
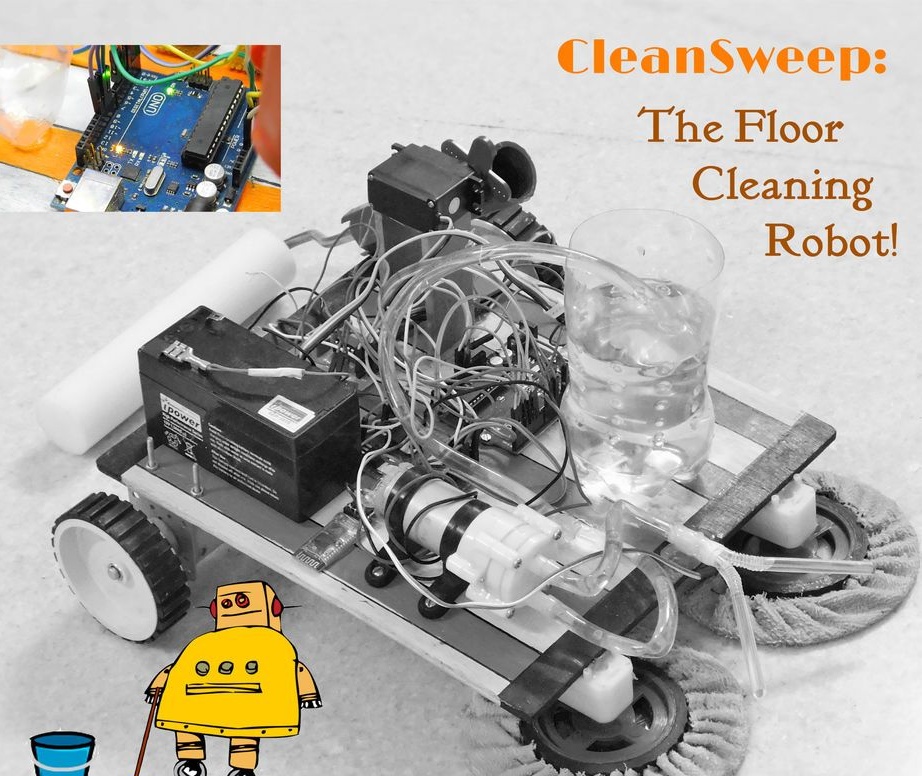
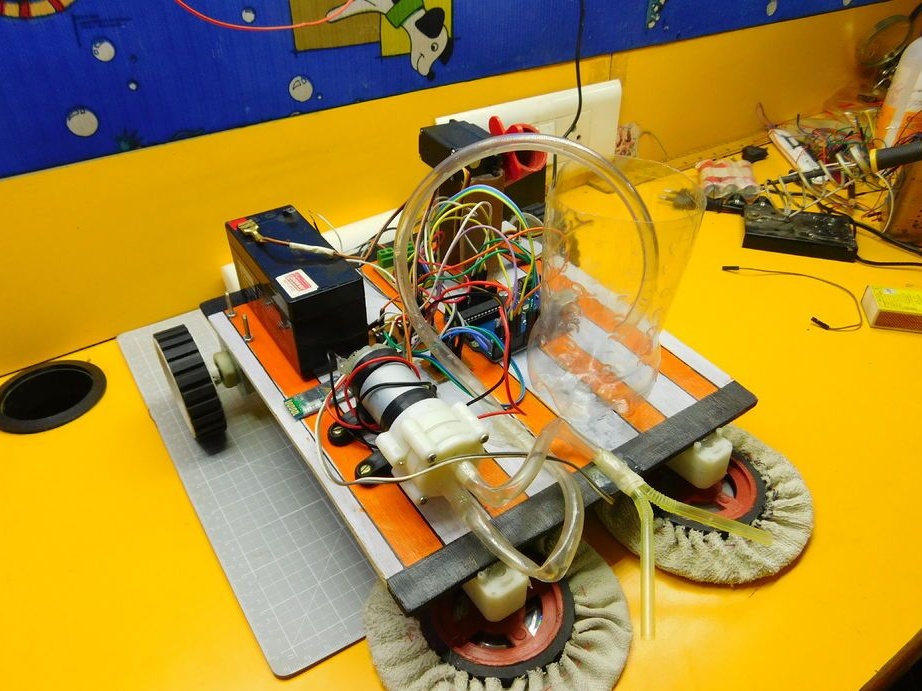


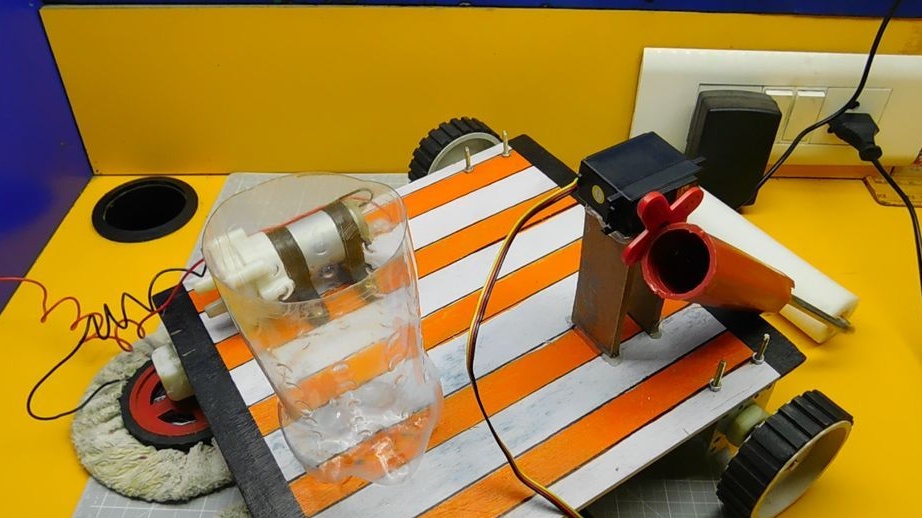
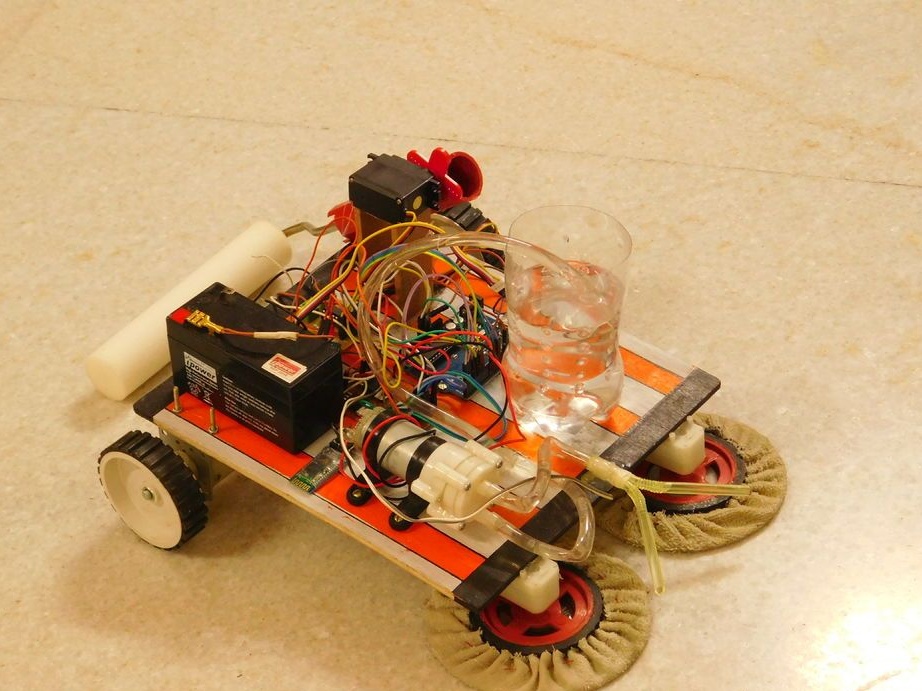
RobottenHøsteren har i sit arsenal to roterende børster monteret på fronten af gearmotorakslen. Gearkassen roterer med en hastighed på 75 o / min. Robotten har en vandtank om bord. En rulle er fastgjort bag på robotten. Roboten er blandet ved hjælp af hjul, der er fastgjort på gearmotorens akse. Rengøringsmidlet styres af smartphone via Bluetooth. I fremtiden planlægger mesteren at gøre roboten fuldstændig autonom. Lad os se, hvordan denne enhed fungerer.
Værktøjer og materialer:
-Motorhjul 100 omdr./min. -2 stk.
-Hjul til motoren -2 stk;
-Motor-reducer med et hjul på 75 o / min - 2 stk;
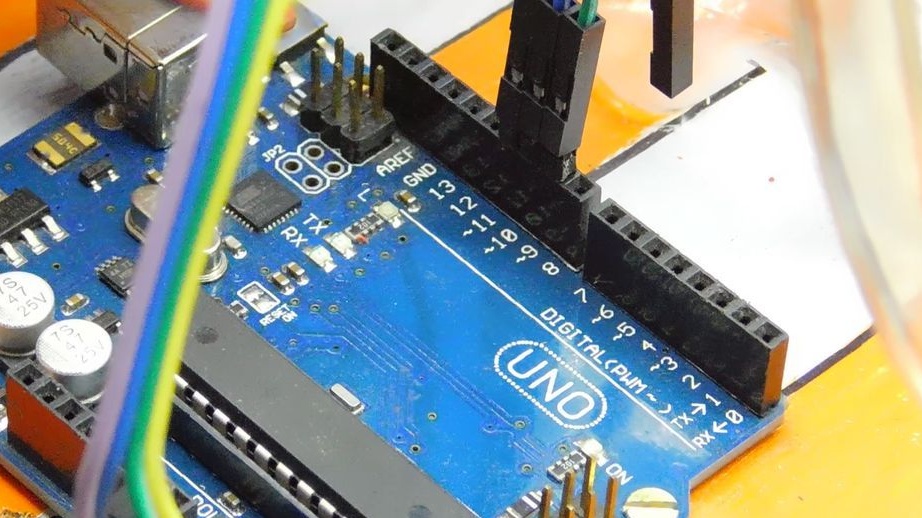
-Arduino UNO;
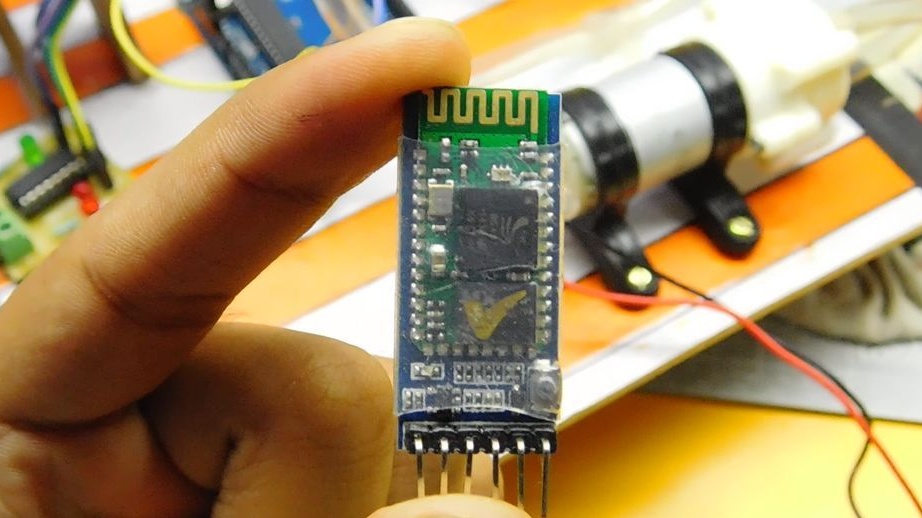
- Bluetooth-modul HC-05/06;
-Driver L293D;
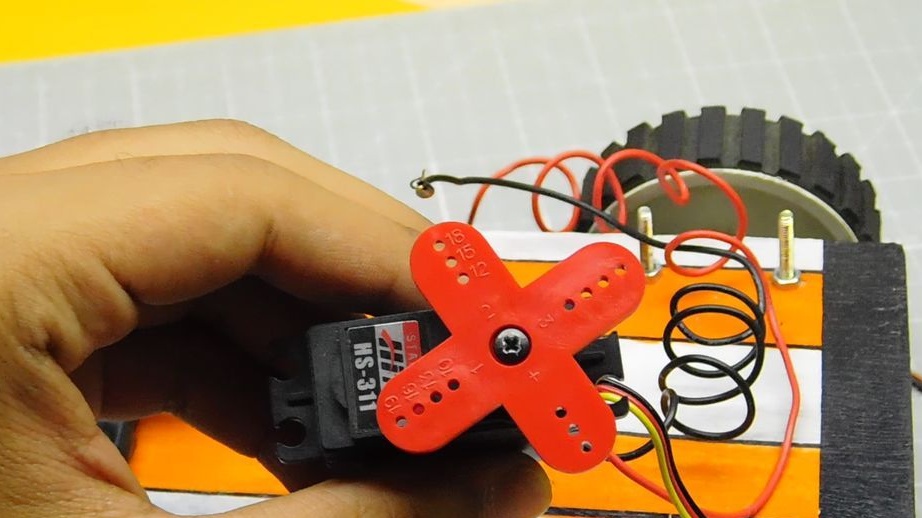
- Servomotor (180 graders rotation);
-12V batteri;
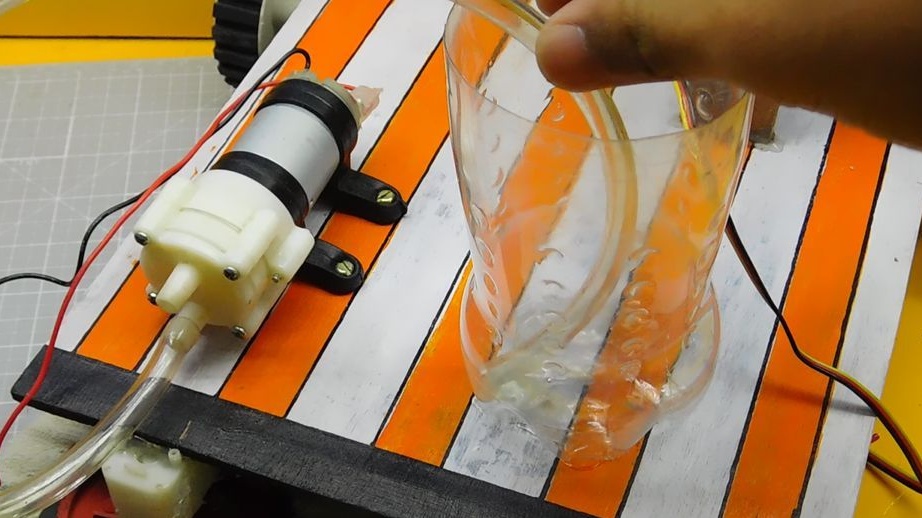
- Pumpe 12 V;
Transistor TIP31C;
Transistor TIP122;
- CD-drev - 2 stk .;
