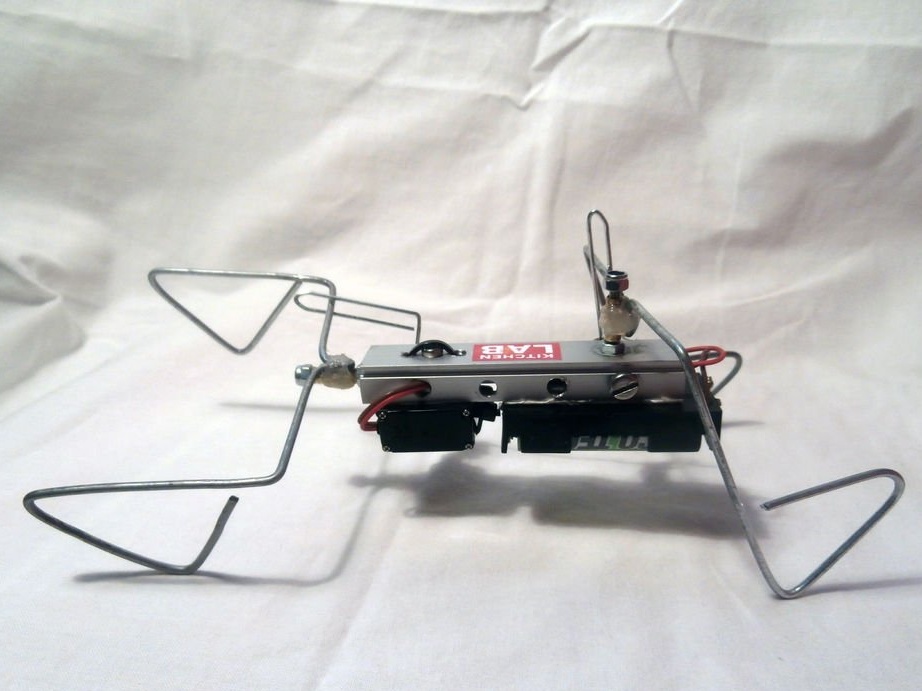
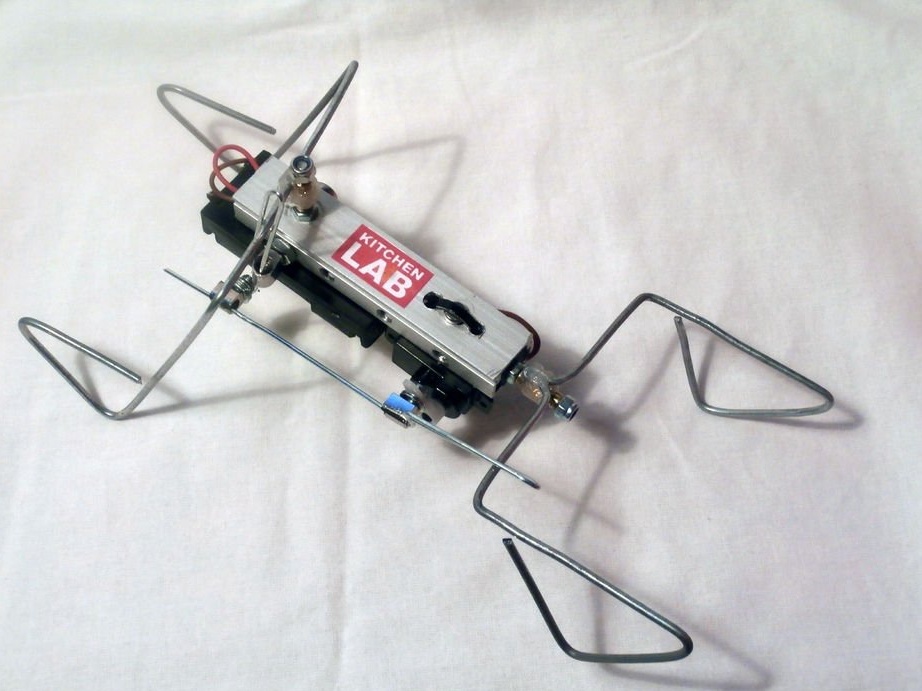
Hej alle sammen! Jeg blev inspireret til at oprette min BEAM-robot, efter at have set nok af disse enkeltmotorers og tomotors vidundere med robotik på Internettet. Ideen var at skabe en gårobot, gå på samme måde som 1- eller 2-motor BEAM-vandrere. Efter adskillige mislykkede eksperimenter gjorde jeg, hvad jeg ville!
