
God dag til alle kære venner! I dagens artikel vil jeg gerne vise dig en ret interessant idé hjemmelavet, hvilket kan gøres af næsten alle, der har gjort mindst lidt kunsthåndværk og hvem ved lidt om Arduino.
Generelt vil vi i dag gøre det enkelt robotter papstøvsuger gør det selv. Men du fortæller mig, for jeg har allerede fortalt dig, hvordan man laver en robotrenser selv, og du har ret, men denne robotstøvsuger er meget enklere, billigere og mere praktisk end den foregående. Ja, og det her modellen ændret og ser bedre ud og har også fuld automatisering om bord. dette ulige job, hjælper ikke kun med at passere tiden, men vil også blive en uundværlig assistent i dit hjem eller værksted. Kort sagt, tinget er nyttigt og ikke kompliceret.
Nå da, nok af det lange forord, lad os gå!
Og så til dette hjemmelavede produkt har vi brug for:
bølgepap (meget pap)
-
forbinder ledninger
-
-
-Hjul til gearmotorer
-driver af drivere til Arduino (forfatteren af det hjemmelavede produkt bruger en model driver, som du bare skal indsætte i arduino for at forbinde, men du kan bruge en driver, der er praktisk for dig, det vigtigste er, at spændingen matcher gearmotorerne)
-
-plastflaskehætter
- børstehår fra en kost
-motor med en turbinevifte, i princippet kan du gøre det selv
plastnet
- lille beholder
æske til to 18650 batterier
-
Af de værktøjer, vi også har brug for:
loddejern
limpistol
brevpapirkniv
-lineyka
- blyanter eller markører
Det første trin er at tage et stort ark pap, en lineal og et kompas. Vi måler 13 cm med et kompas og tegner en cirkel på pap, hvorefter vi skærer den ud, i alt har vi brug for to sådanne cirkler:


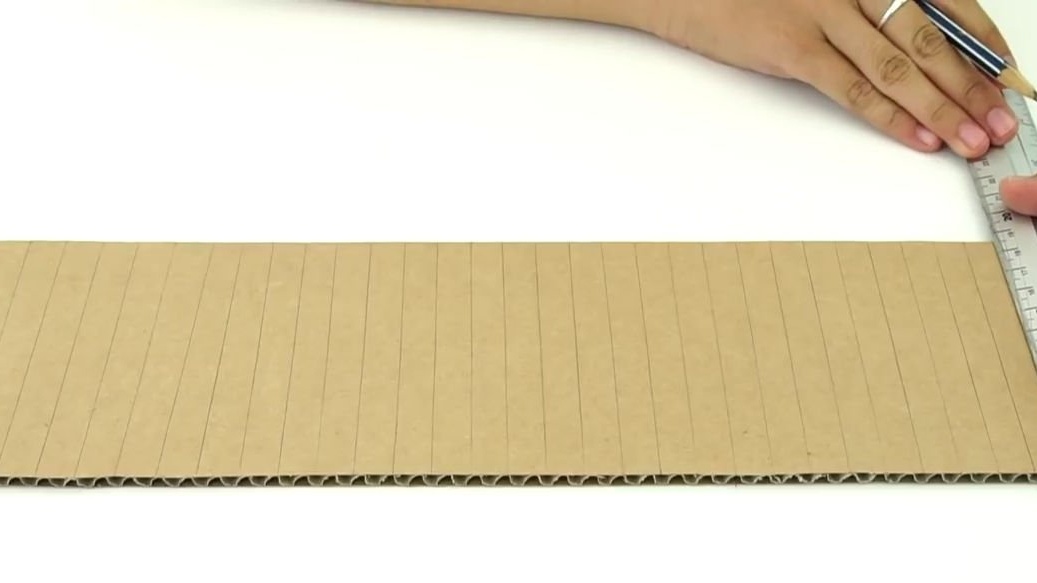
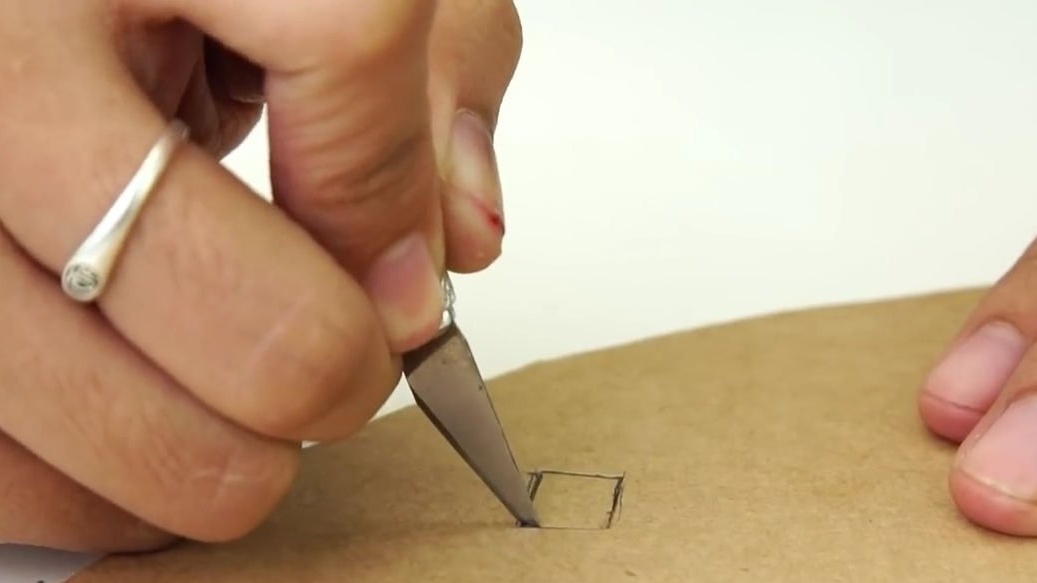
Derefter skærer vi ud et rektangel af lille størrelse fra den samme pap. Vi tager en lineal og en blyant, med en blyant tegner vi en pap med et interval på ca. 1 cm. Efter denne procedure tager vi en klerisk kniv og laver små snit af det øverste lag af pap, uden at røre ved bunden. Dette er nødvendigt, så papen bliver mere elastisk:



Vi snor det tidlige emne, der er lavet omkring en af papcirklene, og selvfølgelig limer vi det med varm lim:

Lad os beskæftige os med elektronik og den mekaniske del.