- Malerulle;
- Tøjservietter;
- Nål med gevind;
-Trubka;
seeing-;
- Jumpere;
-Monteringstavle;
-Krepezh;
-Fanera;
-Plastflaske;
Loddejern;
-Limpistol;
-Drel;
- Tænger;
-Dremel;
- børste;
-Colors;
-Marker;
- saks;











Trin 1: Foundation
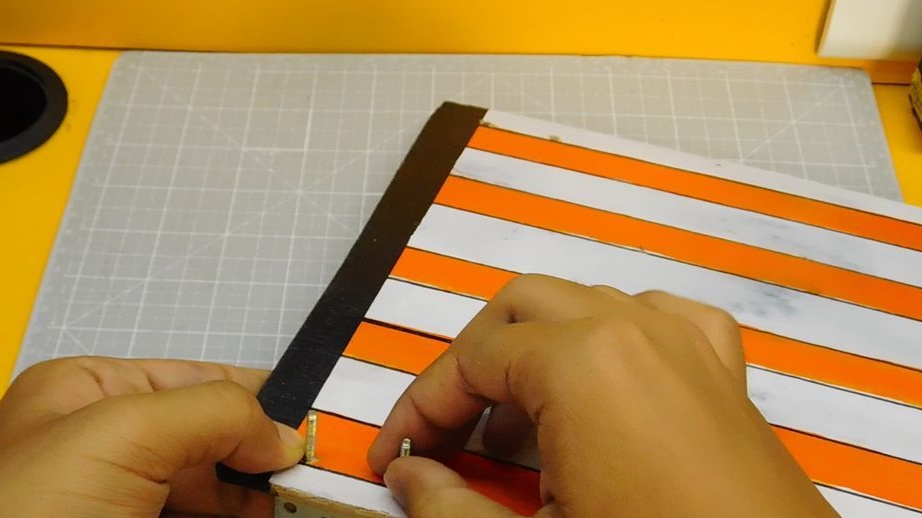
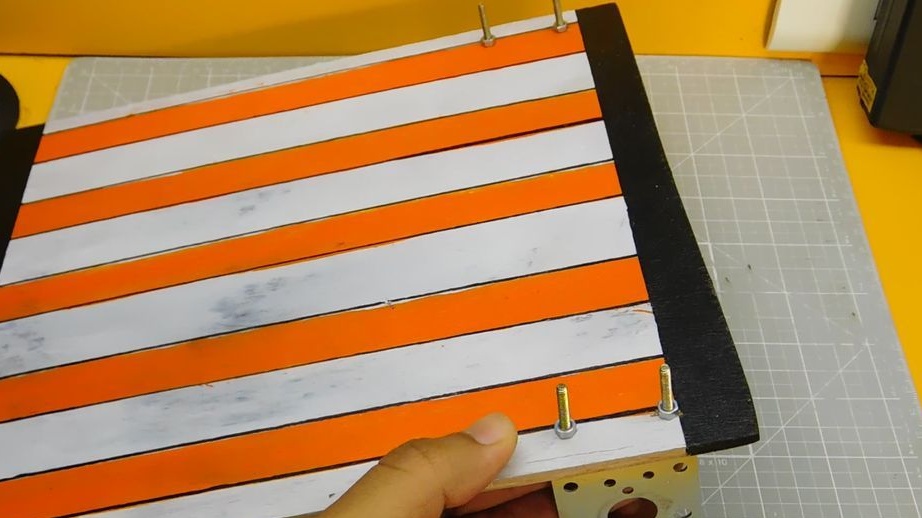
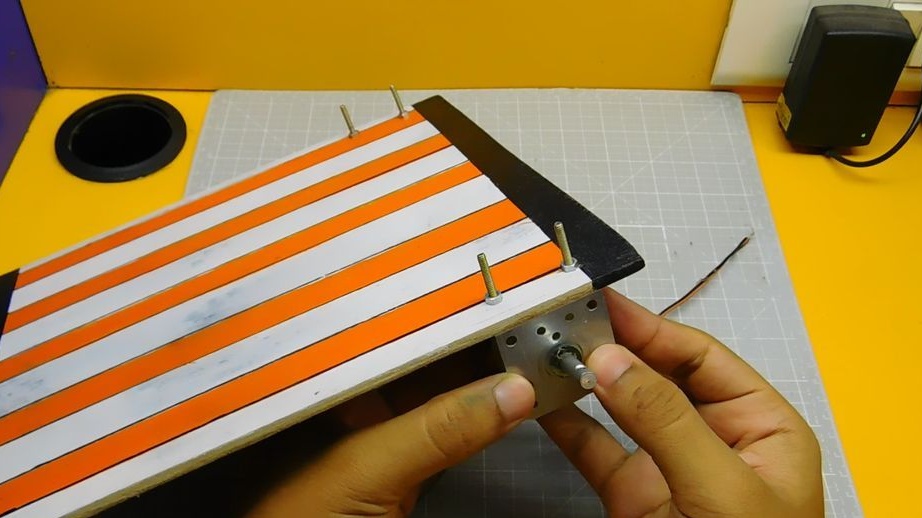
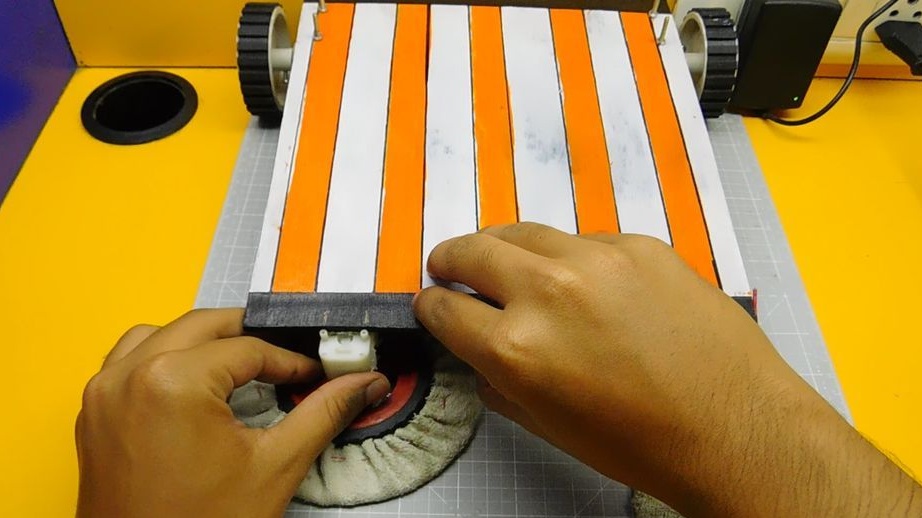
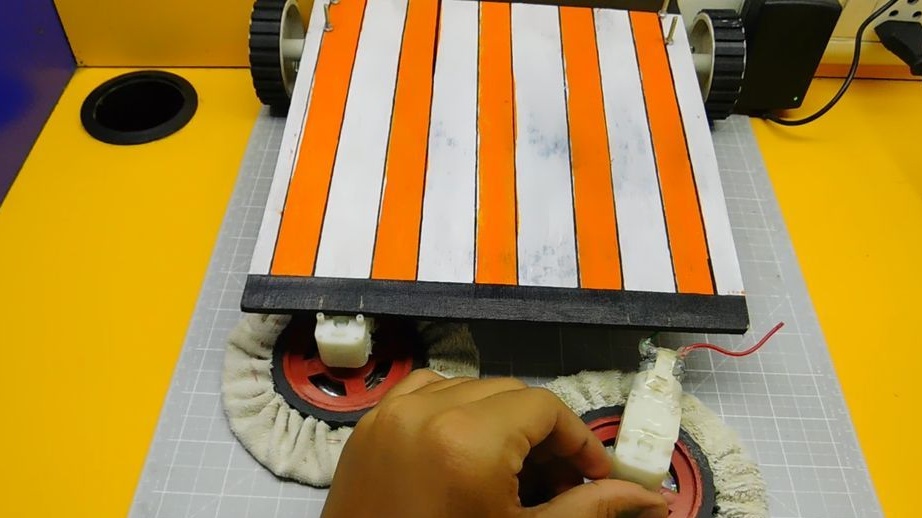
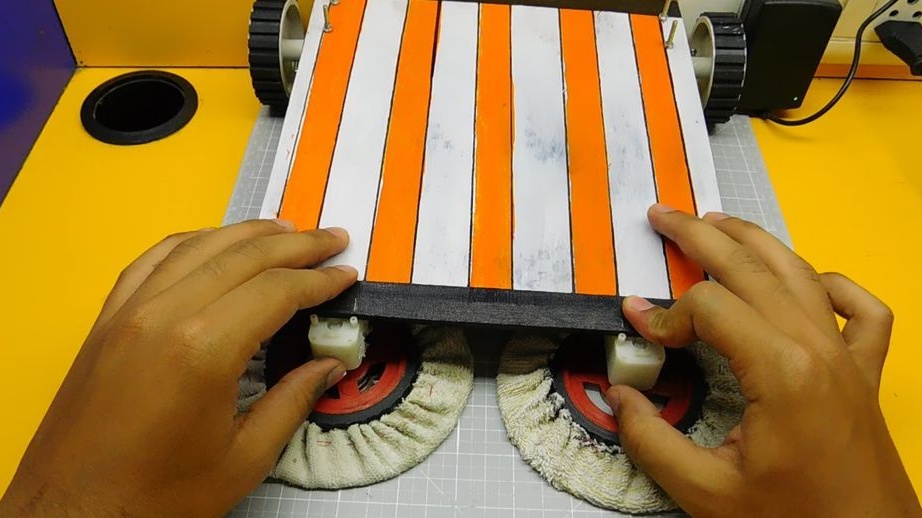
Fra krydsfiner skærer basen. Basisstørrelserne er 30 * 22 cm. Maler basis. På den ene side fastgør den gearmotoren. Koaksialt fastgør gearmotoren på den anden side af basen.


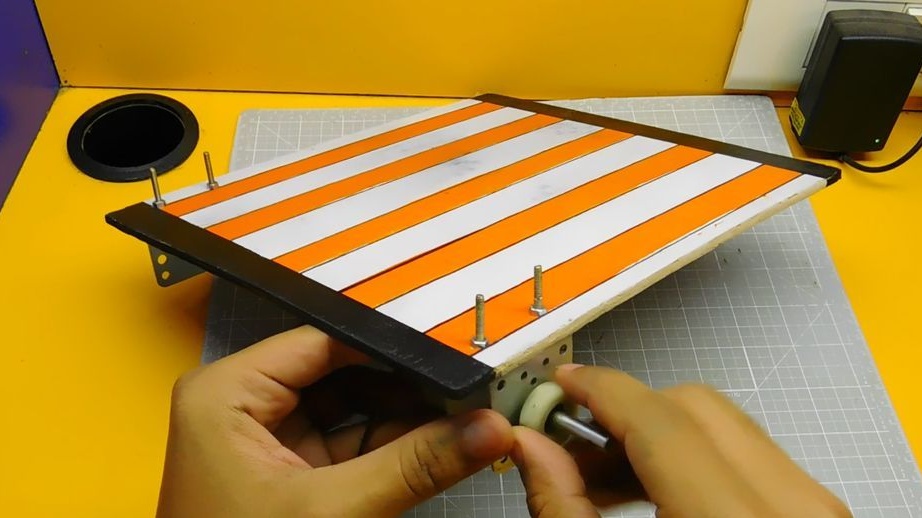

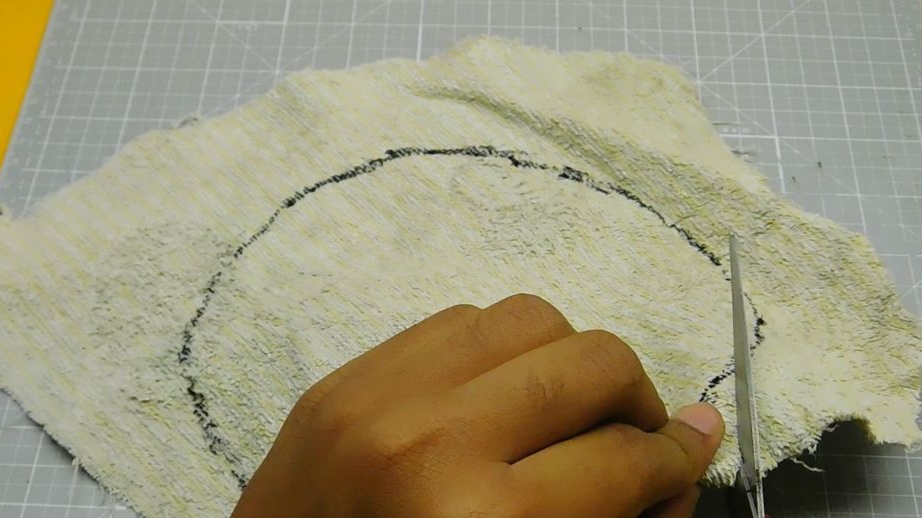
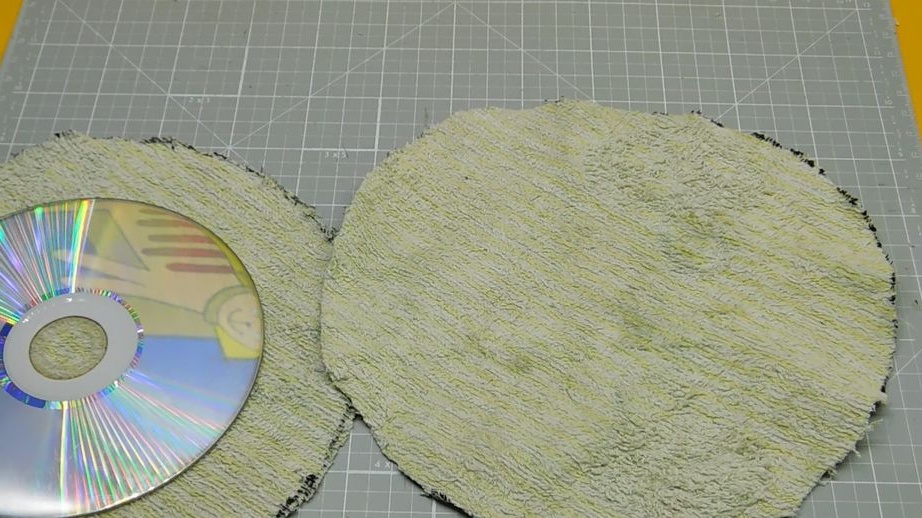
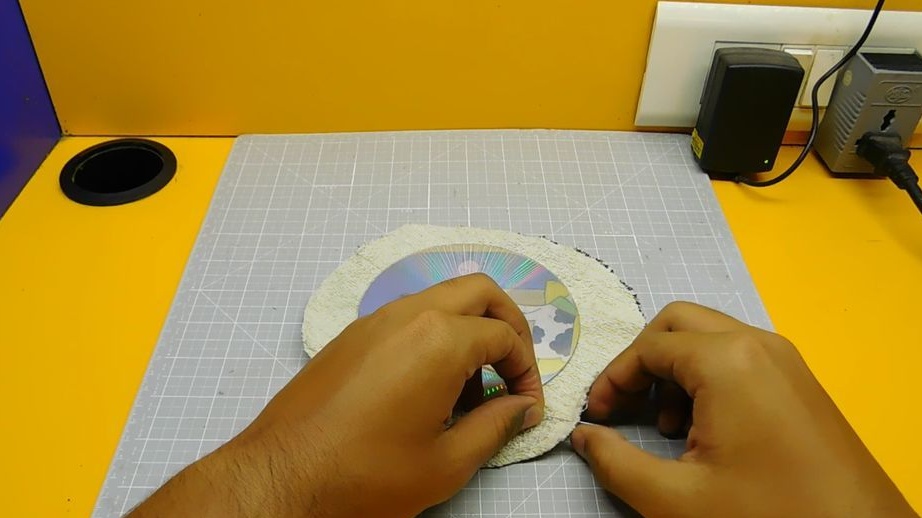
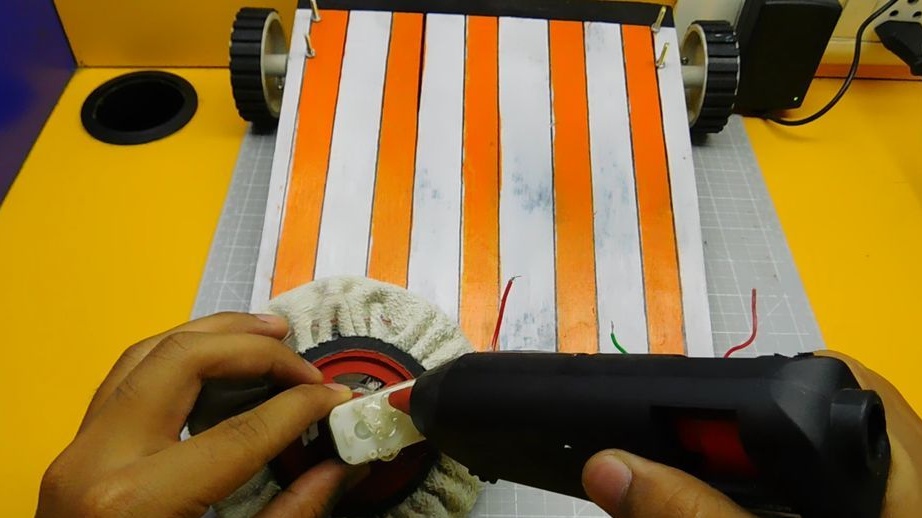
Trin to: Børster
Mesteren lavede børster fra gamle cd'er. Klip en klud. Hylsede hendes drev. Gentagen operation med en anden disk. Sikres skiverne med varmsmeltelim på gearmotorhjulet. Sikrede begge gearmotorer foran platformen.








