


I denne artikel viser guiden os, hvordan han lavede den fungerende Lego 60193 Arctic Air Transport-helikopter modellen quadrocopter. Hovedopgaven ved fremstilling af quadrocopter ud over flyveegenskaber var at gemme så mange originale dele som muligt.
Lad os se en kort video, der demonstrerer funktionen af quadrocopter.
Så til fremstilling af en sådan quadrocopter brugte mesteren følgende
Værktøjer og materialer:
-LEGO City Arctic Helicopter - 60193:
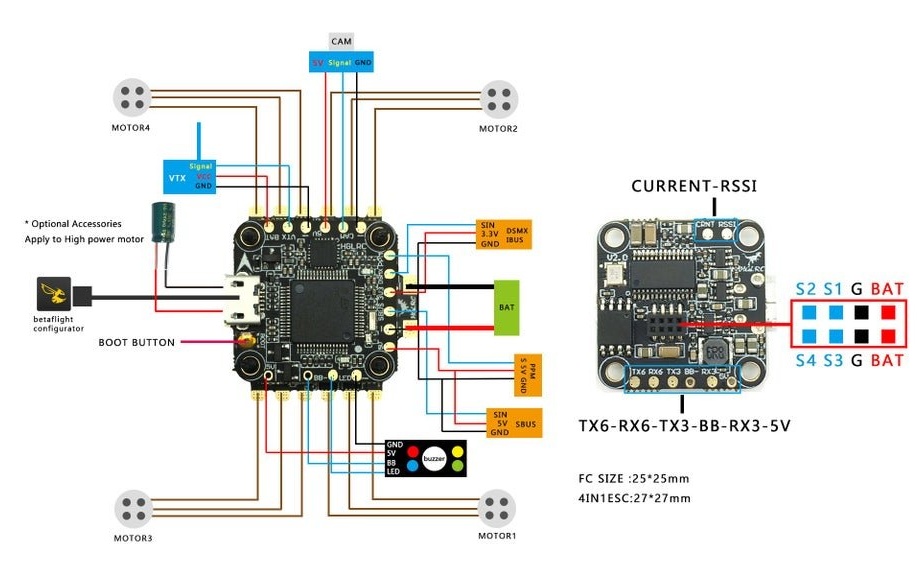
- Controller og ESC 20x20 mm, for eksempel HGLRC XJB F428 Micro F4 AIO OSD;
- Børsteløse motorer - 4 stk;
-Propellery;
-Batteri 950 mAh;
-Razemy;
seeing-;
-Radio-modul (sender og modtager);
-Krepezh;
-Nozh;
Loddejern;