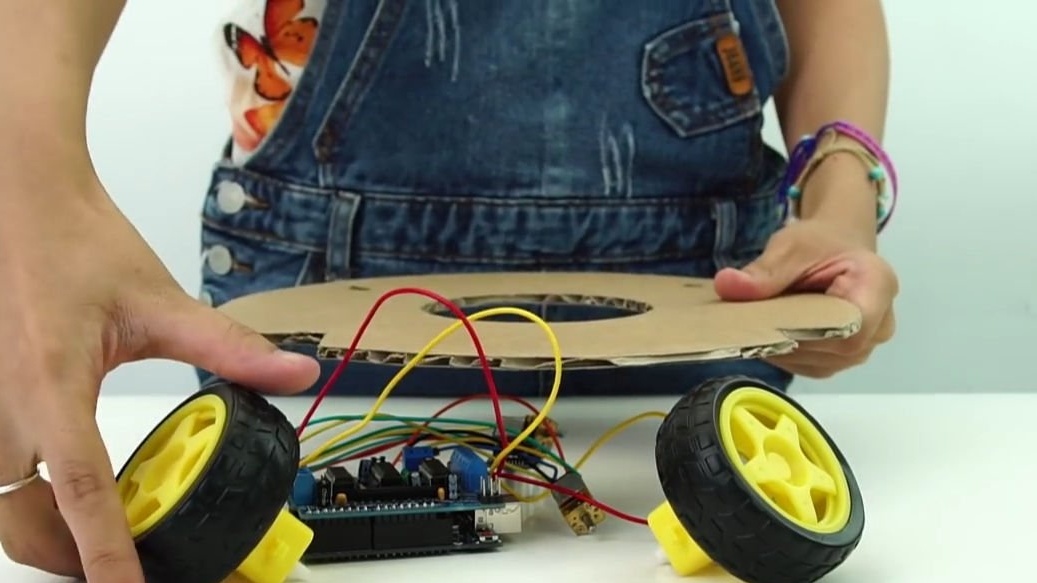
Først skal du tage gearmotoren og sætte et hjul på det, det samme gør vi med den anden motor:

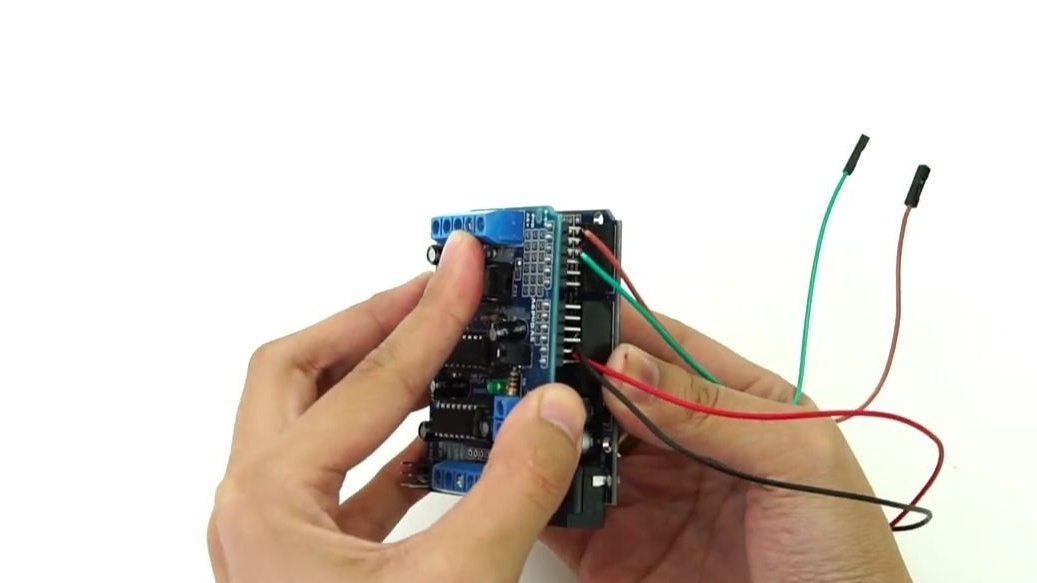
Derefter tager vi Arduino Uno-kortet og forbindelsesledninger, som igen skal forbindes til bestemte stifter (kontakter) på brættet. For nemheds skyld tager vi forskellige farver: vi forbinder rødt til 5 volt, sort til GND og de andre to til to forskellige stifter. Hvilke ben der skal forbindes ledningerne, skal du straks finde ud af på baggrund af koden, eller skrive de stifter, som dine ledninger er forbundet til. Generelt er der ikke noget kompliceret her, vi forbinder:

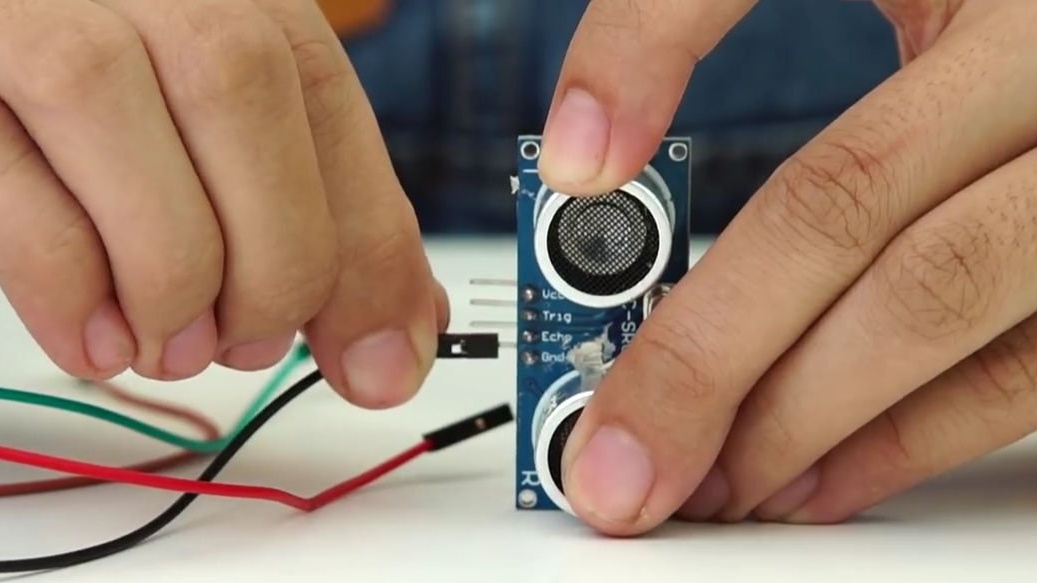
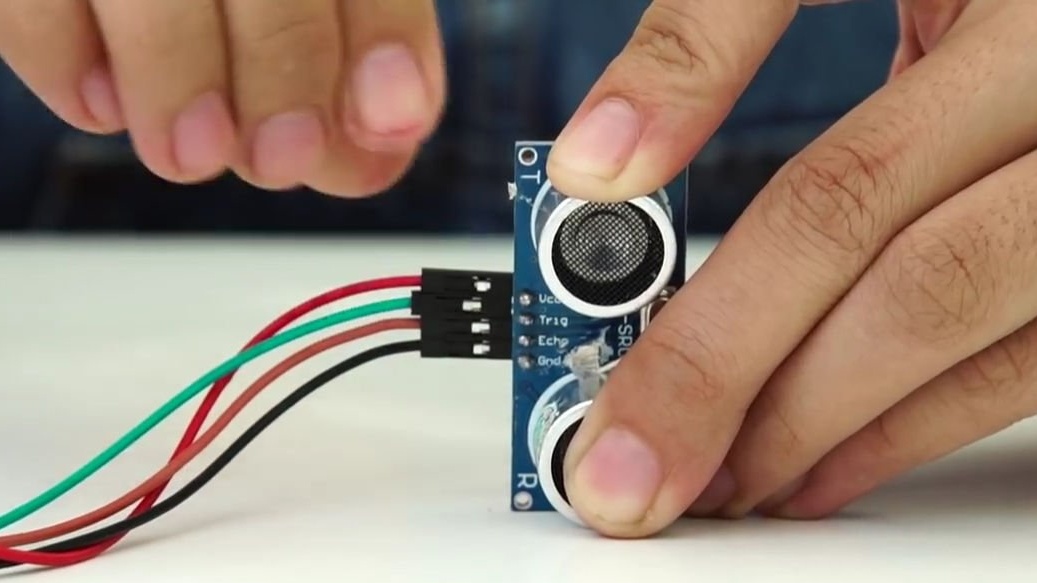
Vi forbinder den modsatte side af ledningerne til ultralydsområdesøgeren, som vist på billedet herunder, hvis det ikke er klart, kan du se forfatterens video.
