
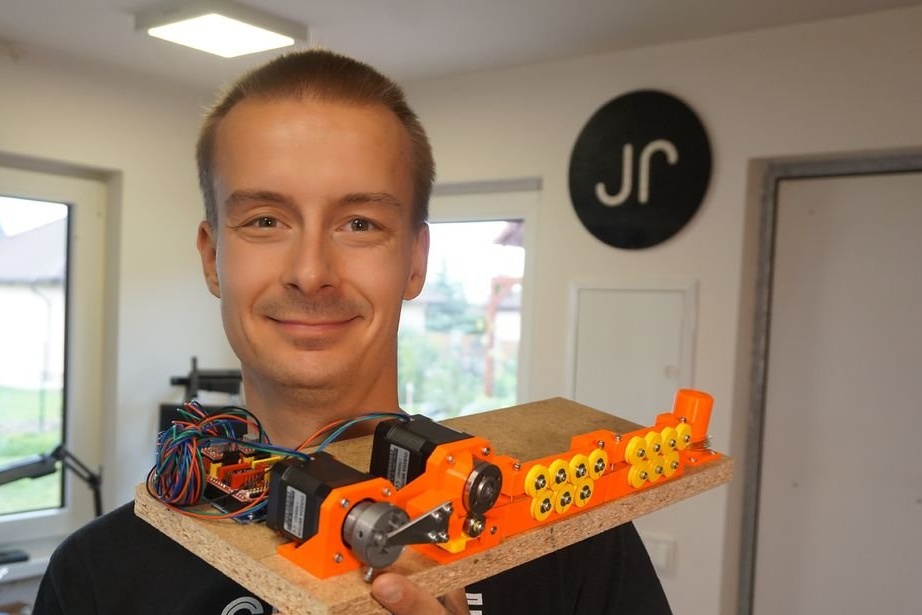
En interessant enhed blev opfundet og fremstillet af Master, dette er et apparat til bøjning af tråd af enhver form. At fremstille fjedre er en af dens funktioner. Denne maskine er i stand til at bøje 0,8 / 0,9 / 1 mm ledning i enhver 2D-form.
Hovedmålet med fremstillingen af denne maskine var at automatisere bøjningsprocessen. Andre hjemmelavede maskiner er ikke særlig nøjagtige, og deres bøjninger har en ret stor radius.
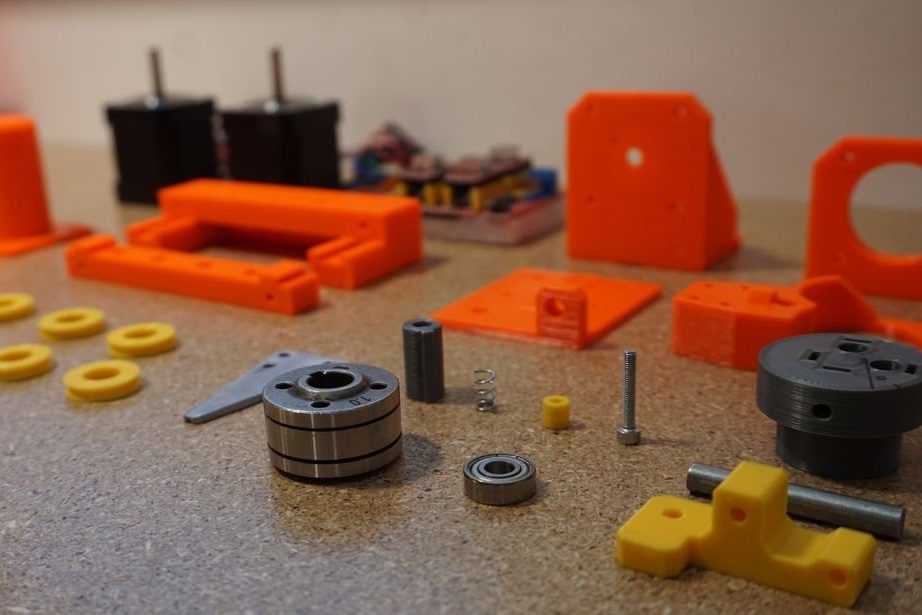
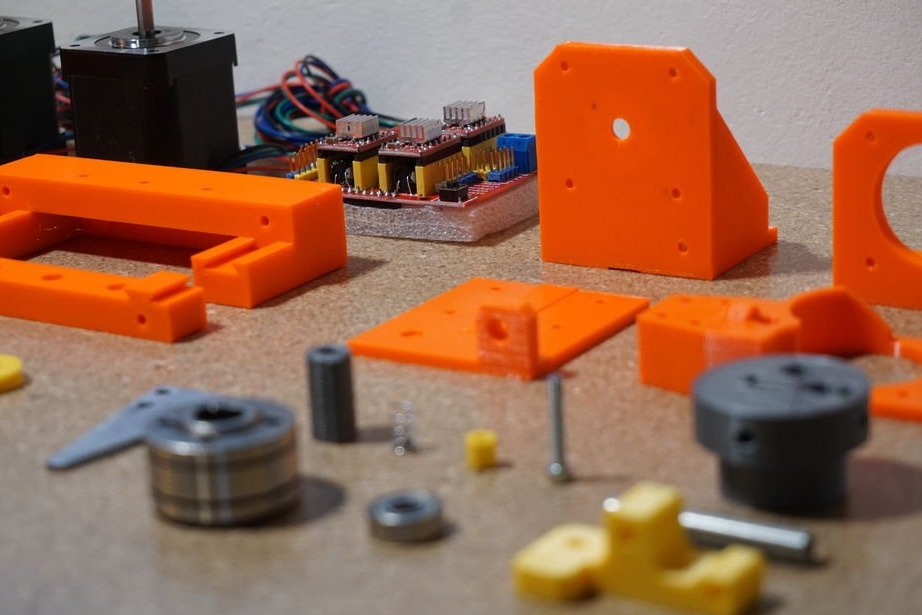
Den anden opgave var at gøre det så enkelt som muligt ved hjælp af almindeligt tilgængelige dele og komponenter. Nogle dele af maskinen er trykt på en 3D-printer, og metaldele kan købes i butikken.
Hvad er masteren til en sådan maskine til? Han er interesseret i at fremstille LED-figurer, snefnug, stjerner, blomster osv. Ved deres fremstilling er identiske dele fra tråd nødvendige, og denne maskine letter deres fremstilling.
Lad os se en kort video med et eksempel på enheden.