-Limpistol;
- skruetrækker;
-Drel;
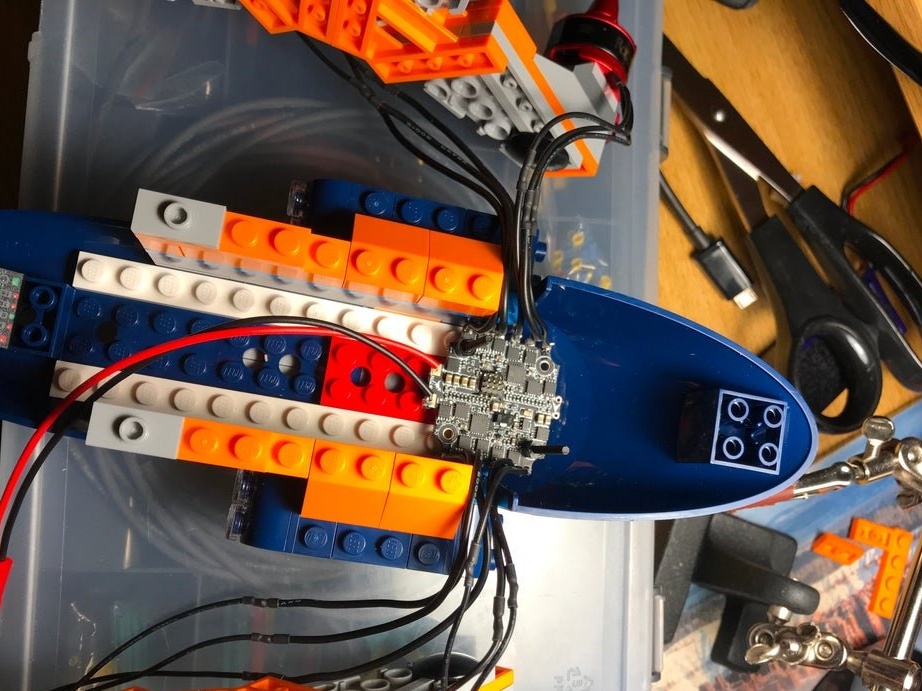
Trin 1: Lego Build
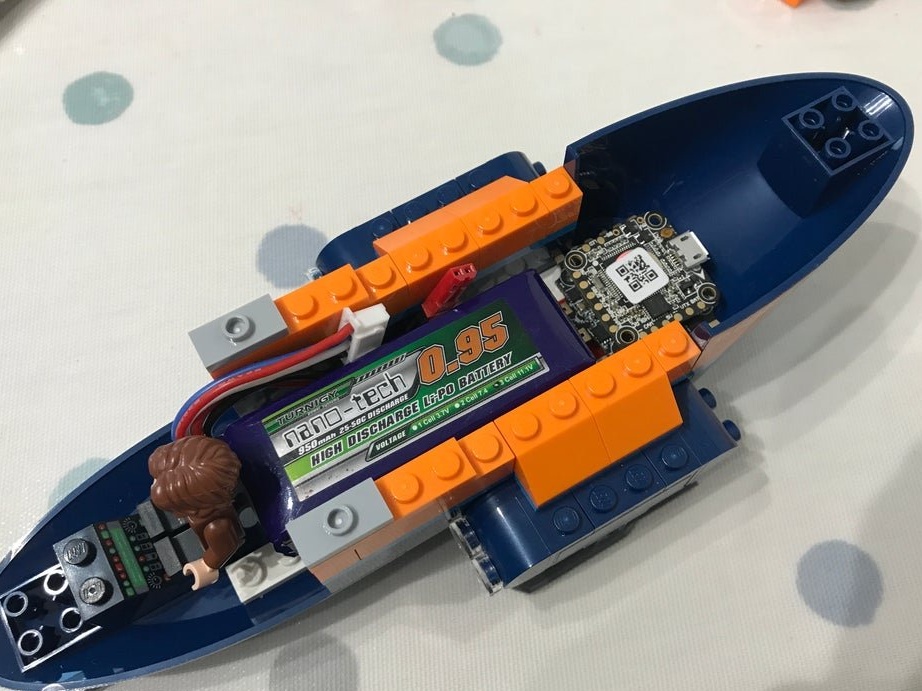
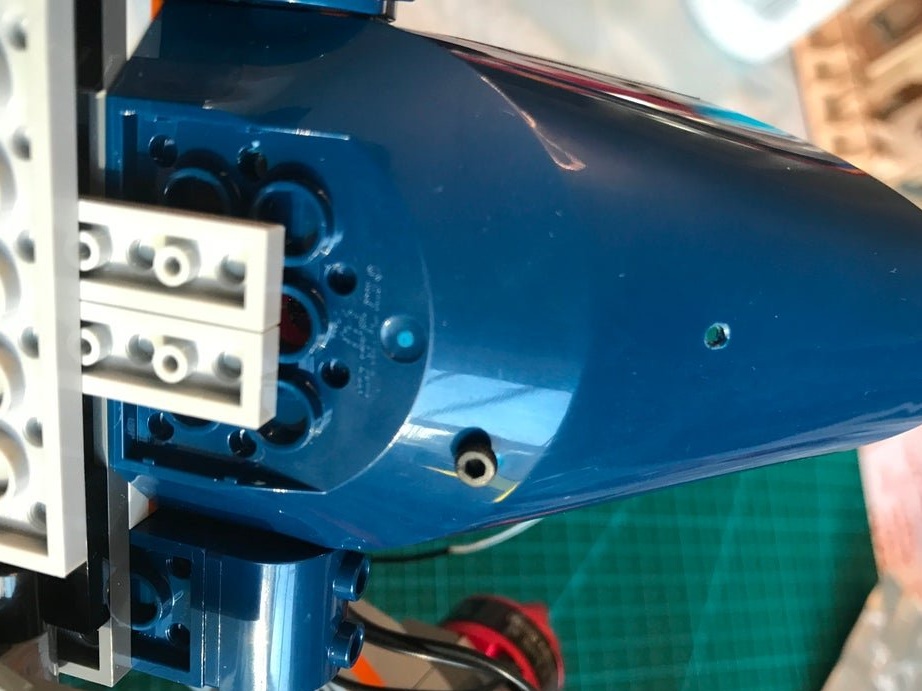
Først indsamler mesteren LEGO-Arctic. Derefter er modellen delvist adskilt. Indvendigt skal du placere batteriet og controlleren under overholdelse af modelens balance.


Trin to: Motorophæng
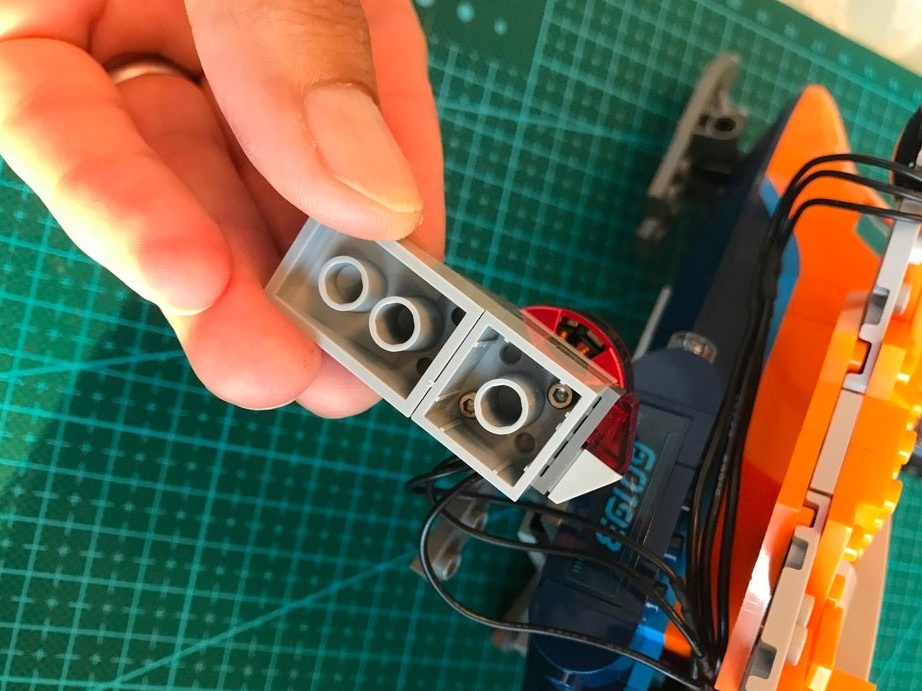
Monteringshullerne til den almindelige 1806 børsteløse motor er stort set de samme som stifterne på standard LEGO 2x2-pladen. Hver “motor” -montering på quadrocopter har en 2x2 mørkegrå flise (LEGO 3022) og en 2x2 lysegrå flise med en lodret stift (LEGO 2460), som normalt holdes på navene i en LEGO-propel på toppen.