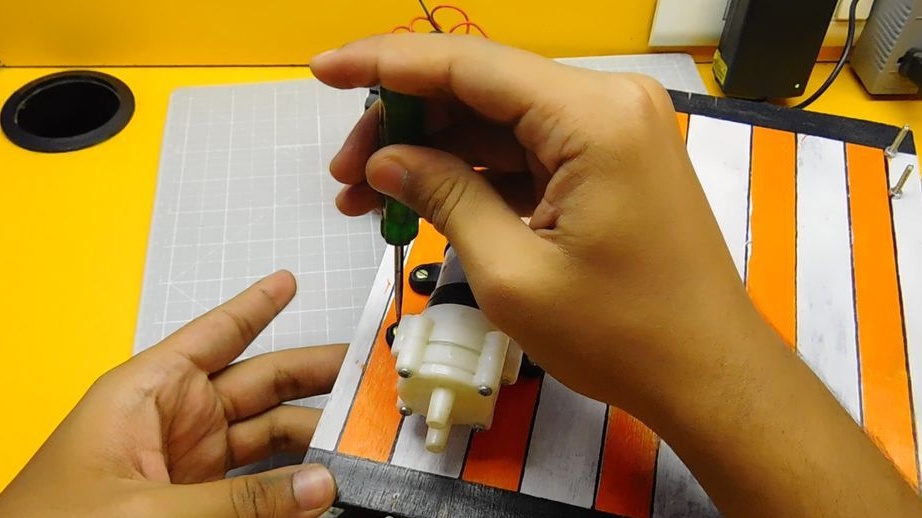
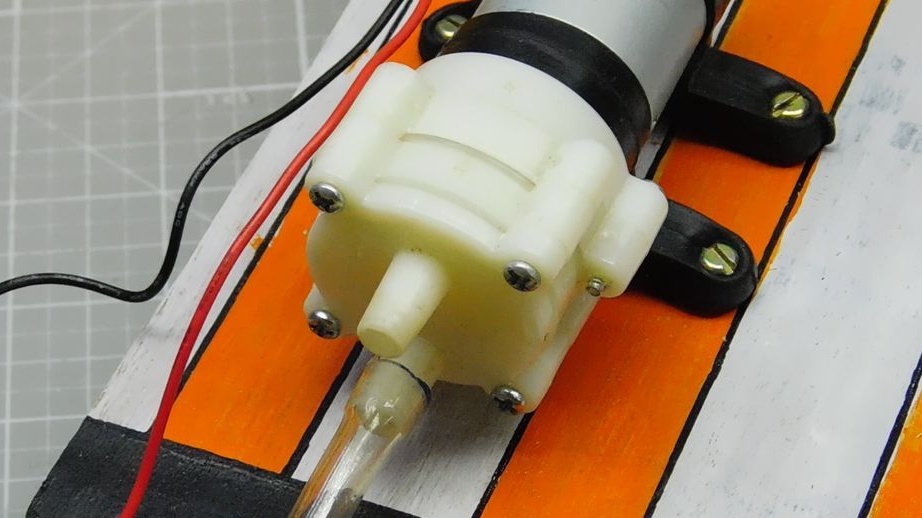
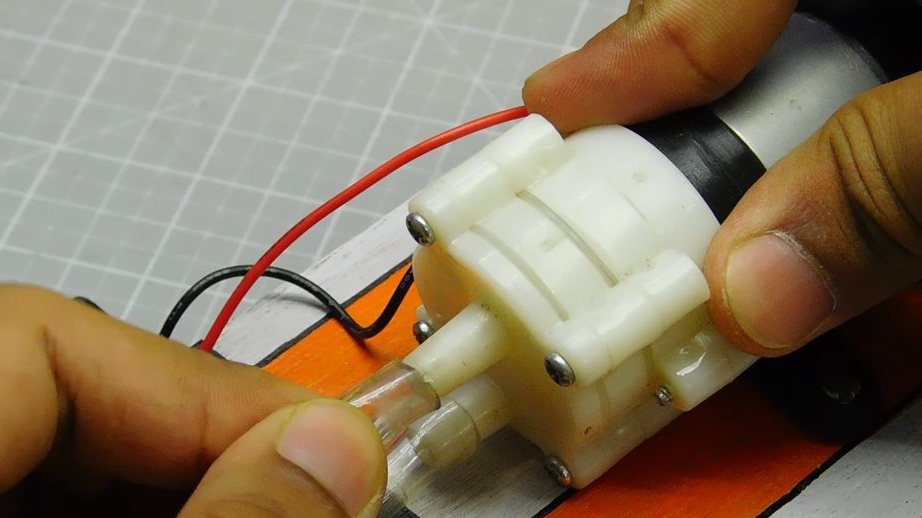
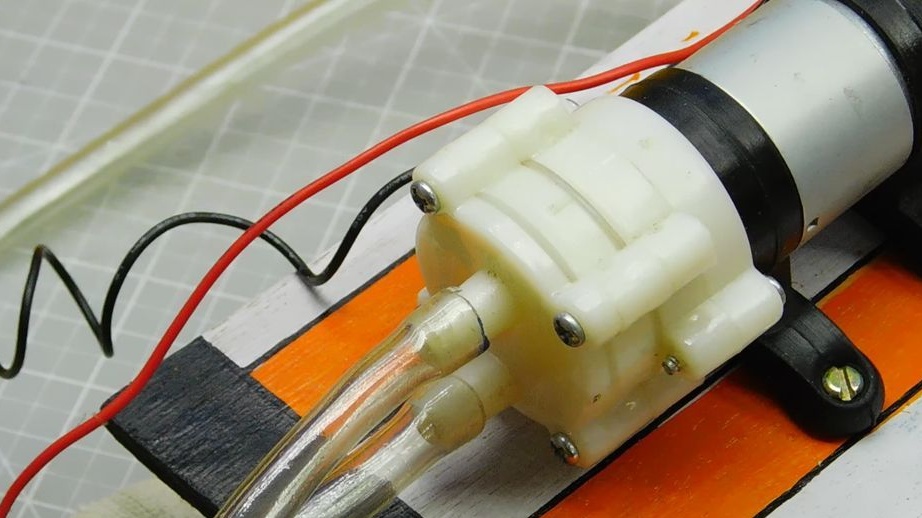
Trin to: vandforsyning
Fastgør pumpen til platformen. Skærer toppen af en plastflaske af. Fastgør flasken til platformen. Installerer et vandindtagsrør. Senere vil vandforsyningsrøret til børsterne blive fastgjort.




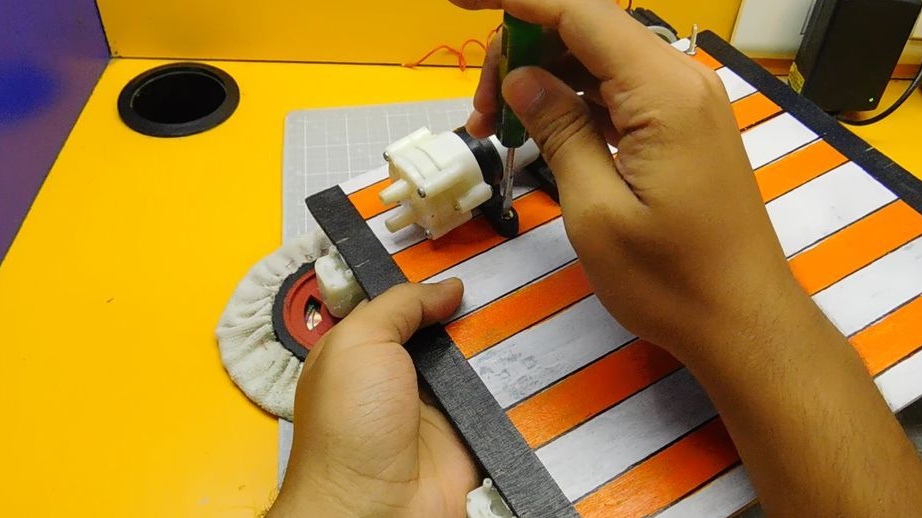
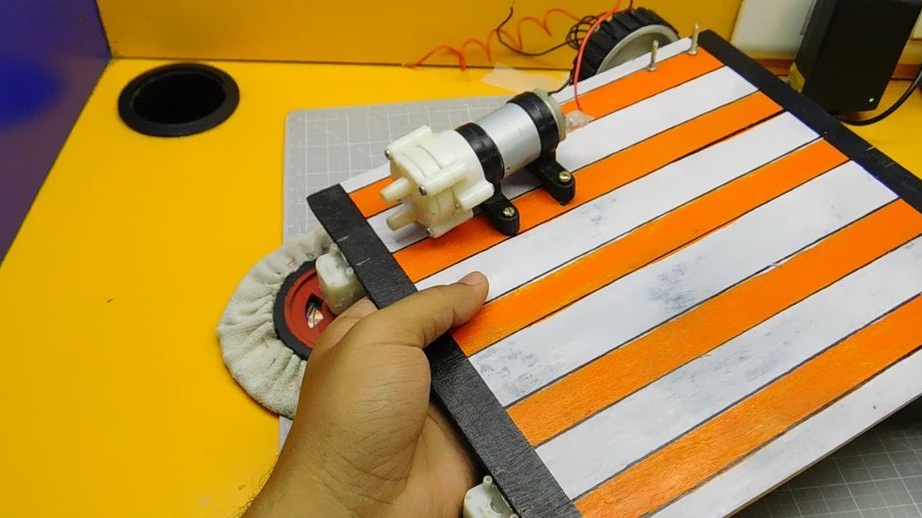




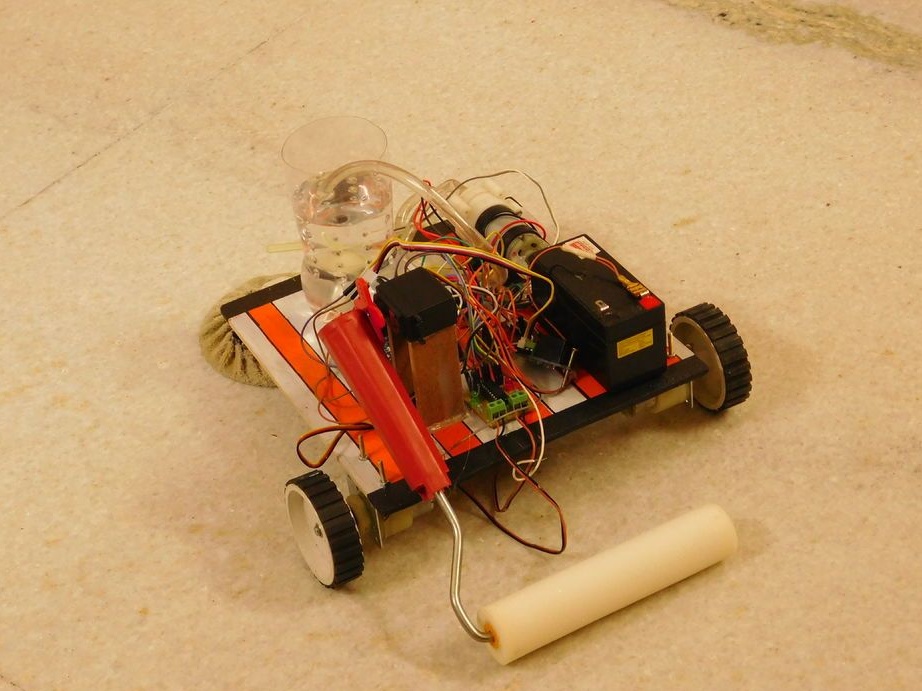
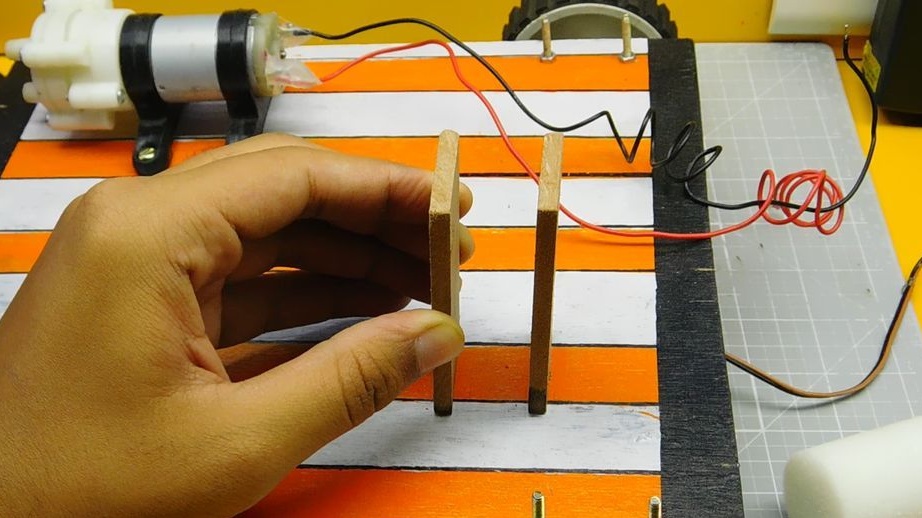
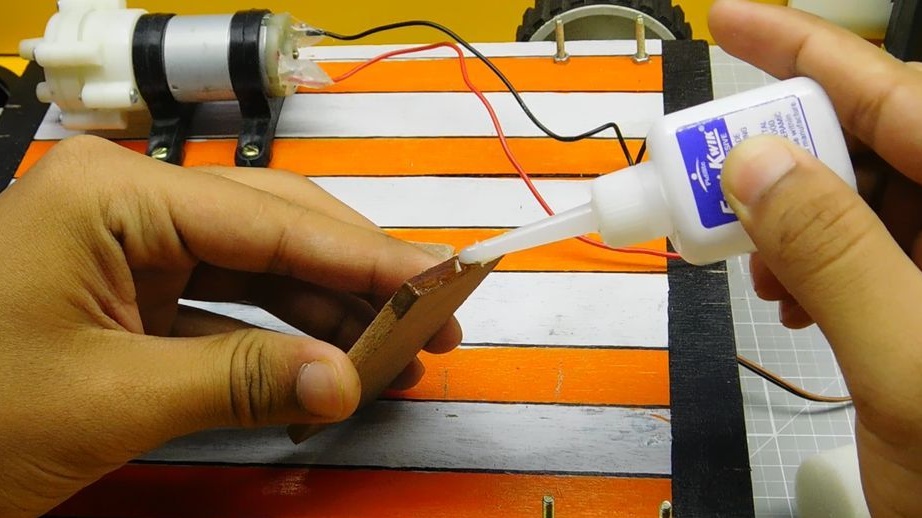
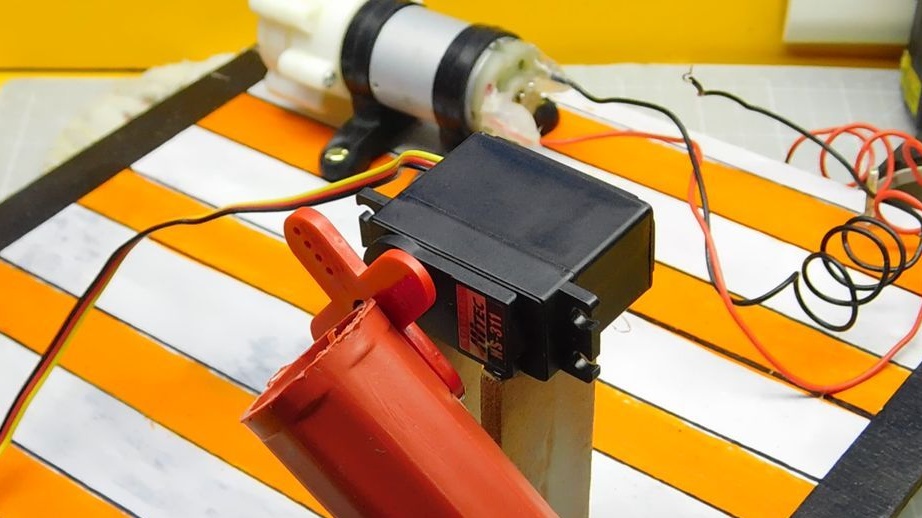
Trin tre: Rullehejsemekanisme
