
Jeg har for nylig bygget dusinvis af robotter, hovedsagelig inspireret af BEAM-robotikens vidundere. Hvis du ikke er bekendt med denne teknologi, er BEAM en speciel metode til konstruktion af robotter med vægt B - biologi, E - elektronik (elektronik), A - æstetik (æstetik) og M - mekanik (mekanik). Dette er forkortelsen BEAM. Det, der adskiller denne teknologi fra andre tilgange, er brugen af kun strålingsenergi til ernæring (hovedsageligt solenergi), bortskaffelse af forskellige materialer (genanvendelse) og minimalisme. Selvom jeg har vedtaget disse principper, mine egne robotter var ikke helt i ånden af BEAM (de blev drevet af et batteri).
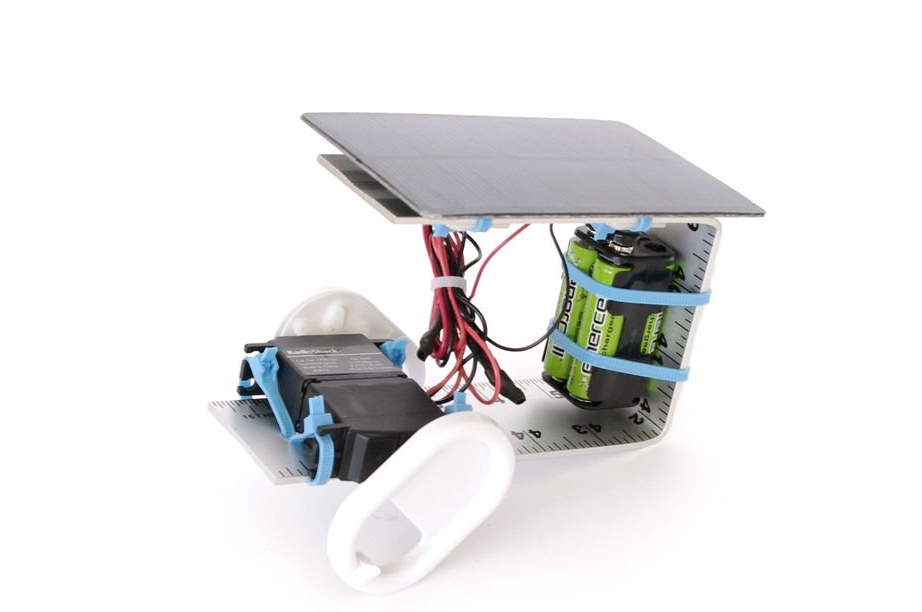
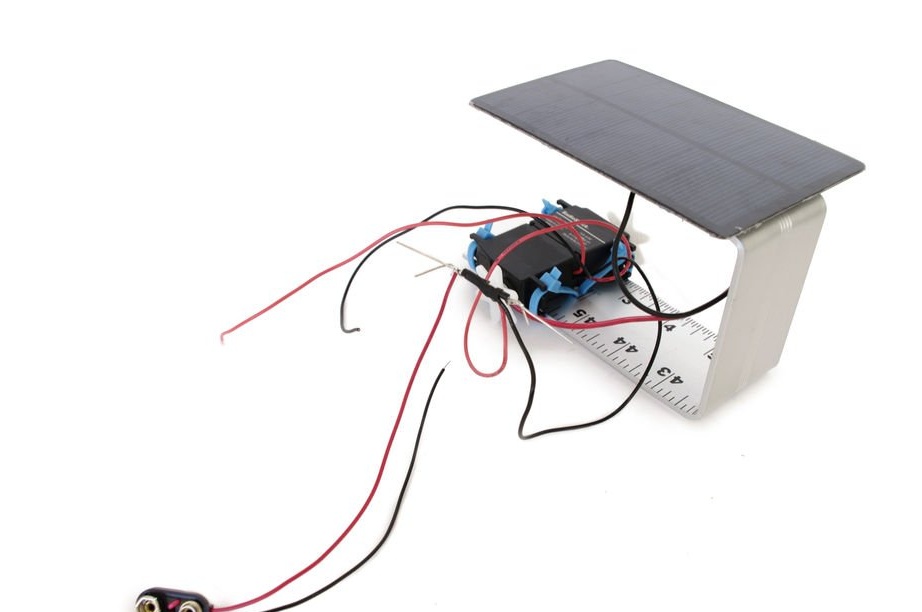
Da BEAM-robotik inspirerede mig alvorligt, ville jeg lave en solcelledrevet robot. Men i stedet for bare at lave en BEAM-robot, besluttede jeg at integrere et solpanel i roboten efter min sædvanlige stil. I stedet for at være fuldt drevet af solen, besluttede jeg at indbygge genopladelige batterier. Det vil sige, min robot kan drives enten fra et batteri eller fra et solcellepanel, afhængigt af hvilken strømkilde der i øjeblikket er mere kraftfuld. Solcellepanelet oplader også batterierne, når sollys rammer det. Dette gør det muligt for roboten at bevæge sig både i lyset og i skyggen.