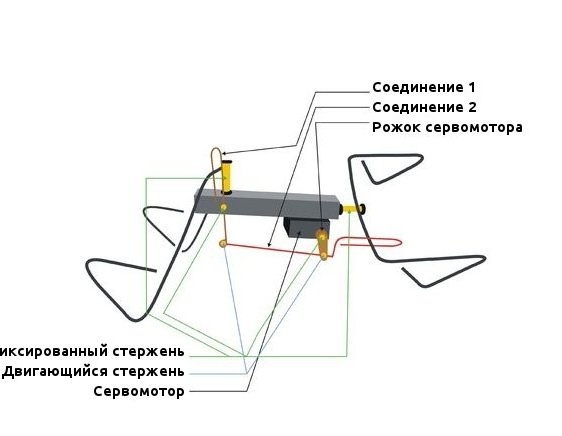
Trin 1: Mekanismen
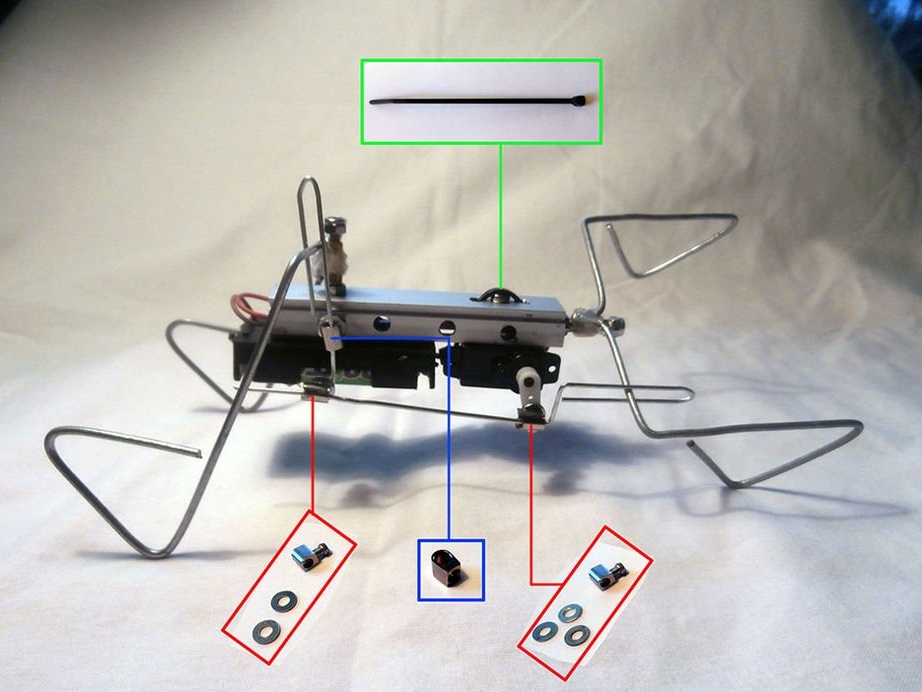
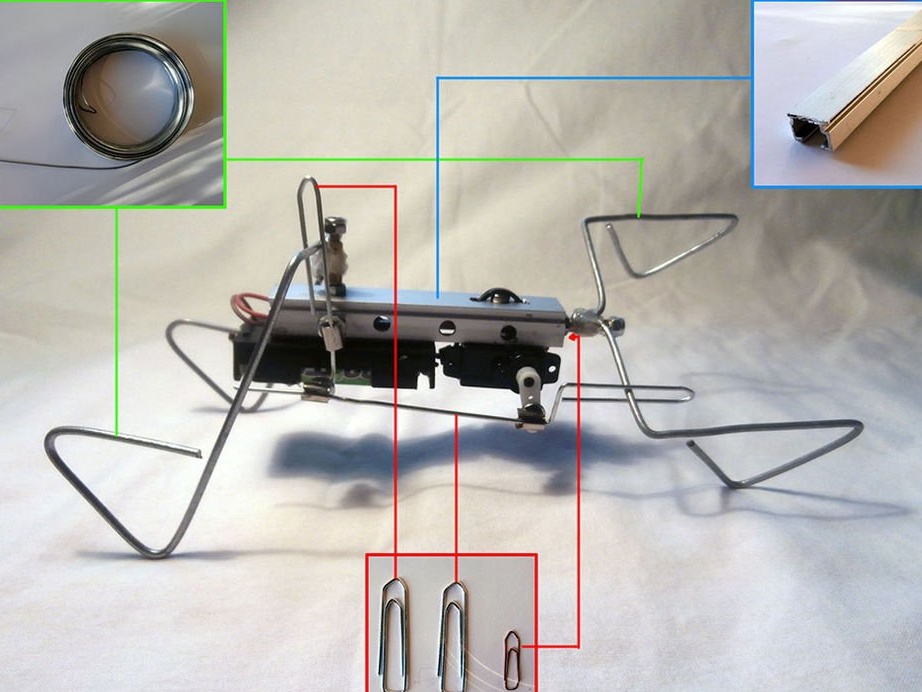
Trin 2: Nødvendige dele

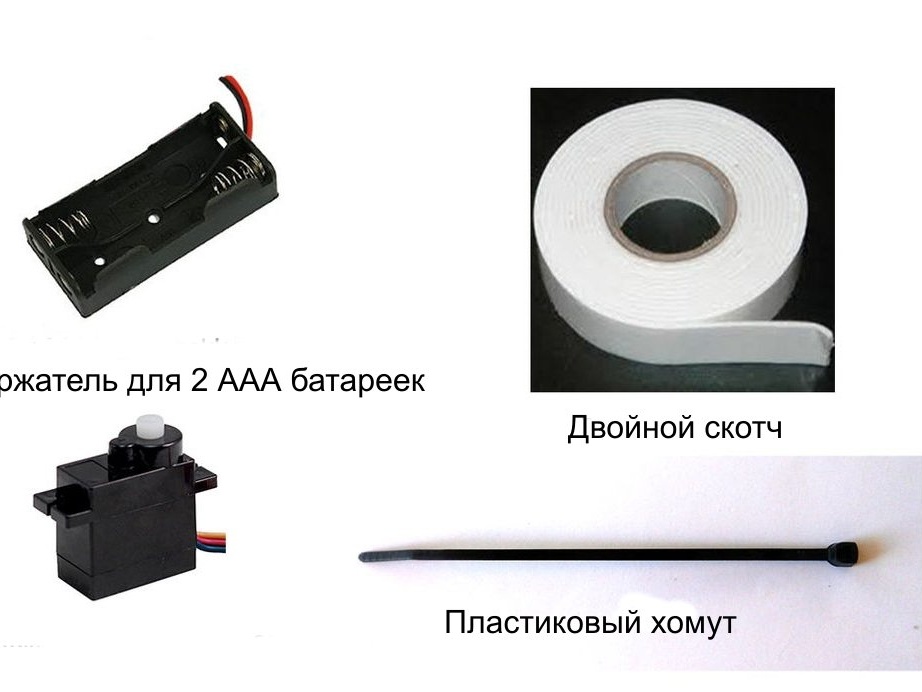



(1x) kontinuerlig rotationsservo
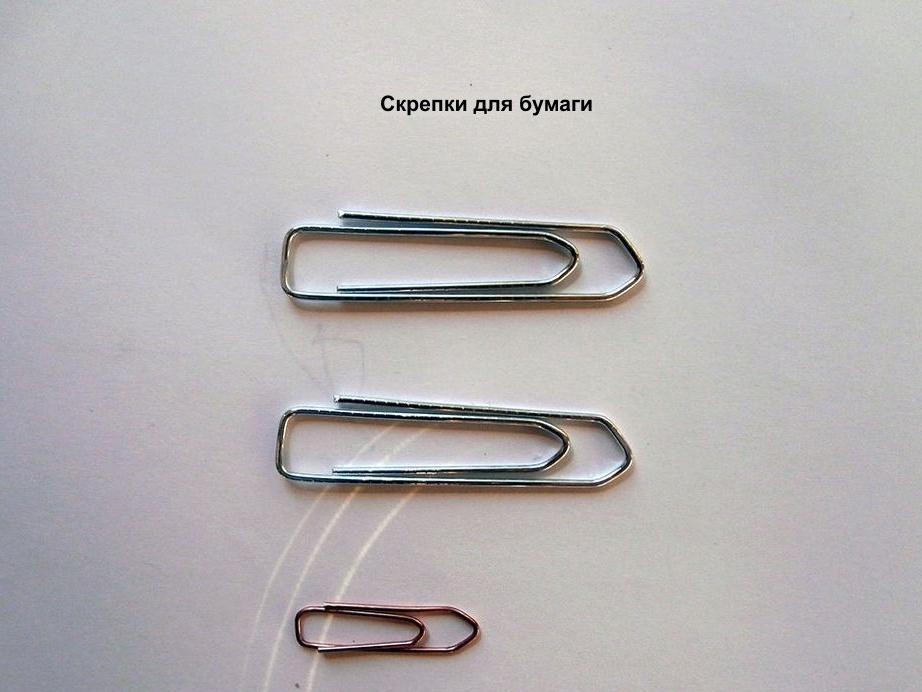
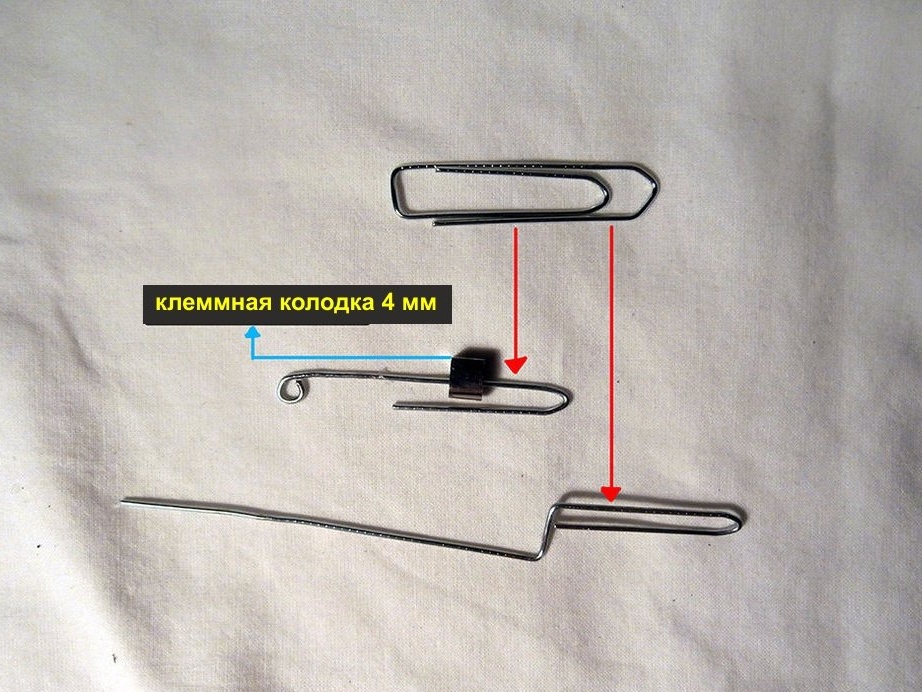