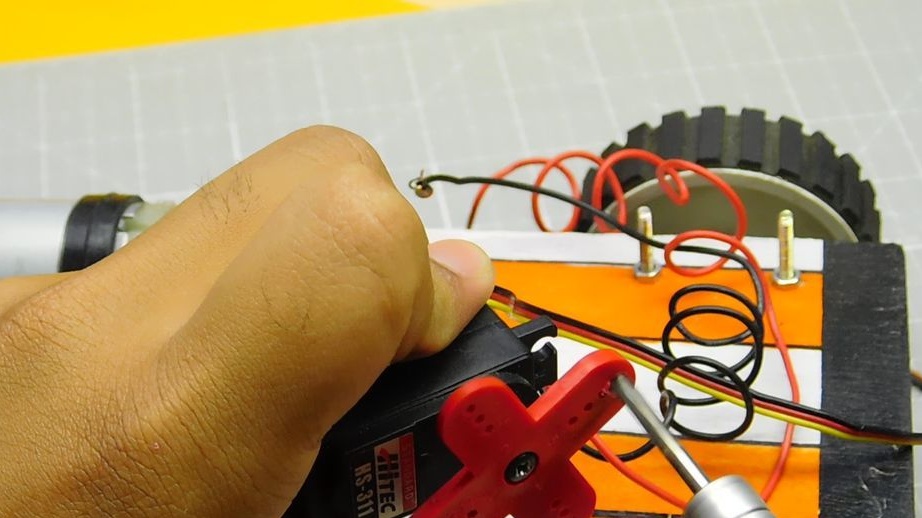
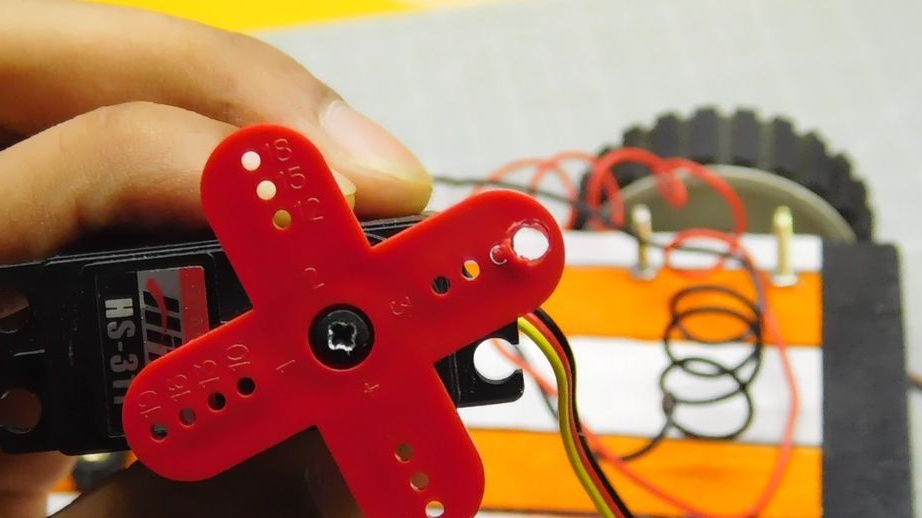
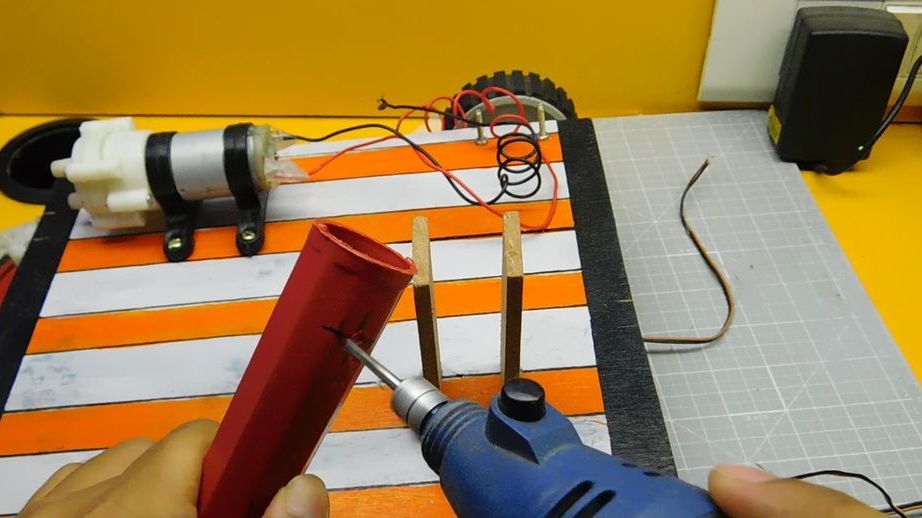
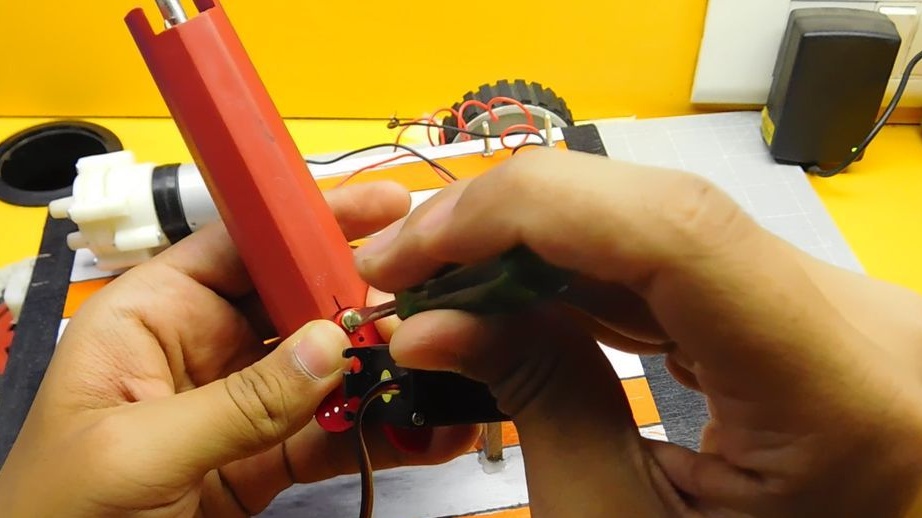
Rullens opgave er at opsamle fint støv. Da der nogle gange er behov for rullen, besluttede mesteren at lave en mekanisme til hævning og sænkning af rullen. Fastgør to lameller på platformen parallelt med hinanden. Laver to huller, den ene i servohåndtaget, den anden i rullehåndtaget. Skruer rullehåndtaget til håndtaget. Fastgør servoen til lamellerne.


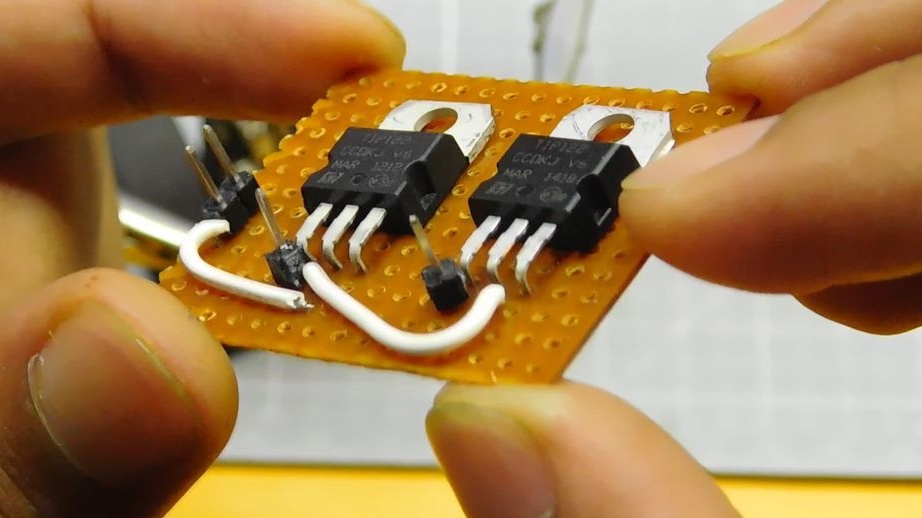
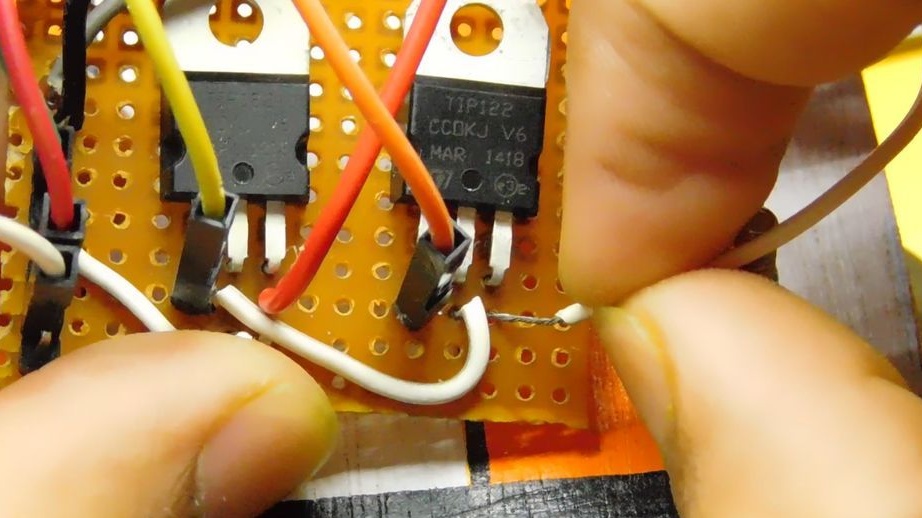
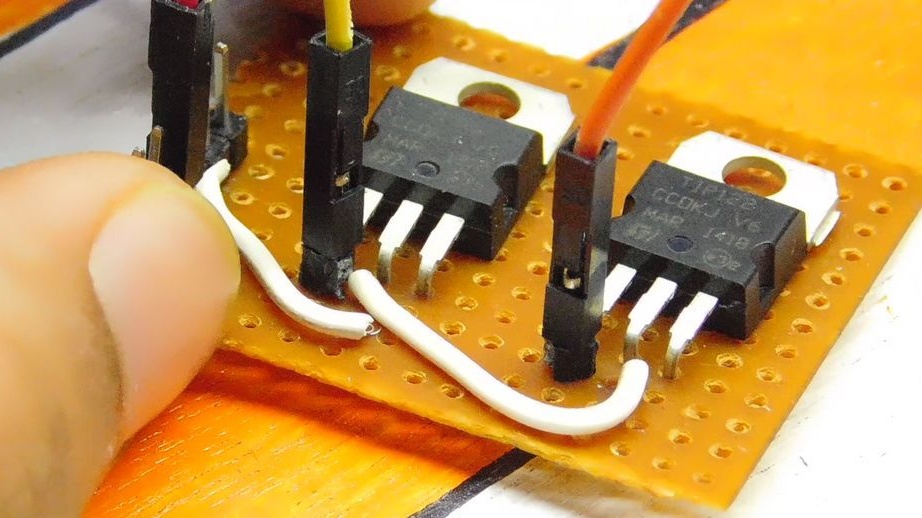