Jeg tror, at denne fremgangsmåde med succes kombinerer to stilarter, og dette er et interessant eksperiment i konstruktion af robotter.
Trin 1: Materialer
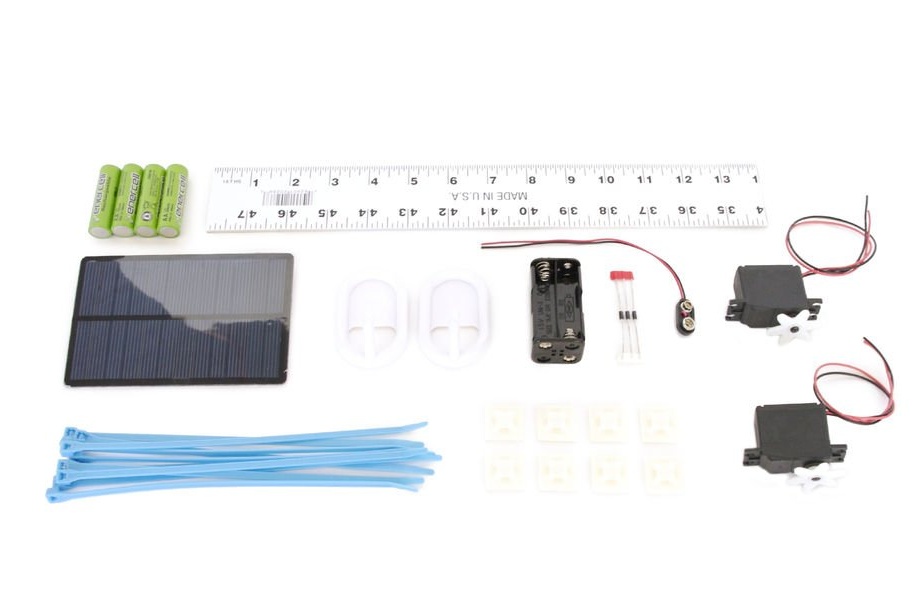
Du har brug for:
(x1) Solpanel
(x2) Standard servomotorer
(x3) Schottky Diodes 1N5817 - NTE578 ækvivalent
(x1) 9V batteri
(x8) Genopladelige AA-batterier
(x1) 8 x AA-batteripakke
(x12) Base til klemmer
(x1) Lineal (30 - 50 cm)
(x2) Vægmonterede klæbekroge
(x1) Plastklemmer
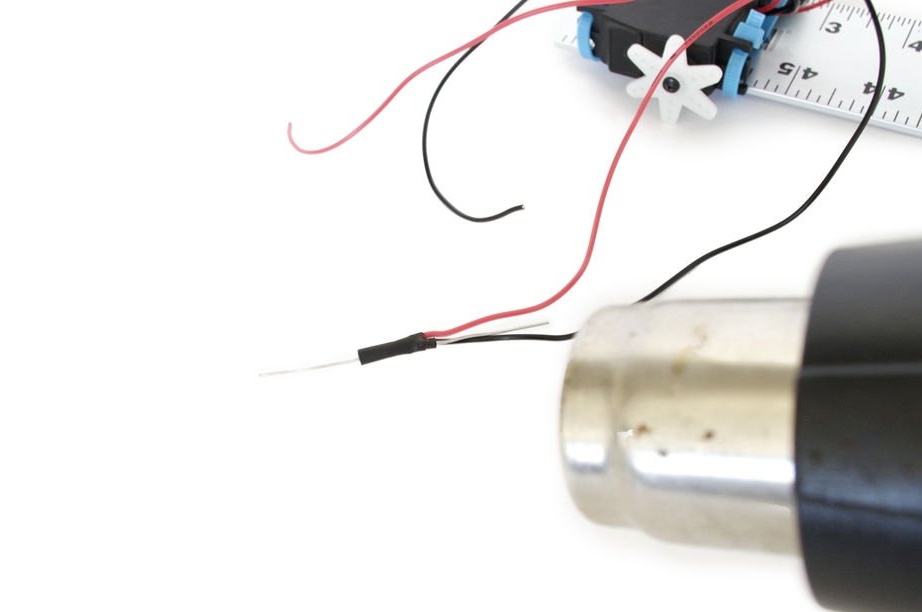
(x1) Heat Shrink Tubing
Trin 2: Rediger Servo

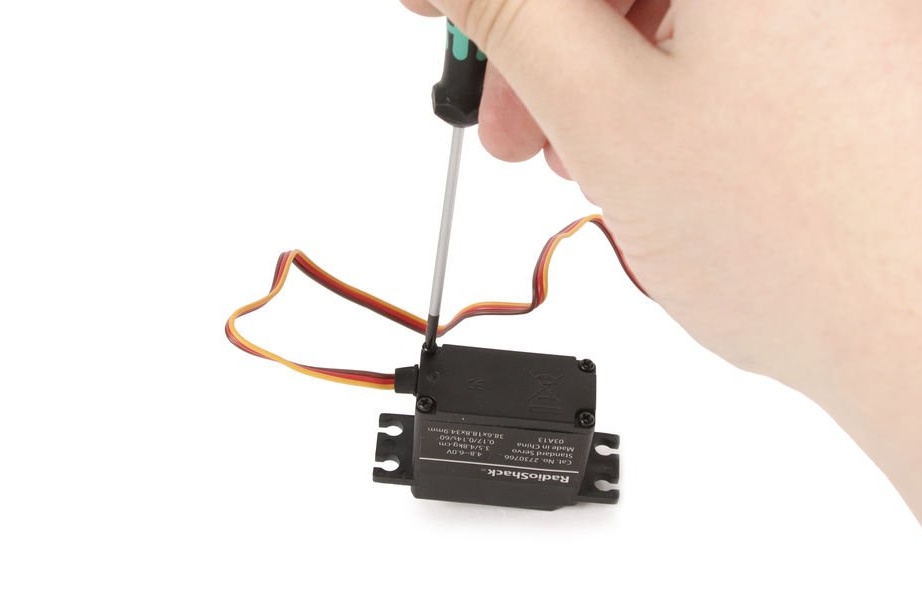
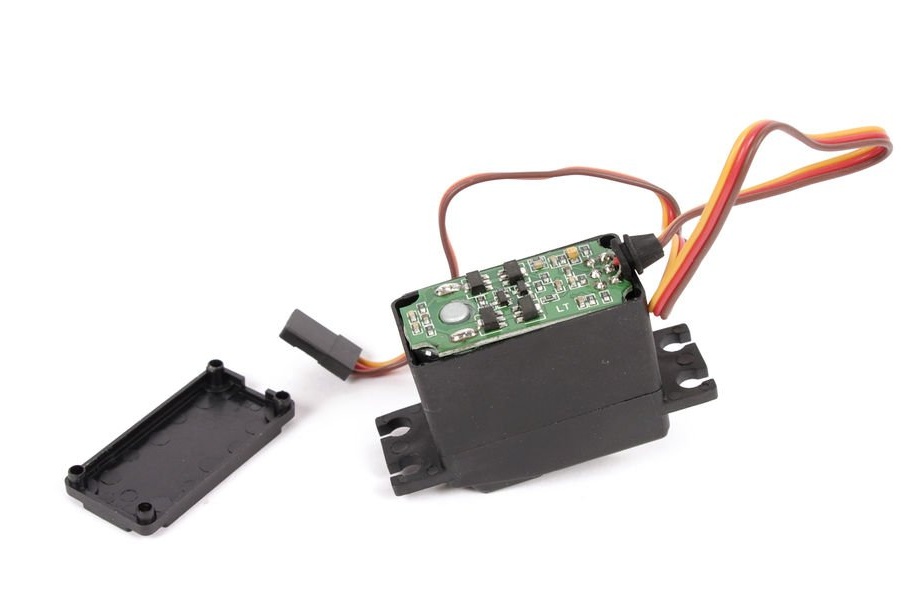
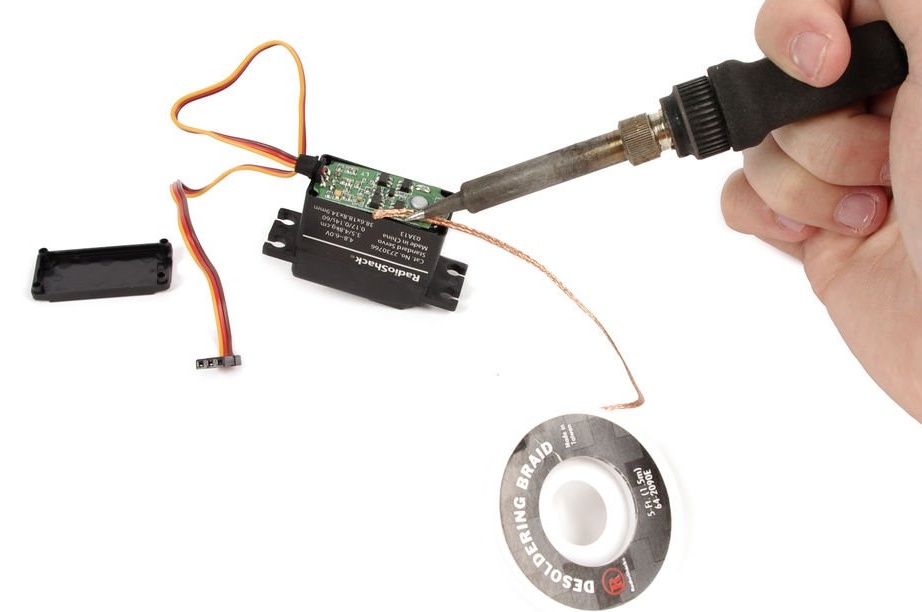
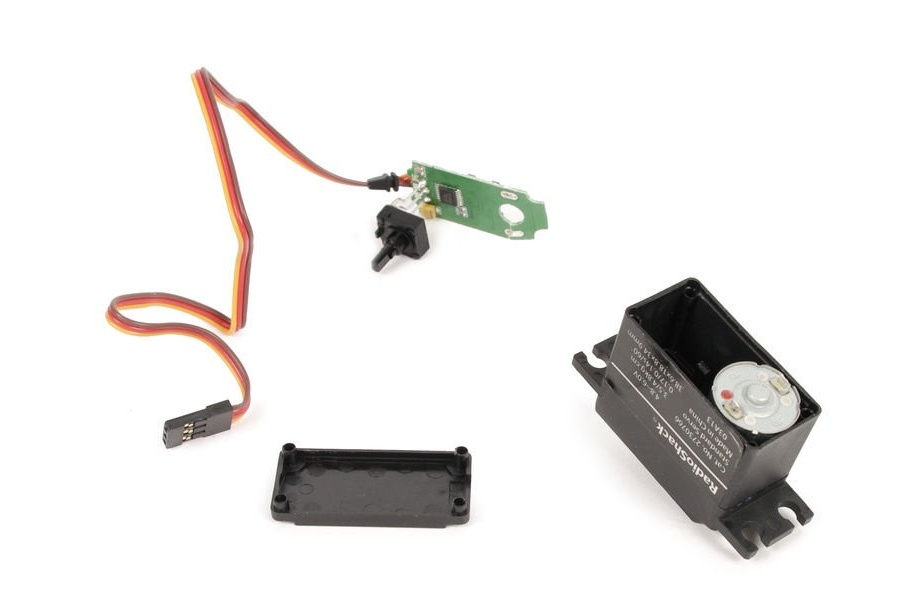




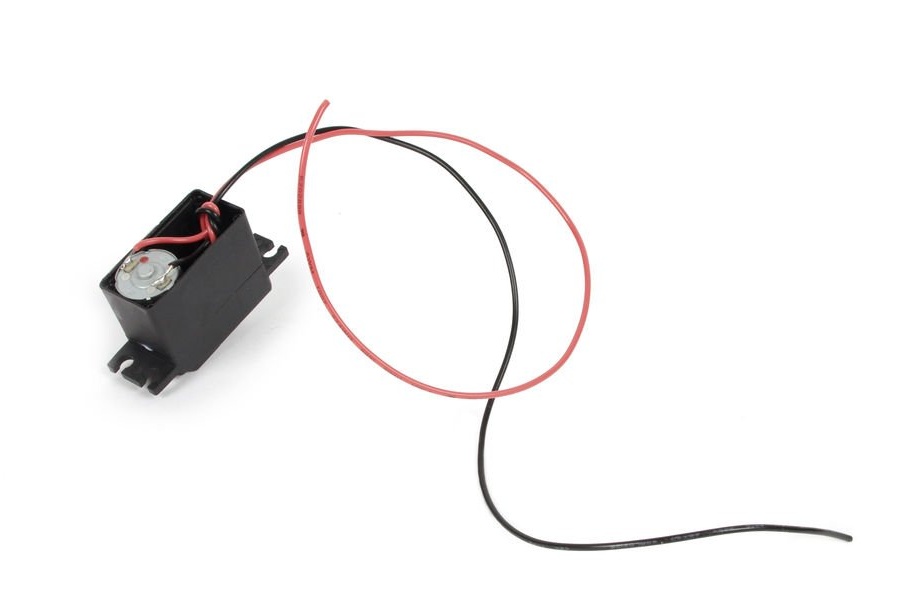
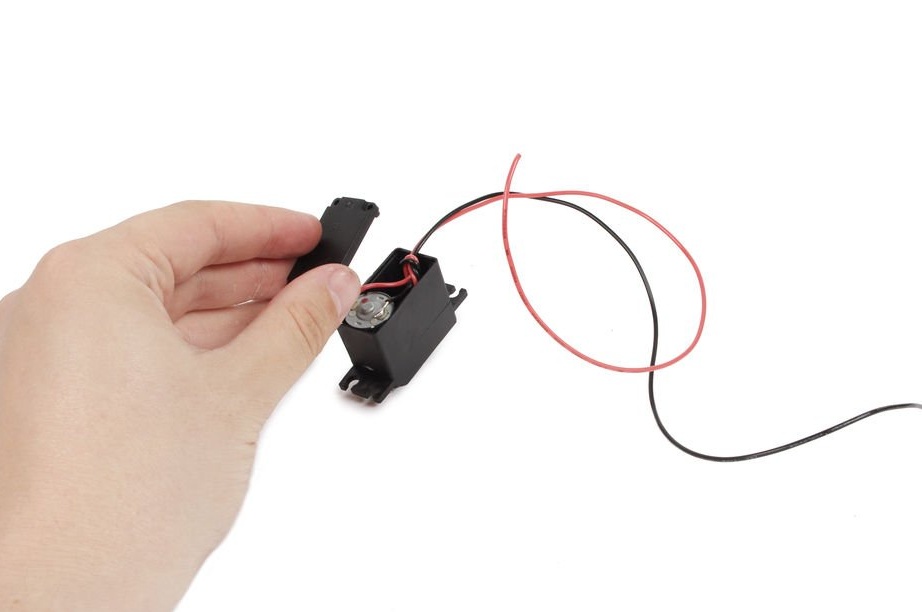

Åbn servohuset ved at skrue ud 4 skruer på bundpladen. Pak kortet inde og tilslut de røde og sorte ledninger til hver terminal på drevet.
Åbn geardrevet og find gearet med en lille plastikkappe, der forhindrer kontinuerlig rotation. Klip hætten af gearet.