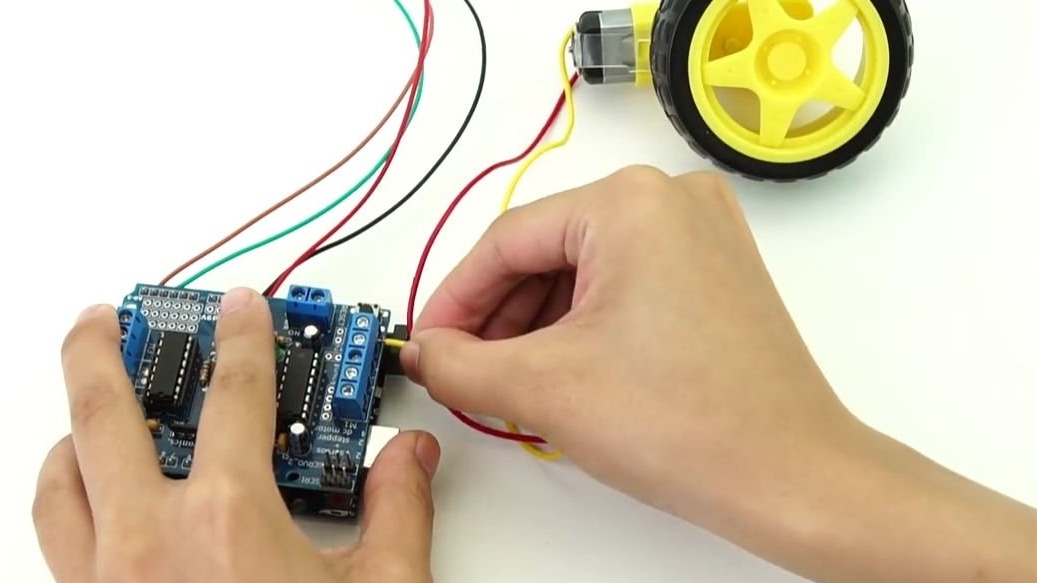
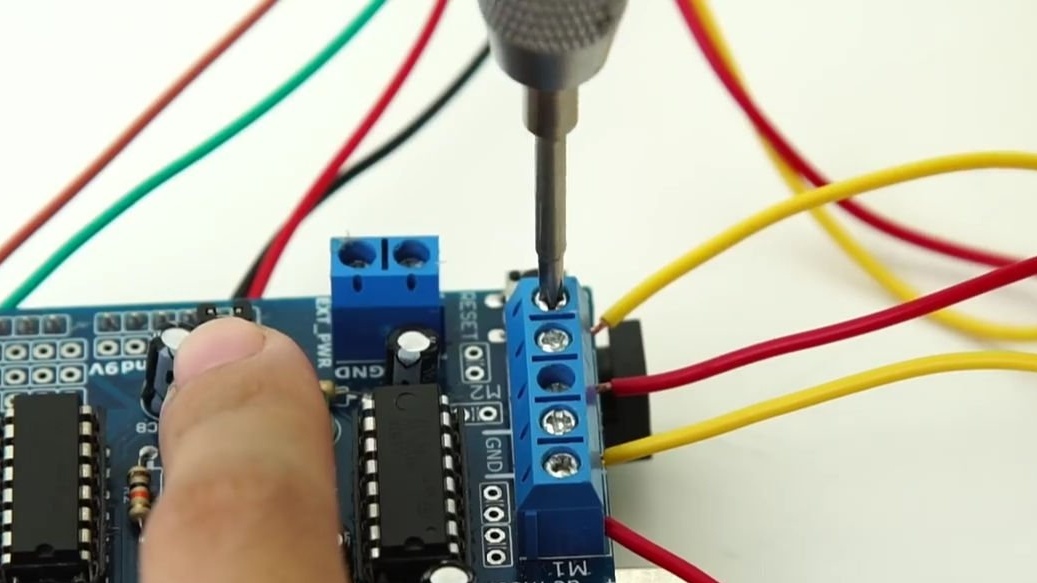
Vi forbinder gearmotorer til motordriveren, du behøver ikke engang at lodde noget, bare sæt det ind i klemmerne, og det er det:

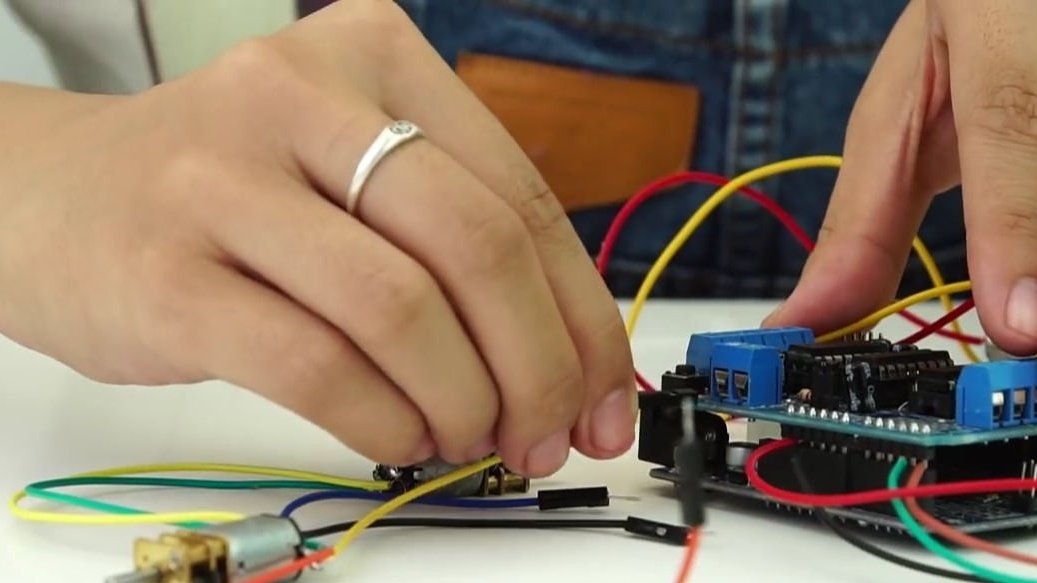
Det er nødvendigt at lodde forbindelsesledningerne til minimotorerne, ved hjælp af hvilke vi forbinder disse samme motorer til motordriveren. Generelt forbinder vi:
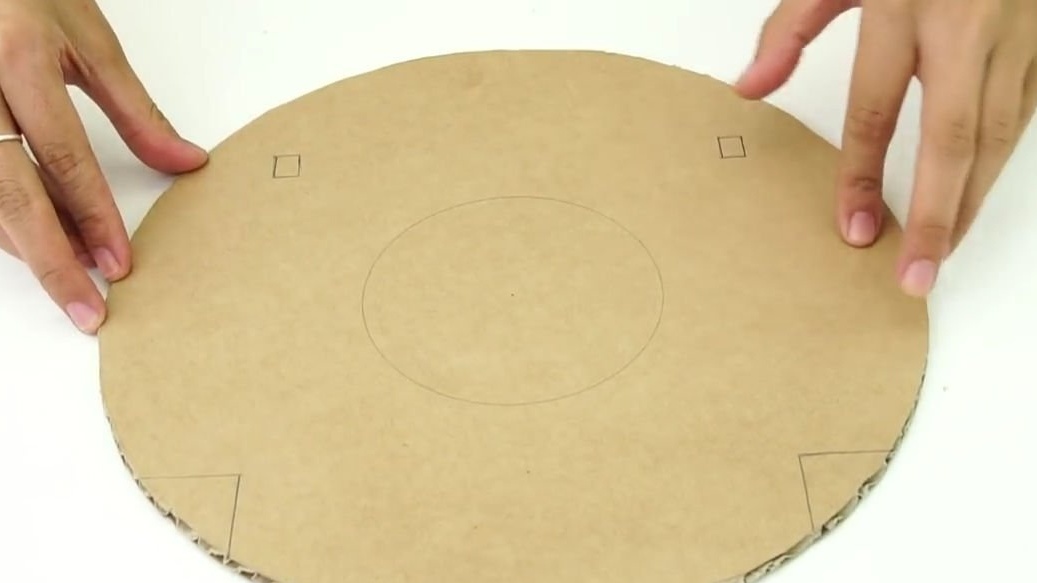
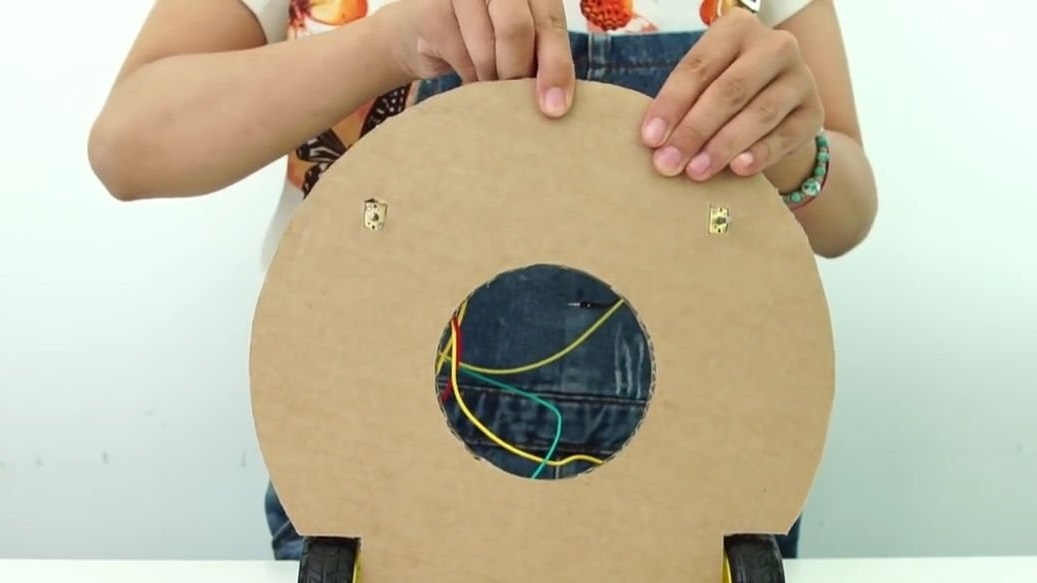
Nu tager vi den resterende papcirkel, som blev lavet i starten. På det skal du tegne en anden cirkel i midten og