(2x) store papirclips
(1x) lille papirclips
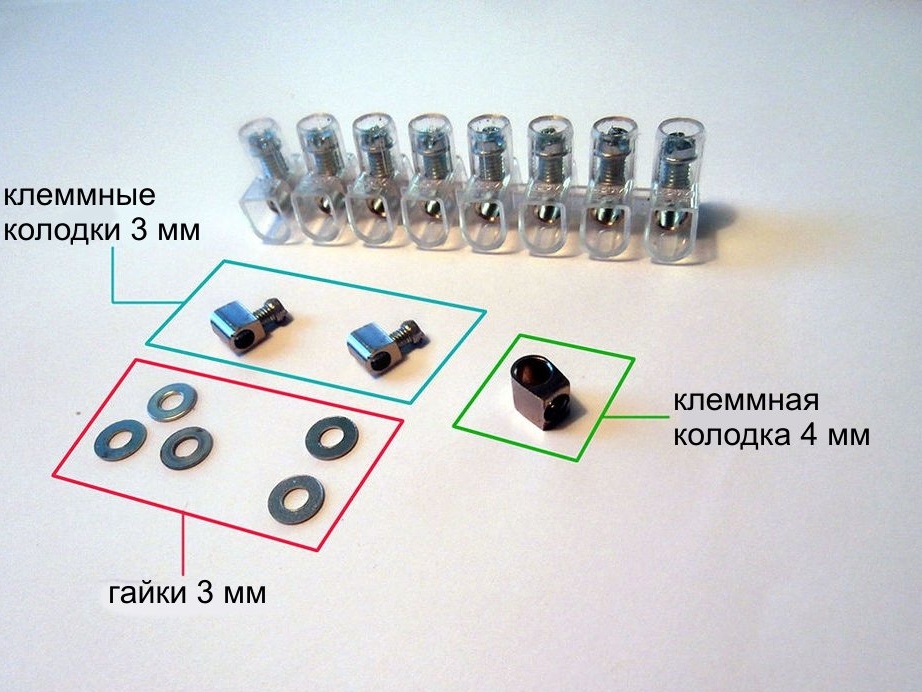
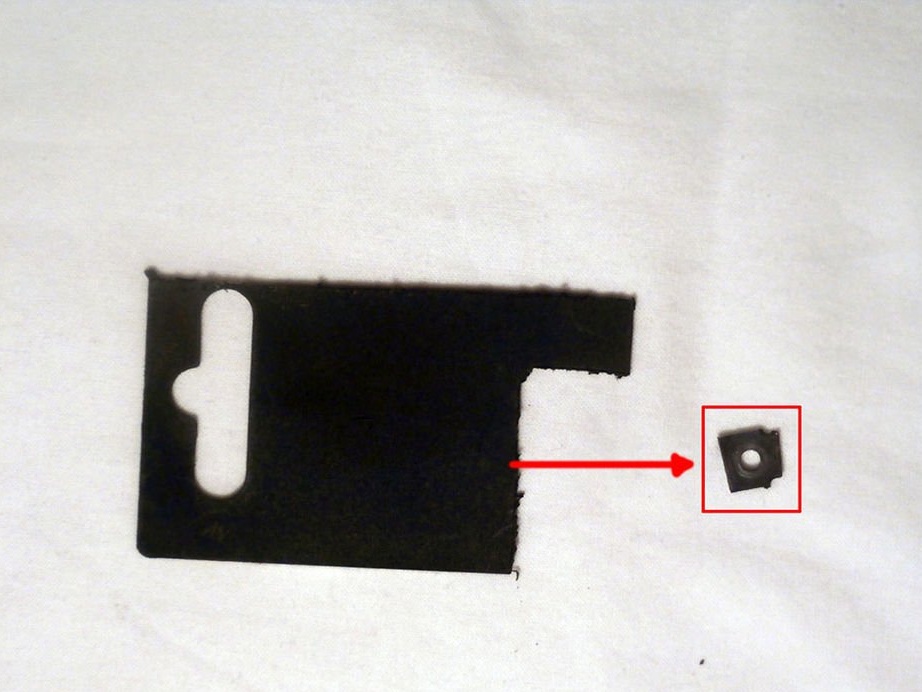
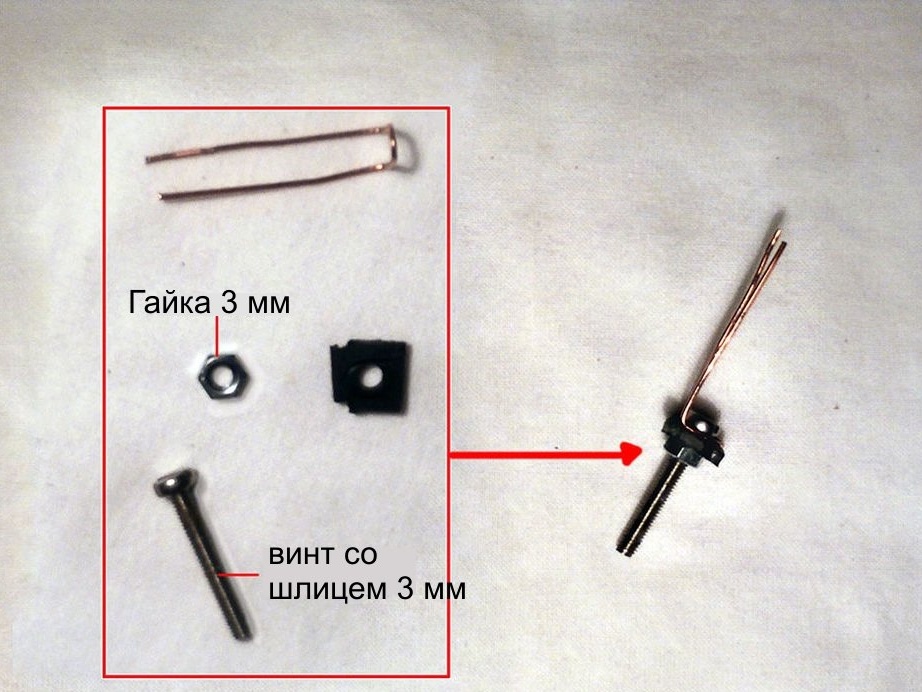
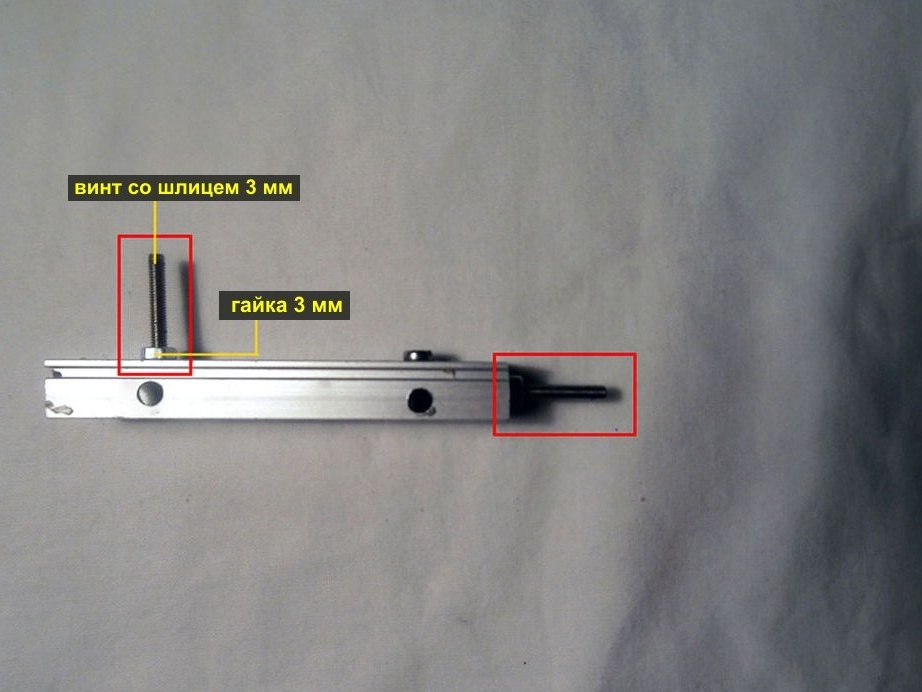
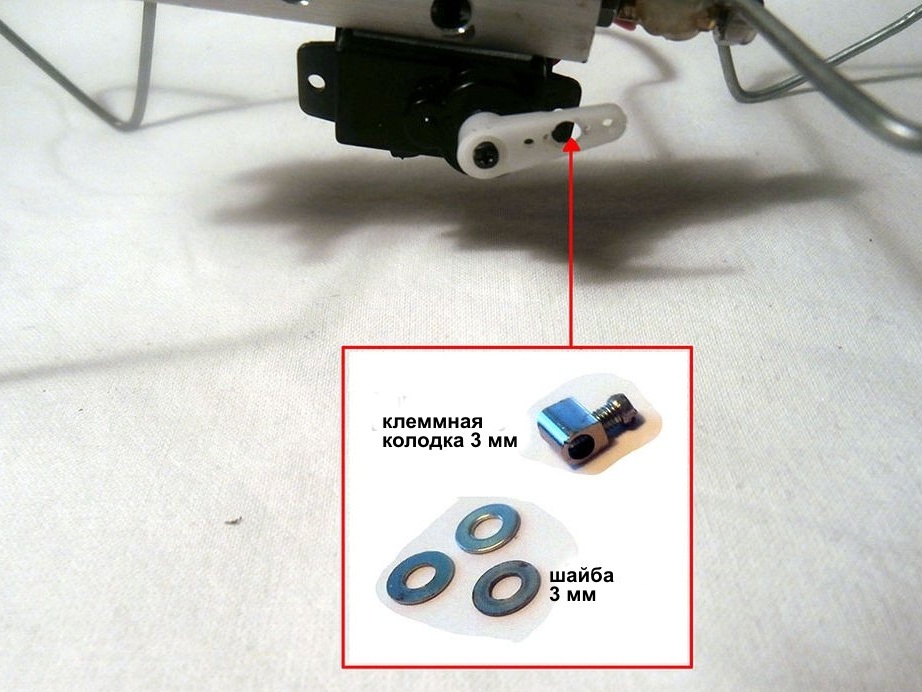
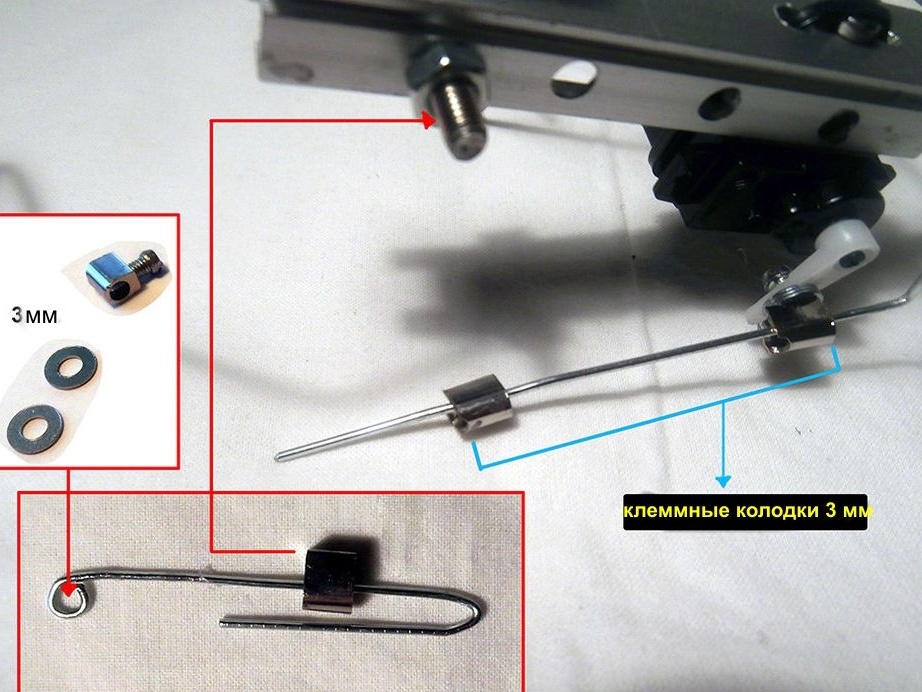
(2x) terminalblokke (3mm)
(1x) terminalblokke (4mm)
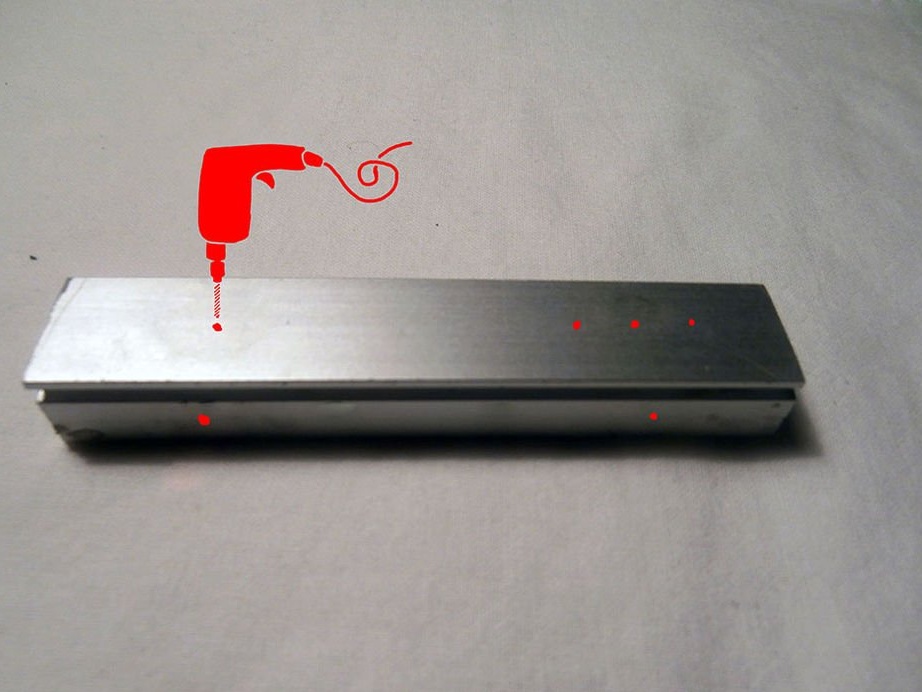