Skibsføreren borer monteringshullerne. På motorer er der i midten et lavvande. Et hul under det bores i midten af flisen. Sikrer motorer.








Trin tre: Skuldre
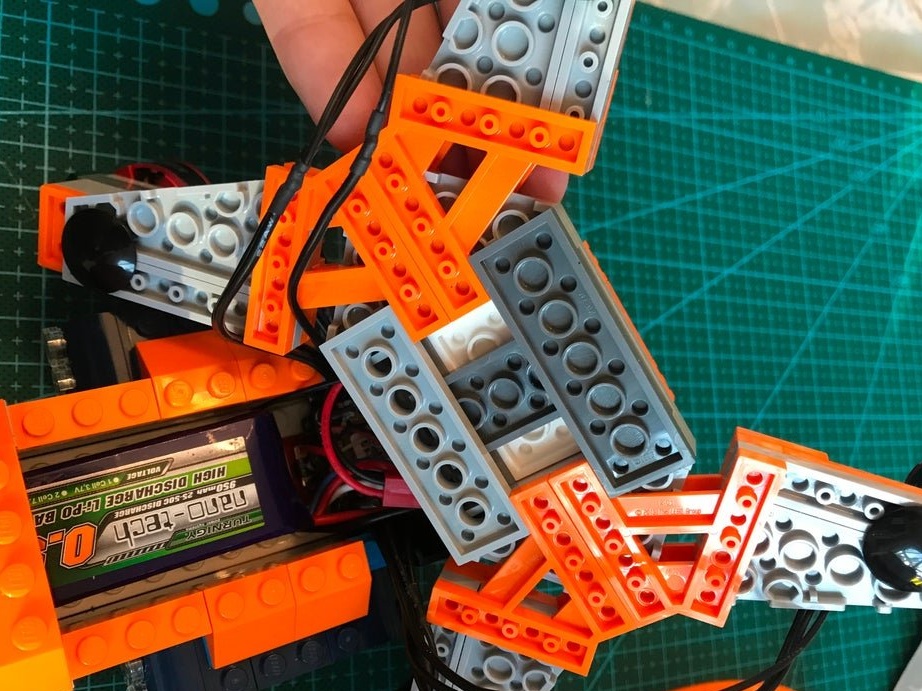
Omarrangering af “skuldrene” på quadrocopter, kan du ændre layoutet lidt for at give et bredere eller smallere arrangement af motorerne og placeringen af skruerne i forhold til hinanden.
Standard LEGO-enheden (første foto) har ”skuldre” og motorer placeret bredt (vandret) med en ret stor skrueoverlapning. Skibsføreren genindarbejder “skuldrene” og kaster motoren og dermed skruerne.



Trin fire: elektronik
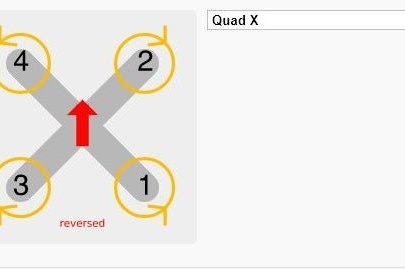
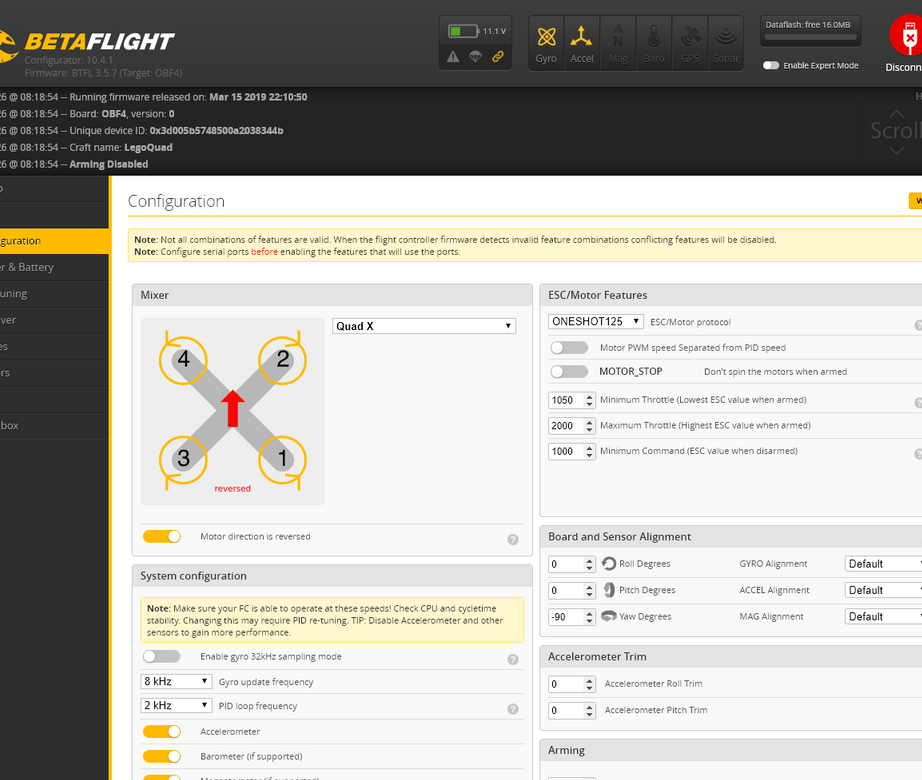
I henhold til ordningen installerer det elektronik. Det første foto viser et diagram over motorernes rotationsretning. Rotationsretningen kan også ændres i programmeringsfasen.