flere rektangler. Du kan se al markeringen på billedet herunder. Derefter skærer vi de markerede huller ud, det skulle vise sig på samme måde som på billedet herunder:

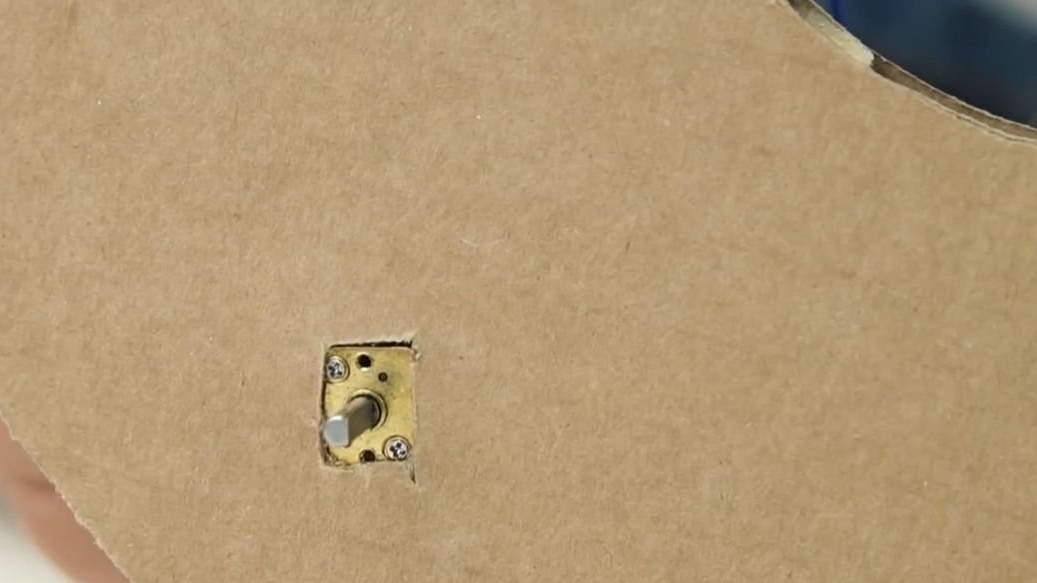
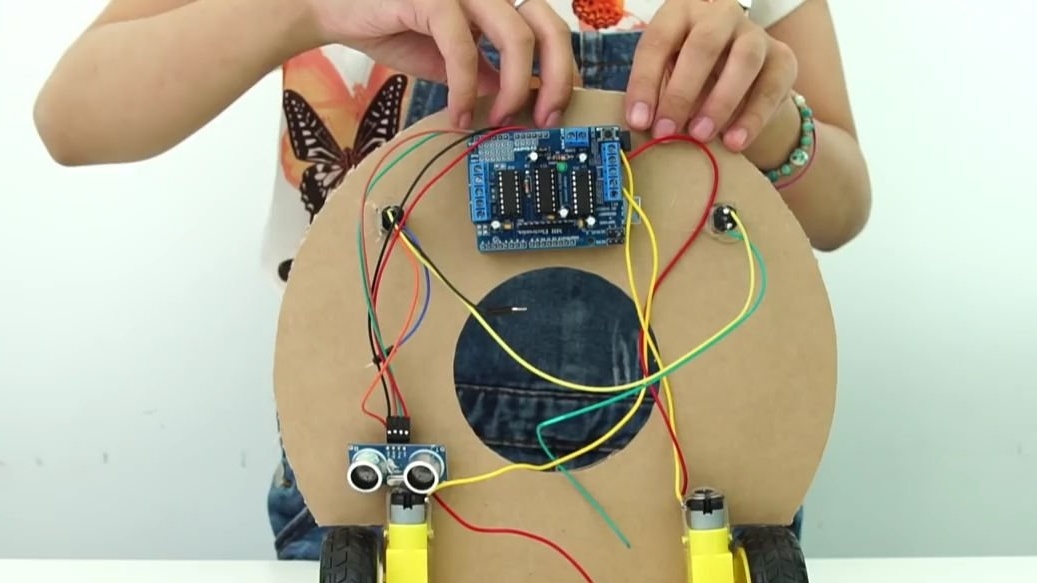
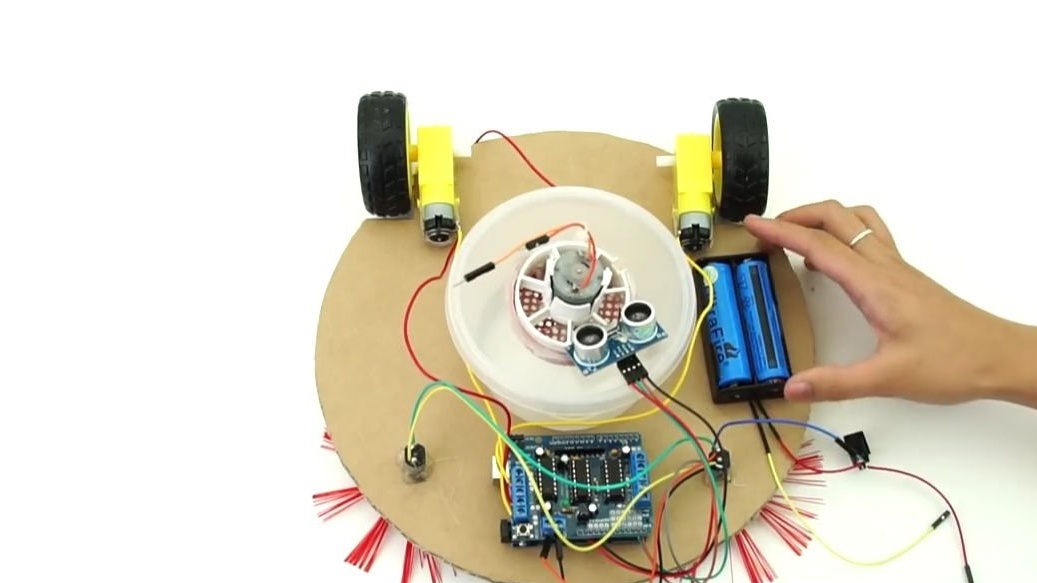
Tag helheden elektronik og placer den på en tidligere lavet papcirkel. Vi indsætter små motorer i de slidsede rektangulære huller, og fastgør resten af elektronikken til varmsmeltet klæbemiddel, monterer store gearmotorer parallelt med bagsiden og rører ikke den ultralydsmåler:

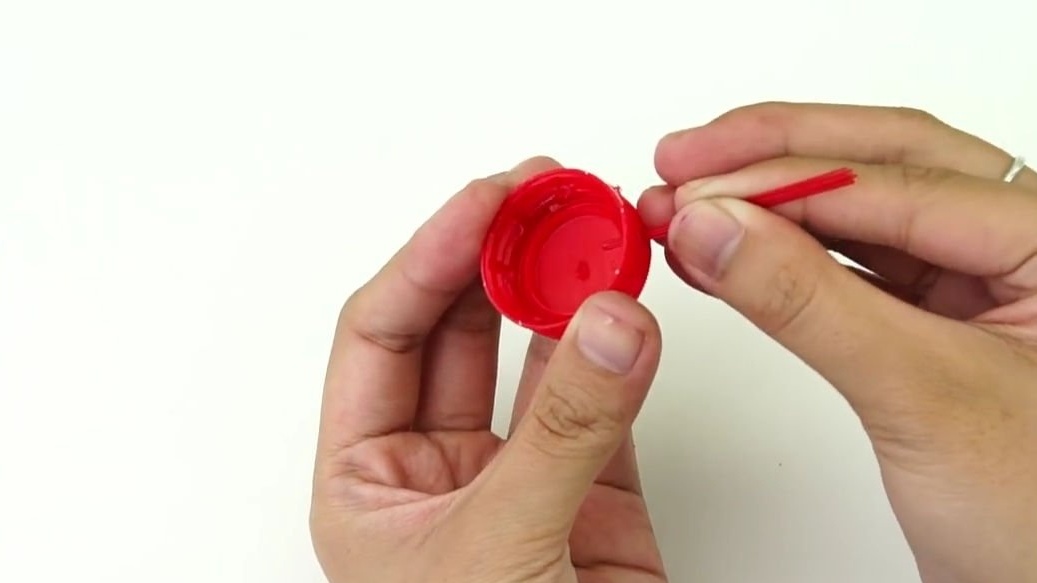