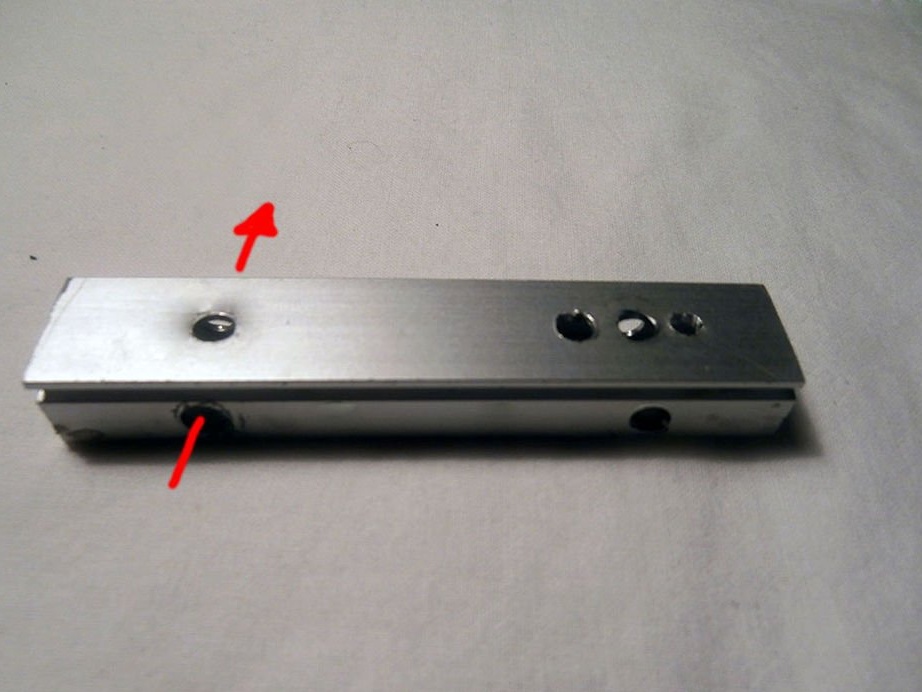
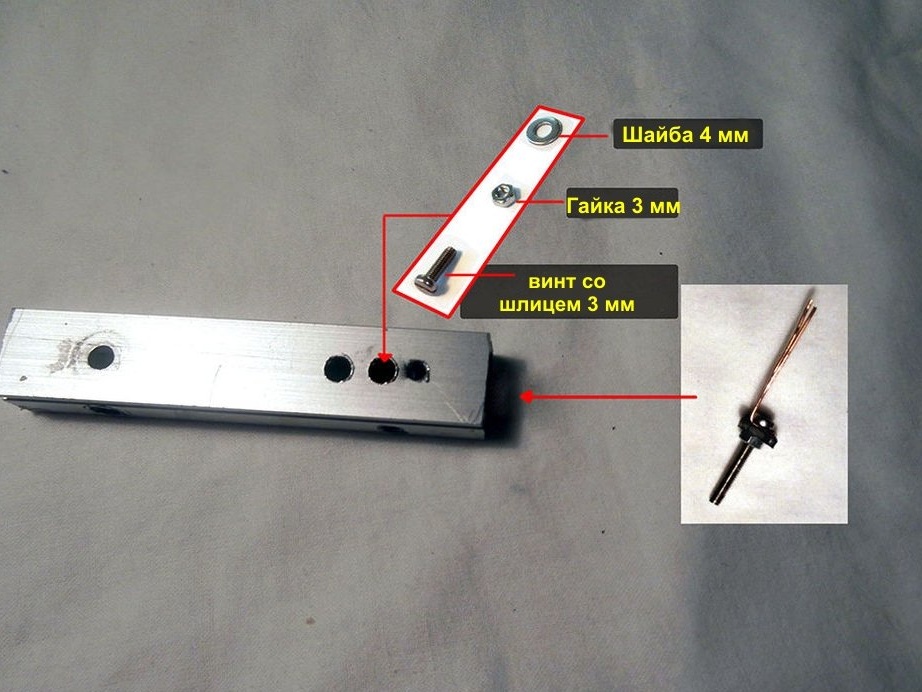
(1X) Brugt aluminiumsprofilblok
(1X) stykke plast
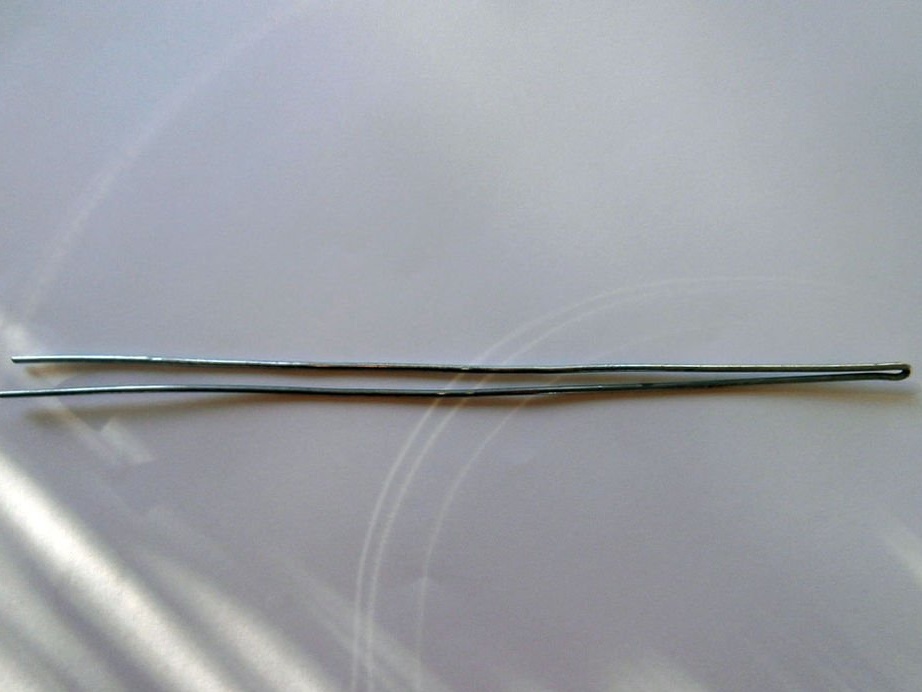
Ståltråd (2 mm)
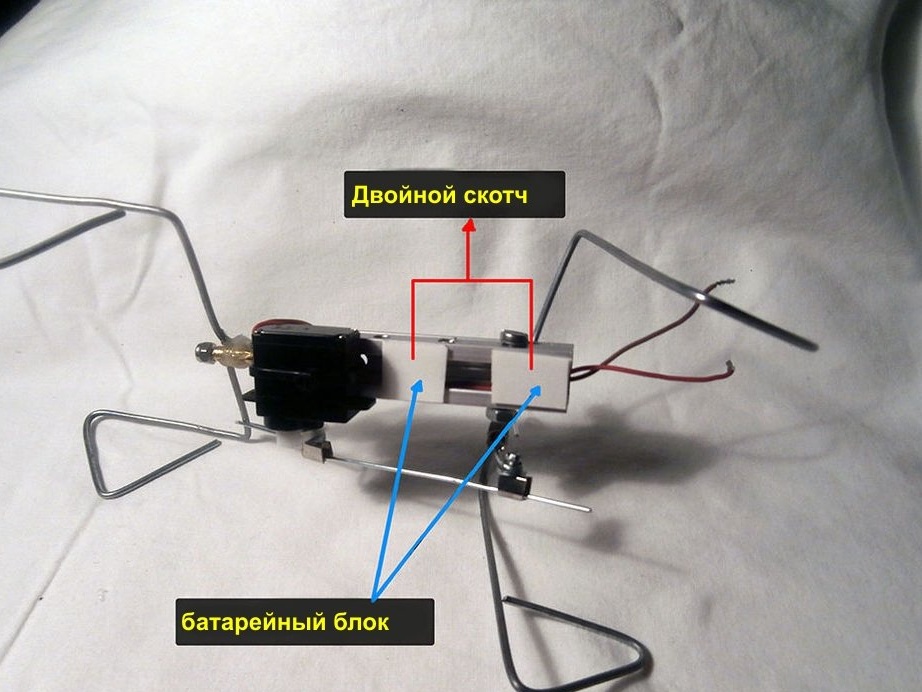
Dobbelt klæbebånd
Messingrør
(1X) lille klemme
(1X) batteripakke (2 x AAA)
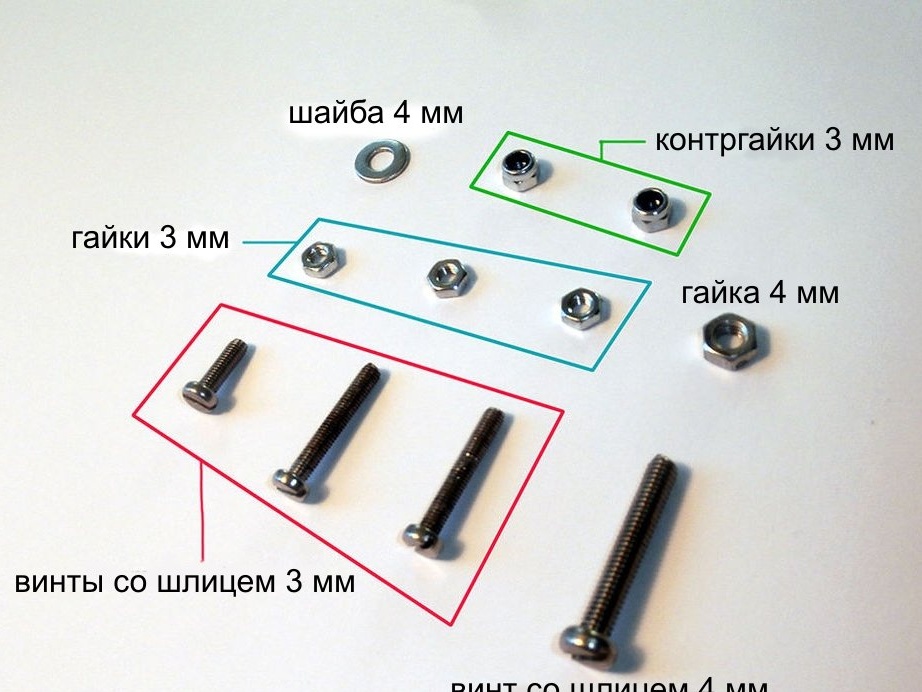