Trin 3: Bor
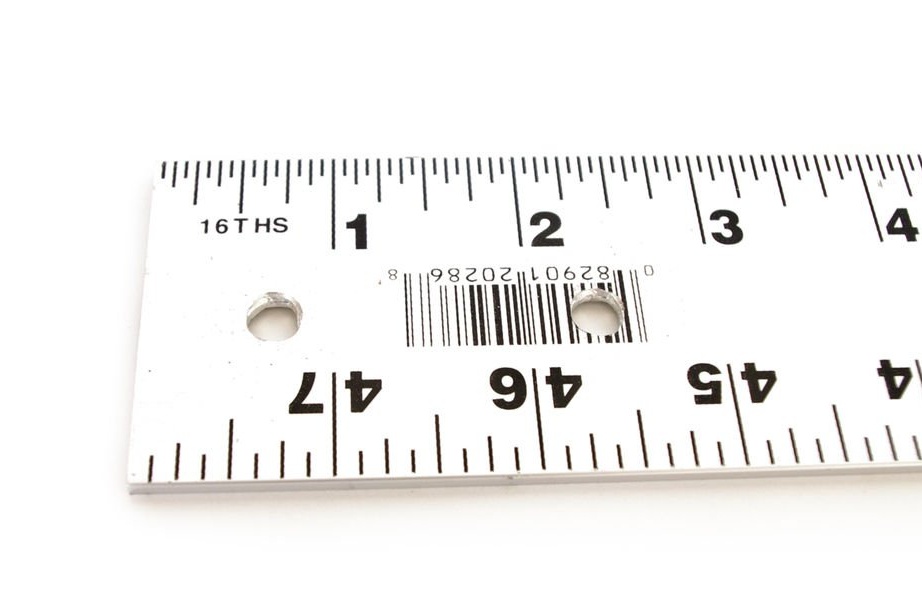


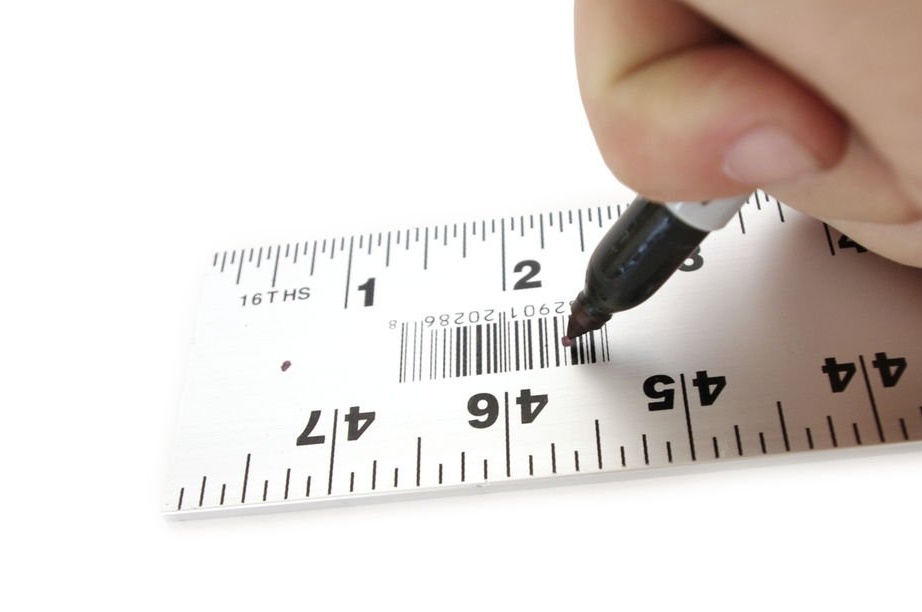
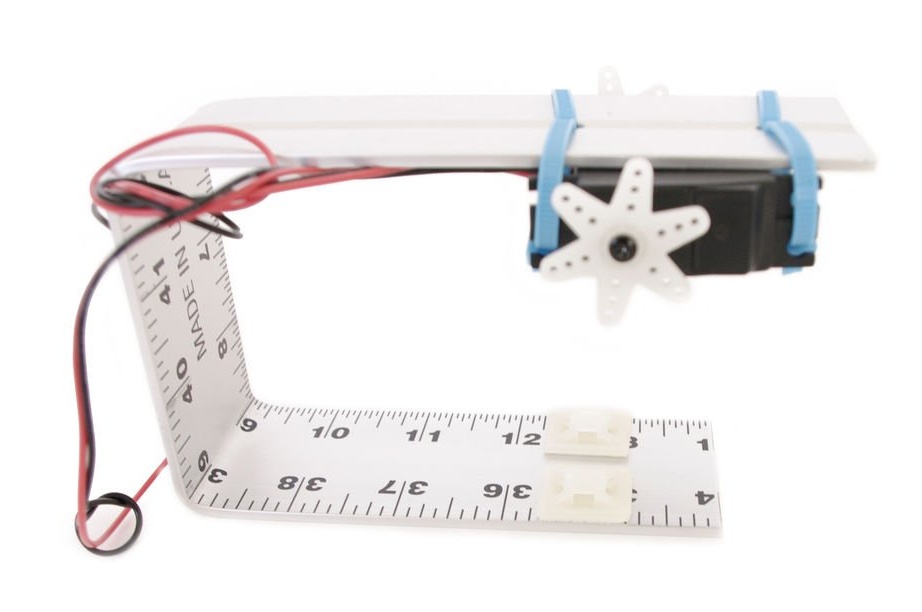
Bor et 6,3 mm stort hul i midten af linealen, ca. 15 mm fra den korte kant. Bor et andet hul ca. 60 mm fra den samme kant.
Trin 4: Bøj

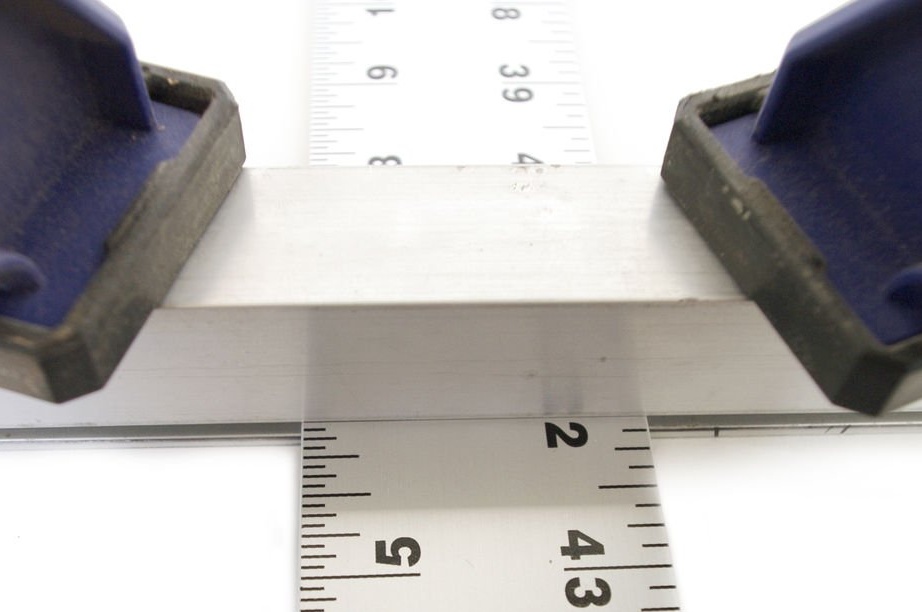
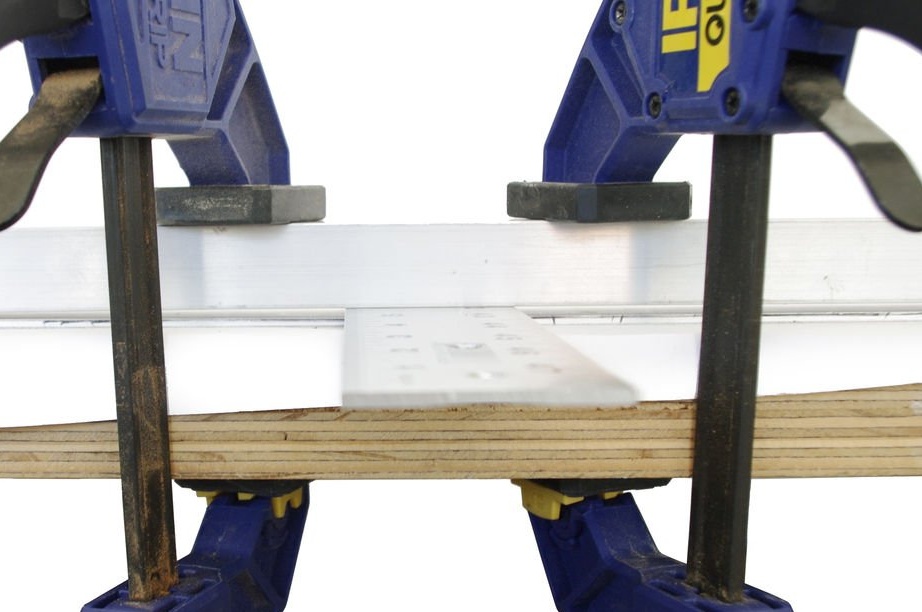

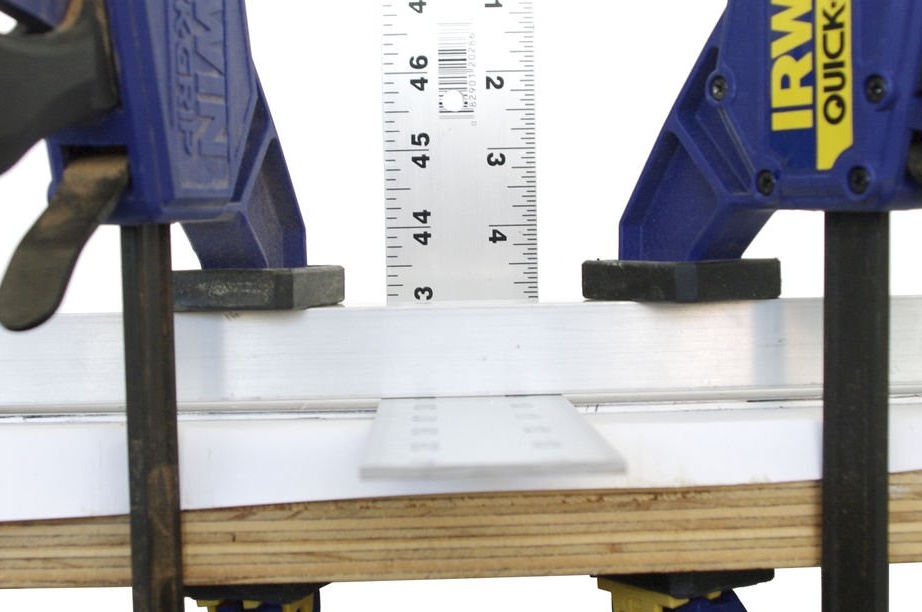

Brug en skruestik eller to metalplader, der er fastgjort på kanten af bordet, og bøj linealen i en vinkel på 90 grader i en afstand af 15 cm fra kanten, hvor hullerne blev boret i.
Lav den samme bøjning i en vinkel på 90 grader i en afstand af 15 cm fra den anden kant. Du får et tal i form af bogstavet P.