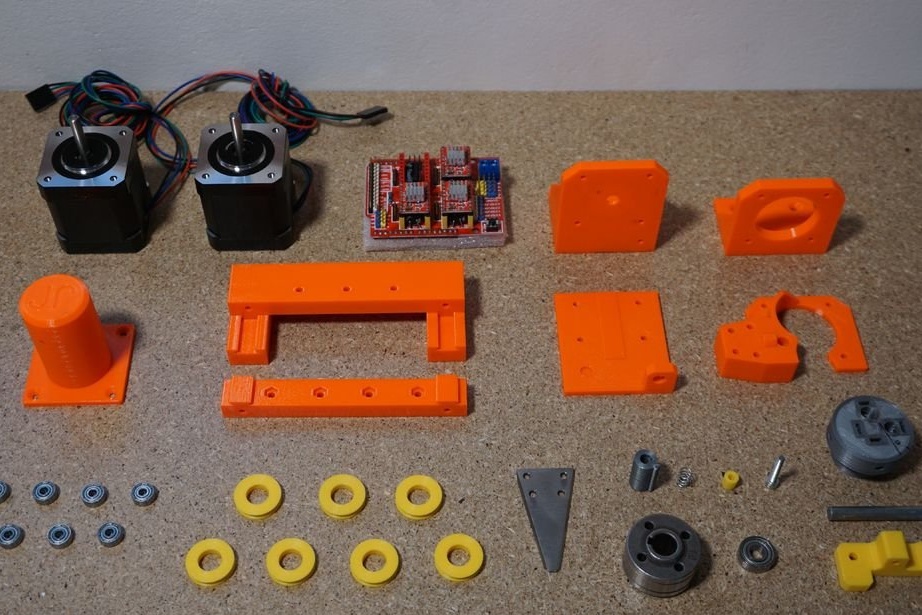
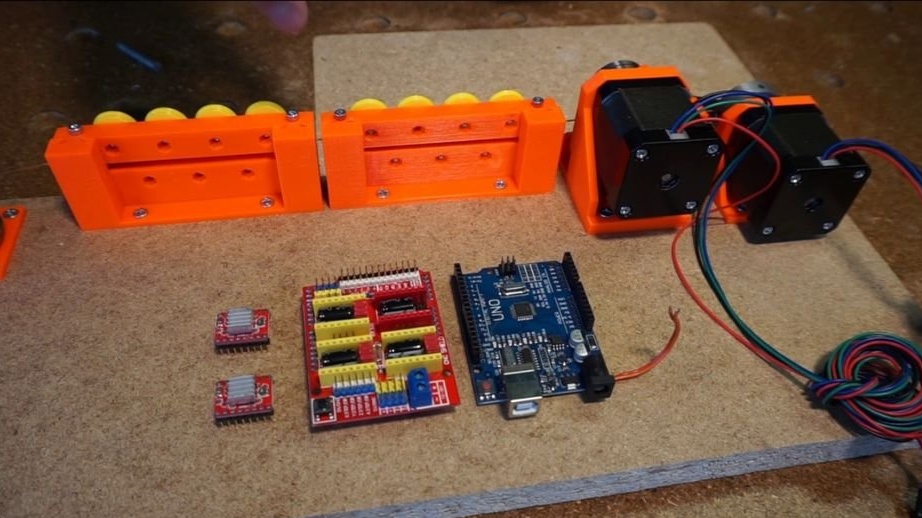
Så til fremstilling af en sådan maskine brugte masteren følgende
Værktøjer og materialer:
-3D detaljer (udskrivningsfiler kan downloades her);
-Krepezh;
-Arduino UNO;
-Expansionstavle til Arduino UNO;
-Step driver A4988 -2 stk;
-Stegmotor NEMA17 -2 stk;
-12V 3A strømforsyning;
- trådtilførselsmekanisme;
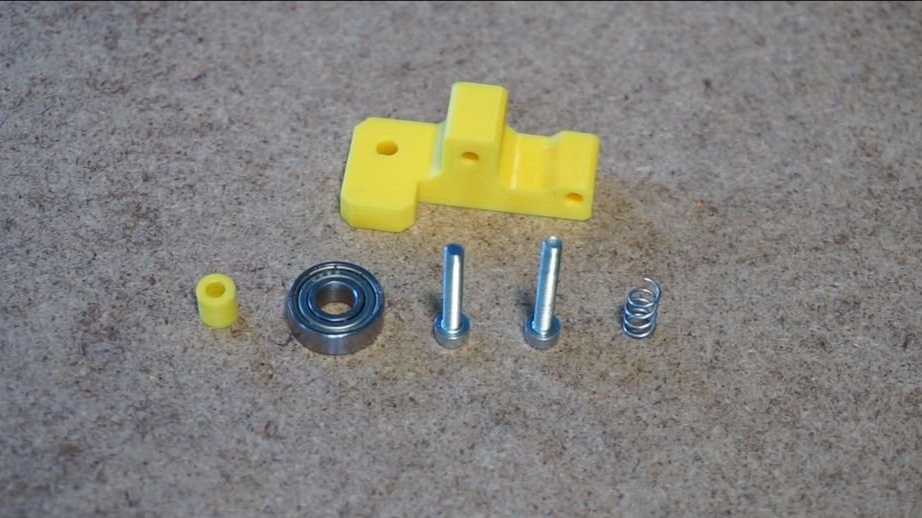
-Steelfjeder 4x6 mm;
- Leje 3x10x4 mm;
-Bearing 6x15x4 mm;
-6 mm stålstang;
- Stålplade 2 mm tyk;
-Træplade til basen 450x100 mm;
- skruetrækker;
gon;
Trin 1: Sådan fungerer det
Lad os se på, hvordan maskinen fungerer (fra højre til venstre).
Spoleholder - den holder trådspolen til behandling af maskinen.
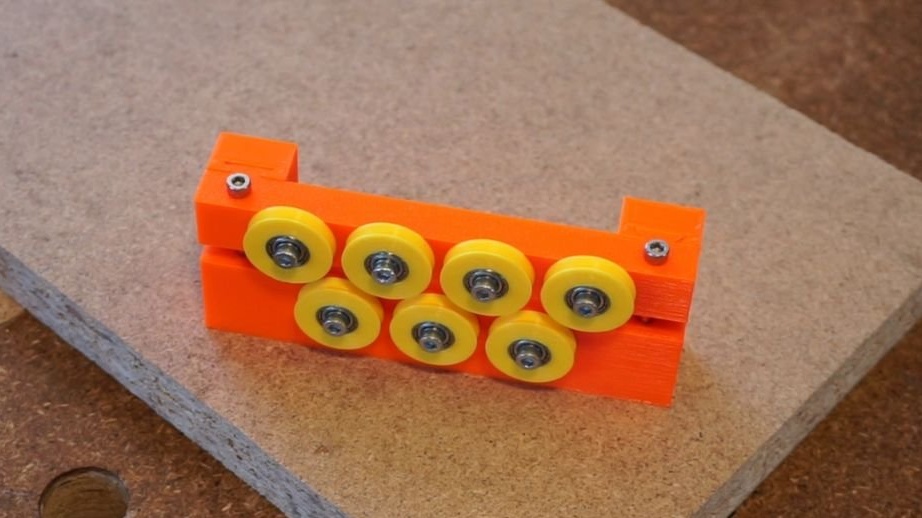
Udretter - et sæt på 7 ruller, så ledningen er så jævn som muligt. At arbejde med lige tråd er afgørende. Det er grunden til to ensretter.
Broach - du kan finde en lignende mekanisme i din 3D-printer. Et sæt gear trækker tråden fra rullen gennem rullerne og skubber den til bøjningshovedet. Fødemekanismen skal have et tilstrækkeligt ledningstryk, så det ikke glider. Mere om dette senere.
Bøjemaskine - den bøjer ledningen i en programmeret form.
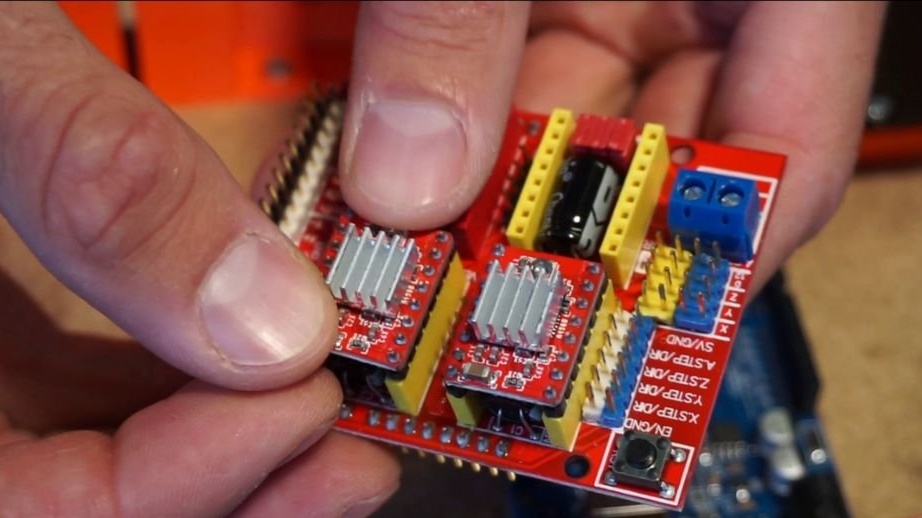
Alt dette kontrolleres af en Arduino FN med et CNC-skjold.Der sendes en kommando til Arduino fra computeren, og den oversætter dem til kommandoer til stepper-motorer.