(2X) låsemøtrikker (3 mm)
(3X) møtrikker og skruer (3 mm)
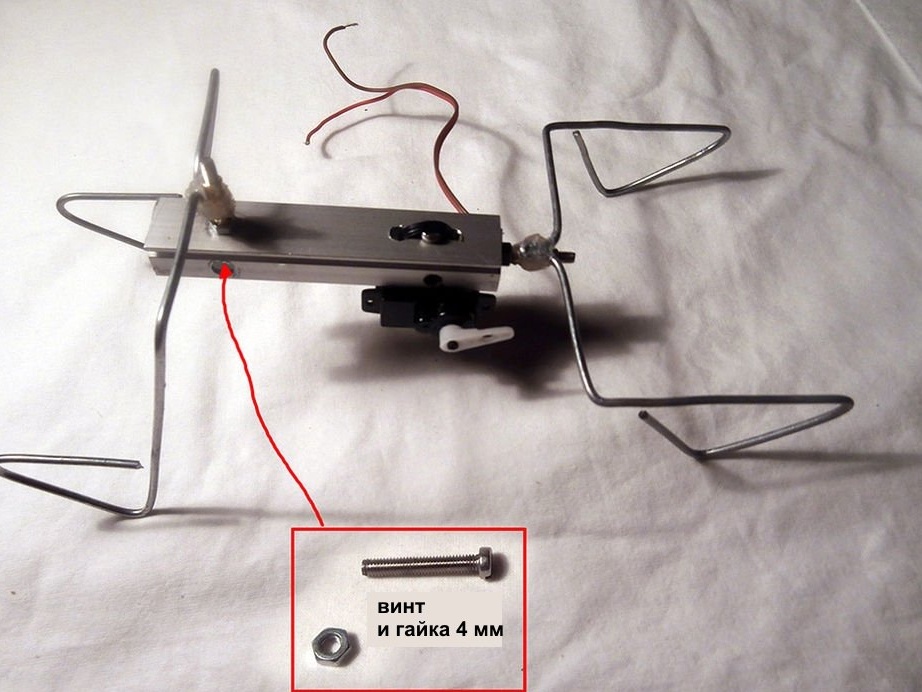
(1x) møtrikker og skruer (4 mm)
(5x) skive (3 mm)
(1X) skive (4 mm)
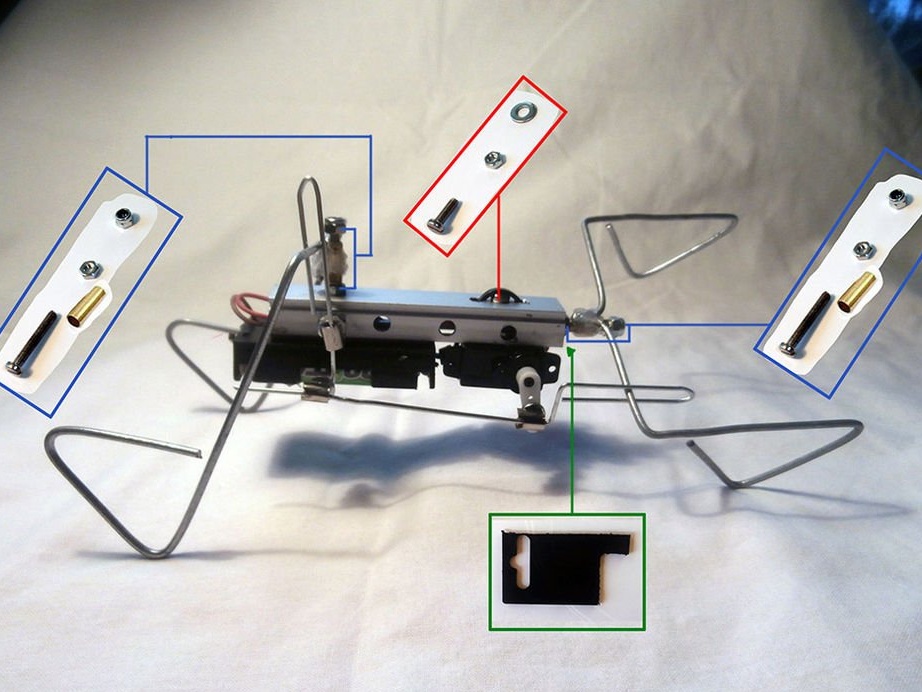
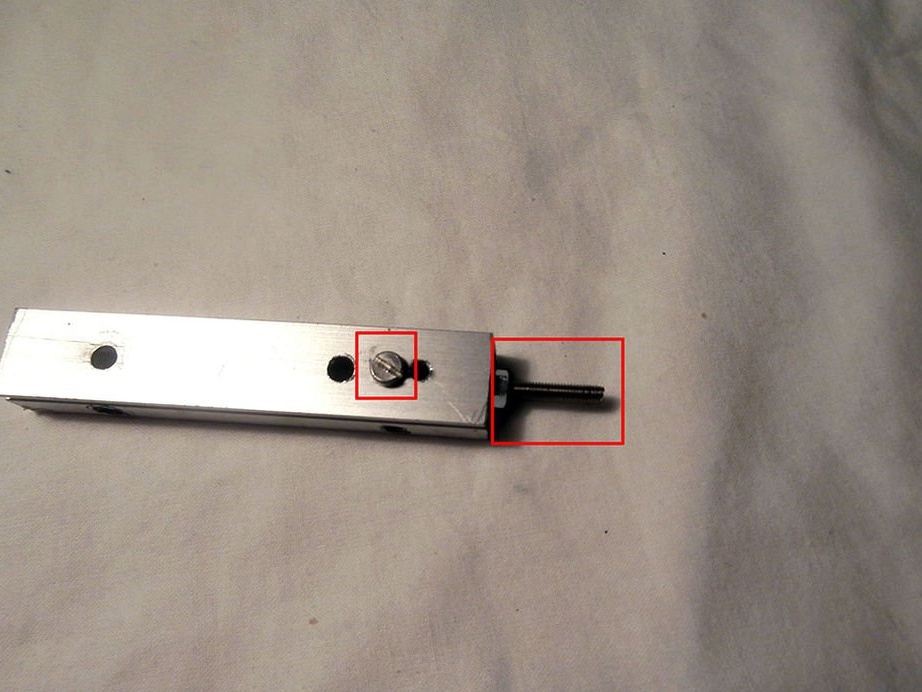
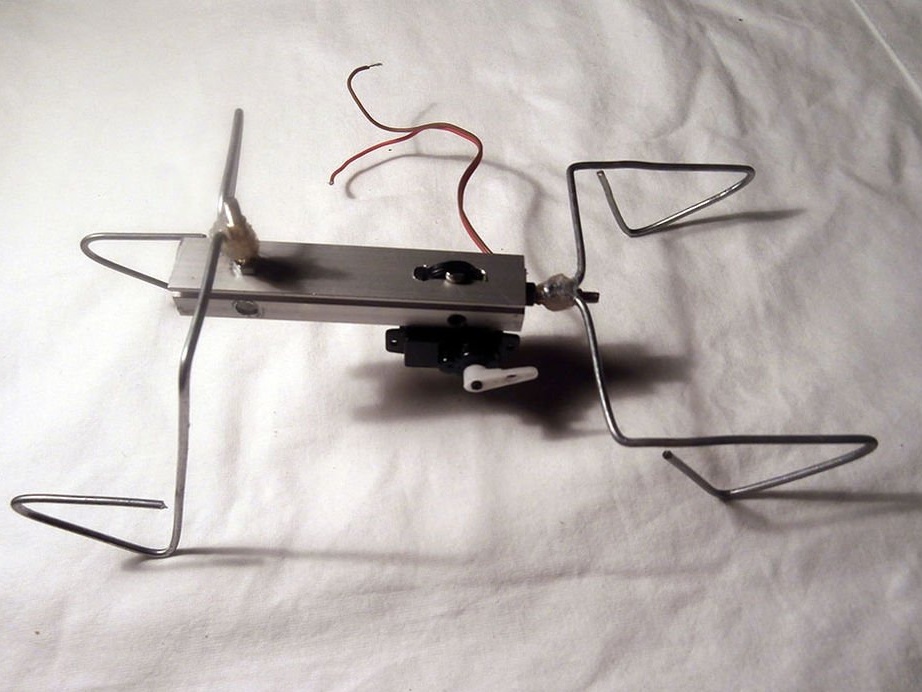
Trin 3: Montering af dele
Trin 4: Værktøjer
Trin 5: Boliger