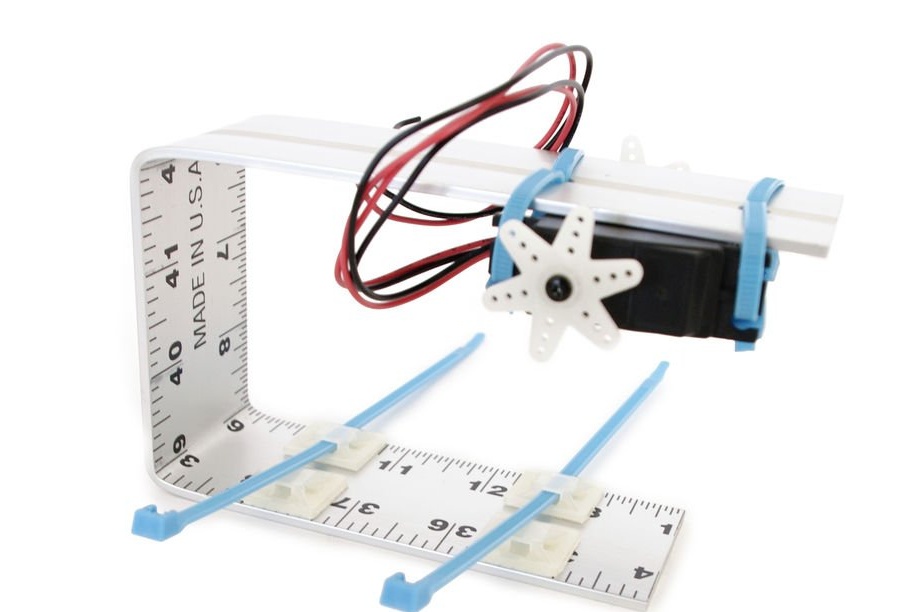
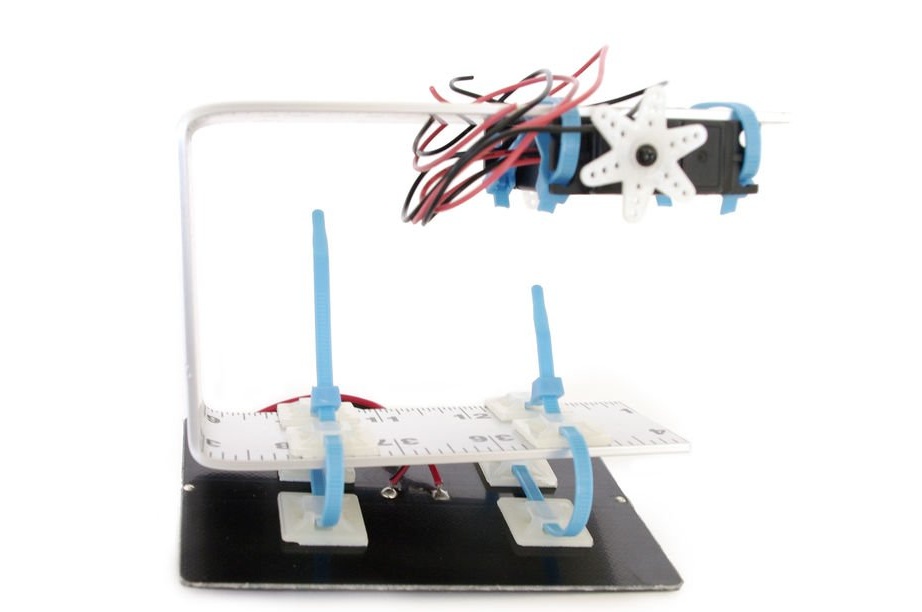
Trin 5: Forbindelse
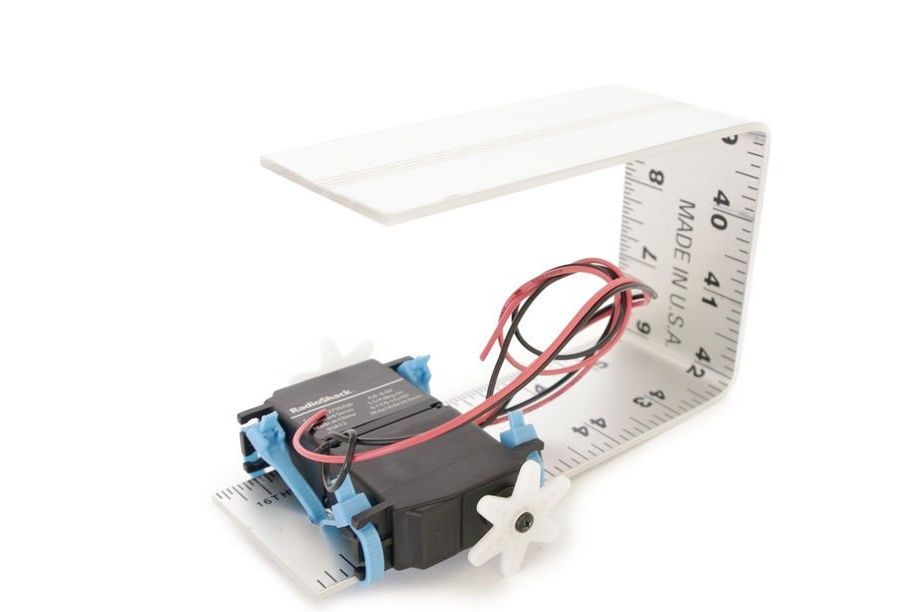

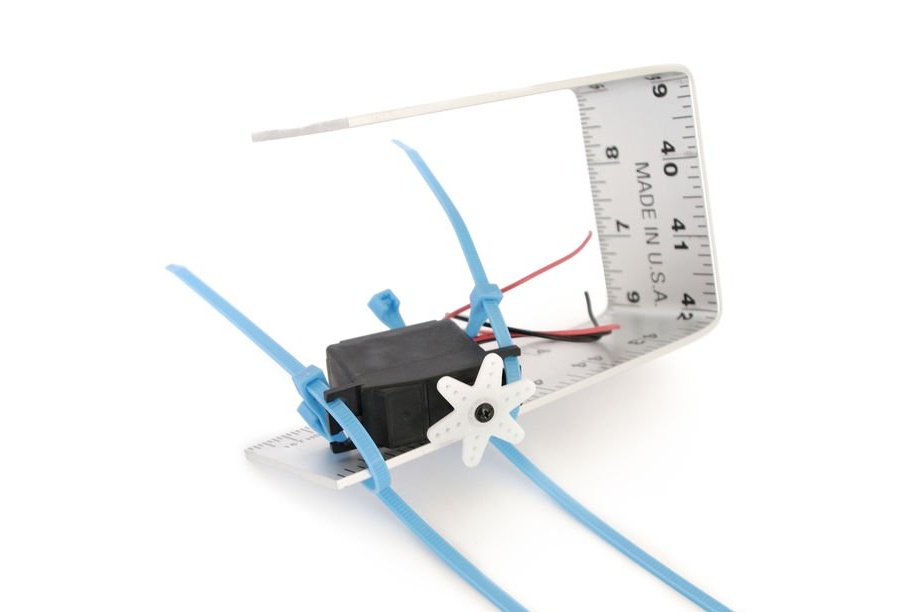
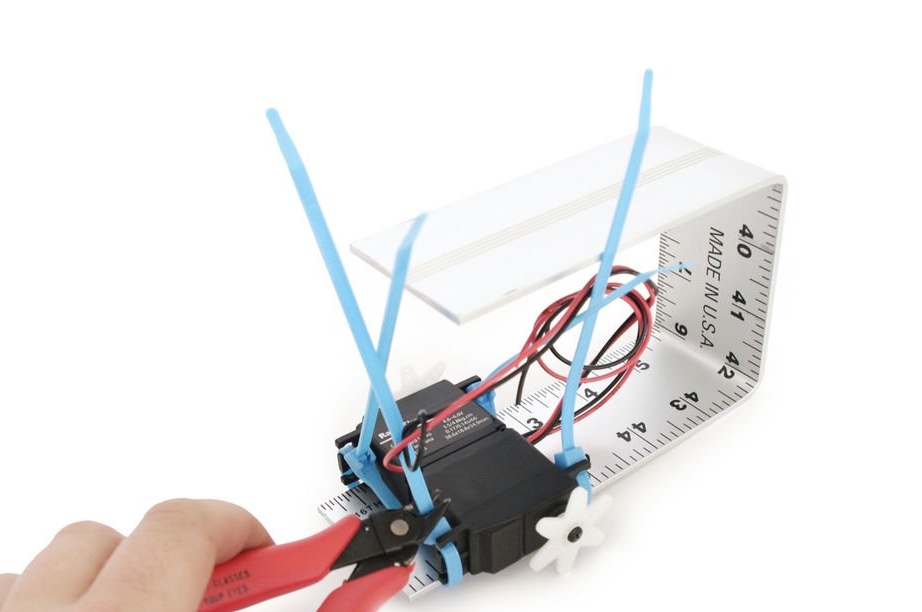
Det er nødvendigt at fastgøre servoer på linjen med plastklemmer gennem borede huller. Servomotorer skal sidde med ryggen til hinanden.