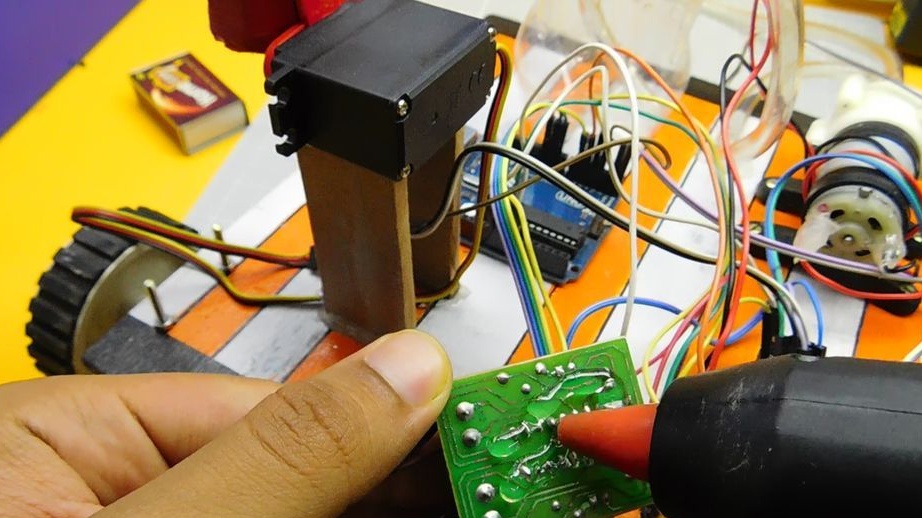
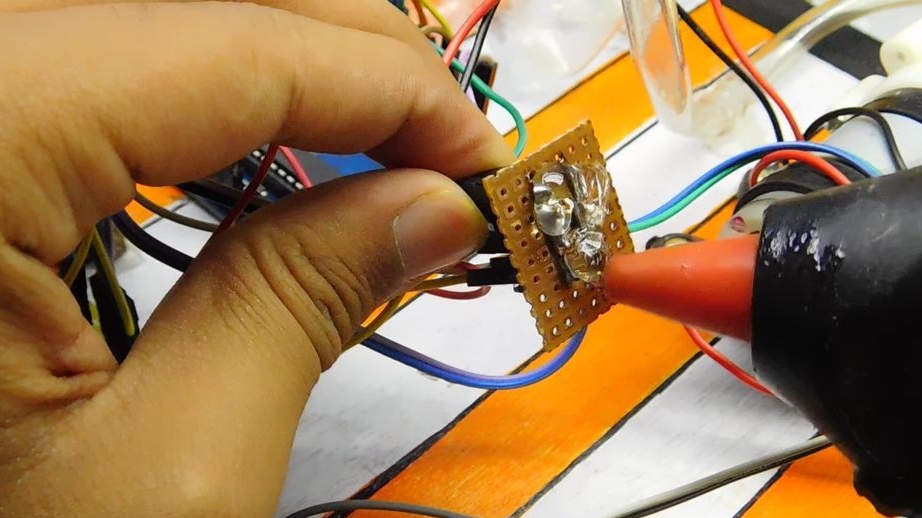
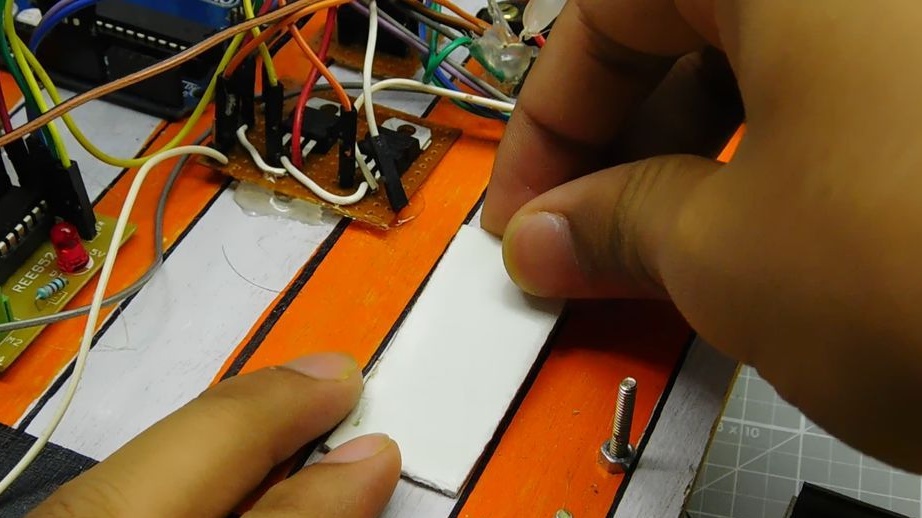
Trin fire: Transistor
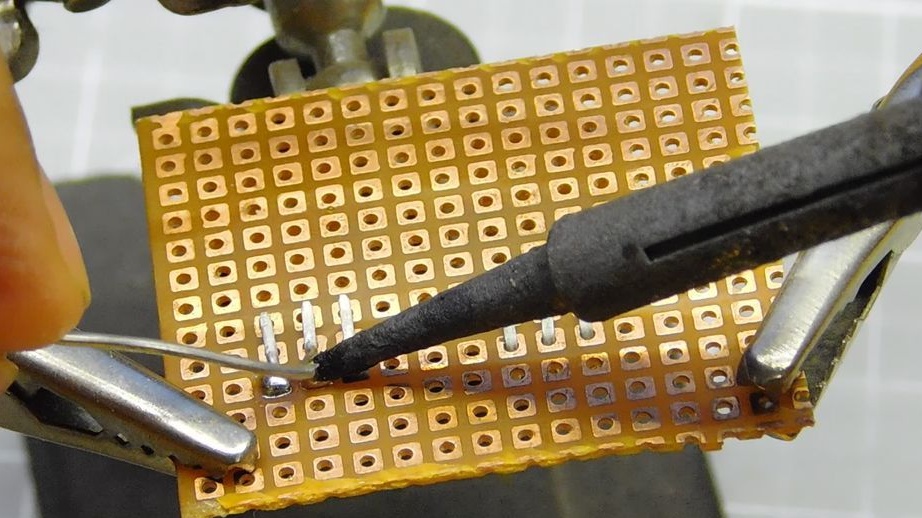
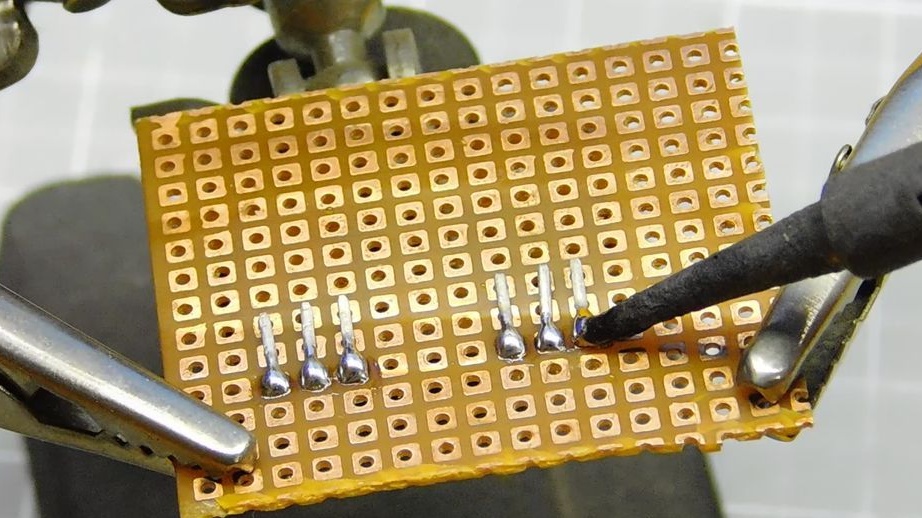
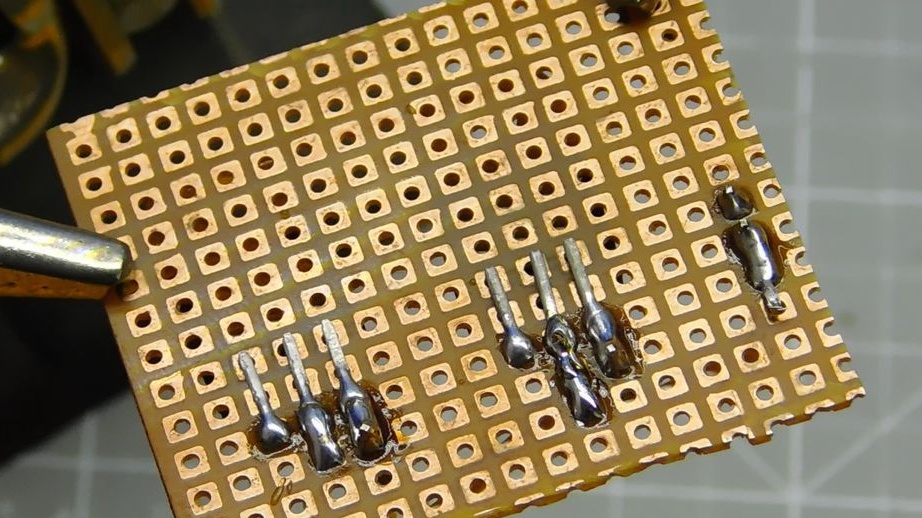
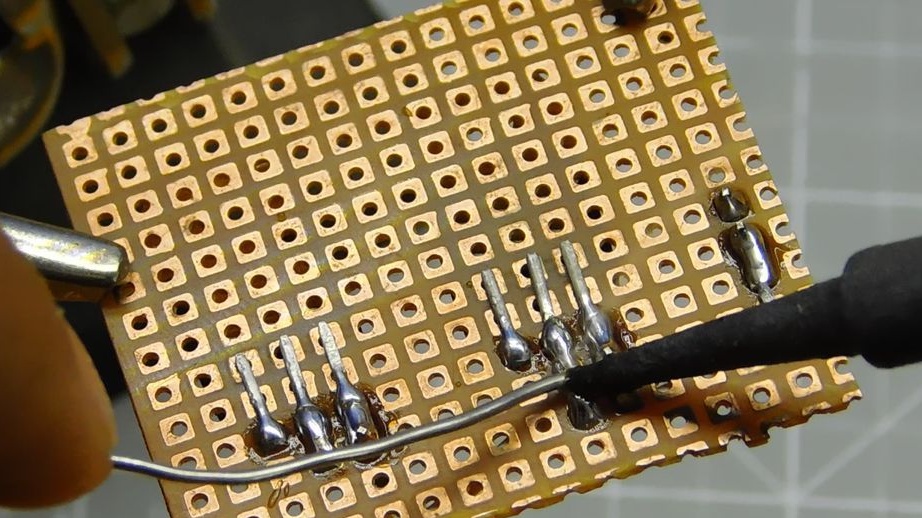
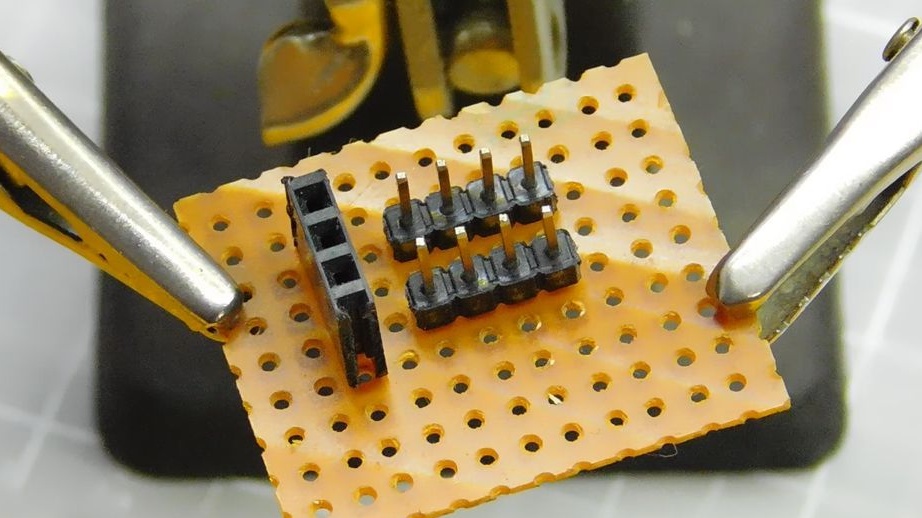
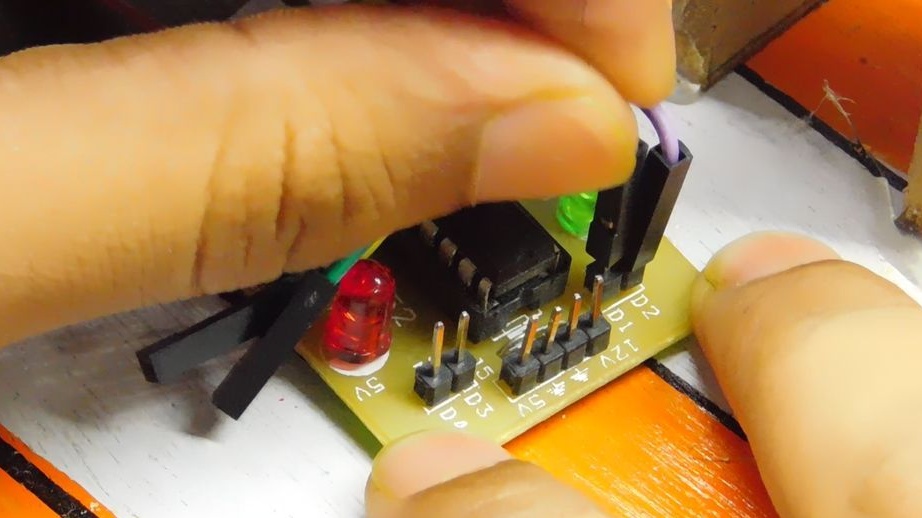
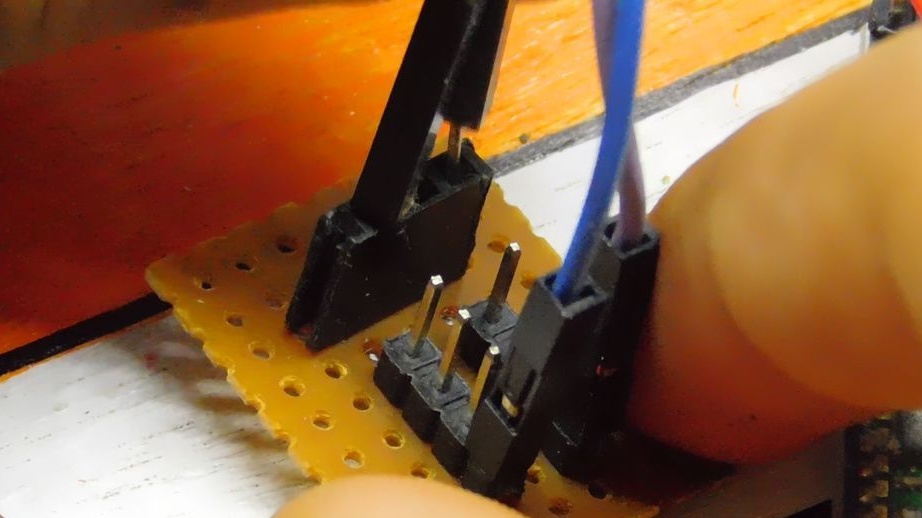
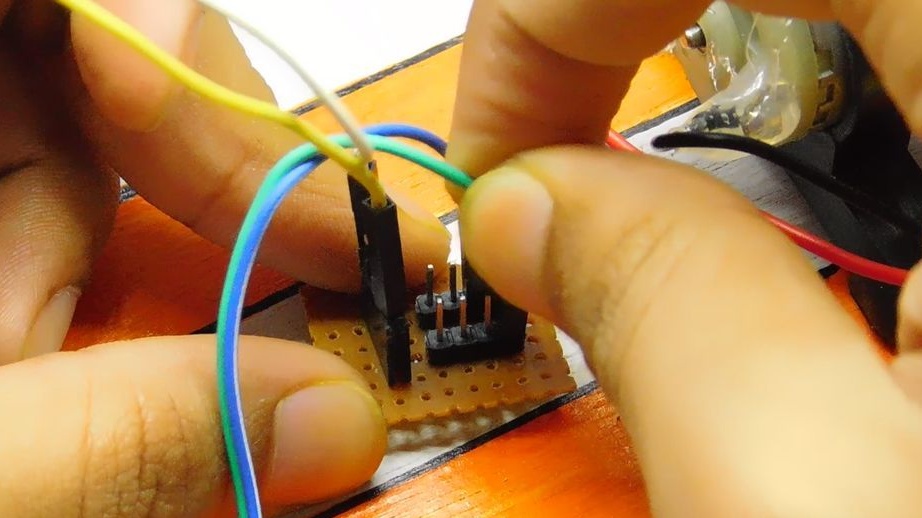
For en vandpumpe og motorer er der brug for 12 V. Strøm, men da Arduino kun giver ud 5 V, samler masteren kredsløbet på TIP122-transistoren.Guiden tilføjer også flere + 5V- og Gnd-stifter til kredsløbskortet.