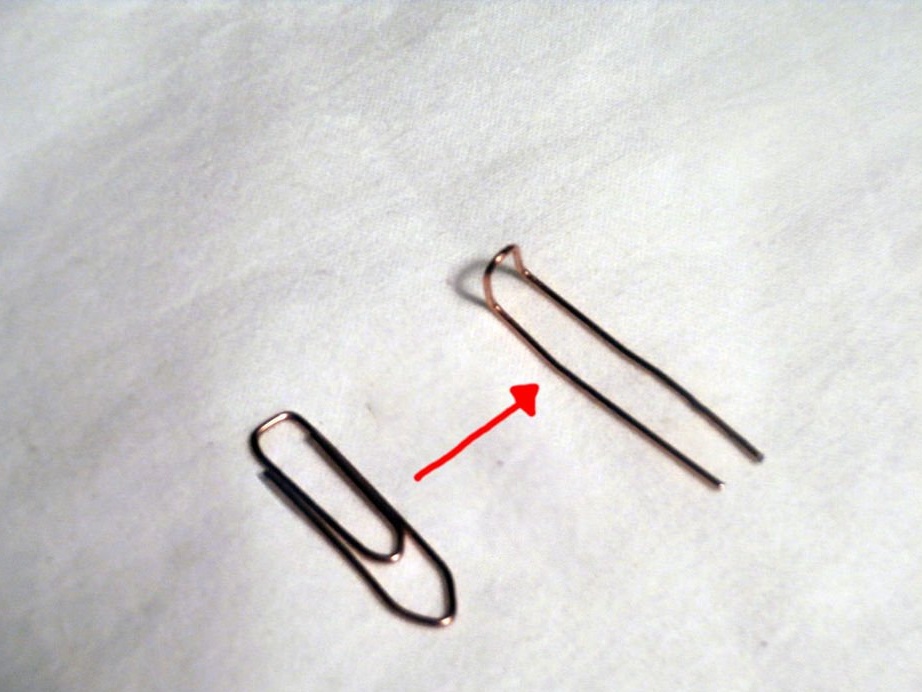

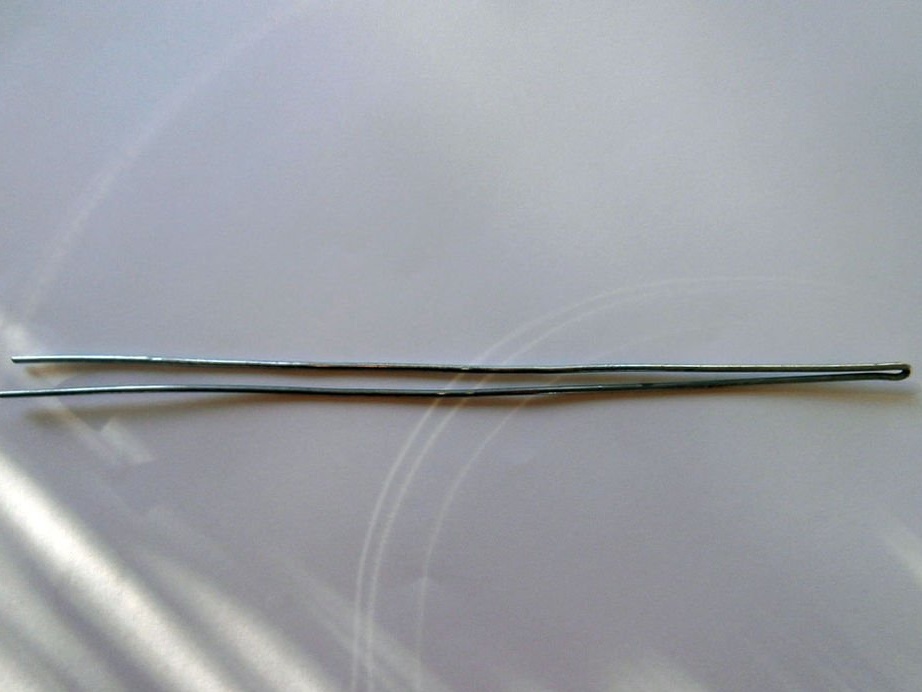
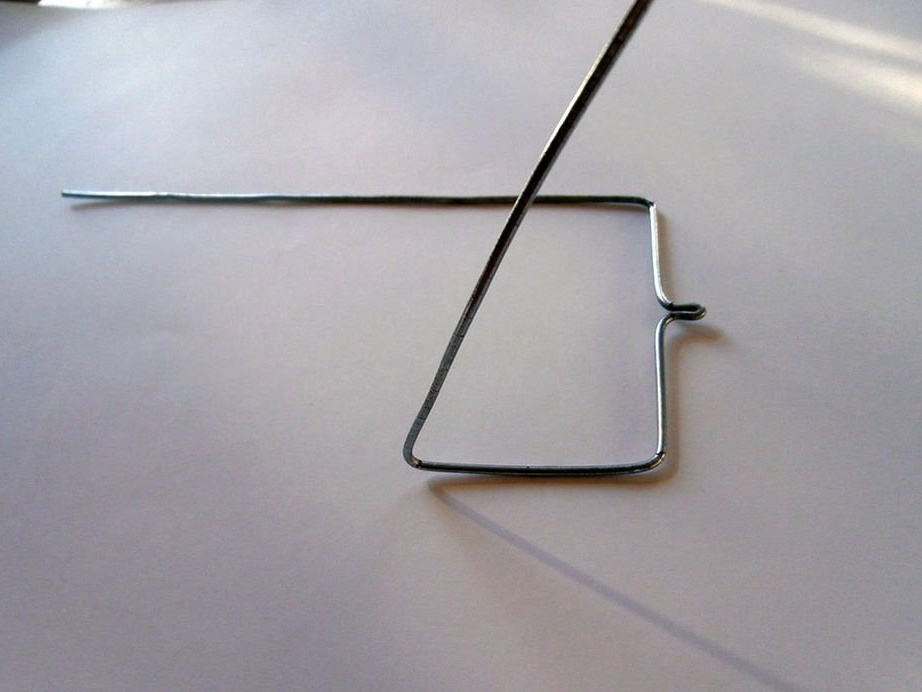
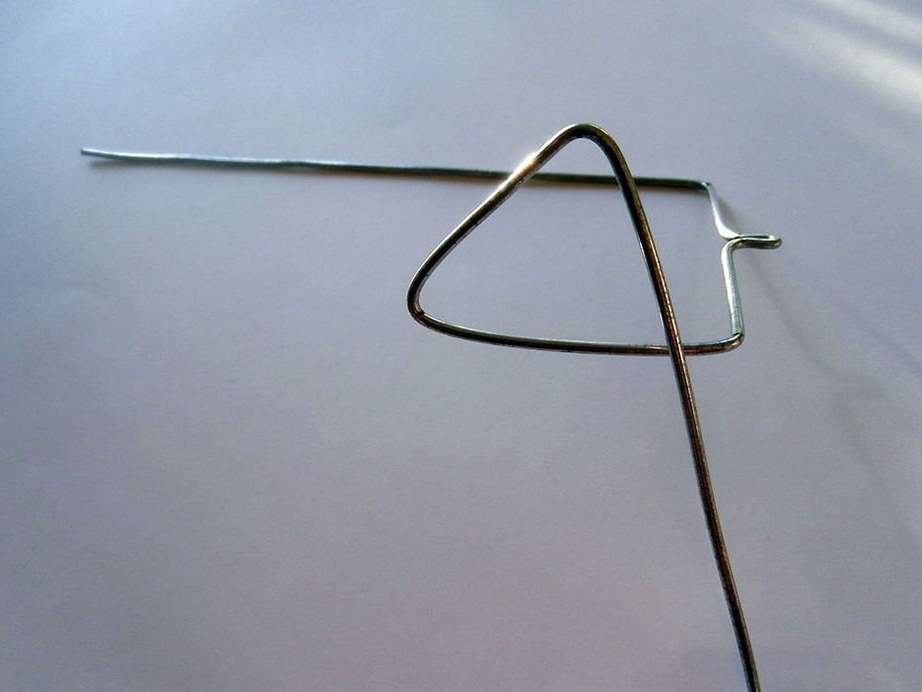
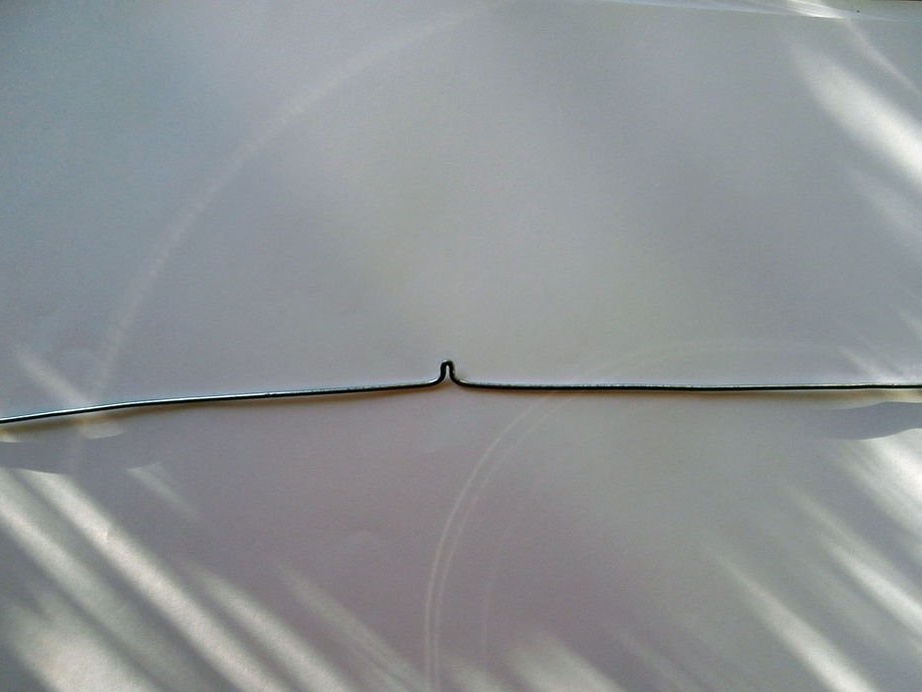
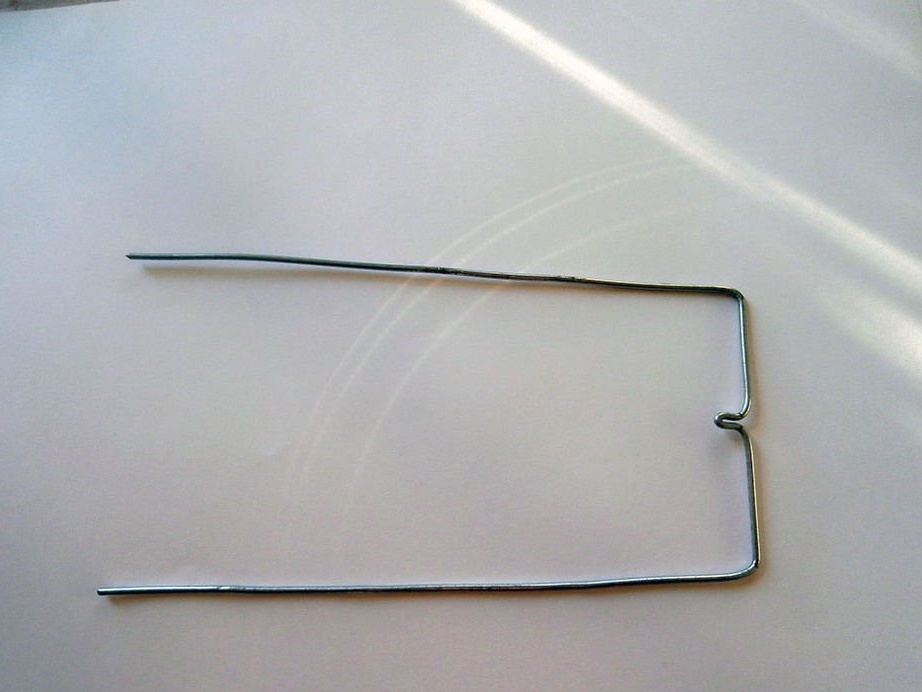
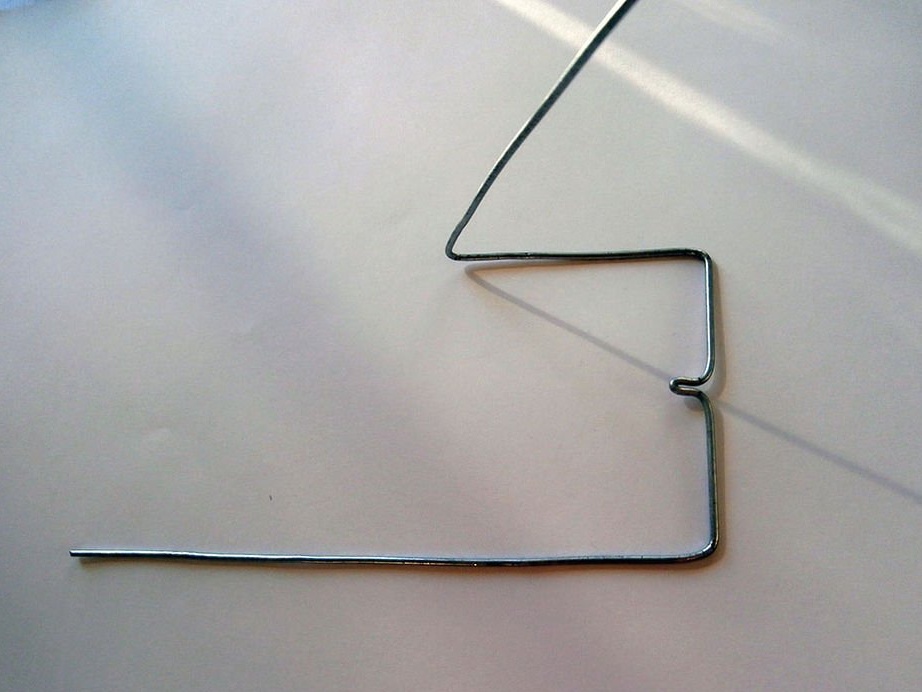
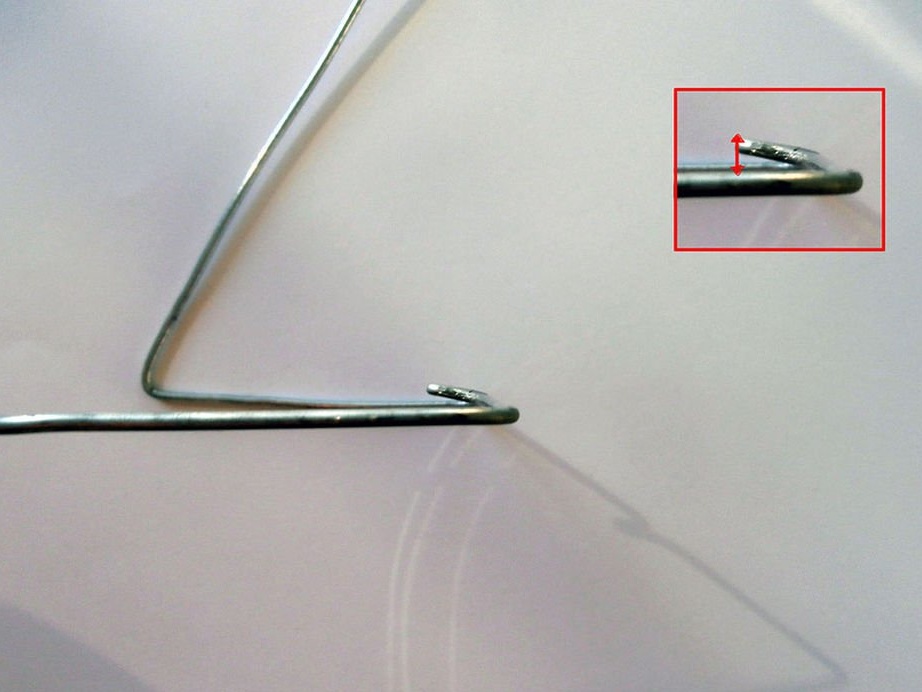
Trin 6: forben
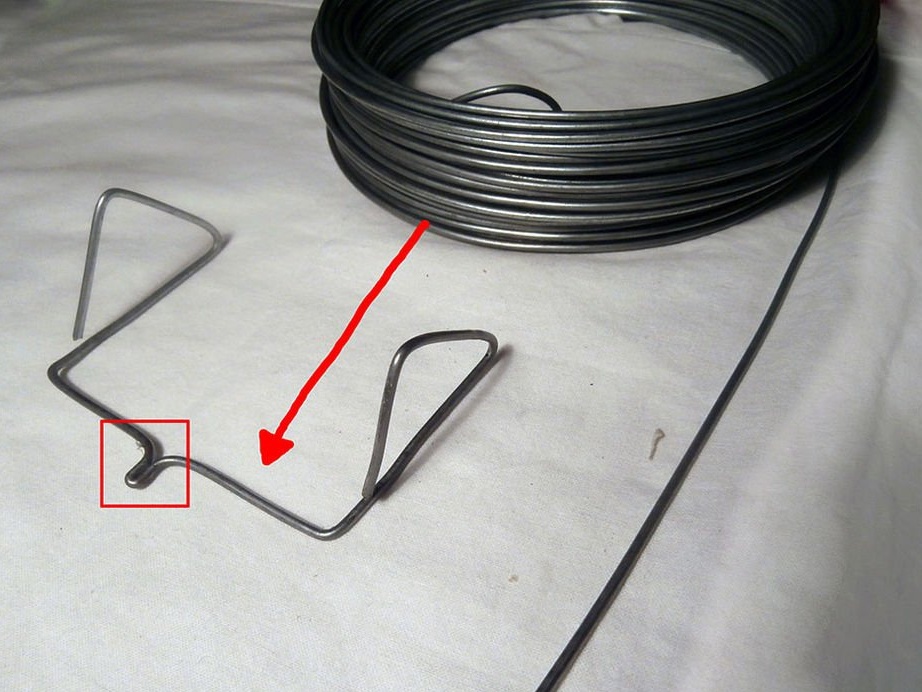