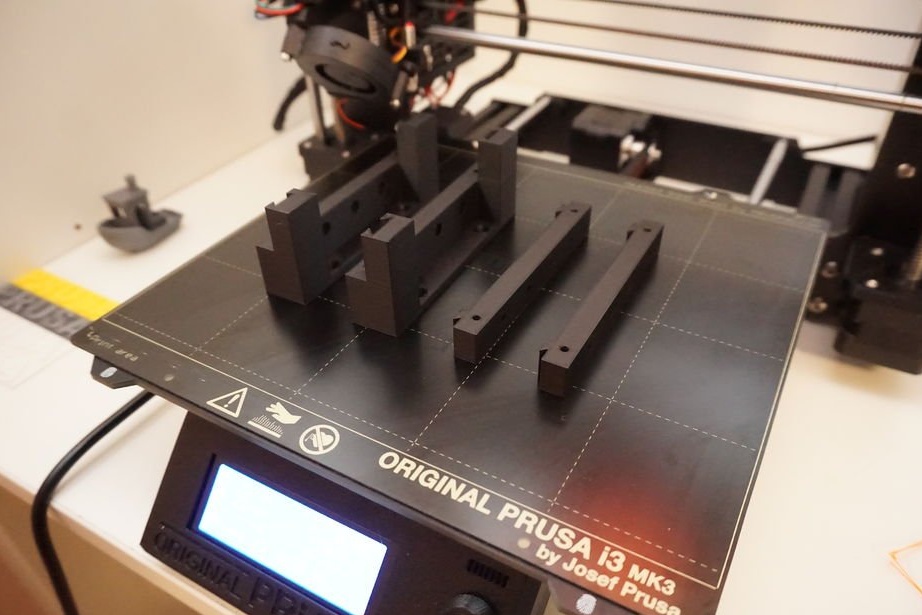
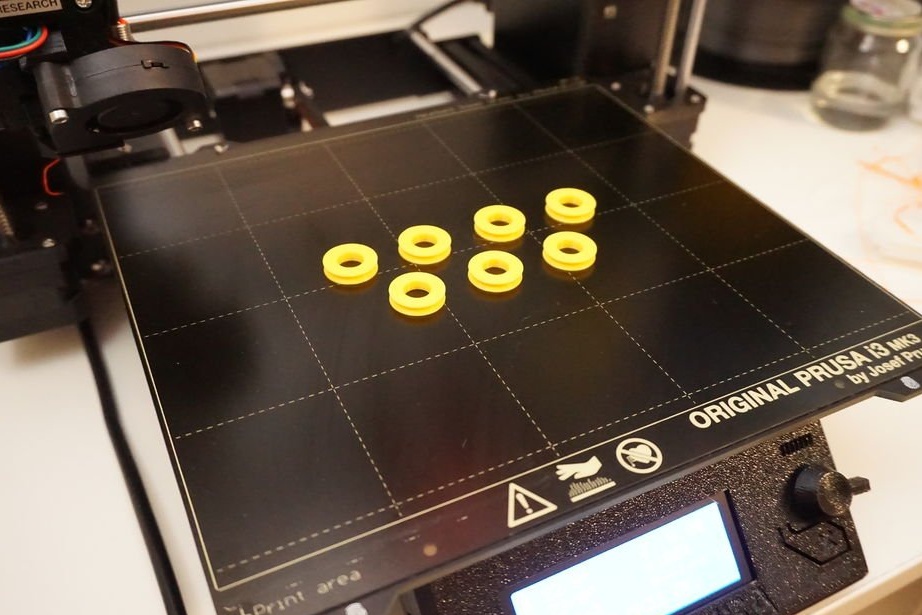
Trin to: Udskrivning af dele
Du skal udskrive følgende detaljer og i følgende mængde (for at undgå forvirring, originalteksten):
Bender
Værktøjshoved
Motorramme
Feeder
Motorramme
Bundramme
Trådguide
Tomgangsvogn
Gaffelafstandsafstand
Fodring gear afstand
Bøjeplade (skabelon)
Glatruller (2x)
Sengestativ (2x)
Top gearkarm (2x)
Rulle (14x)
Spoleholder
Lagshøjde, når du udskriver 0,15 mm. 40% fyldning. Udskrivning tager 2 dage.
Trin tre: Bøjemaskine
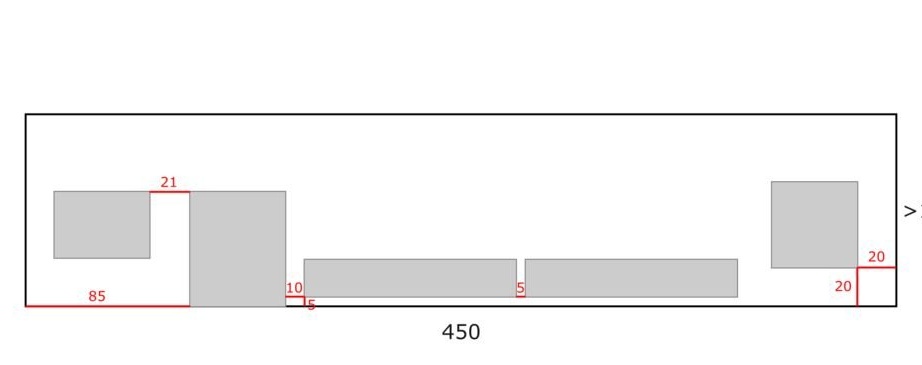
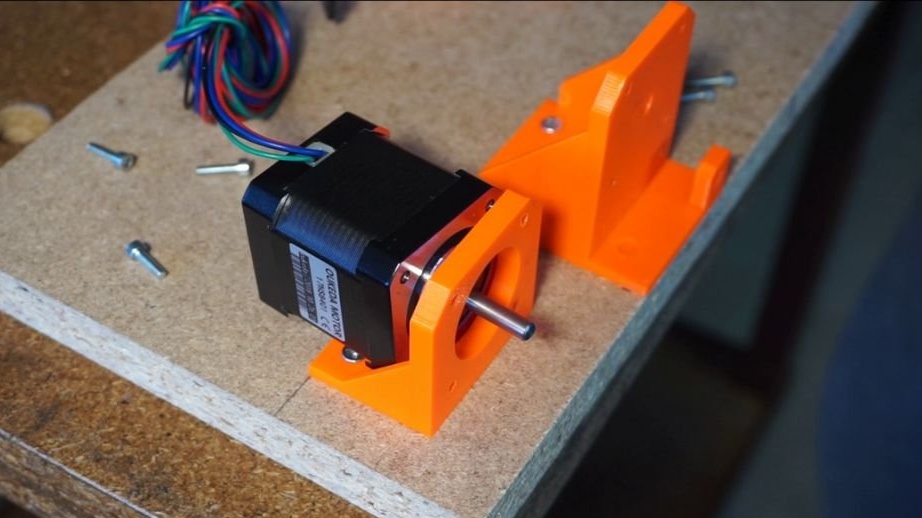
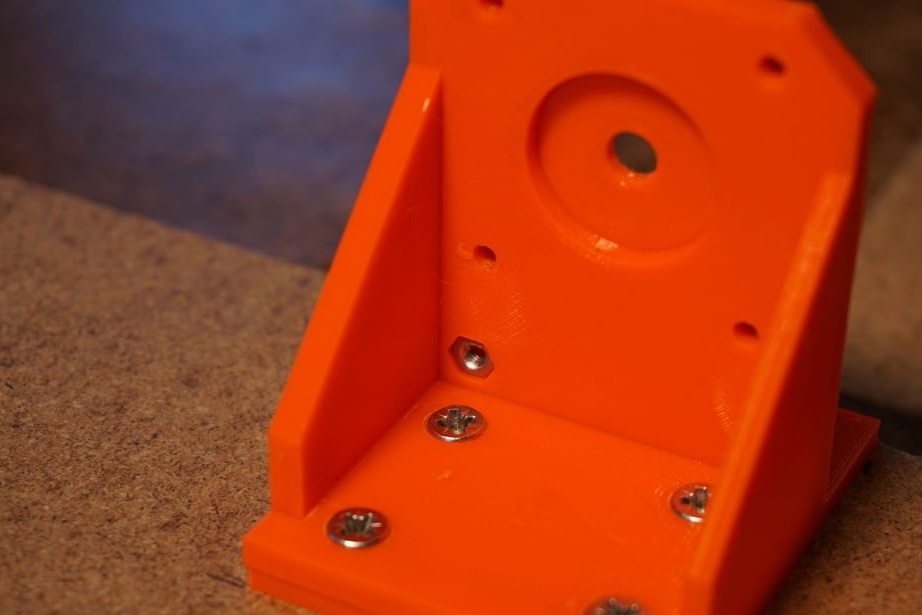
Master skruer to rammer til basen. Det er vigtigt at installere begge rammer som vist på tegningen.
