



Denne artikel vil dække, hvordan man fremstiller gør det selv robot kunstner. Selvfølgelig har du sådan et billede roboten vil ikke tegne, men overraske bekendte eller venner med ham homebrew kvist det er muligt. Og hvis du samler en sådan robot med dine børn, vil dette utvivlsomt hjælpe med at udvikle kreative karaktertræk.
Værktøjer og materialer:
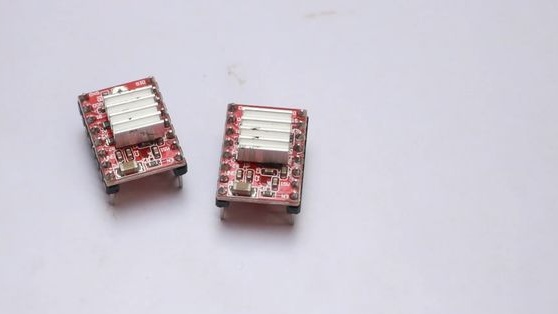
-To LED-drev;
-Bord 3 mm;
-Pila;
-Kley;
-
-
-
-
-
-Computer;
- skruetrækker;
-Loddejern:
-Smazka:
-Lineyka;
-Karandash;
-Drel;
-Limpistol;
-Skrive pen;
- saks;
-Pruzhina;
-Nitka;
- Batteri 12V;
seeing-;
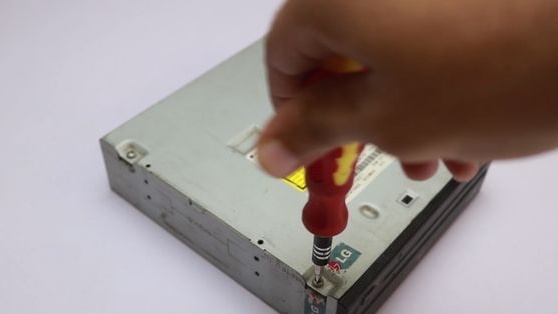
Trin 1: LED-drev
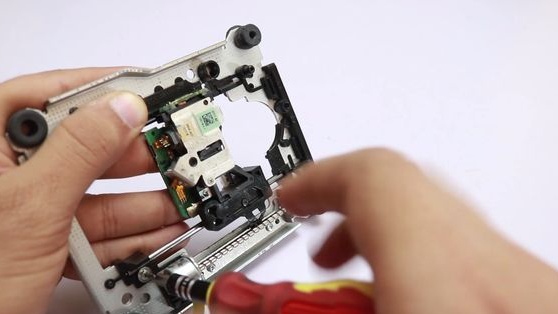
Parses cd-drev. Fjerner dæksler, elektronikplade.