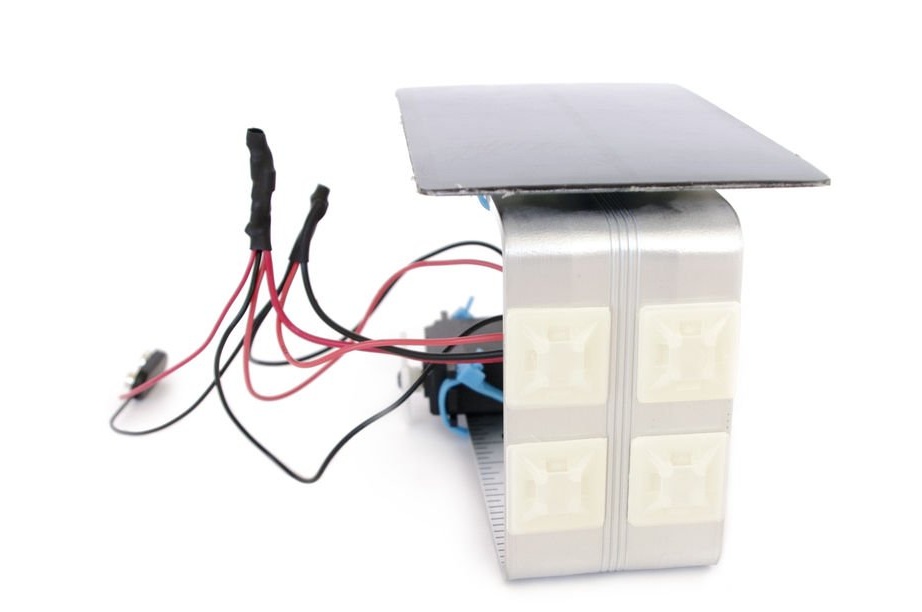
Trin 6: Bund til klemmer
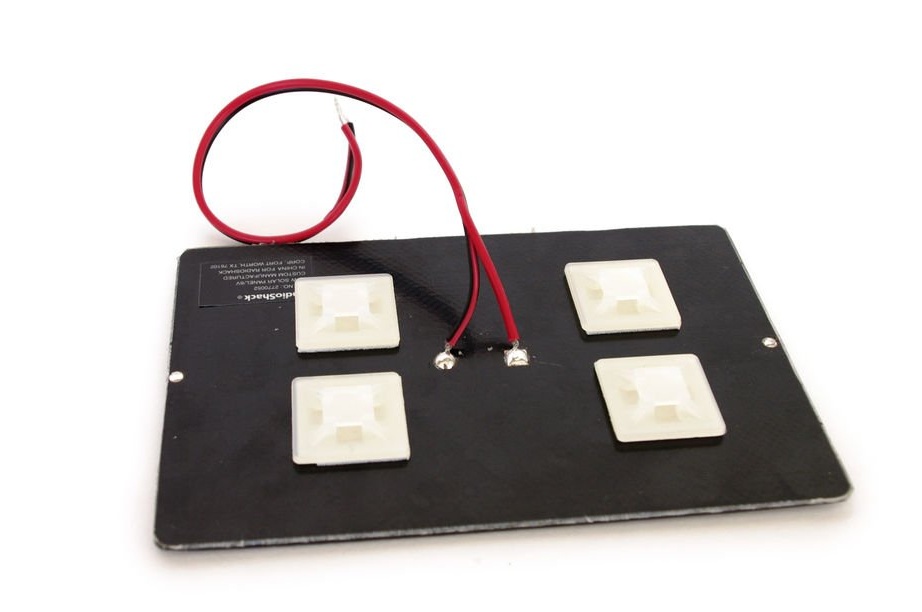

Placer to par klemmebaser ved siden af hinanden på bagsiden af solcellepanelet. Det er vigtigt, at kanalerne for hvert par er på samme linje.
Trin 7: Flere grunde
Fastgør yderligere to baser på indersiden af U-stangen, på siden overfor servoer.
Trin 8: Forbindelse
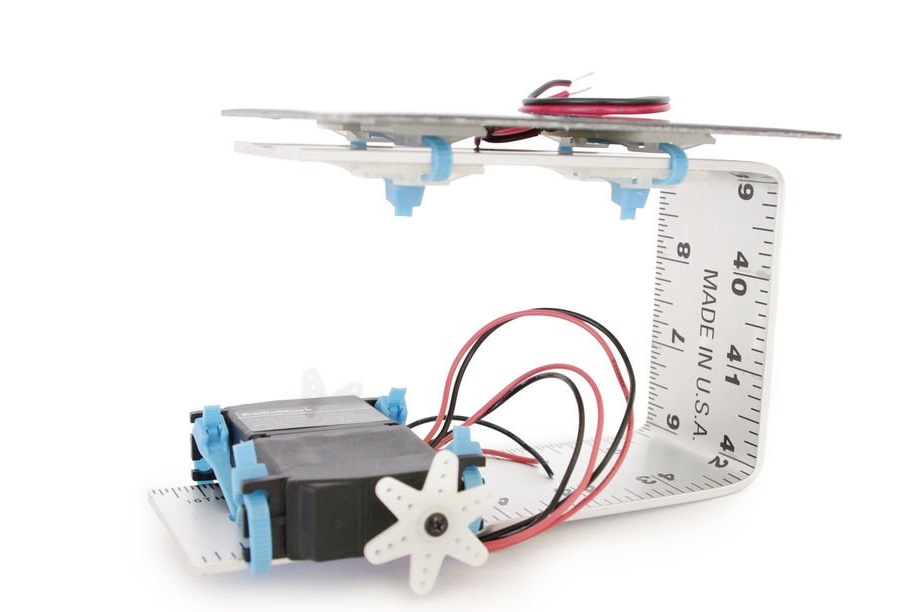
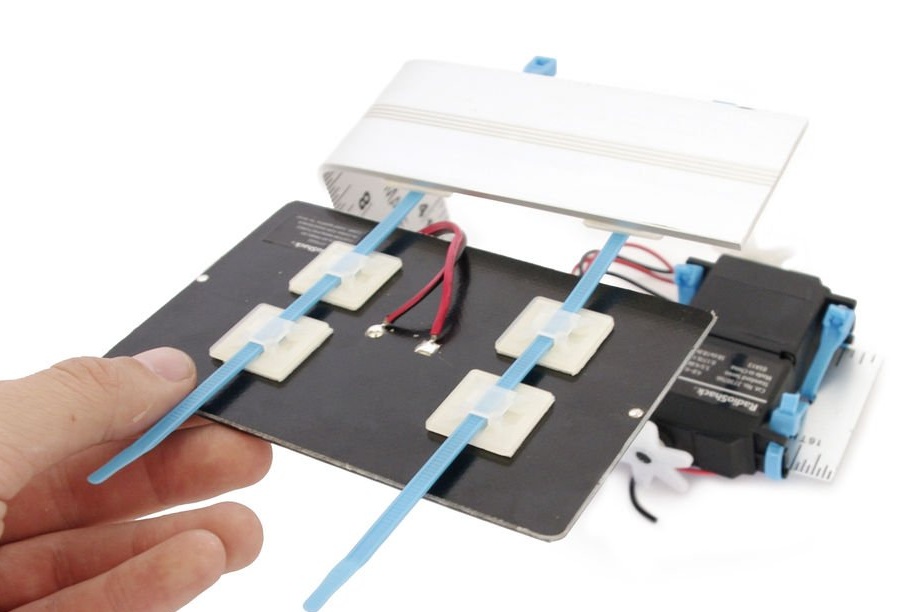
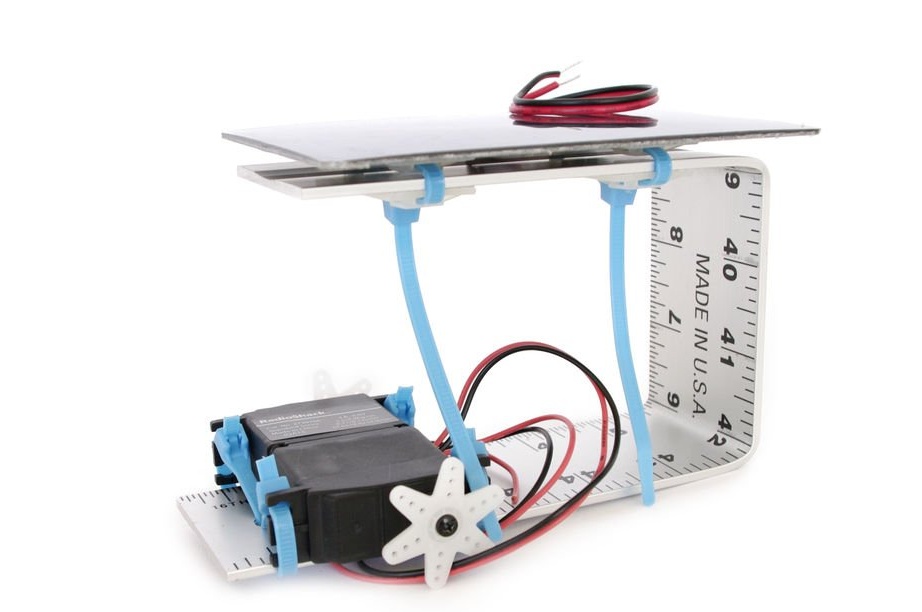
Fastgør solcellepanelet med klemmer gennem faste baser.
Trin 9: Isæt batterierne


Indsæt batterierne i batteripakken.