Fastgør stepmotoren til rammen. Fastgør hovedet til motorakslen.


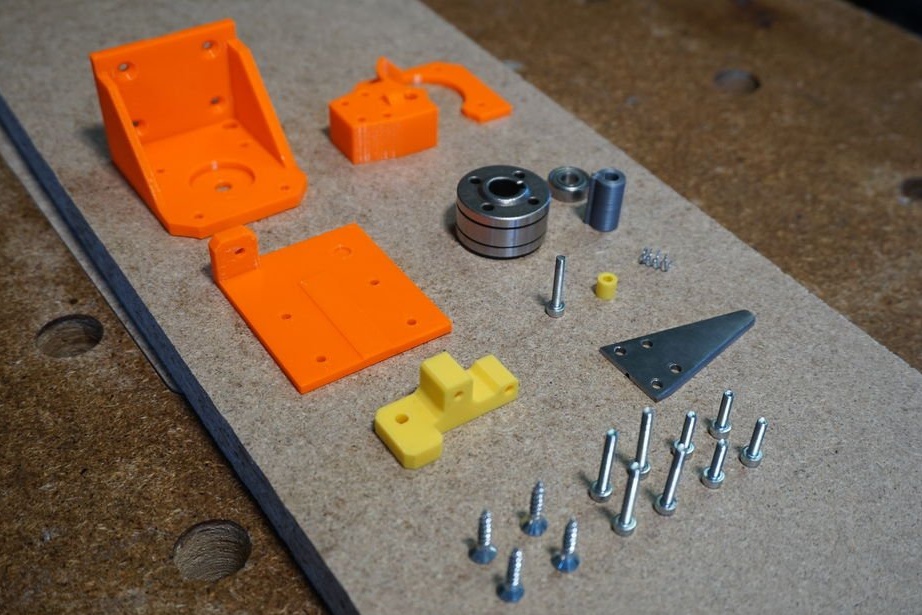
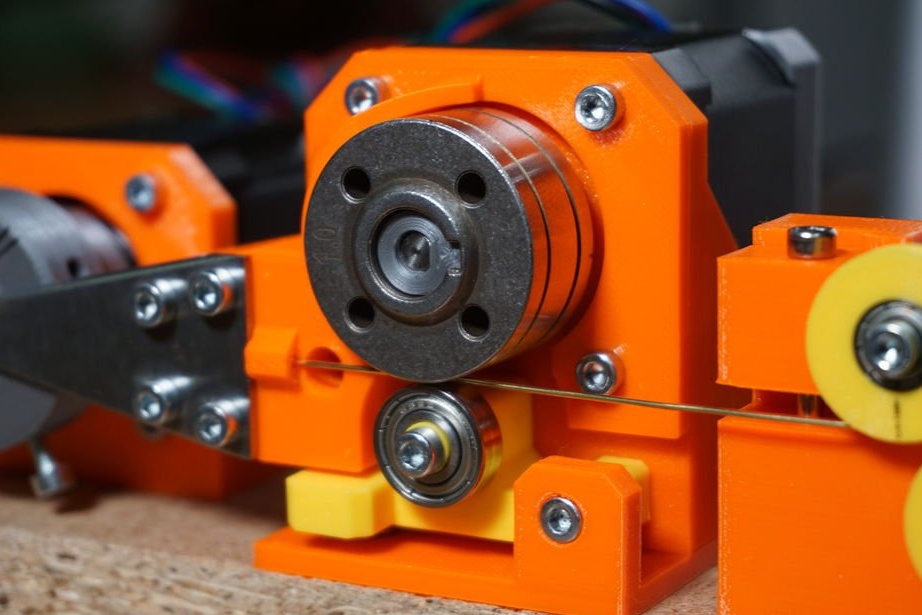
Trin fire: Broach
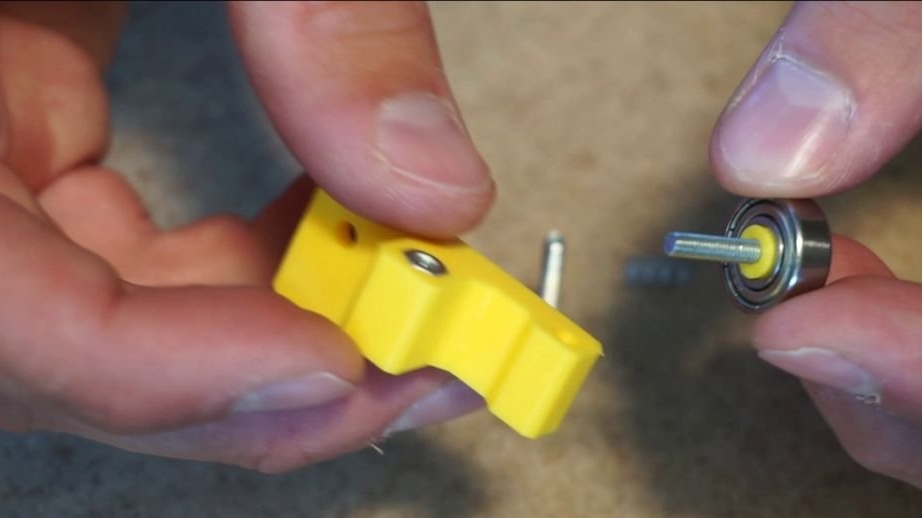
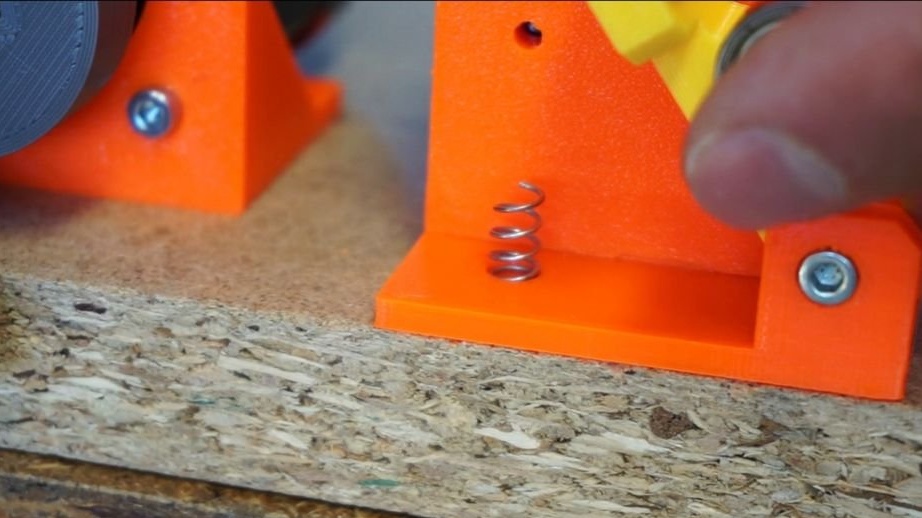
Rammen er allerede installeret, så det første trin i oprettelsen af en tilførselsmekanisme er at opbygge en vogn til mellemgearet, som vil presse tråden til fremføringsmekanismen. Fjern plastpakningen inde i 6x15x4 mm lejet. Monter lejet på M3x20-bolt. Installer M3-møtrikken i vognen og skru lejet på bolten. Sørg for, at lejet roterer frit. Indsæt den anden M3-møtrik i motorrammen (motorsiden i nederste venstre hjørne), og skru vognen gennem det lille beslag ved hjælp af M3x20-bolt. Stram ikke bolten for meget, vognen skal bevæge sig frit. Løft vognen, og indsæt fjederen i hullet under den.