Når installationen er afsluttet, og inden batteriet tilsluttes, kontrollerer guiden forbindelserne for at forhindre brud eller kortslutning.
Når du tænder for strømmen, skal du se lysene på flyvemaskine og et par bip fra ESC.
Trin fem: Opsætning
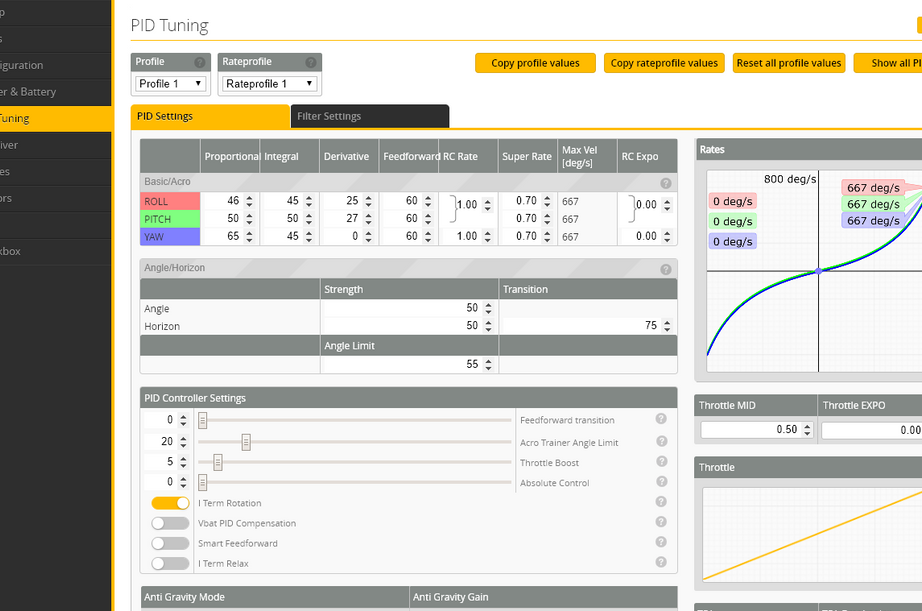
Nu hvor alt er tilsluttet, er det tid til at konfigurere controlleren.Dette betyder at downloade software (firmware), der udfører opgaven med at afkode styresignalerne fra RC-senderen, behandle sensorindgangssignalet (accelerator, gyroskoper) og tilvejebringe styresignaler til ESC til at rotere motorerne med en given hastighed.
Fjern propellerne for sikkerhed! Der kræves ikke et batteri til de første par installationstrin, kun USB-strøm.