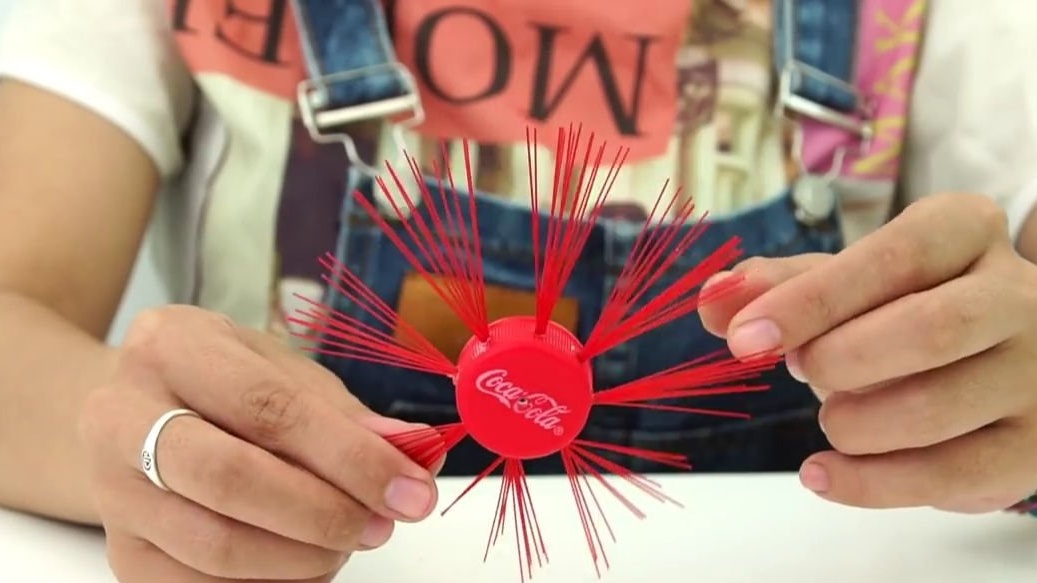
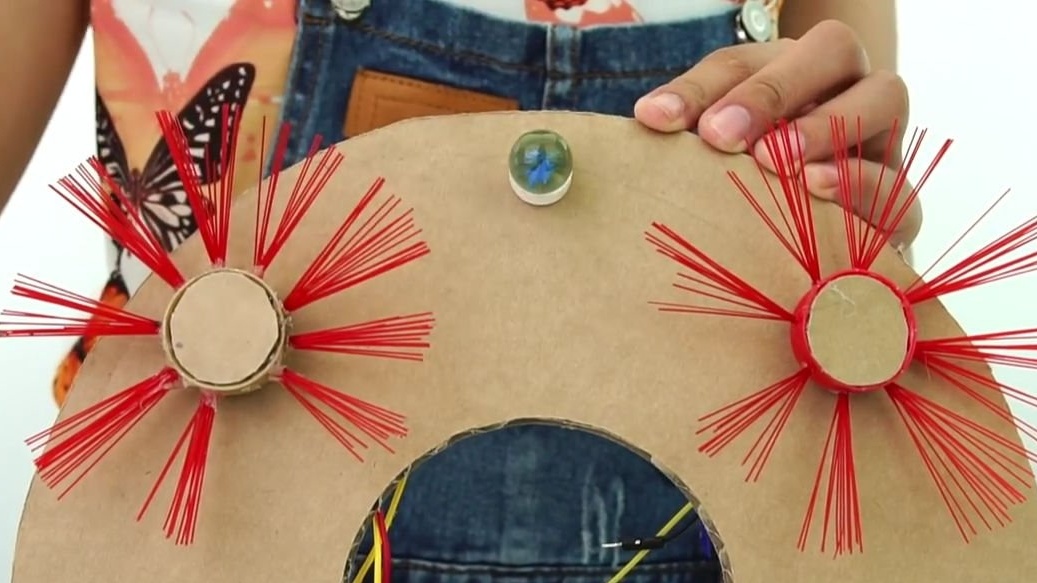
Vi fjerner hættene fra plastflaskerne, vi har kun brug for to stykker. Ved hjælp af et loddejern, en varm søm eller en snor, lager vi huller: den ene i midten af låget og den anden på siderne med et indrykk på ca. Vi fastgør disse børstehår med varm lim. I alt skal to sådanne emner fremstilles.
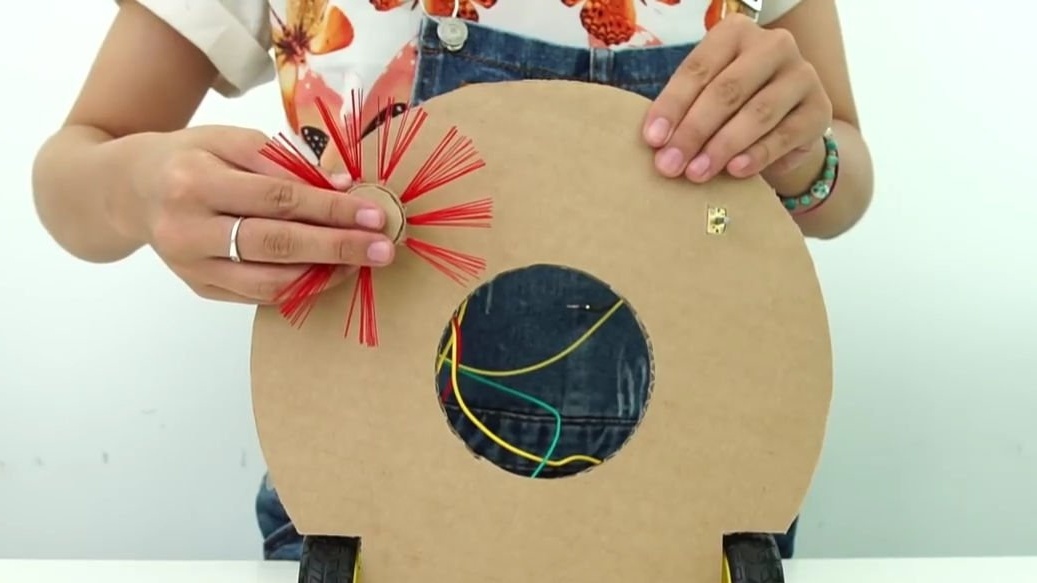
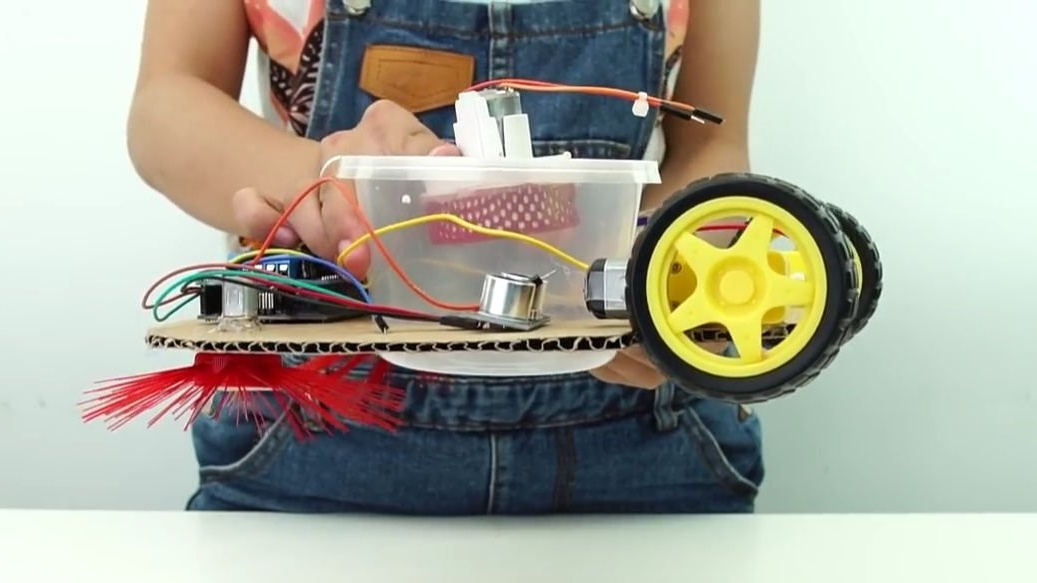
Vi limer dem på aksen til små motorer, som er placeret på en papirkreds. Vi limer igen med varm lim:



På den forreste, mellem to børster, limes en lille kugle eller et lille hjul, der kan rotere rundt om sin akse:
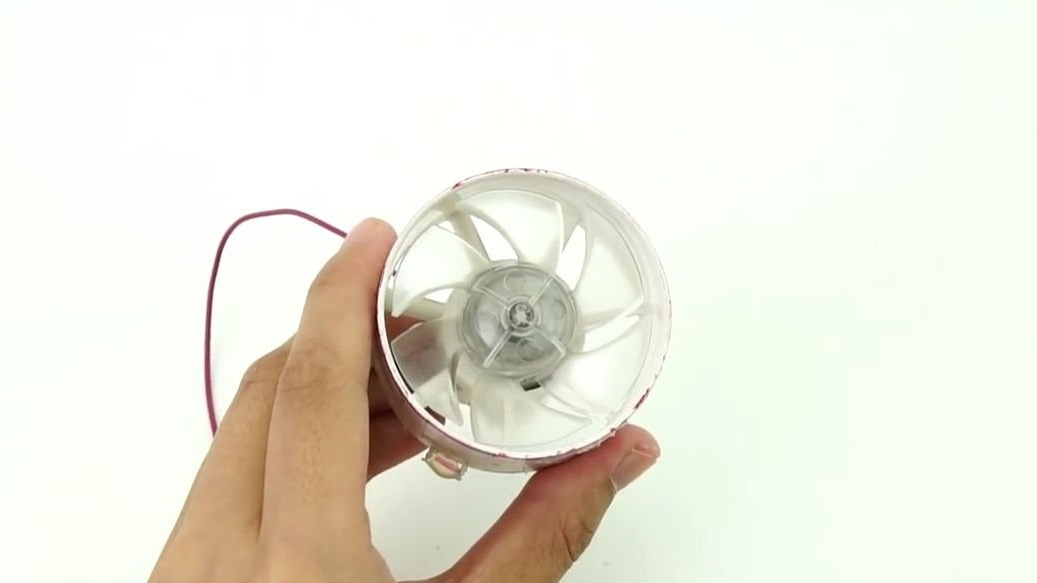
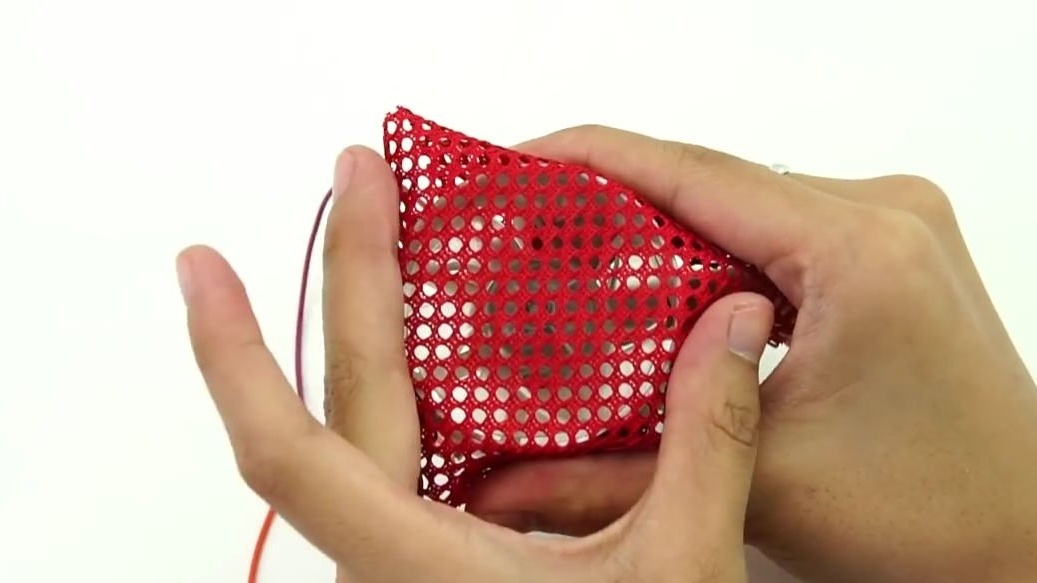
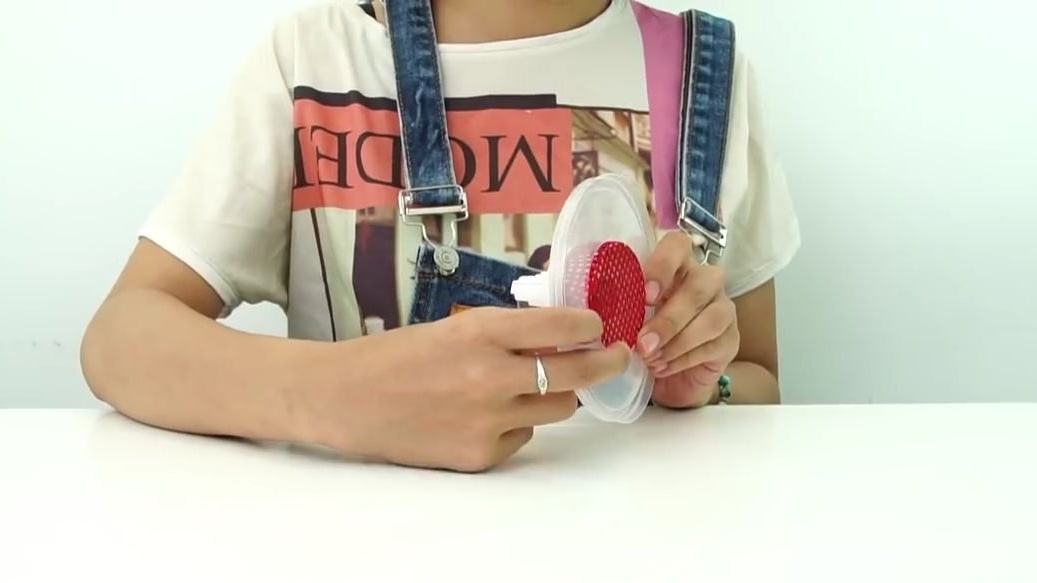
Nu har vi brug for en elektrisk motor med en turbin, der kan suge luft, og generelt kan en meget kraftig køler komme op. Vi lægger på og fikserer et plastnet på fronten af turbinen, det er nødvendigt at beskytte turbinen, det vil sige for at forhindre, at store affald trænger ind og sigter ud. Fjern låget fra plastbeholderen. Beholderen skal fortrinsvis have rund form. I låget laver vi et jævnt rundt hul, hvor du skal indsætte og lime turbinen med et net. I selve beholderen laver vi et lille rektangulært hul med kanten. Vi lægger låg med turbinen på beholderen, og du er færdig. Robådens sugedel er færdig. Jeg vil minde dig om, at alt skal gøres som vist på billedet herunder:



Vi tager bunden af roboten og installerer en beholder med en turbin i det centrale hul og limer alt fast med varm lim. Derefter på siden af strukturen installerer vi en kasse med 18650 batterier og en afbryder, der er tilsluttet en af de ledninger, der kommer fra kassen. Vi tilslutter nye ledninger til Arduino, vi laver endelige klipning, og vi kan fortsætte.