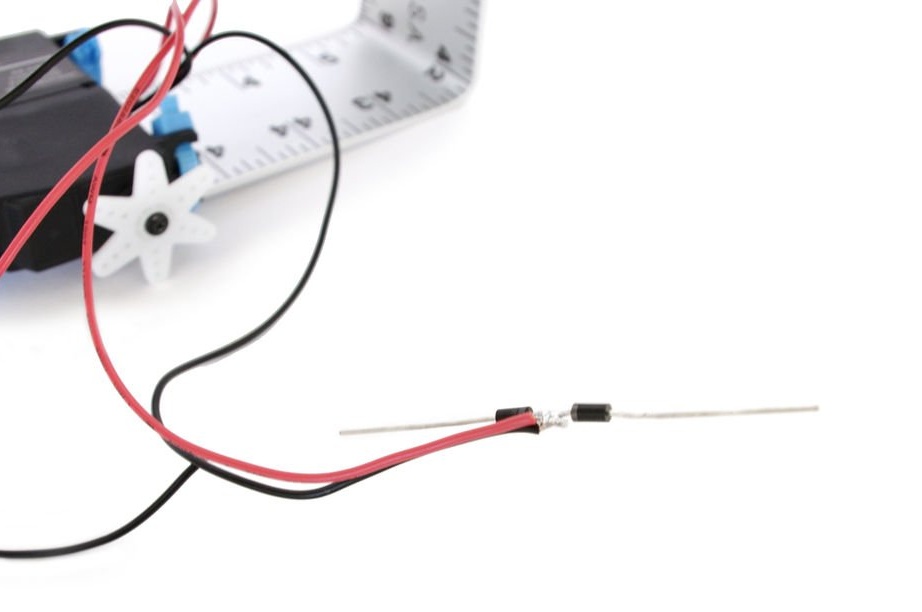
Trin 10: Dioder

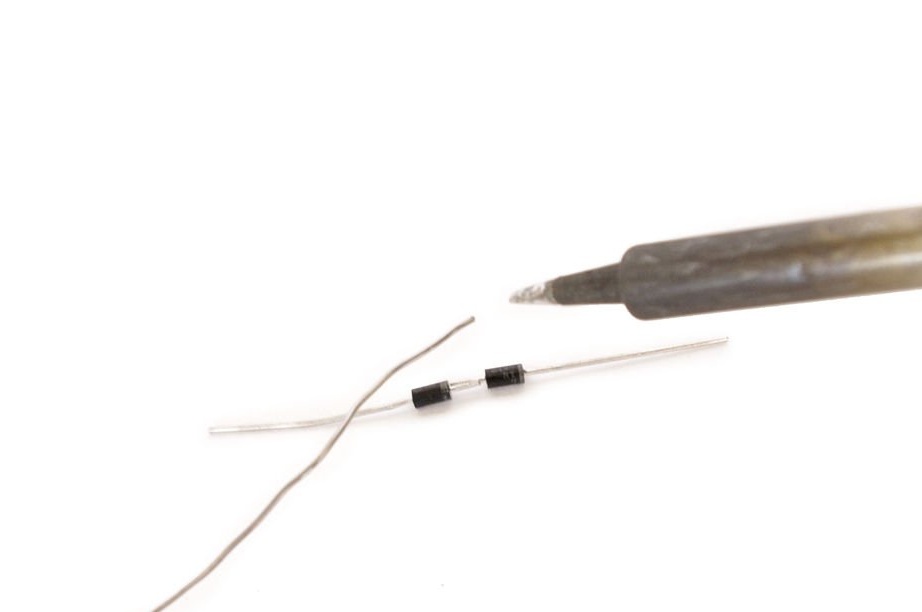
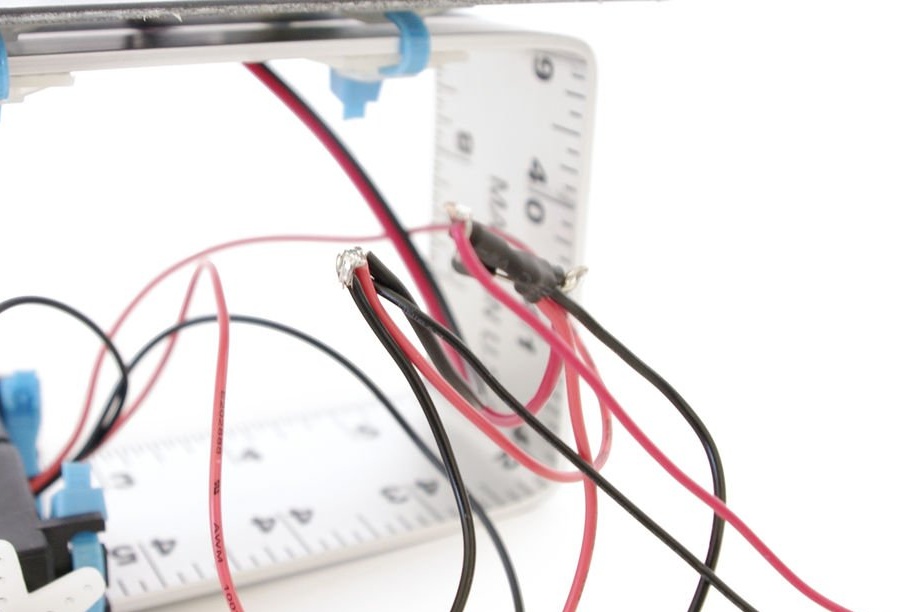
Lodde de to dioder sammen med katoderne (siden af dioderne med sporet).
Trin 11: kædeindretning
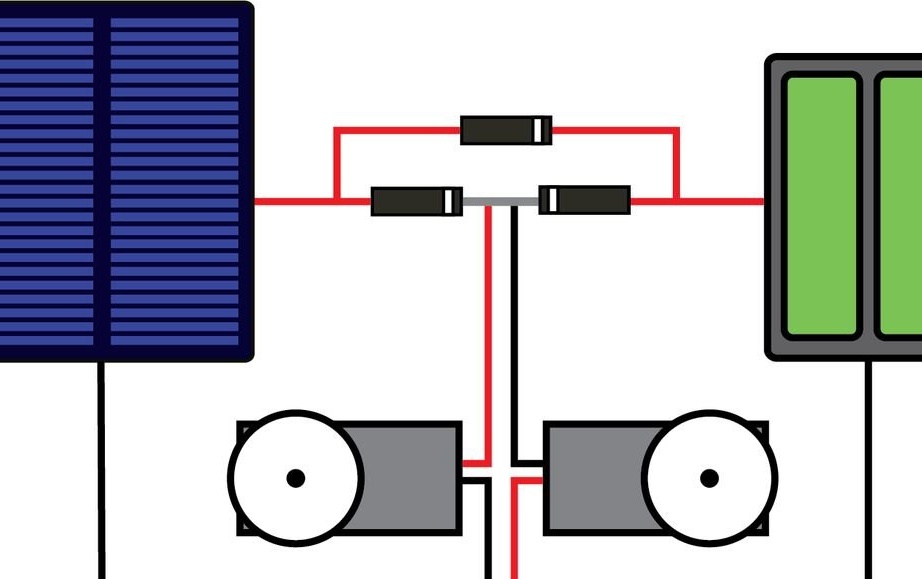
Kredsløbet til denne robot er baseret på David Cooks enkle solopladningskredsløb. Kredsløbet indeholder to Schottky-dioder, der er forbundet til katode-til-katoden, en diode tilsluttet solcellepanelet og en af batterierne. Denne konfiguration giver dig mulighed for at blive drevet af både batterier og solcellepanel, afhængigt af forholdene.
Da batterierne er genopladelige, forbindes en tredje Schottky-diode direkte fra solcellepanelet til batterirummet for at oplade batterierne fra solen.
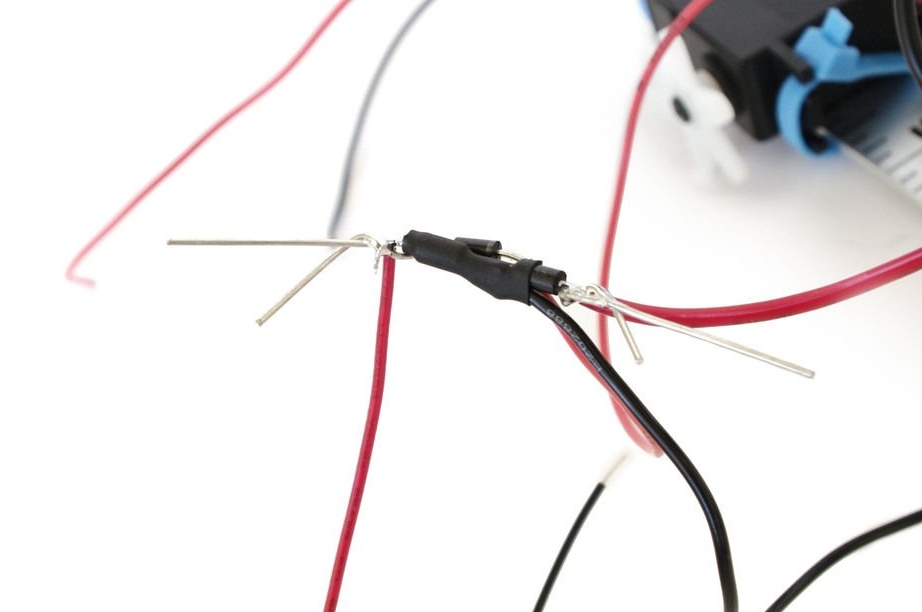
For at forbinde det hele skal du tilslutte den røde ledning fra en af servoerne og den sorte ledning fra den anden til centrum af katodeforbindelsen.
Tilslut derefter den røde ledning fra batteriterminalen til anoden til en af Schottky-dioderne. Forbind den røde ledning fra solcellepanelet til anoden på en anden diode.
Lod nu anoden fra den tredje diode til den røde ledning, der er forbundet til solcellepanelet, og katoden til den røde ledning fra batteriterminalen.
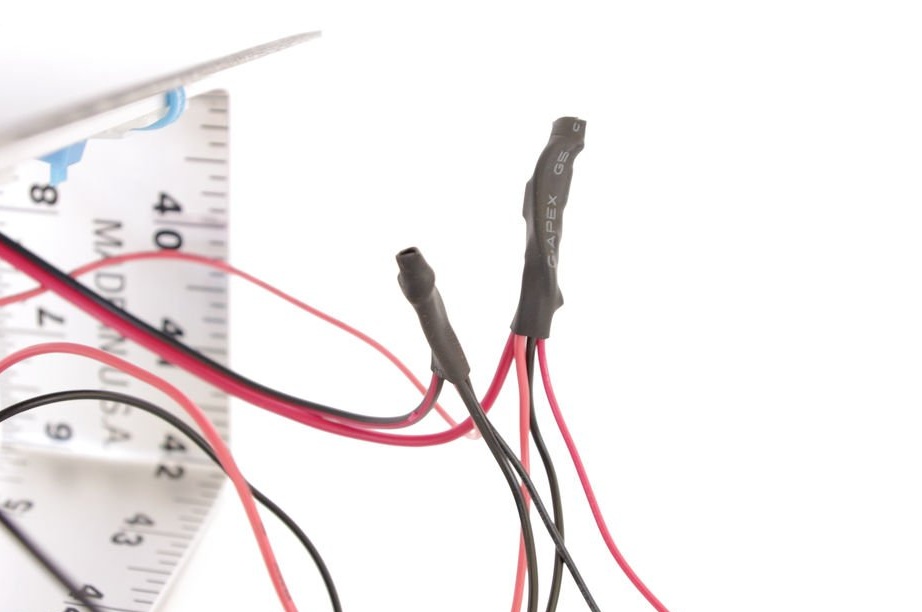
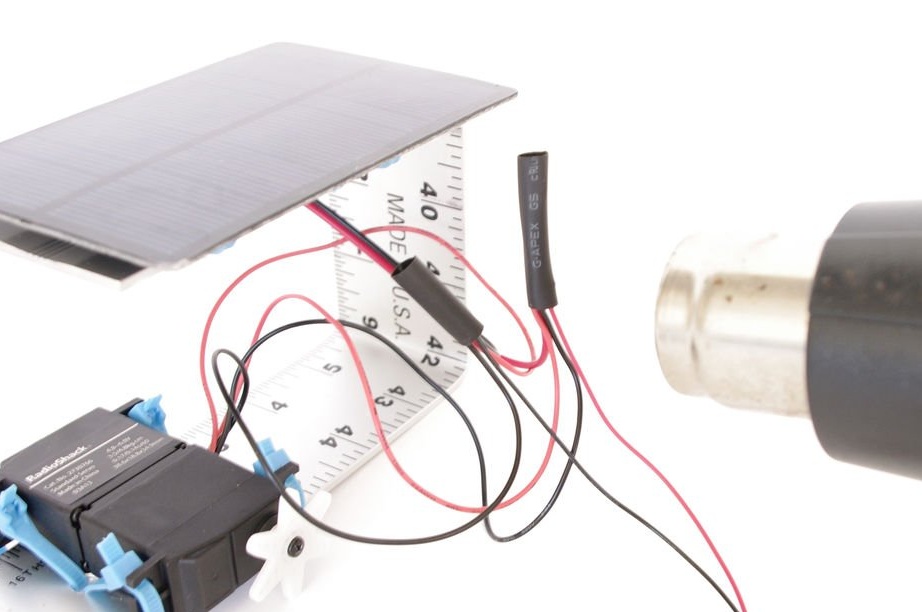
Indpak alle ledninger med varmekrympeslange for at beskytte kredsløbet mod kortslutninger.