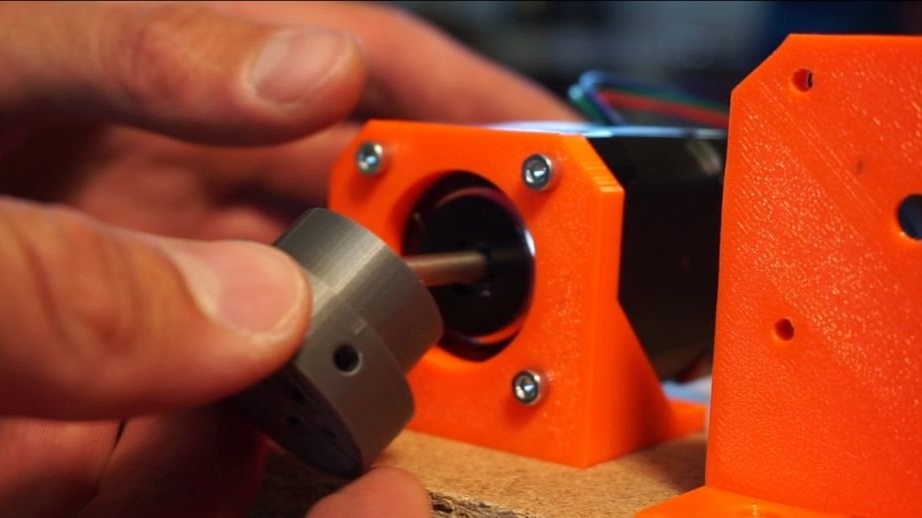
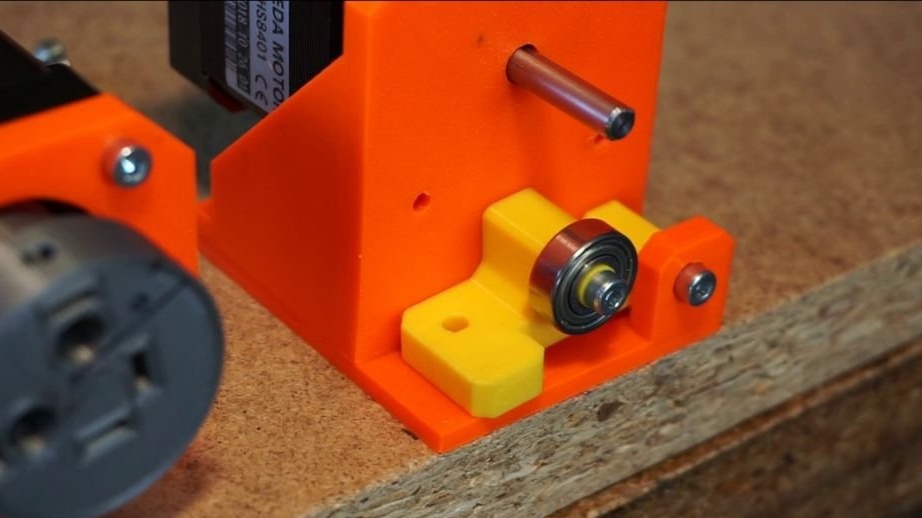
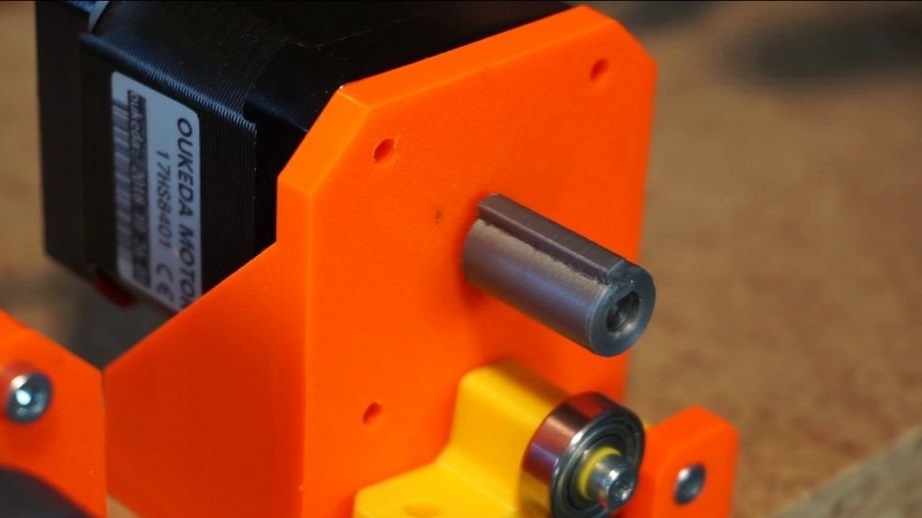
Tag den anden trinmotor, og installer den i motorrammen. Skru ikke fast endnu. Tryk afstandsstykket på tilførselsmekanismen til motorakslen, og installer tilførselsmekanismen.