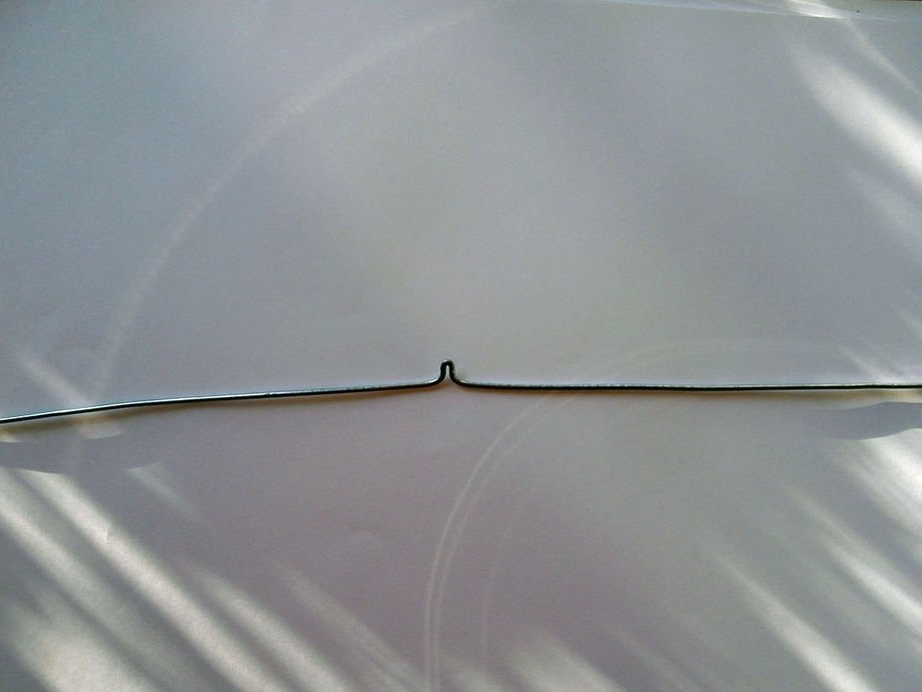
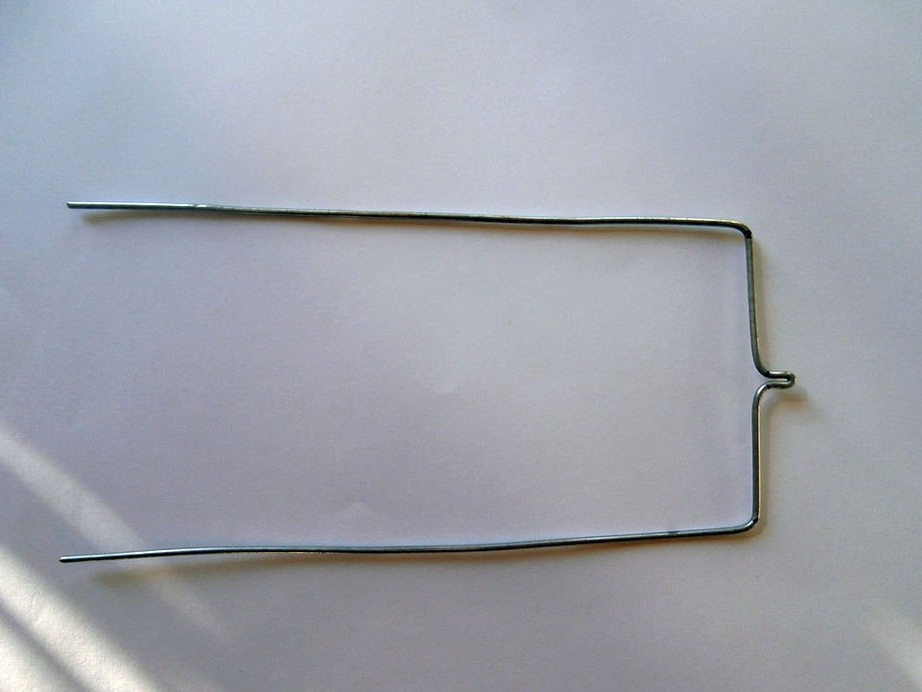
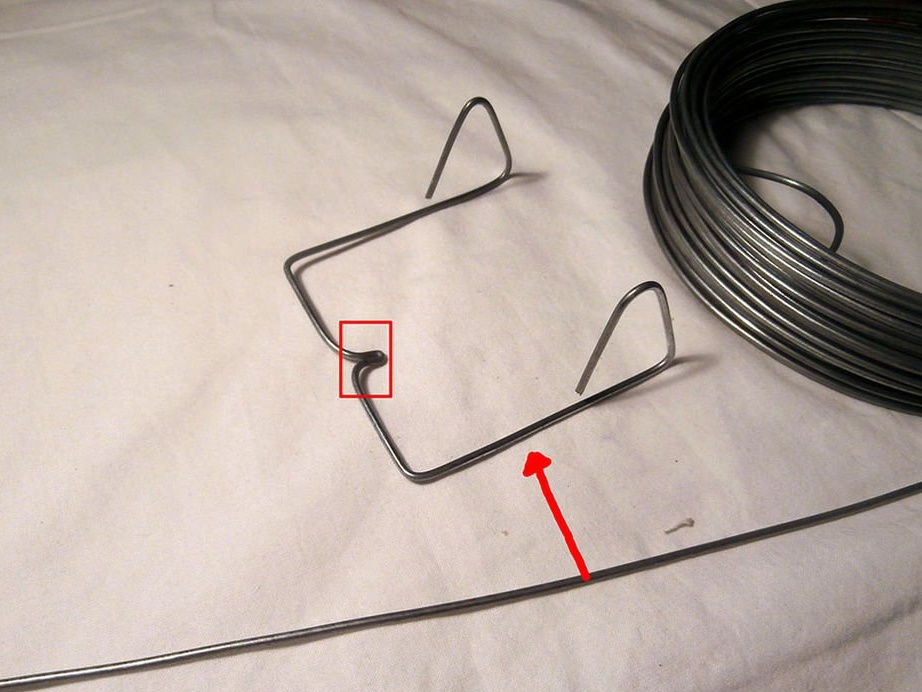
Trin 7: Bagben
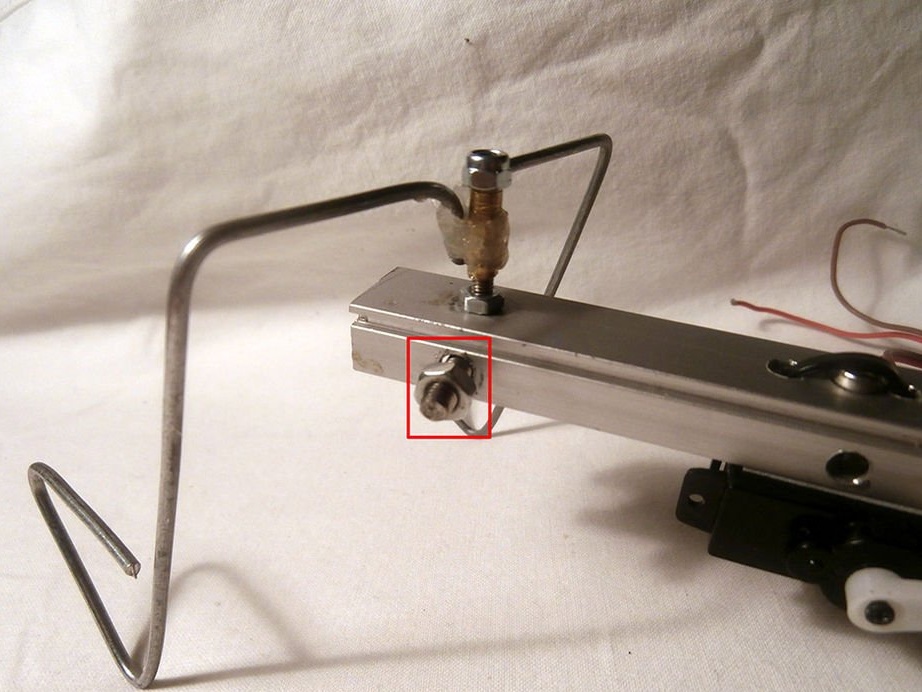
Trin 8: Montering af fødderne
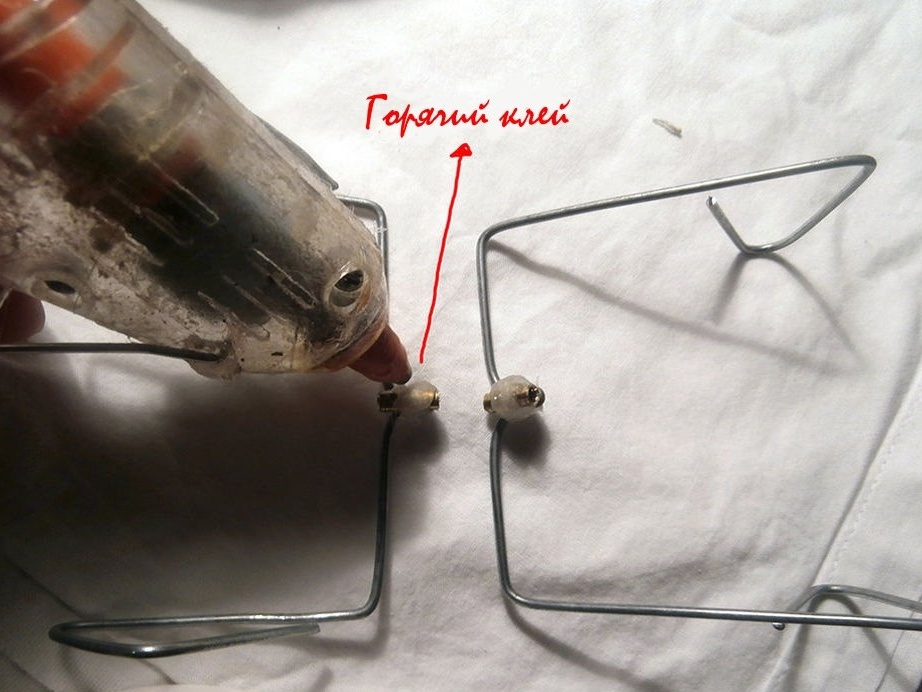
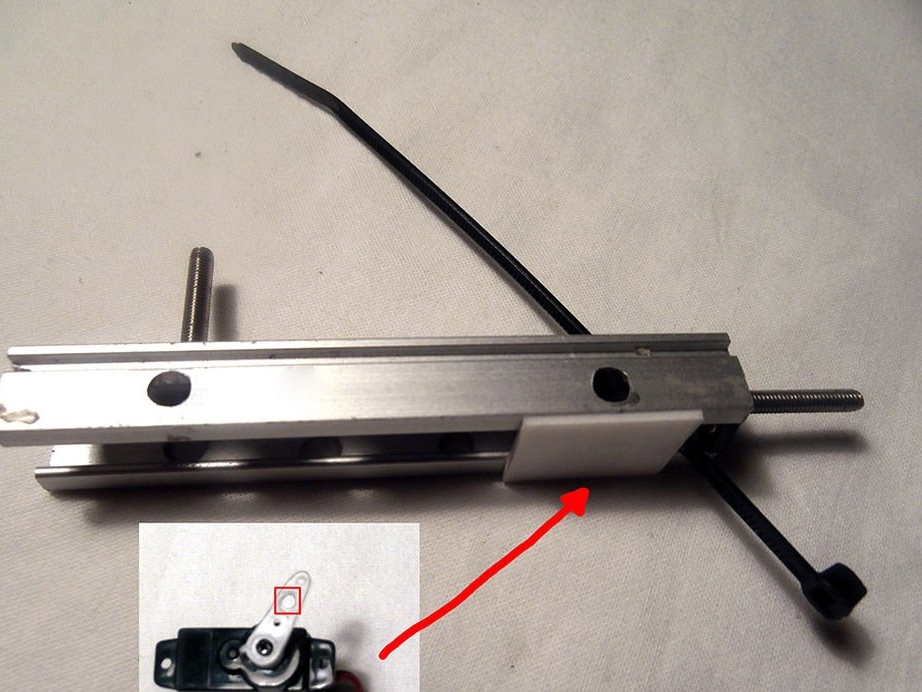
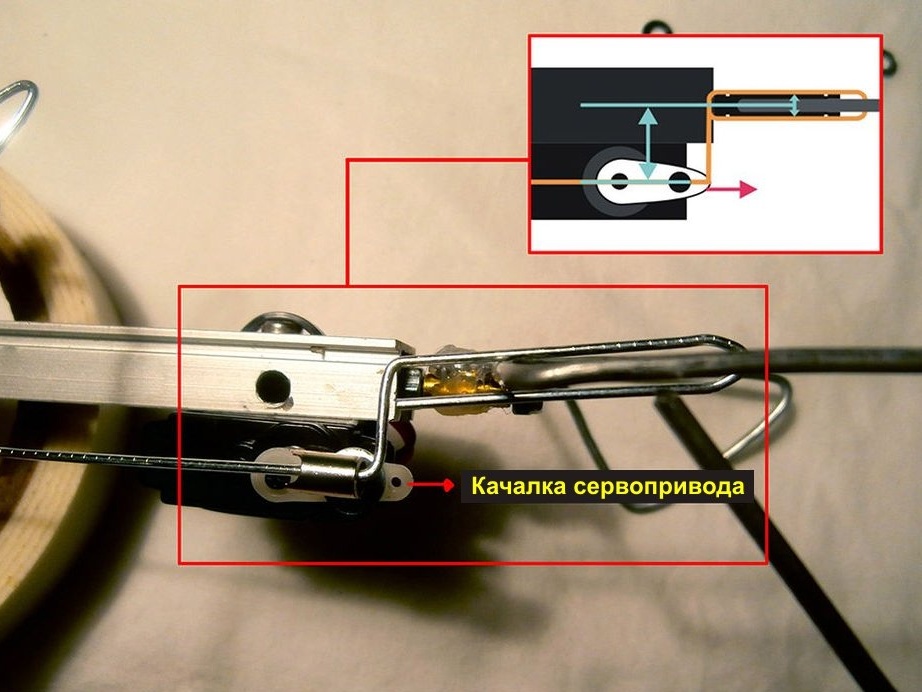
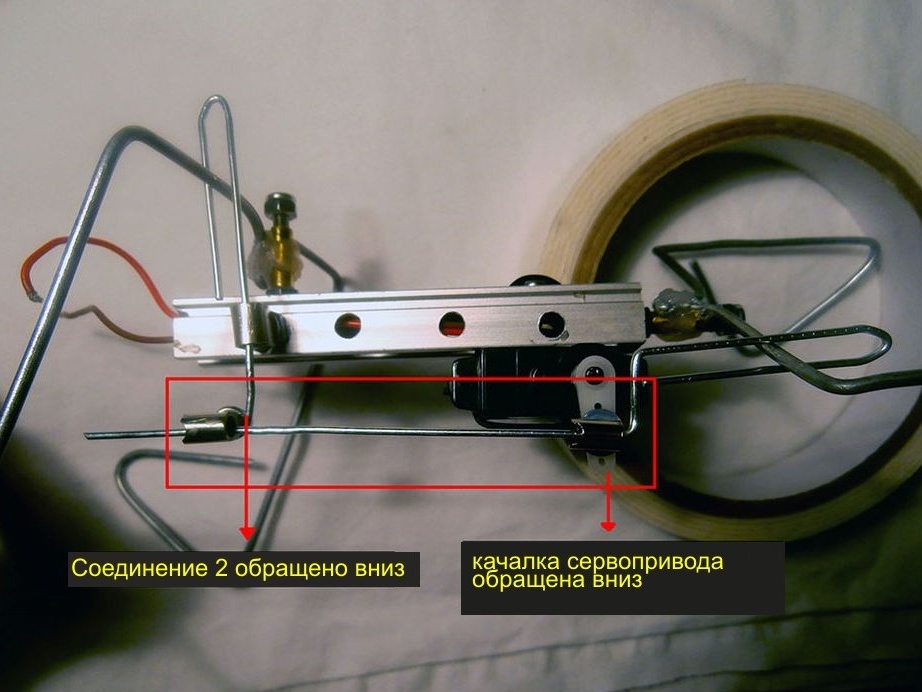