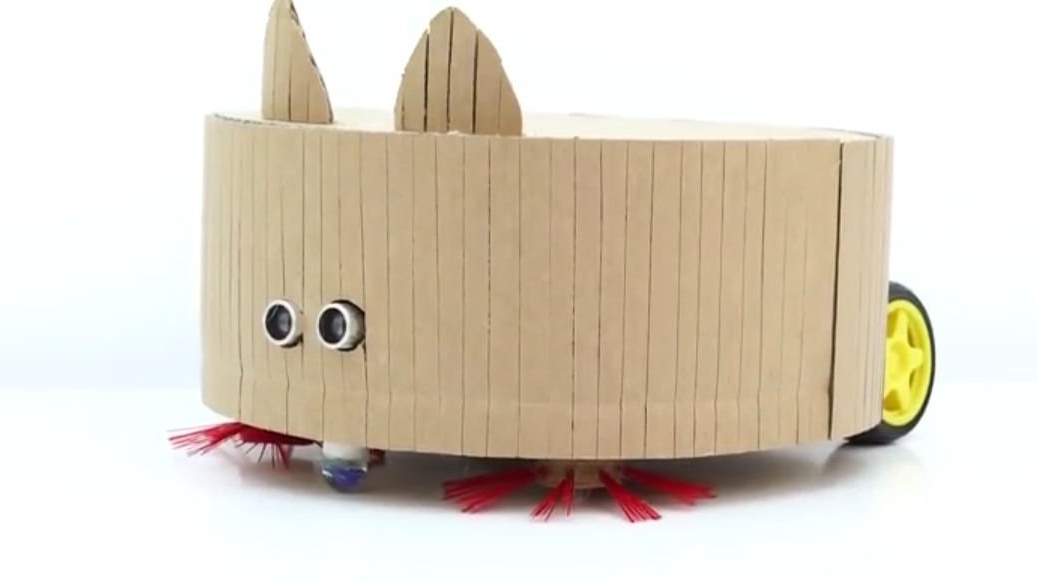
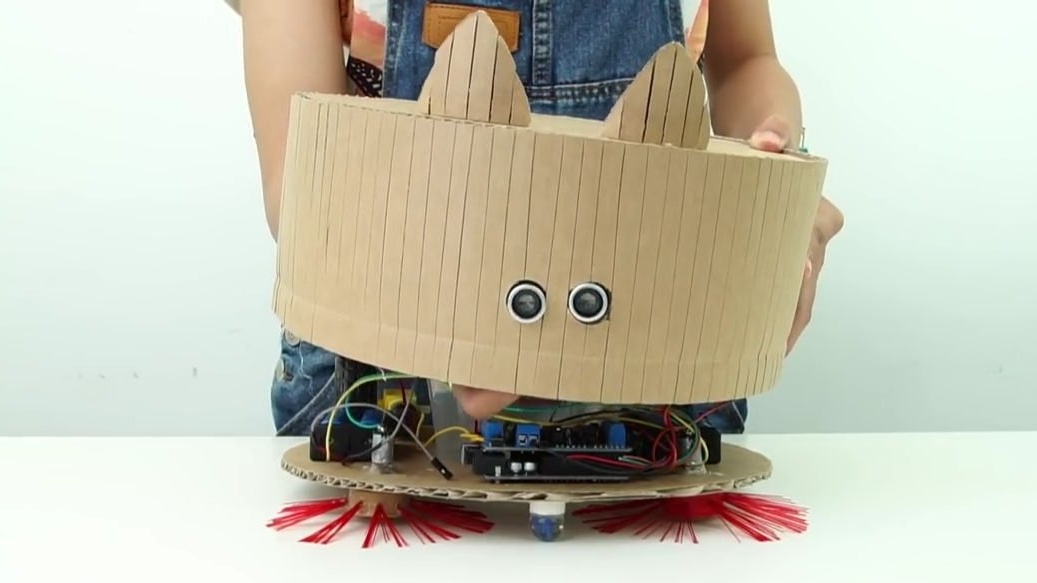
Vi indsætter ultralydsområdesøgeren i specielle huller, der skal gøres på forhånd i robotlegemet. Som du måske husker, blev denne bygning lavet i begyndelsen. Forfatteren af artiklen tilføjede også dekorative elementer i form af ører, og en ultrasonisk afstandsmåler kommer ud i stedet for øjet, alt dette ser meget godt ud. Vi lægger sagen over bunden af strukturen og ordner den, men ikke meget, for i hvilket tilfælde skal du få batterierne til opladning.Selvfølgelig kan du installere en model til opladning af batterier direkte i roboten, men det er usandsynligt, at det erstatter opladning af høj kvalitet.
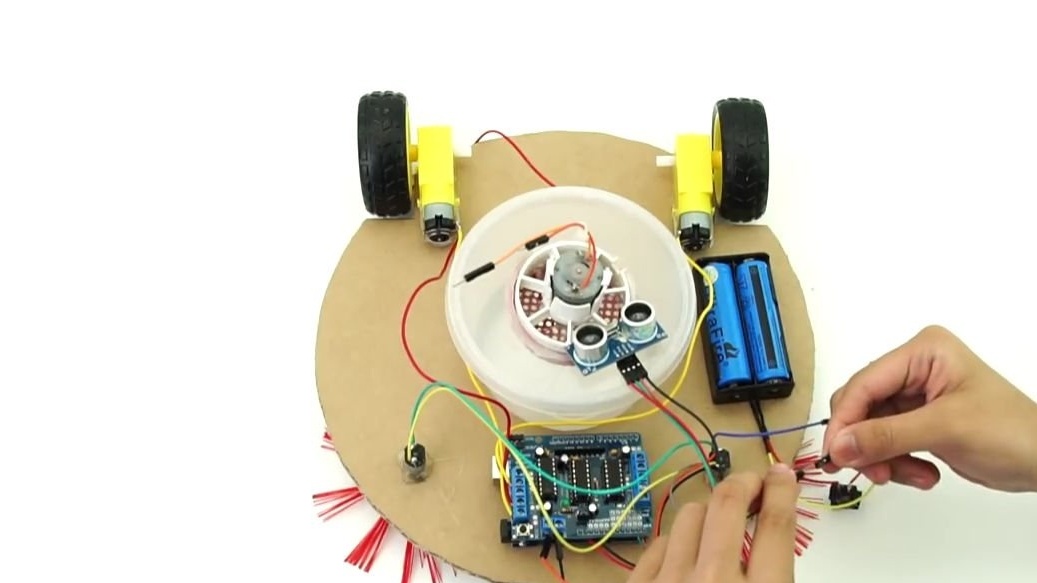

Det gjenstår kun at uploade firmwaren til Arduino, generelt er det bedst at gøre dette, når du har tilsluttet alle elektroniske komponenter for at kontrollere kredsløbet og koden, men du kan gøre det senere. Det er bedst at skrive en skitse til hældning på Arduino selv, men du kan simpelthen finde på Internettet en færdiglavet skitse til robotter med en ultralydsensor, der går rundt i en hindring. Fordelen ved sådanne skitser er nu afsluttet. Men for at undgå forskellige faldgruber, er det bedre at skrive uafhængigt for dig selv.
Det er det! En simpel og funktionel robotstøvsuger er klar, og det gjenstår kun at teste den! For at gøre dette skal du bare tænde det og begynde at køre på gulvet og støvsuge alt affald. Robotten bevæger sig og drejer, når forhindringen nærmer sig, og dette er meget mere praktisk end tidligere modeller.



Her er en video fra forfatteren med en detaljeret samling og hjemmelavede tests:
Du kan også tænde denne robot fra en magtfuld bank, du kan se min detaljerede gennemgang for en god en, selvfølgelig, hvem der vil være interesseret i dette:
Nå, alle held og lykke i fremtidige projekter, venner!