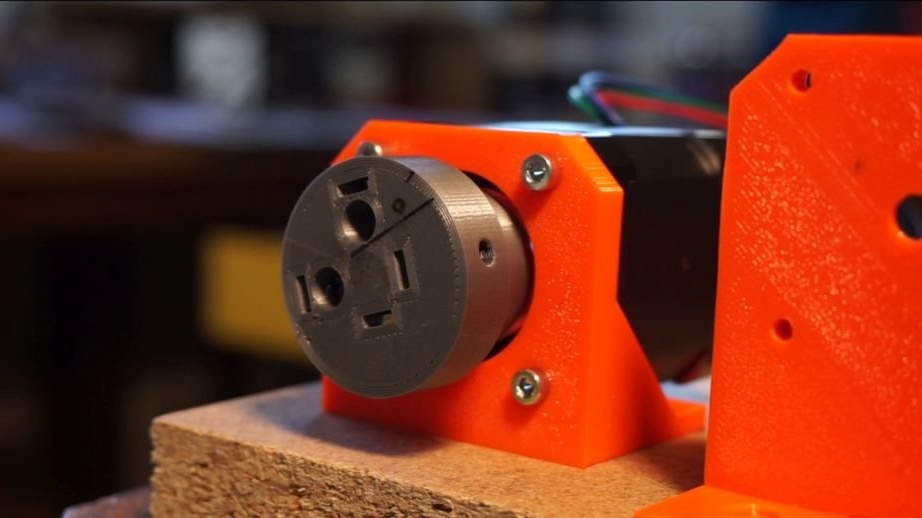
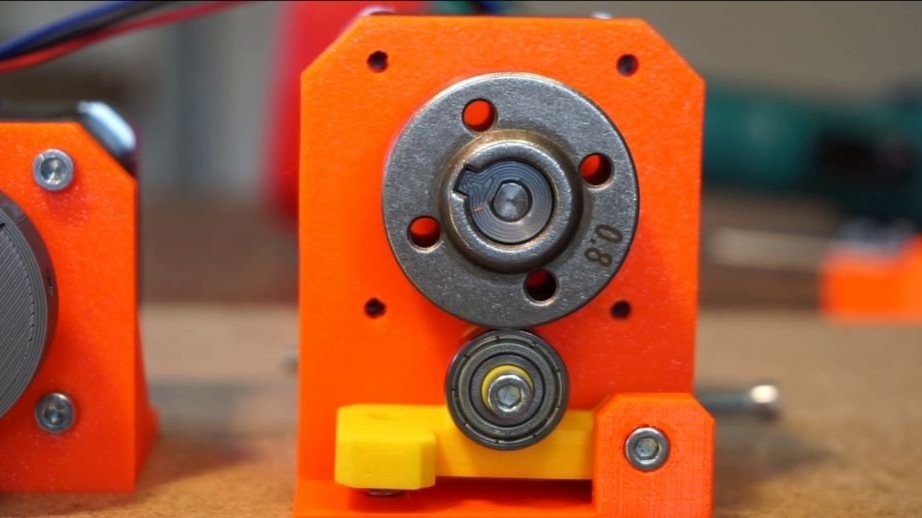
Den tilførselsmekanisme, som masteren bruger, er hentet fra en MIG-svejsemaskine. Mekanismen har to udsparinger på spolen. Én til 0,8 mm ledning og en til 1 mm ledning. I modsætning til gear (tidligere forsøgte skibsføreren at fodre wiren med dem), efterlader denne mekanisme ikke mærker på wiren.
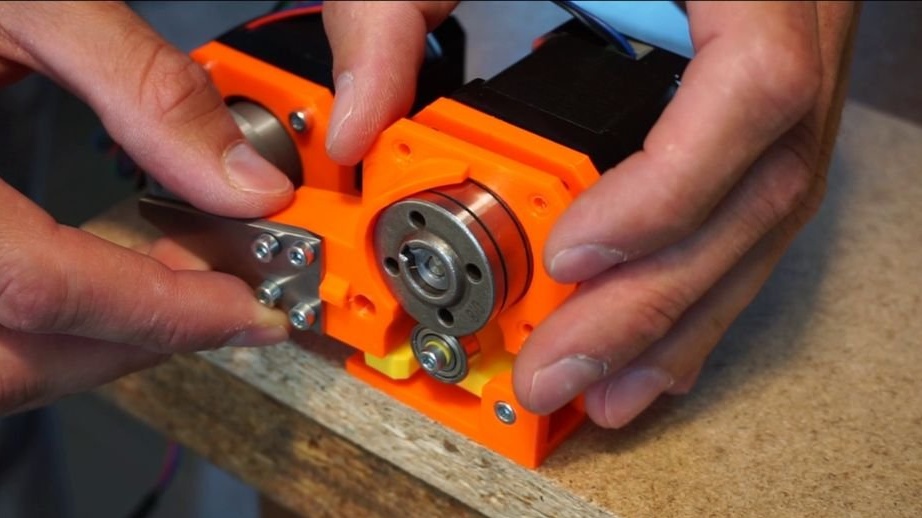
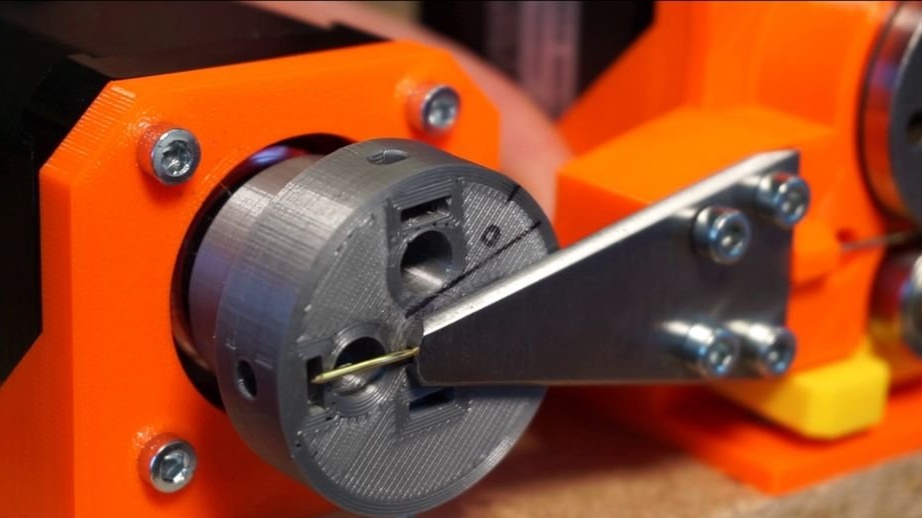
Føderen og bøjeanordningen er forbundet med en bøjningsplade - en 2 mm tyk metalplade med en lille rille på bagvæggen, der fører ledningen direkte til midten af bøjningshovedet for perfekt bøjning. Til udskrivning er der en plastisk bøjningsplade, der fungerer godt, men slides hurtigt og kræver hyppig udskiftning. Du kan bruge den, eller du kan lave en metalplade på den.
Derefter skal du tage plastikdelen af trådstyret og installere de fire M3-møtrikker i hullerne på bagsiden. Skru nu bøjningspladen med M3x20-boltene. Placer ledestyret foran motorrammen på tilførselsmekanismen, og fastgør den til motoren med fire M3x12-bolte. Juster bøjningspladens position. Det skal være nøjagtigt i midten af bøjningshovedet.
Broach er klar. Hvis du har en lige tråd, kan du bruge ledningen lige nu. Ellers har du brug for en ensretter.