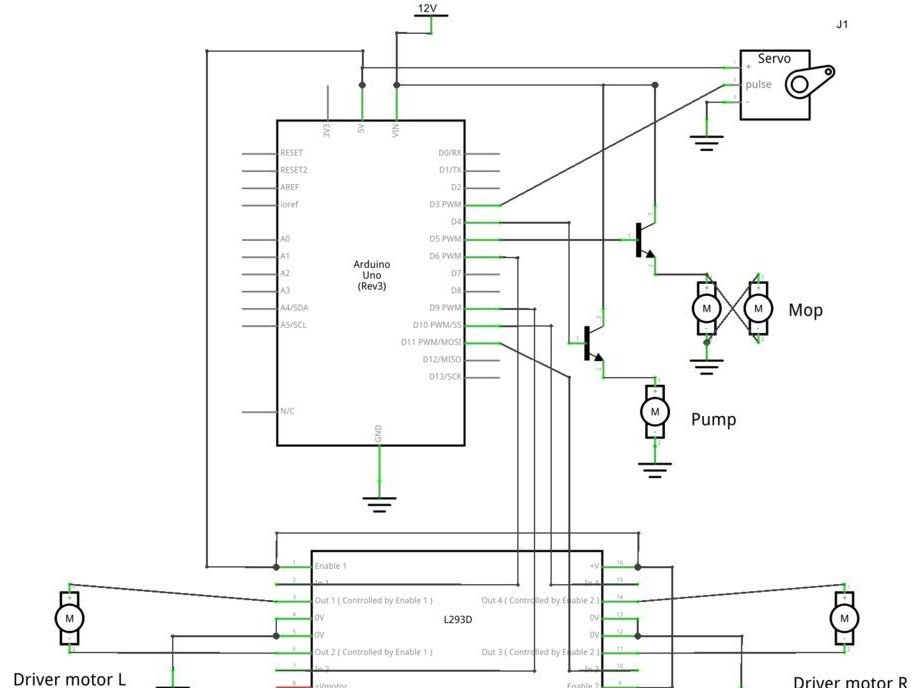
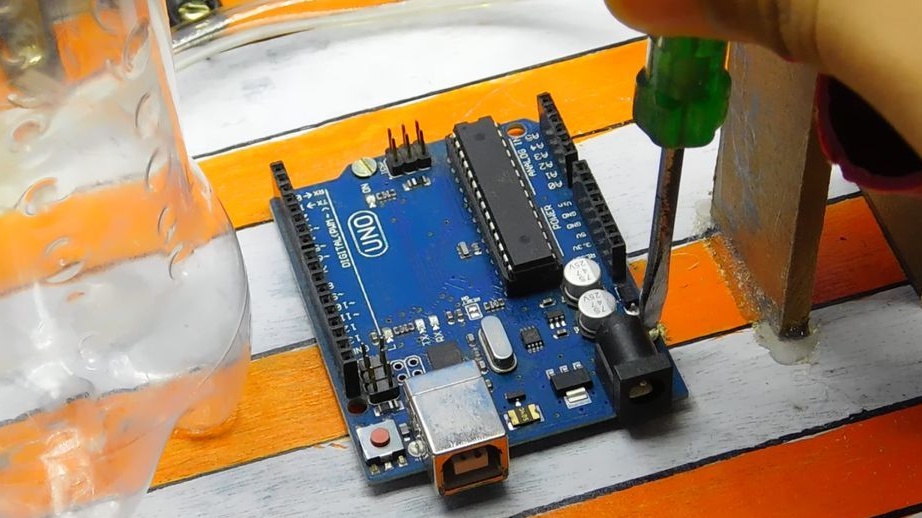
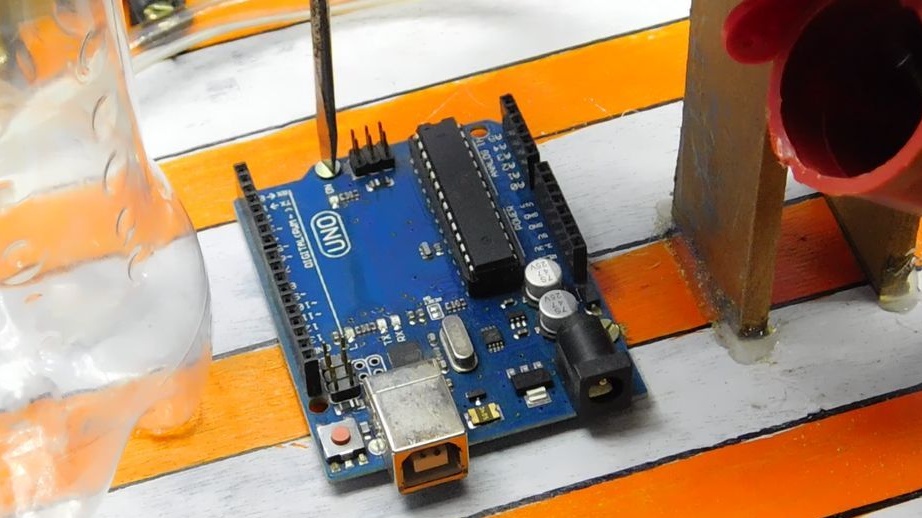
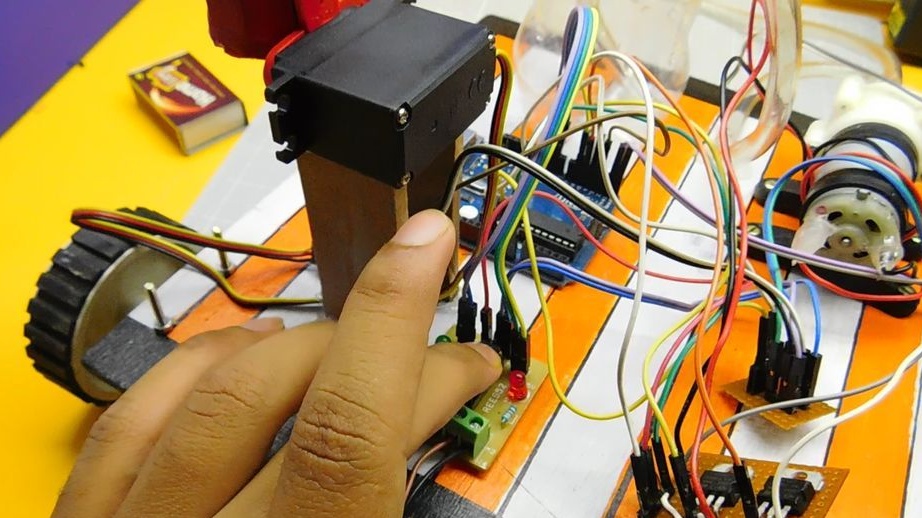
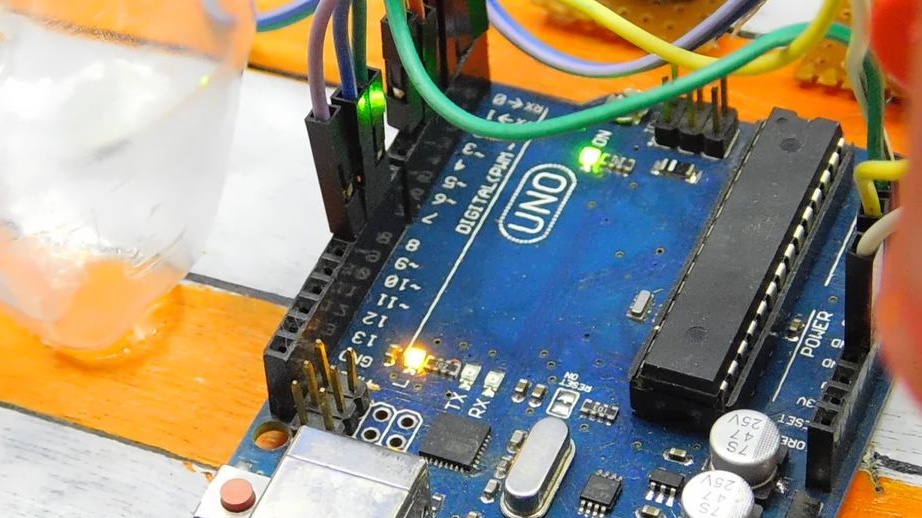
Trin fem: Installation af Arduino-kredsløbet
Fastgør Arduino til platformen og forbinder elektriske enheder til brættet.
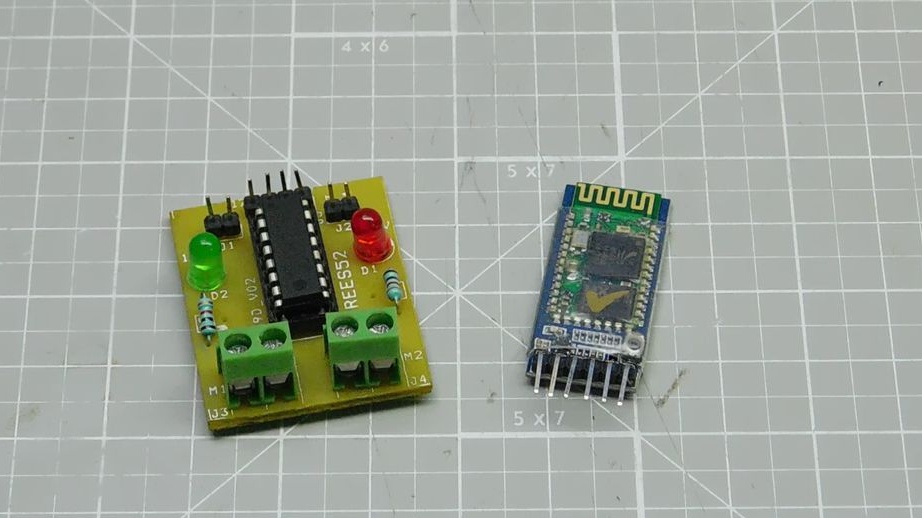
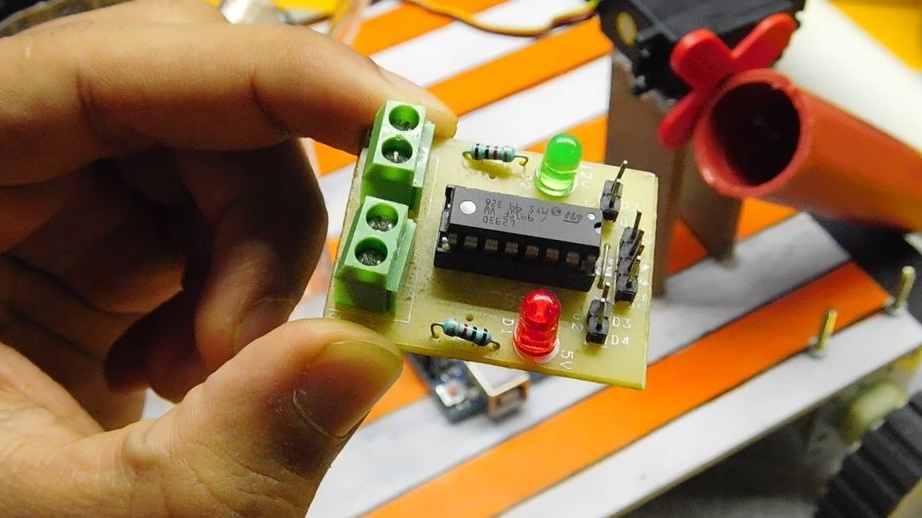
Motorstyringsmodul.