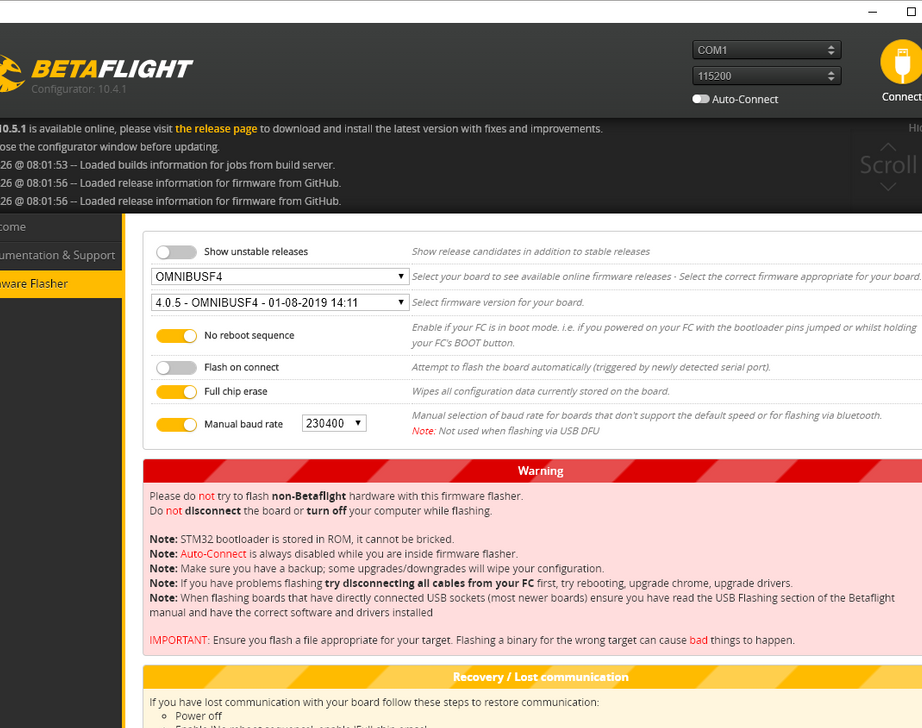
Download Betakonfigurator
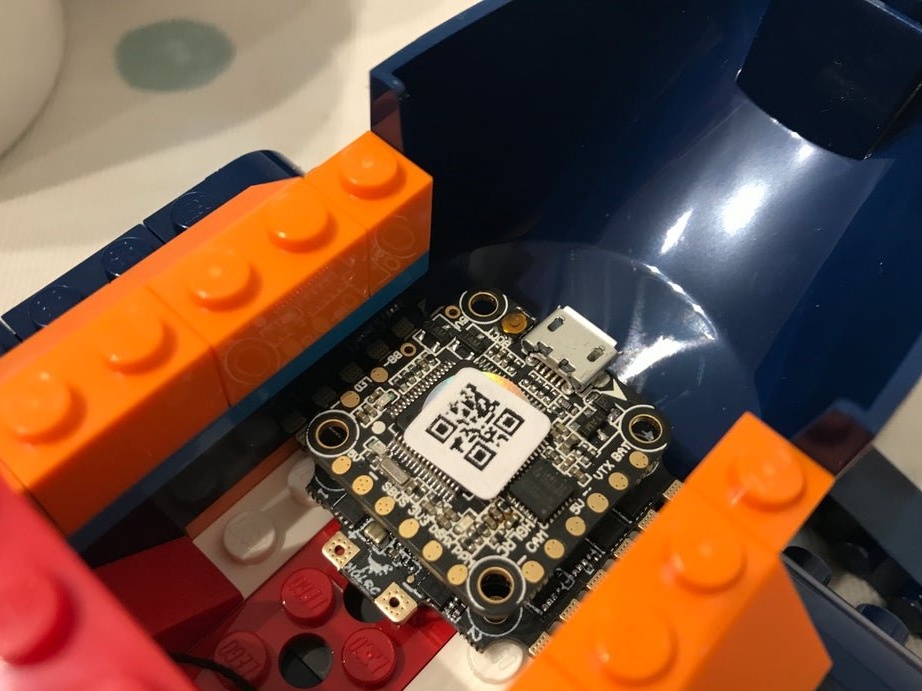
Tilslut micro USB-kablet til flyvemaskine. Bemærk, at dette kan være lettere at gøre, hvis controlleren ikke er skruet fast i chassiset.
Download og upload den relevante firmware til flyvemaskine.
betaflight-settings-legoquad.txt
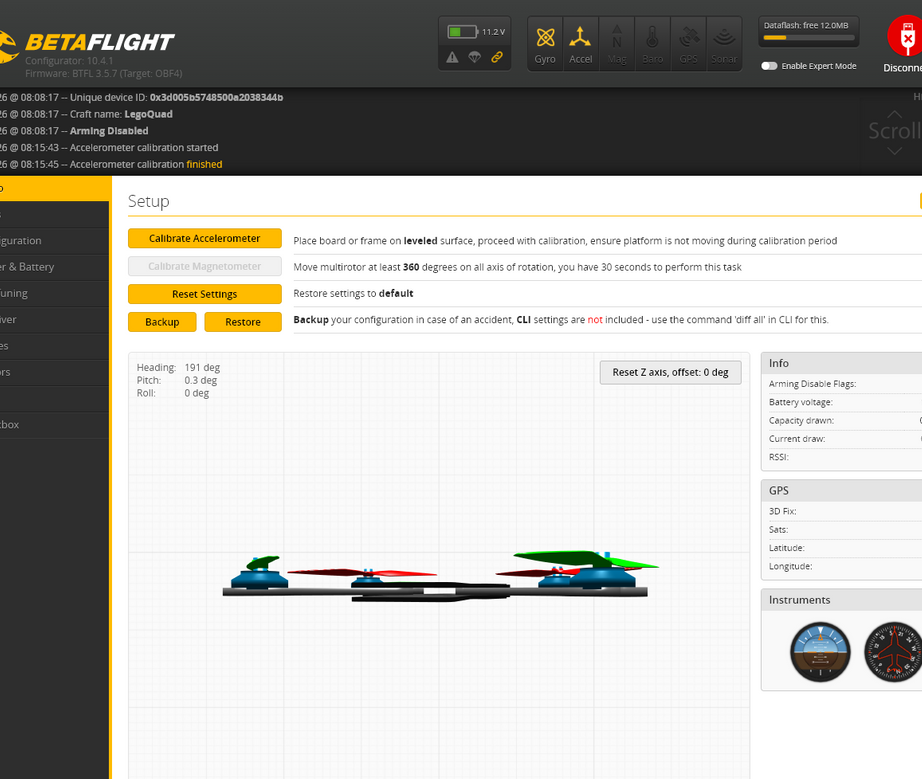
Klik på knappen "Opret forbindelse", og konfigurer følgende indstillinger:
1. Opsætning - modelkalibrering af motorer
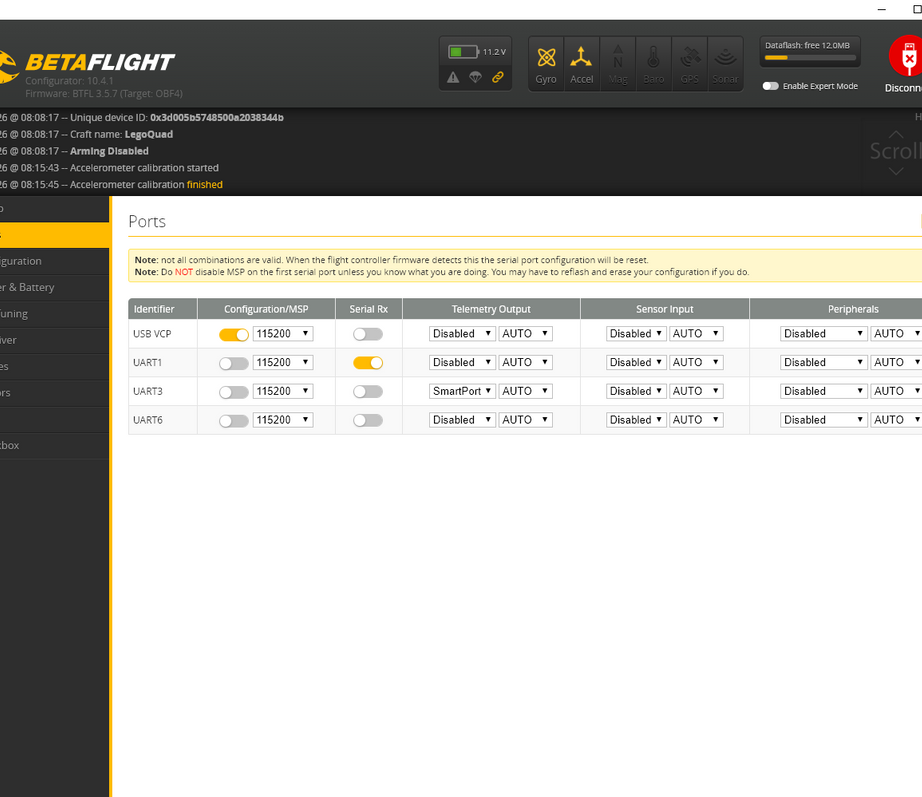
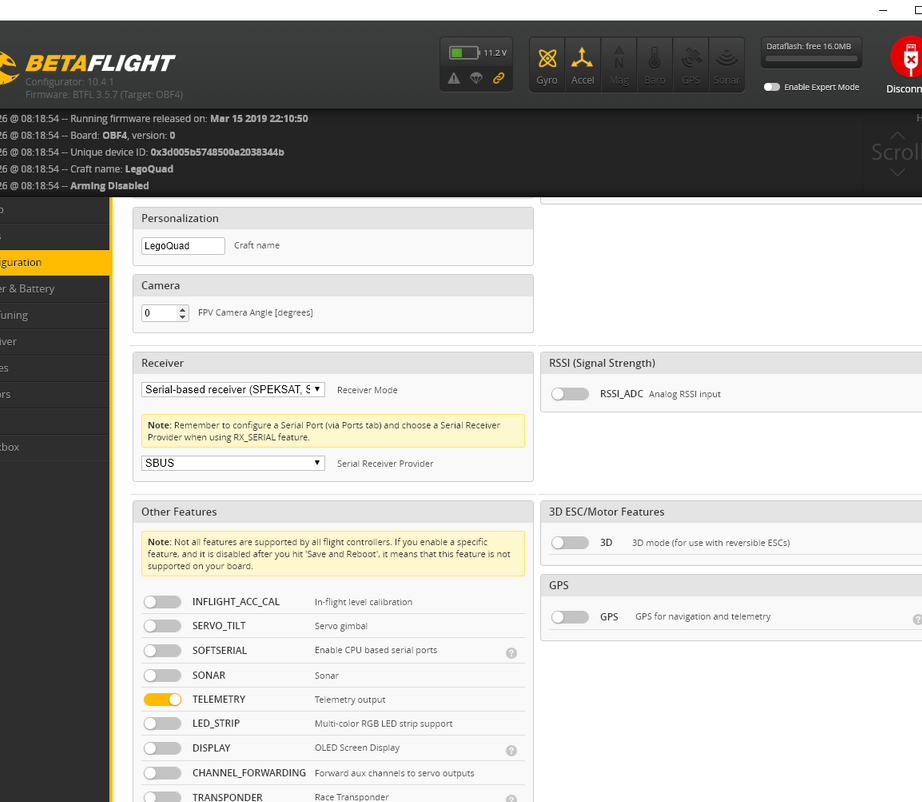
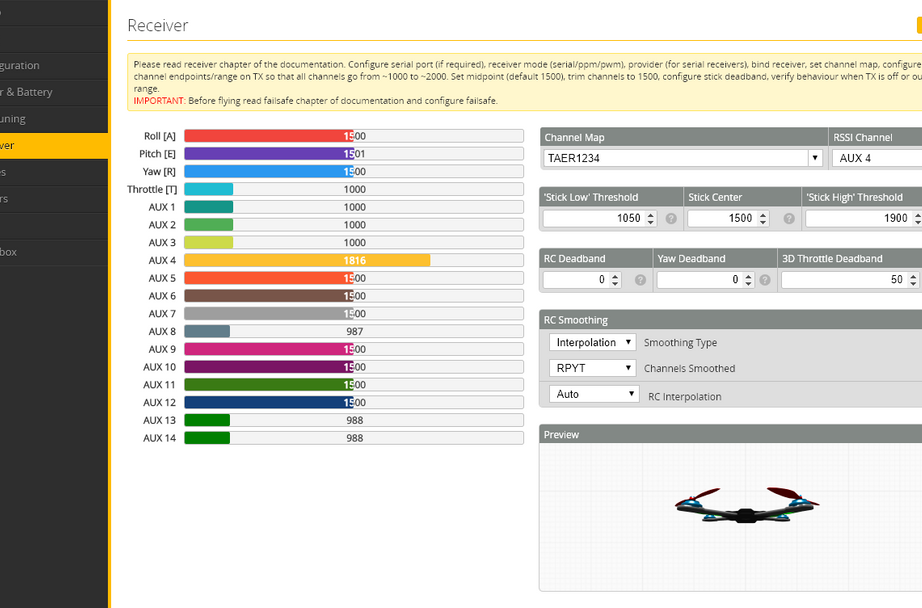
2. Angiv porte - UART1 - Seriel RX til tilslutning af SBUS RC-modtager
3. Gemning og genstart
4. Opret en forbindelse mellem modtageren og senderen
5. Overbelastning
6. Værdien for PID-masteren er indstillet til 250
7 Tilslut batteriet
8. Juster spændingen.