Trin 12: Nogle flere ledninger
Lodde sammen alle sorte ledninger og de resterende frie røde ledninger fra servoerne.
Få to loddede samlinger; en til strøm og en til jordforbindelse. Indpak begge disse samlinger med varmekrympeslange eller elektrisk tape.
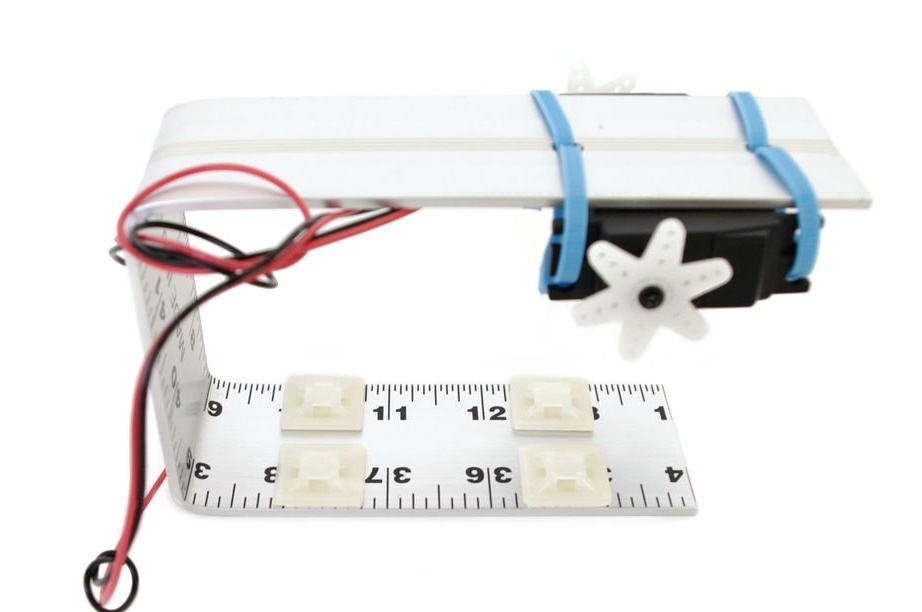
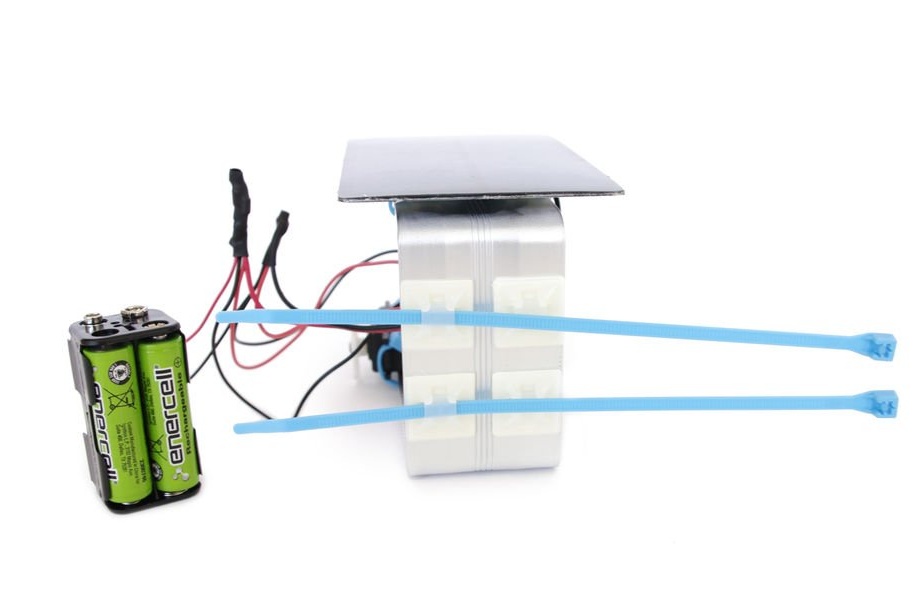
Trin 13: Og nogle flere grunde til klemmerne
Fastgør to par baser på undersiden af den U-formede buede lineal.
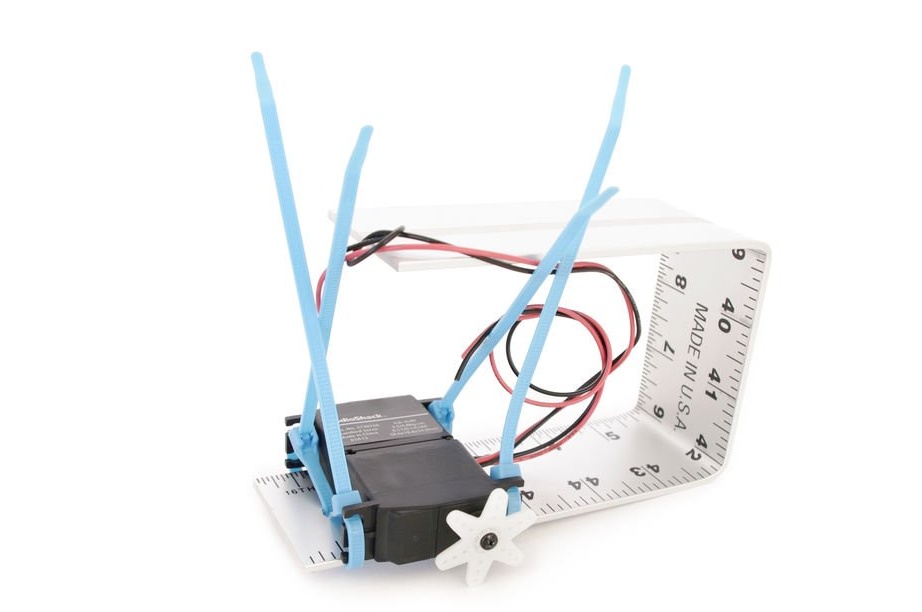
Trin 14: Sikring af batterierne
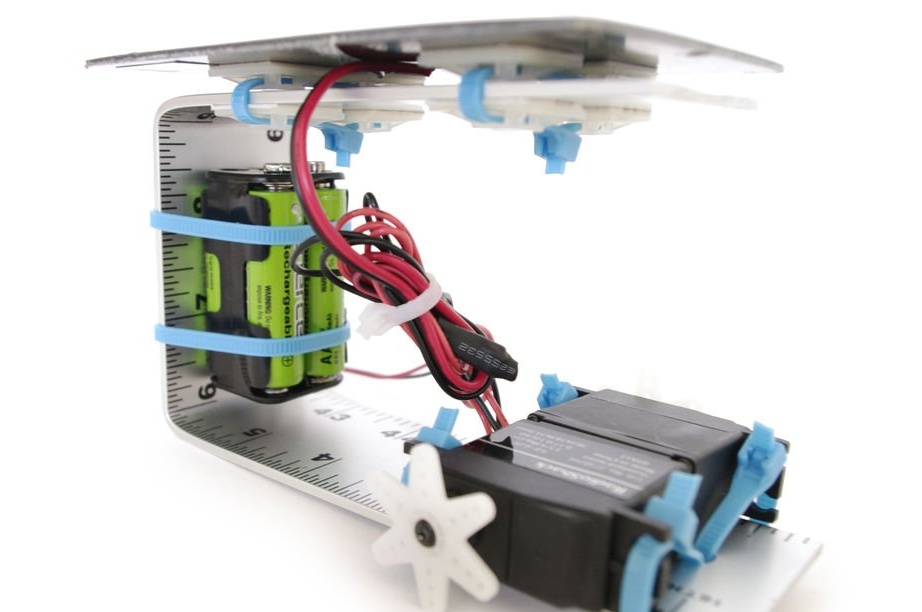
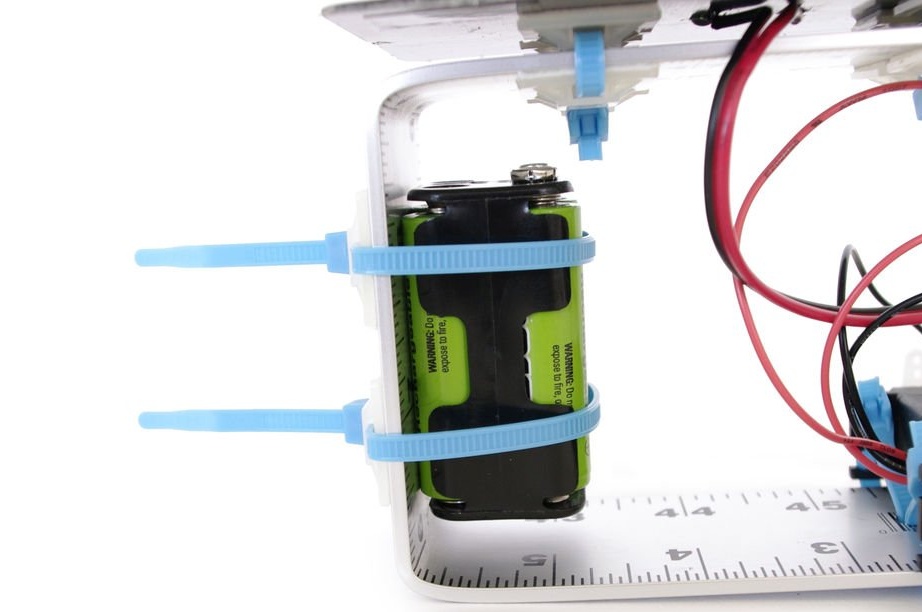
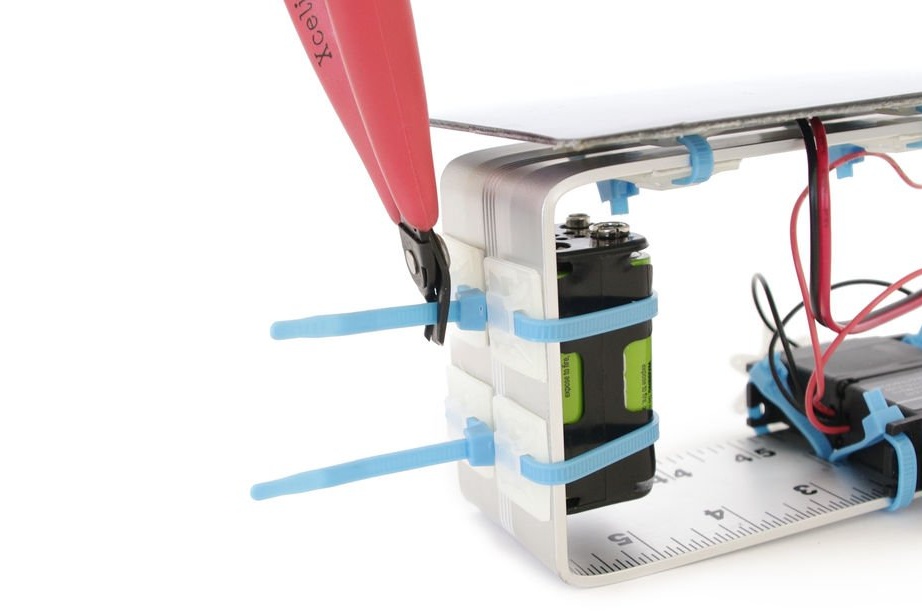
Fastgør batterierne med klemmer inden i den U-formede lineal, så de sidder fast og bevægelsesfrit på plads.