Trin 9: Kobling
Trin 10: Koblingsmontering
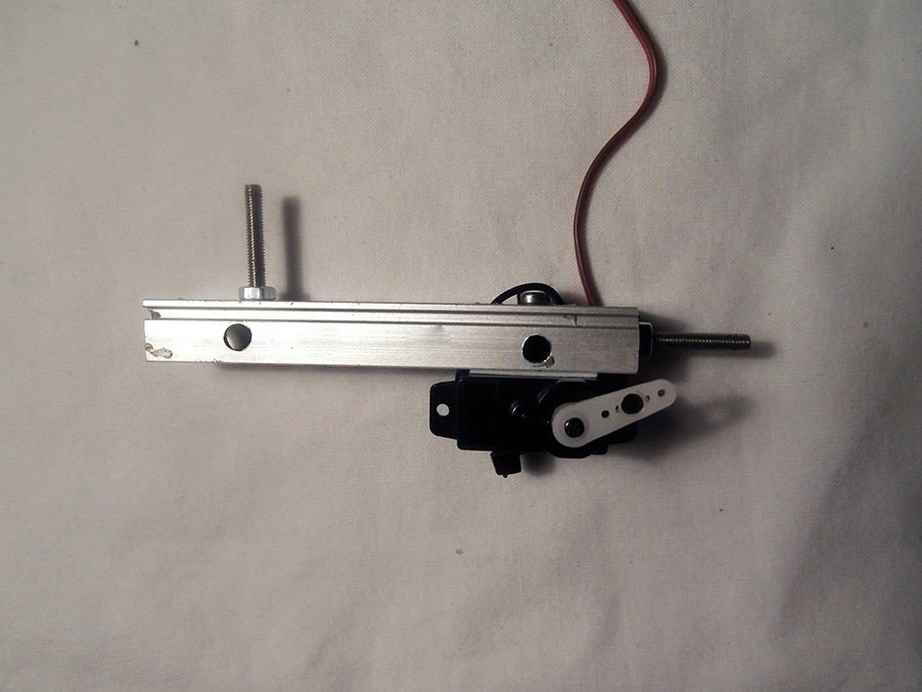
Trin 11: den sidste berøring
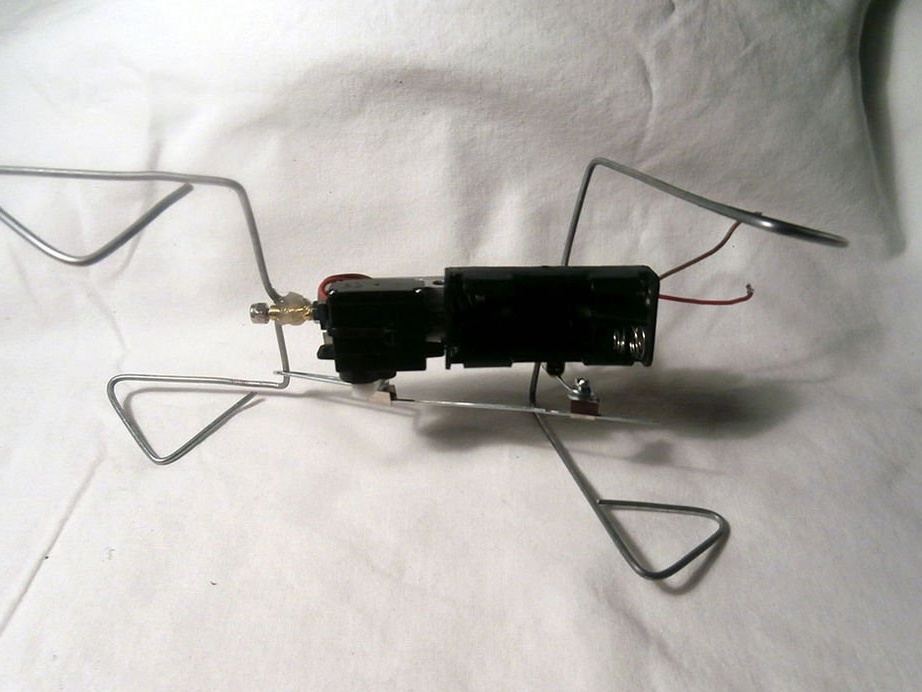
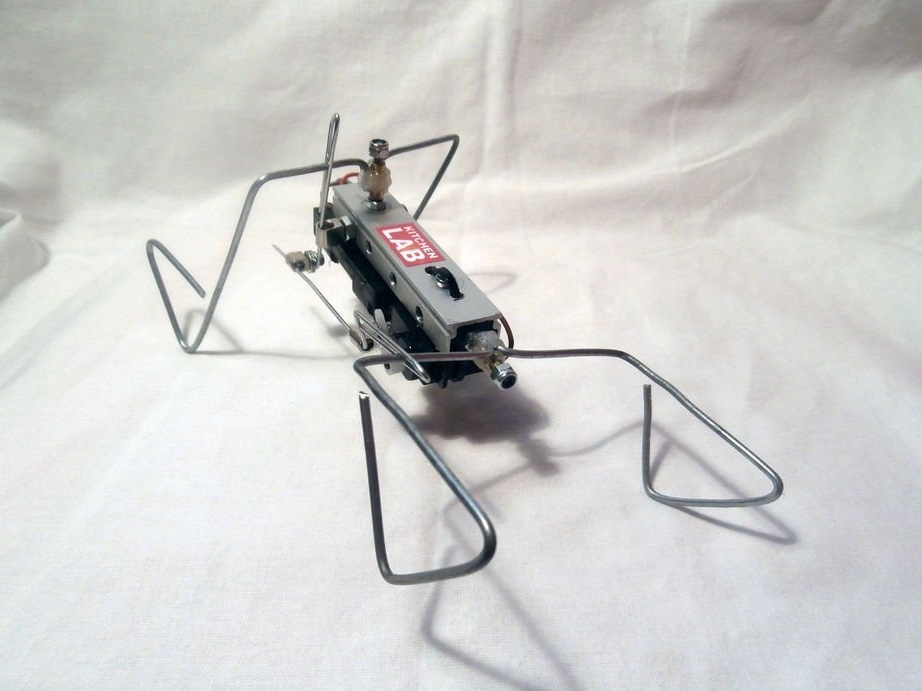
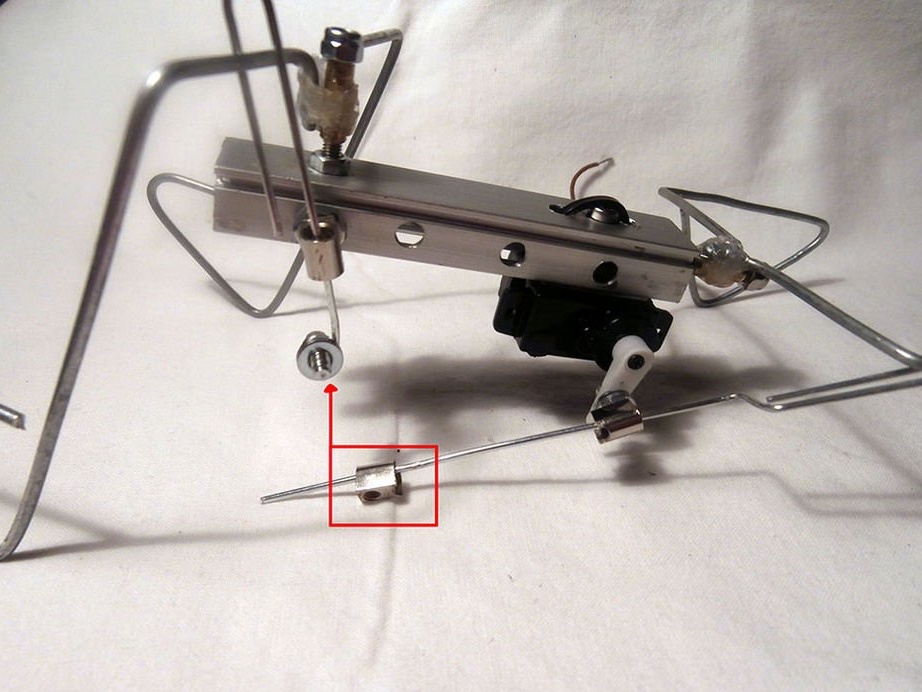
Til sidst skal du blot trække servoen og batterierne, og roboten Uglen starter en rejse rundt i dit hjem :)