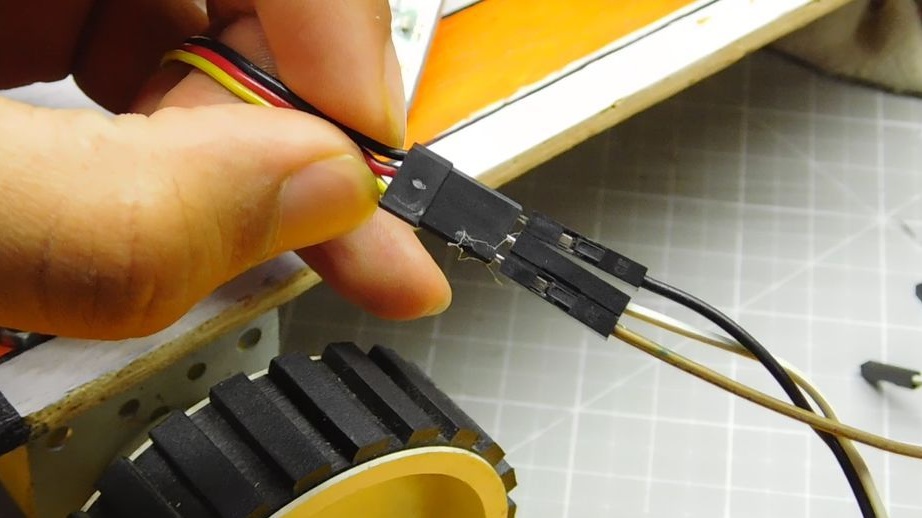
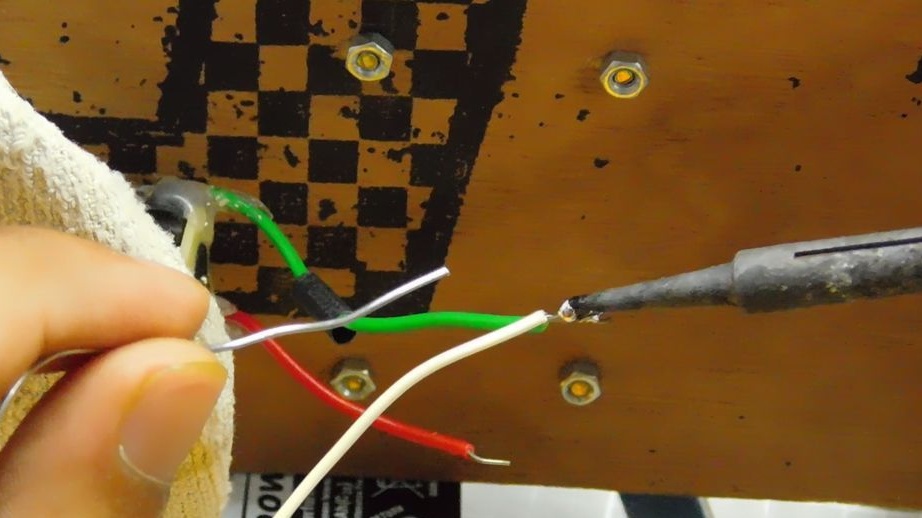
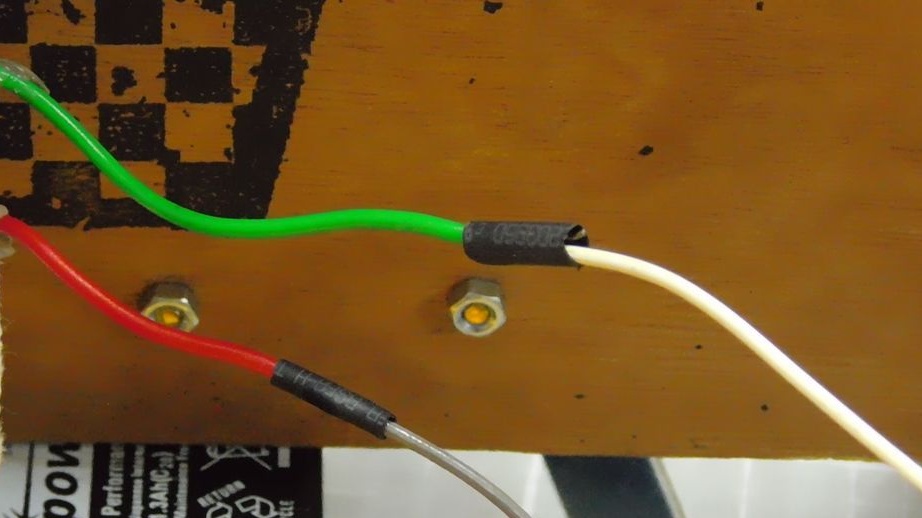
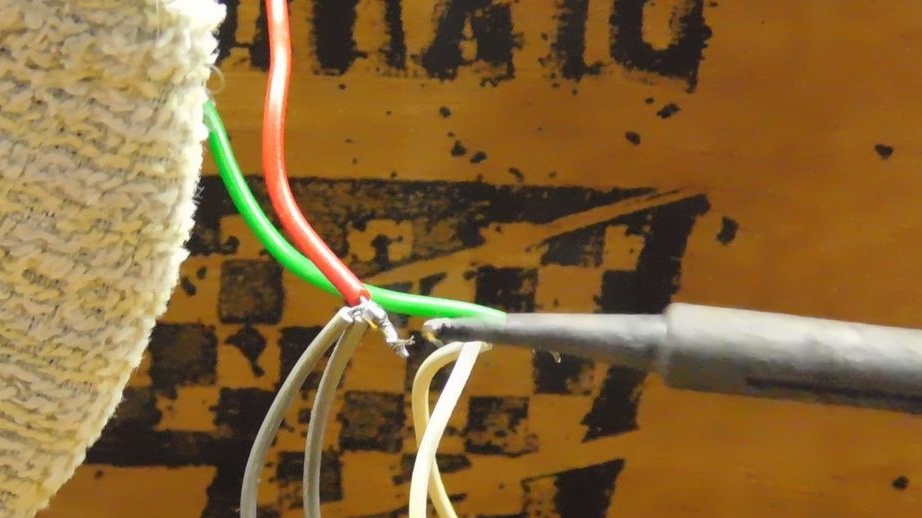
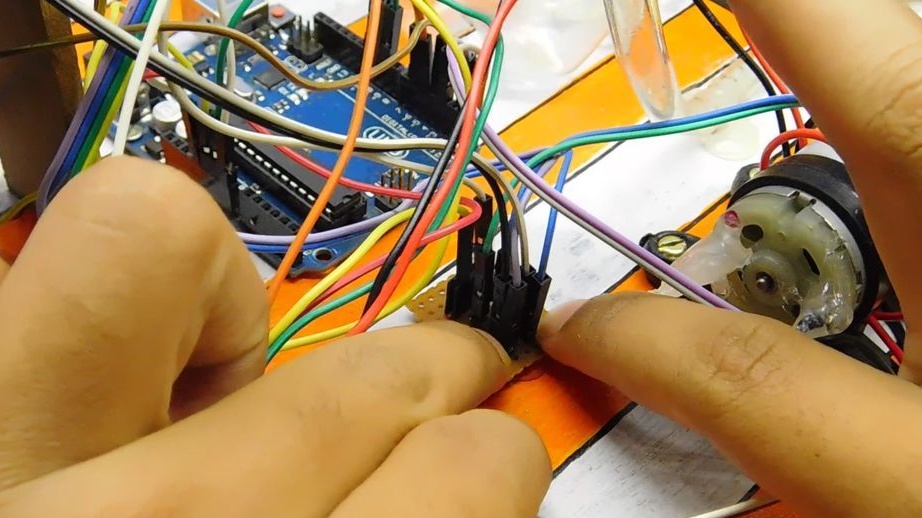
Det sælger til motorerne (hvorpå hjulene er fastgjort til bevægelse, ikke børsterne) ledninger. Fastgør ledningerne i modulets monteringsstik. Tilslut derefter modulet til Arduino som følger.
Modul ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd -Gnd
+ 12V-modul tilsluttes batteriet.
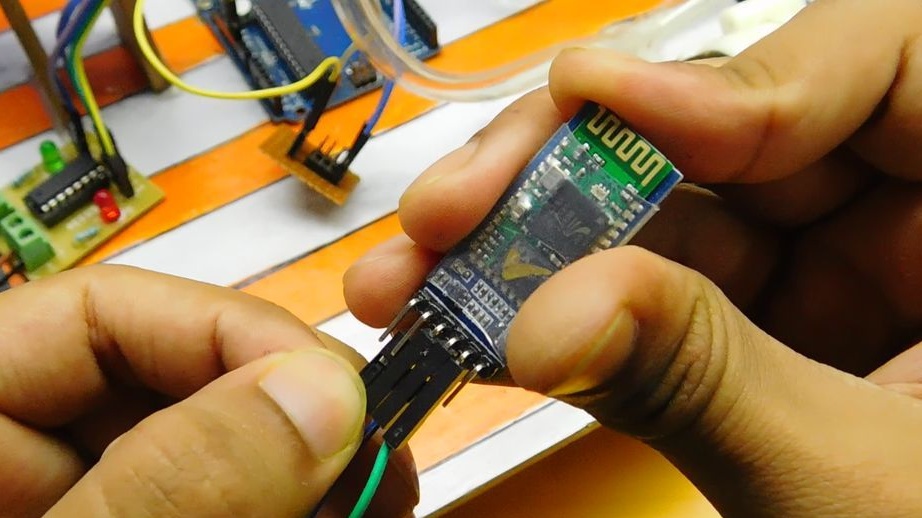
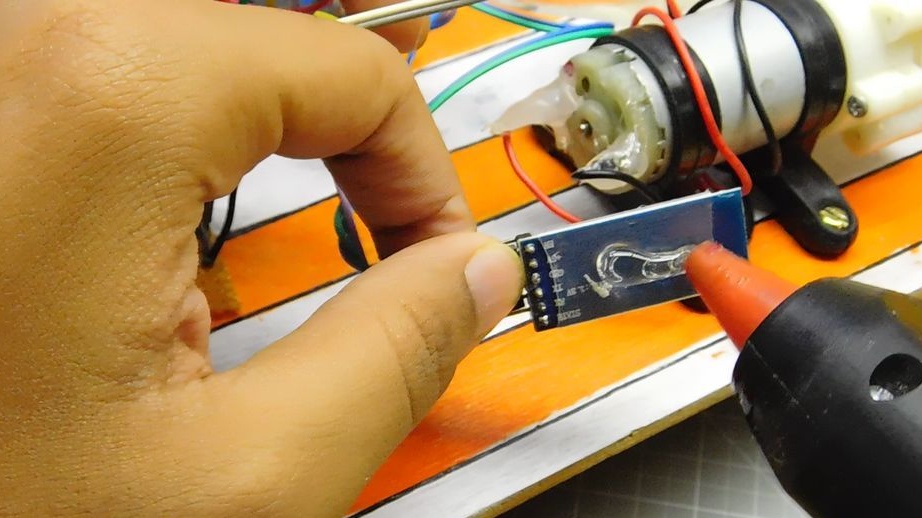
Bluetooth-forbindelse.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Servomotor ::: Arduino
Vcc - + 5V
Gnd - gnd
Signal - D3
Derefter forbindes pumpen og børstemotorerne i henhold til skemaet. Børstemotorer tilsluttes parallelt og drejes i forskellige retninger, højre med uret og venstre mod uret.

Trin seks: Fastgørelsesdele til robotdele
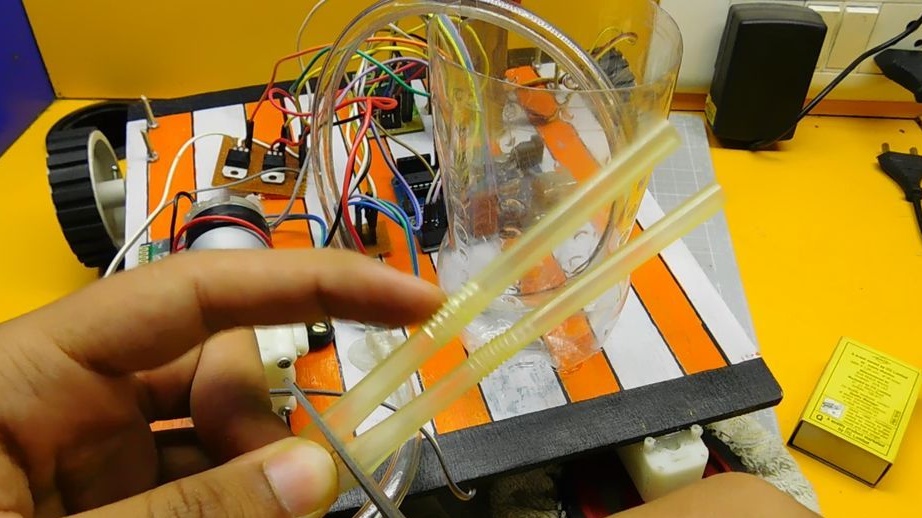
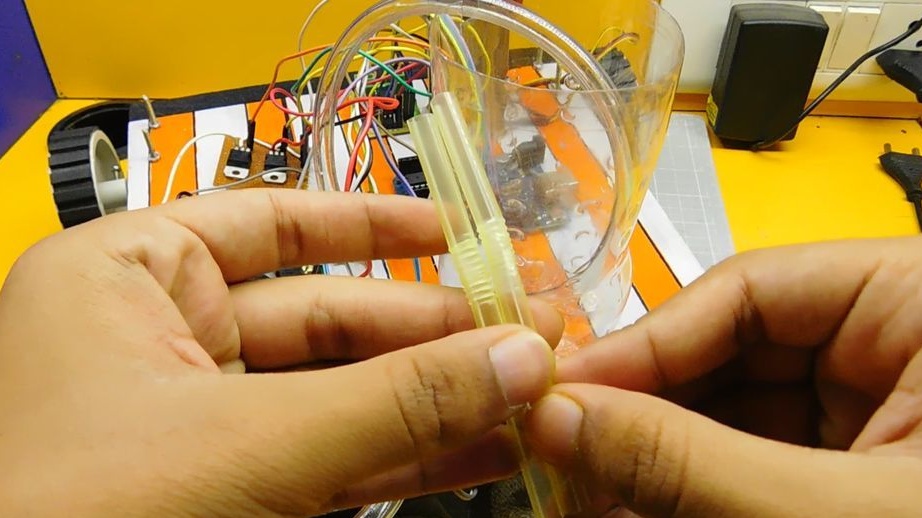
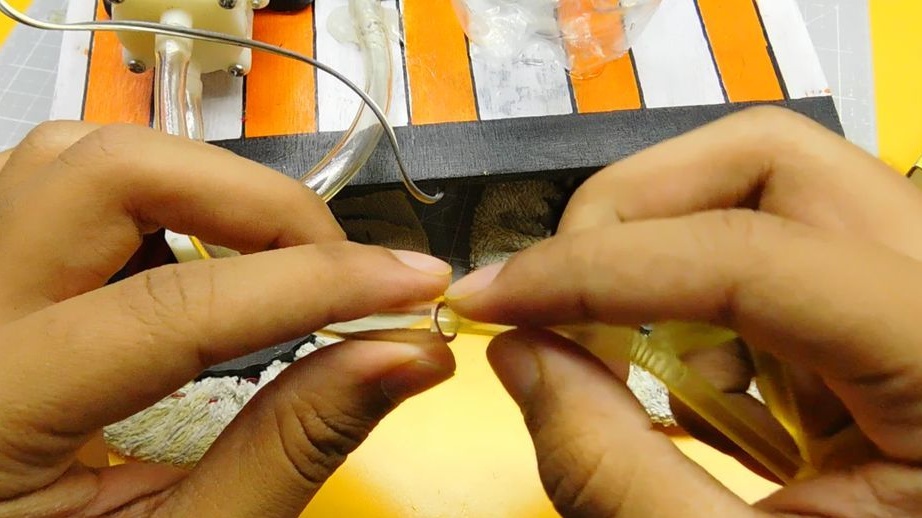
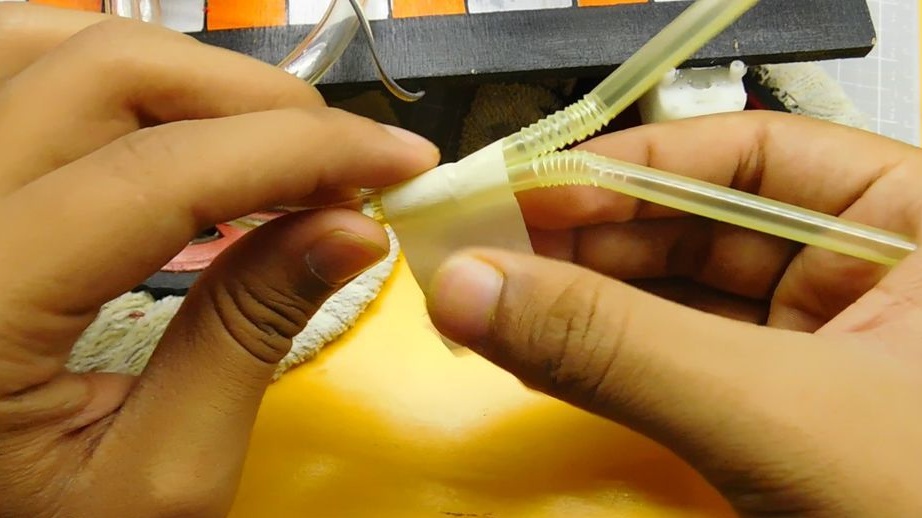
Skiver to cocktailstrå på ca. 7 cm hver. Sæt stråene i vandforsyningsrøret. Fastgør sugerør foran børster.