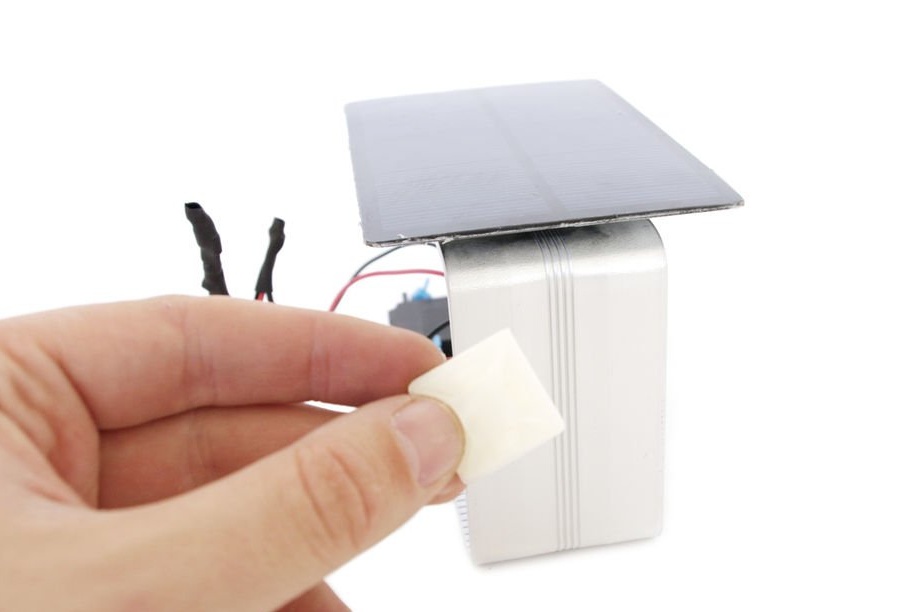
Trin 15: Trimming


Skær kroge på plastmurfæstene.
Trin 16: Hjul
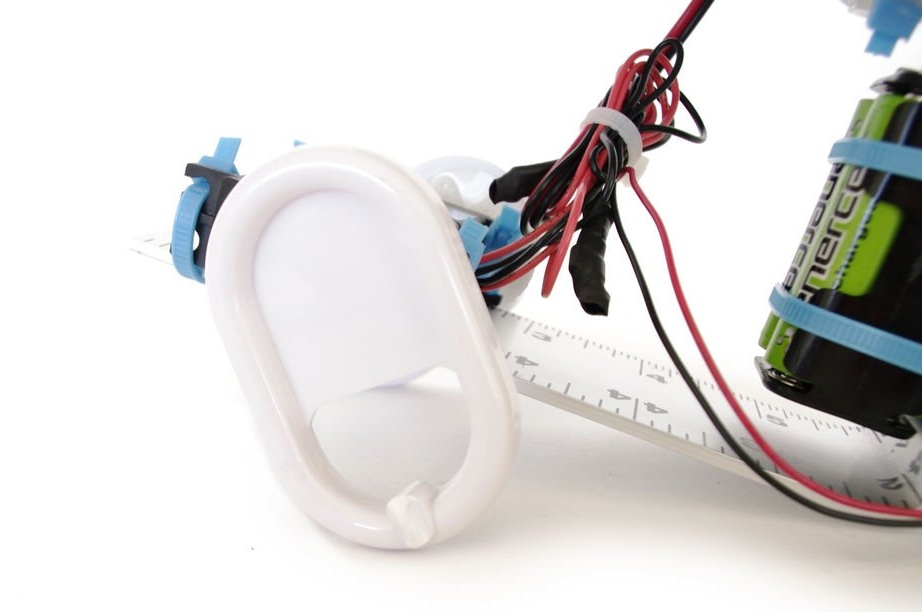
Lim vægbeslagene på servoernes ydre gear (dette vil være noget som hjul).
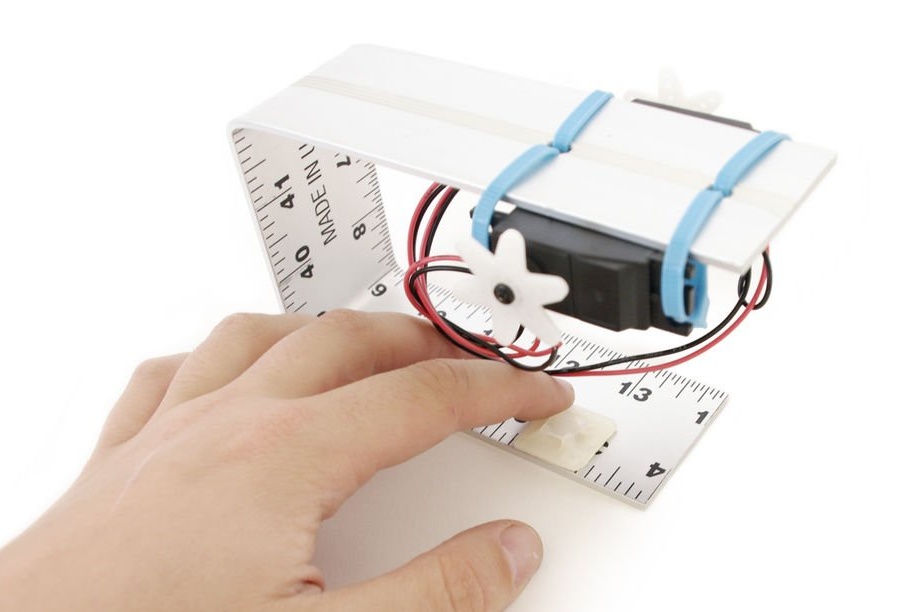
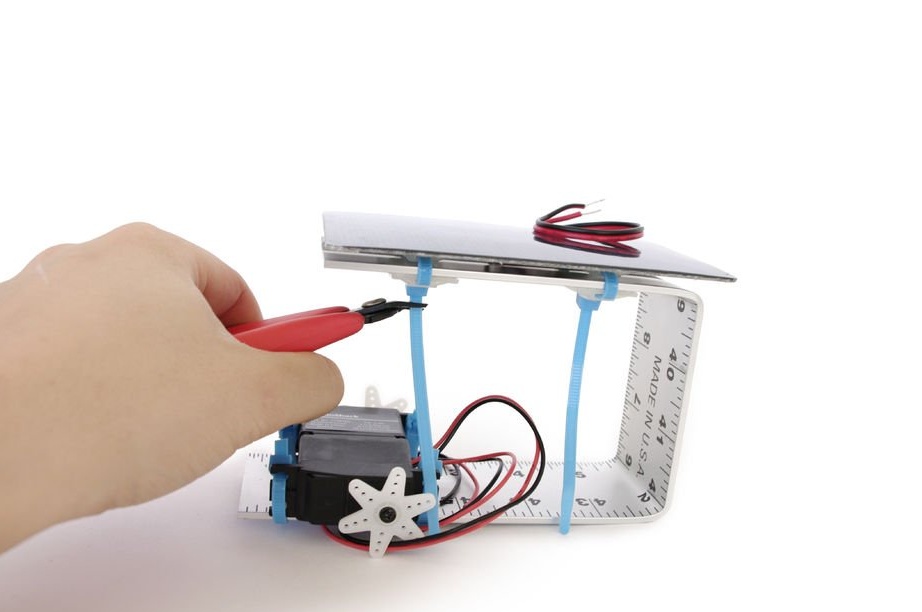
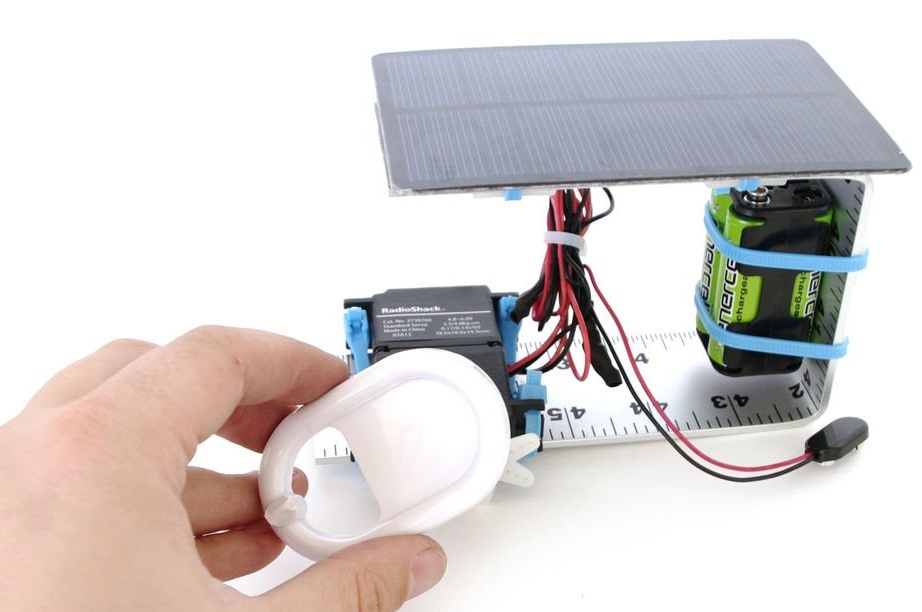
Trin 17: Tænd!

Tilslut ledningen til batteripakken, og roboten vil begynde at bevæge sig.