9. Sørg for, at din kanals display og kontrolretning er korrekt, når alt er konfigureret, skal quadcopter-modelbillede i nederste højre hjørne bevæge sig i alle rigtige retninger, når du flytter joysticks på RC-controlleren.
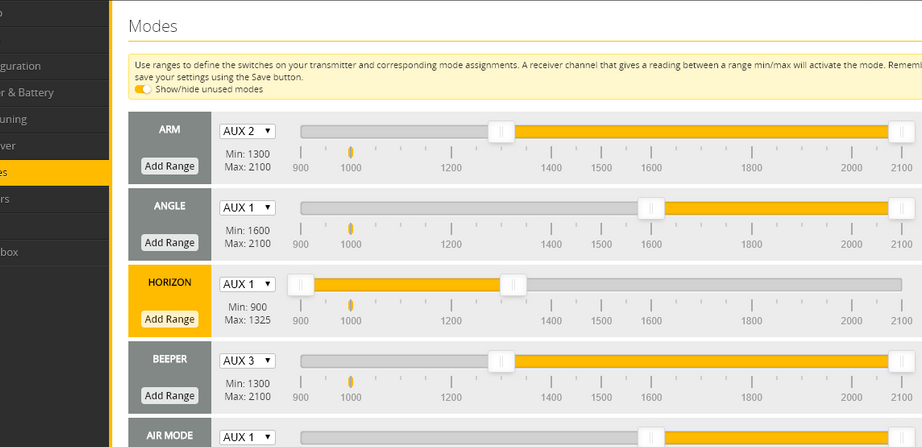
Konfigurerer tilstande.
ARM til / fra
HORIZON selvudjævnende / ACRO til traditionel FPV-flyvning
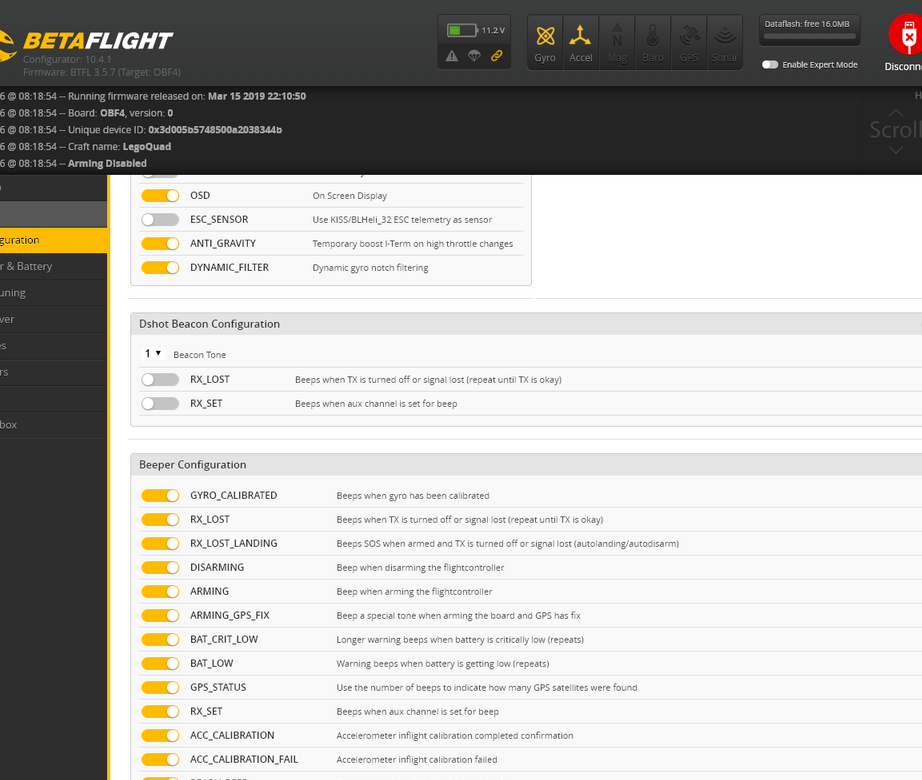
BEEPER - Nyttig, hvis du mister modellen i højt græs eller buske.