Trin fem: Broach
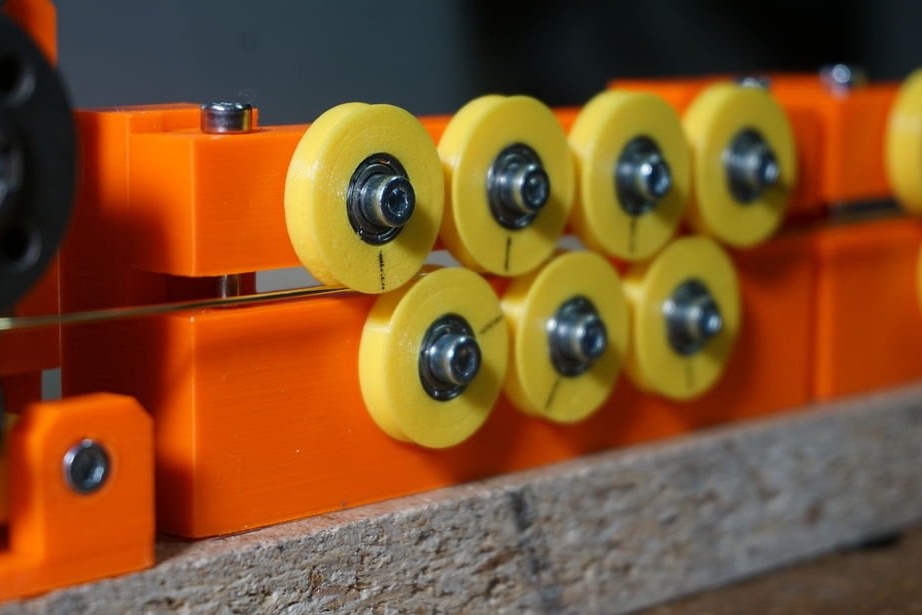
Tråden leveres normalt i spiralform. For at bøje ledningen skal du først rette den. Udligeren består af 7 ruller (4 på toppen og 3 i bunden), som kan presses mod hinanden for at sikre den rigtige spænding af tråden. Det forhindrer også, at ledningen drejes under bøjning.
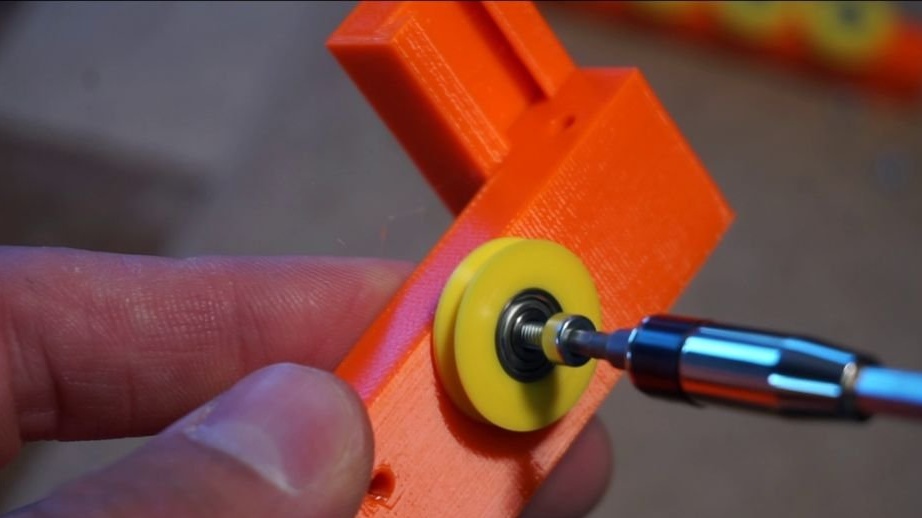
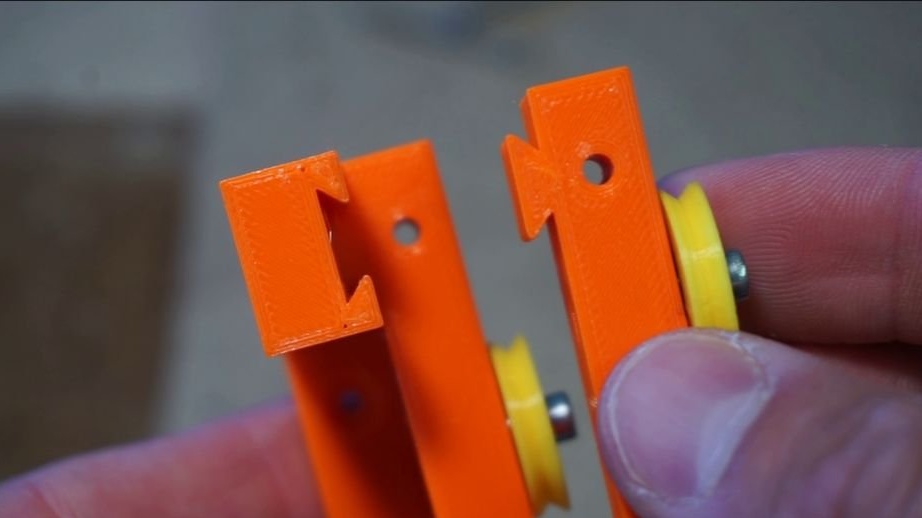
Start samlingen med rullehjulene. Først skal du trykke lejet 3x10x4 mm ind i plastrullehuset. Indsæt M3x12-bolt på den ene side og M3-skiven på den anden side af rullen. Skiven forhindrer friktion af hjulet på rammen. Skru alle ruller til den nedre og øverste ramme. Tilslut begge rammer. Fastgør rammene med to M3x40-bolte.
Du kan spare nogle penge på rullelejer. Udskriv Straightener_RollerNoBearing-delen i stedet for Straightener_Roller. Men ydeevnen bliver lidt dårligere.
For endnu bedre resultater skal du bruge 2 glattejern i træk.




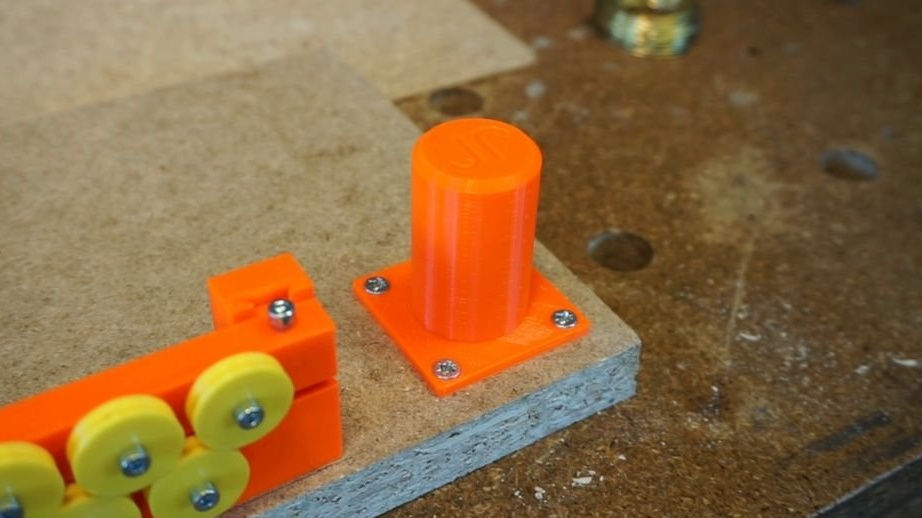
Trin seks: spiralholder
Spoleholderen er en simpel cylinder, der holder ledningen og giver den mulighed for at slappe af fra spolen. Skru den fast til basen med fire 3x16 skruer.