Låse på platformen elektronisk komponenter.

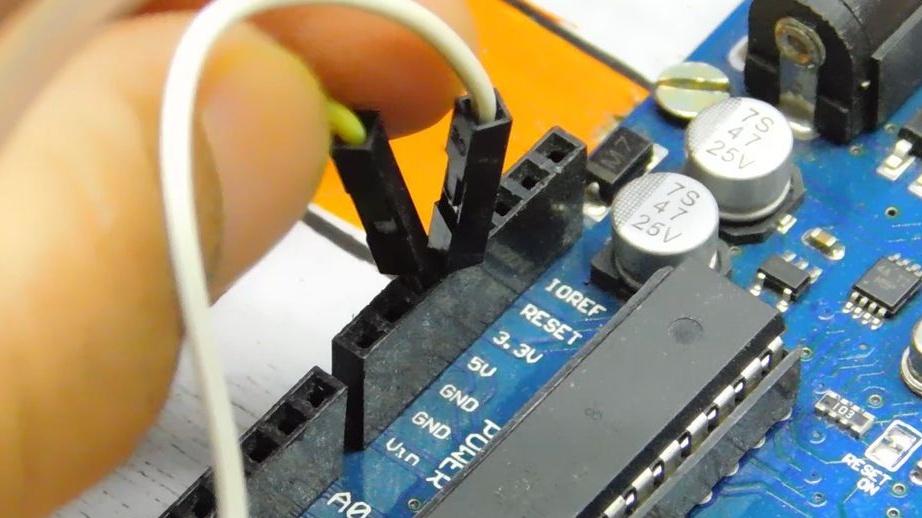
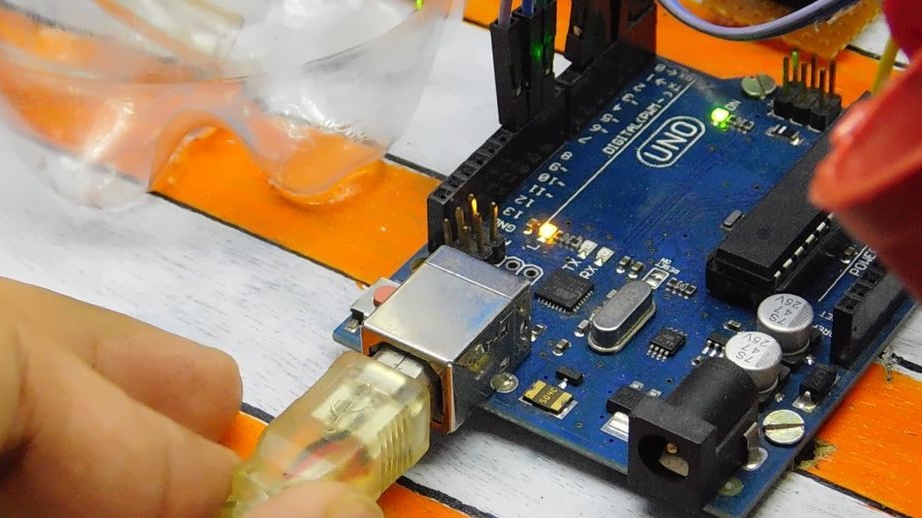
Trin syv: download koden
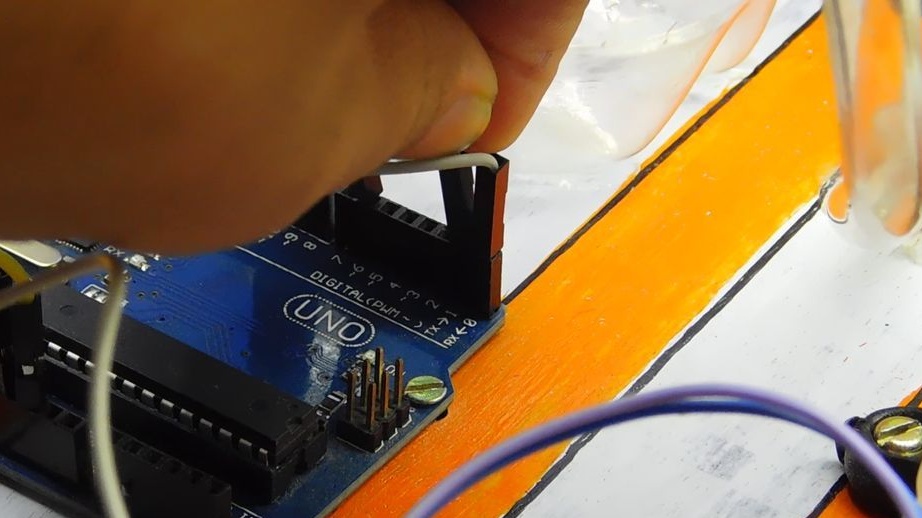
Fjerner Rx- og Tx-springerne fra Arduino-brættet. Tilslutter brættet til en computer. Indlæser koden. Sætter springere på plads. .
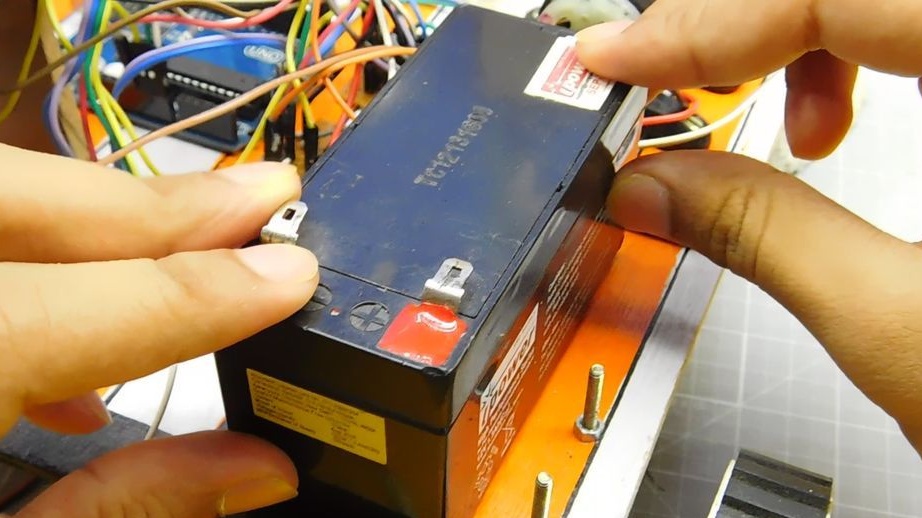
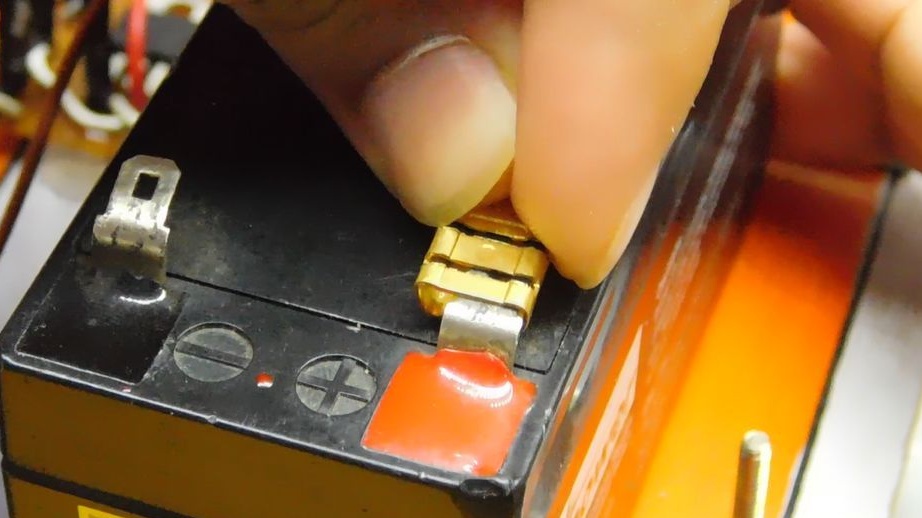
Trin otte: Batteri
Sikrer batteriet på platformen ved hjælp af dobbeltsidet bånd. Tilslutter elektroniske enheder til batteriet. Arduino-master rådgiver at oprette forbindelse via en spændingsdeler. Du kan også tilføje en switch til kredsløbet.

Trin ni: styr robotten
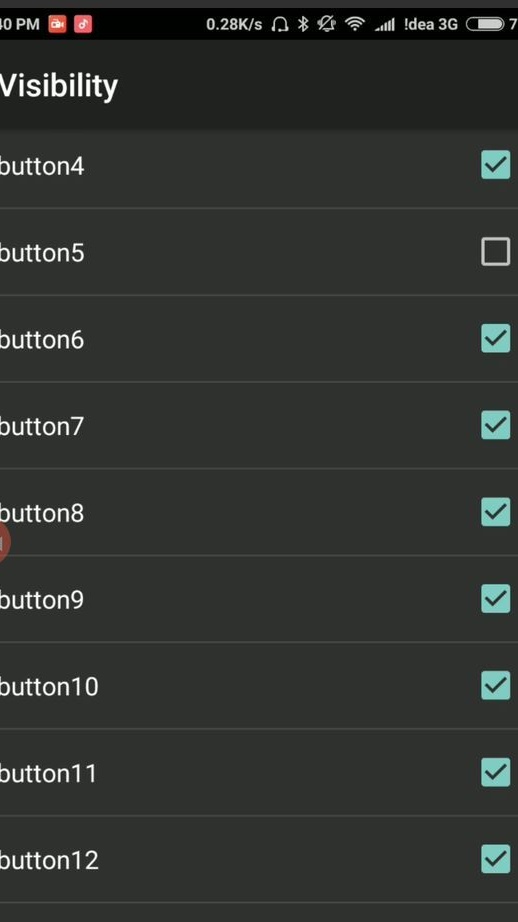
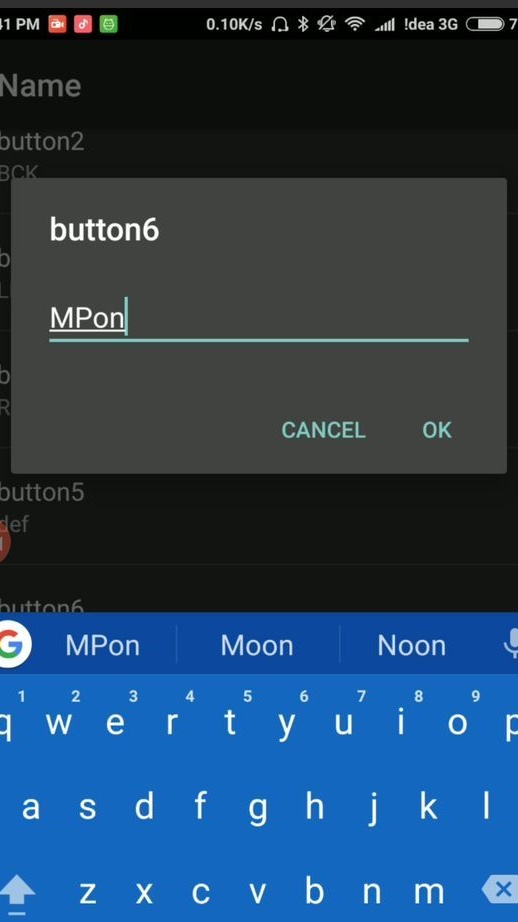
Fra Google Play downloader guiden applikationen 'Bluetooth Serial Controller'. Åbner applikationen. Går til indstillinger> synlighed. Deaktiverer knapper 5, 9, 12. Går til navne. Tildeler en knap på 2-3 bogstaver til hver knap. Se foto nedenfor.
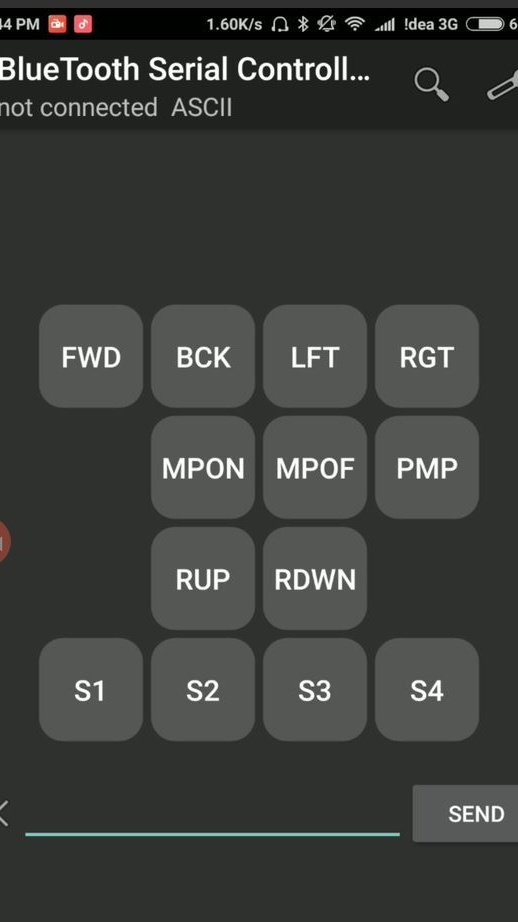
Derefter installerer hver knap en kommando (tilbud skal fjernes, skift ikke sag):
Knap 1 (FWD): 'F'
Knap 2 (BCK): 'B'
Knap 3 (LFT): 'L'
Knap 4 (RGT): 'R'
Knap 6 (MPON): 'M'
Knap 7 (MPOF): 'm'
Knap 8 (PMP): 'P'
Knap 10 (RUP): 'U'
Knap 11 (RDWN): 'u'
Knap 13 (S1): '1'
Knap 14 (S2): '2'
Knap 15 (S3): '3'
Knap 16 (S4): '4'
I stopkommandoer> kommandoer tildeles kun kommandoer til disse knapper:
Knap 1: 'S'
Knap 2: 'S'
Knap 3: 'S'
Knap 4: 'S'
Knap 8: 'p'

Nu gjenstår det at oprette forbindelse til Bluetooth-modulet ("HC-05"), indtaste adgangskoden (1234 eller 0000), og du kan prøve at rense rummet -)))
Tak til master-masteren, og vi ønsker ham at forbedre roboten og få fuldstændigt autonomt arbejde fra den.
Hele monteringsprocessen af robotrenseren kan ses i videoen.