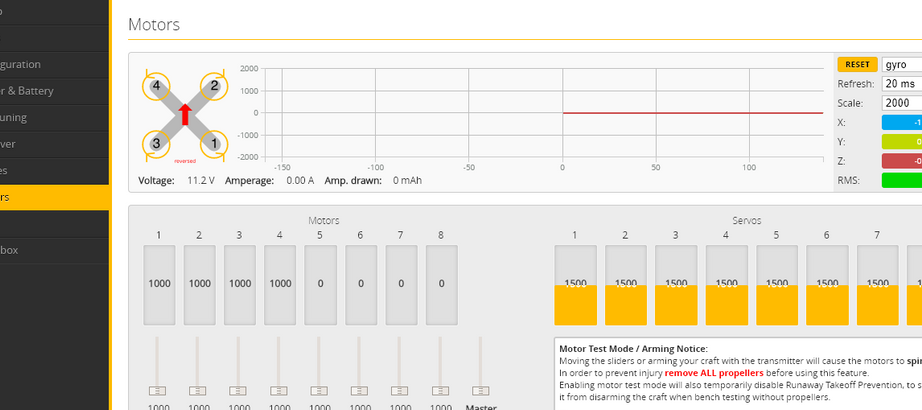
Fanen "Motorer" - brug denne indstilling til at kontrollere hver motor individuelt, og vigtigst af alt, markere rotationsretningen for hver af dem
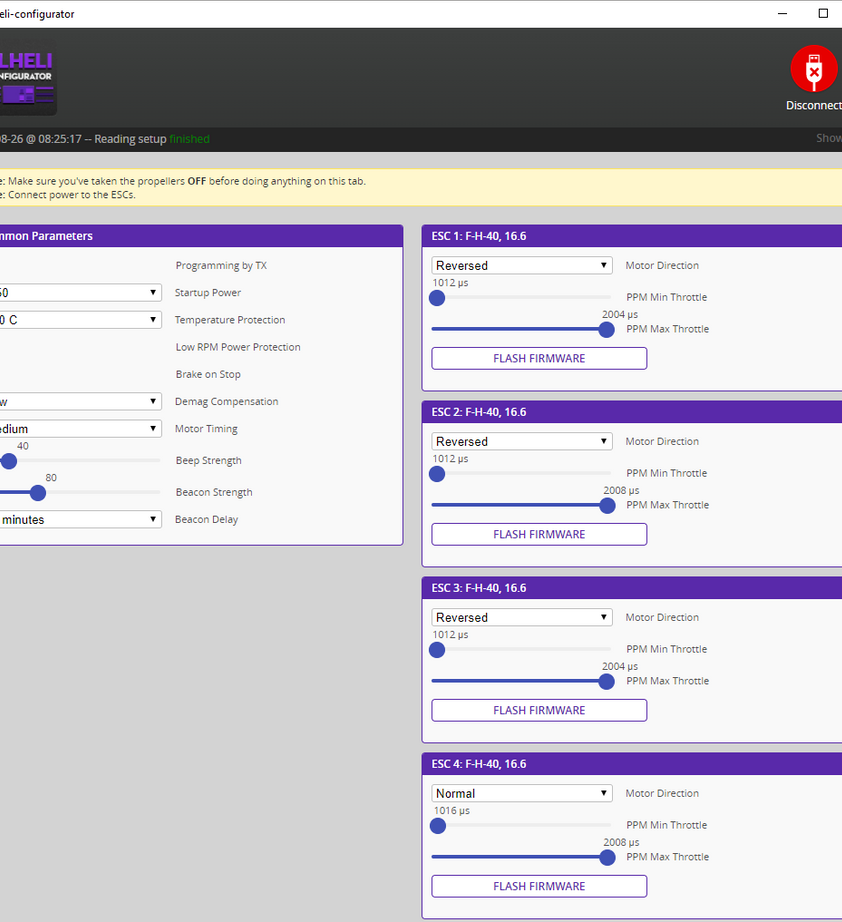
Ret enhver forkert rotationsretning med BLHELI-konfiguratoren
Efter alle disse trin kan du frakoble USB og batteriet og derefter tænde for strømmen og kontrollere, at alt fungerer:
Tænd for senderen og strømmen
Tilslut batteriet, og monter quadrocopter på en plan overflade
Tænd for ARM-kontakten, og motorerne skal begynde at dreje med lav hastighed.
Kontroller gashåndtaget, mens du øger hastigheden
I vandret tilstand skal du prøve at vippe quadrocopter og sørge for, at motorerne reagerer korrekt, f.eks. Vippe den fremad, og de forreste motorer accelererer.

Trin seks: Afslutning
Stort set hele sagsstrukturen holdes med monteringslåse. Føreren bruger kun smeltelim til montering af motorerne.


Alt er klar, og du kan teste.