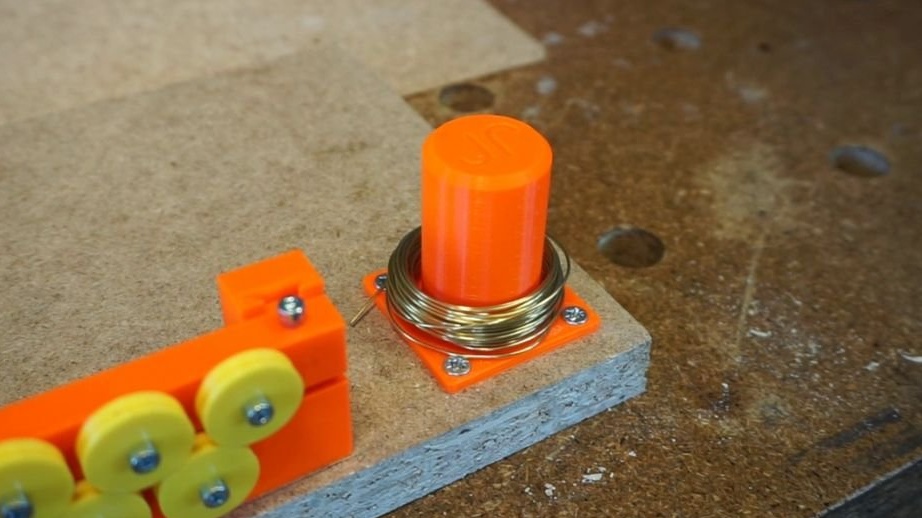
Trin syv: forbind
Først skal bøjningskabelen føres til maskinen. Skibsføreren bruger 0,8-1 mm messingtråd i form af en spole.
Tråden går fra spolen gennem rullerne. Bare sæt wiren mellem rullerne. Så går hun gennem broch.Juster fremføringsmekanismens placering, så tagren er i flugt med overfladen på trådstyret. Tryk på håndtaget i mellemgearet, og skub ledningen gennem feederen til bøjningspladen. Slip håndtaget, og lad det presse mod fremføringsmekanismen. Du kan nu rulle fremføringsmekanismen manuelt for at skubbe ledningen til bøjningshovedet. Juster forsigtigt spændingen på ruller ved at stramme boltene. Rullerne skal ikke dreje frit, men tråden skal bevæge sig jævnt.
For det andet, elektronik Styringen skal også være tilsluttet. Skibsføreren bruger den klassiske Arduino UNO med CNC og to A4988 steppermotordrivere. Tilførselsmotoren er tilsluttet Z-aksen og bøjningshovedmotoren til X-aksen. Driverne er konfigureret til den højest mulige nøjagtighed - alle 3 springere under trinndriverne indsættes. Alt skal tilsluttes en 12V 3A strømforsyning.

Trin otte: Firmware
Nu kan du prøve at starte maskinen. Master bruger GRBL sammen med cncjs. De er designet til at arbejde på en fræsemaskine, men fungerer godt til enhver type CNC. GRBL er den firmware, du har brug for at installere i Arduino UNO. Der er en god cncjs-webklient til indstilling af parametre. Installer GRBL på Arduino og cncjs på din computer.
Efter installationen skal du oprette forbindelse til maskinen og kontrollere dens funktion ved at trykke på knapperne Z +/- eller X +/-.
Nu skal du kalibrere: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Dette er et sæt værdier, der bestemmer, hvordan det nummer, der er angivet i koden, skal konverteres til motorbevægelse. For eksempel, hvis du indstiller Z-aksen til 30, betyder det faktisk, at han skubber 30 mm ledning gennem feederen.
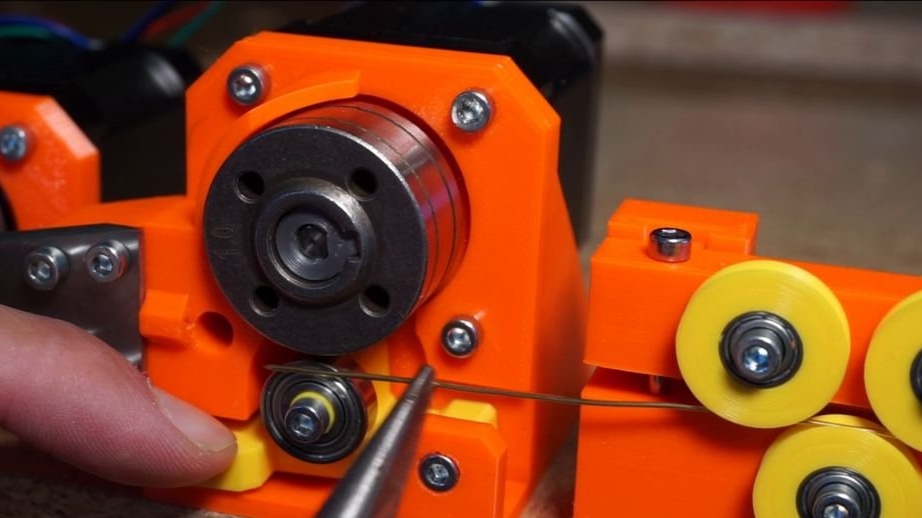
Vi regnede ud med kalibreringen, nu skal du indstille bøjningshovedet til nulstilling.
Bevægelsen af bøjningshovedet bestemmes af den velkendte faste position af bøjningshovedet. I dette tilfælde er dette den position, hvor bøjningstappen på hovedet vender mod venstre. Se billedet.
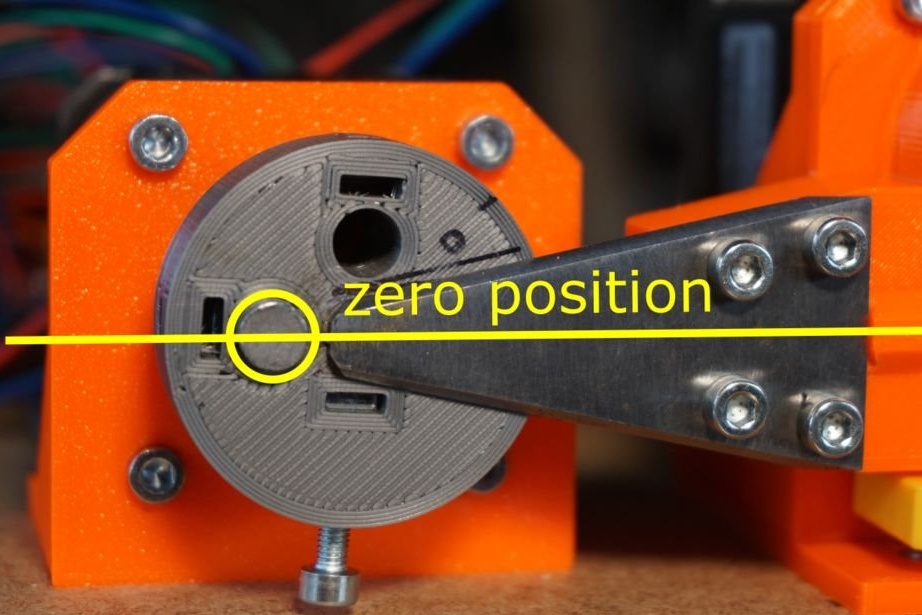
Det tilrådes at bemærke denne nul position på hovedet for at være i stand til at vende tilbage til den samme position. Der er ikke behov for tilførselsmekanismen for at bestemme nulstillingen, fordi den altid bevæger sig i forhold til den aktuelle position.
Lad os nu se på et Gcode-eksempel. Det ser sådan ud:
G91
G1 Z1
G90
G1 X2
G1 X-6Og her er hvad hver værdi er skrevet til:
G91 - brug relative koordinater (kræves inden bevægelse langs Z-aksen)
G1 Z1 - tilfør 1 mm ledning
G90 - brug absolutte koordinater (kræves inden bevægelse langs X-aksen)
G1 X2 - drej bøjningshovedet til position 2 (dette nummer har ikke enheder)
G1 X-6 - drej bøjningshovedet til position -6
Hvis du gentager trinene 100 gange, får du en fjederbøjningskode. Flere kildefiler kan findes nedenfor.
hex-inner.gcode
hex-outer.gcode
spring.gcode
Maskinen er klar. Men mesteren vil stadig arbejde på at forbedre det.
Hele processen med fremstilling af en sådan maskine kan ses i videoen.