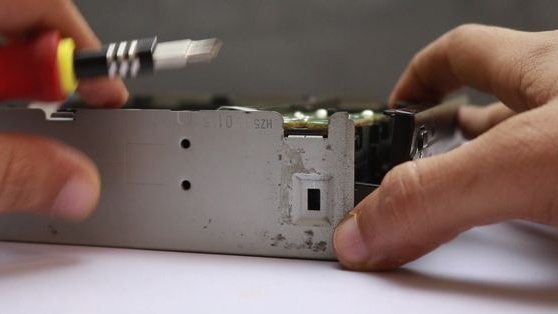

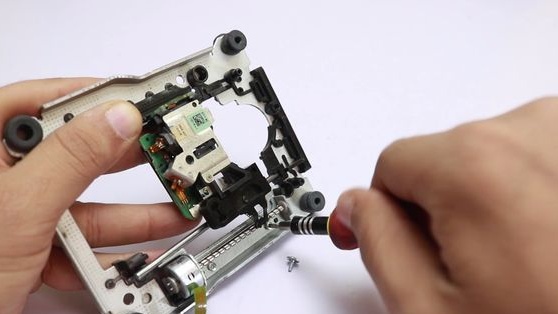
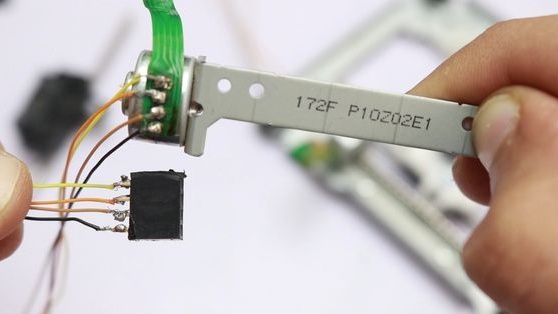
Fjerner en ramme med en vogn og en trinmotor fra huset.
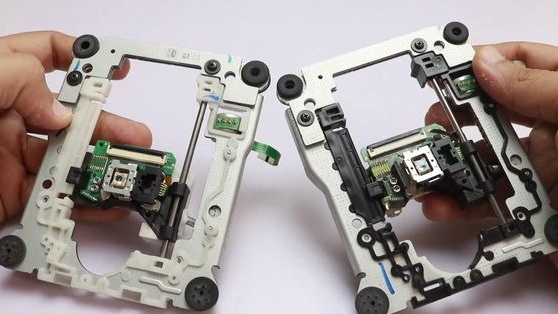
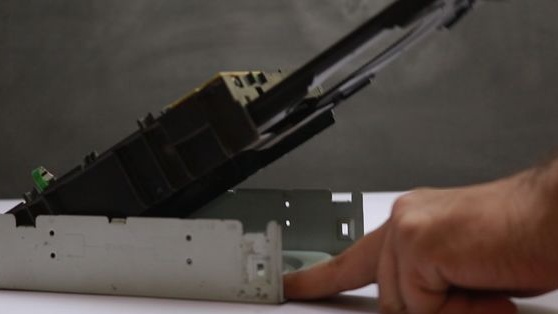
Hun lægger den ene ramme, analyserer den anden.
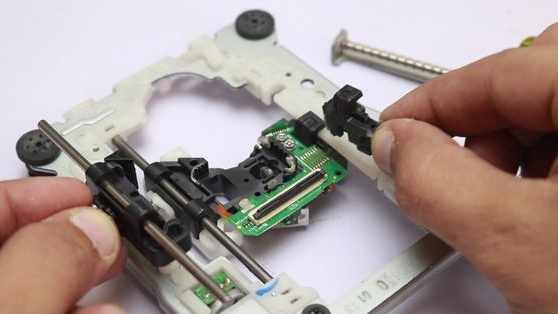
Fra det andet CD-drev er det kun nødvendigt med en vogn og en trinmotor.


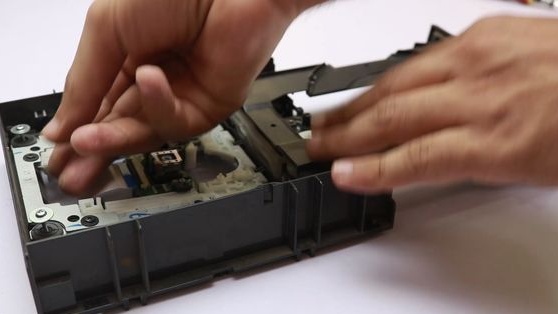
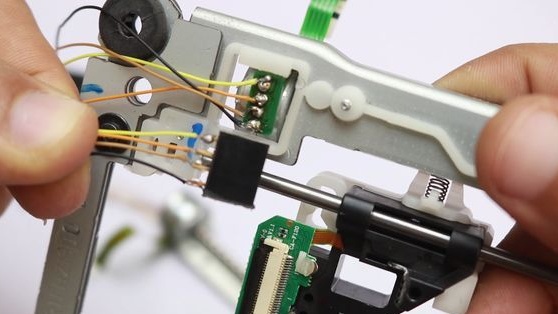
Smør vognen.
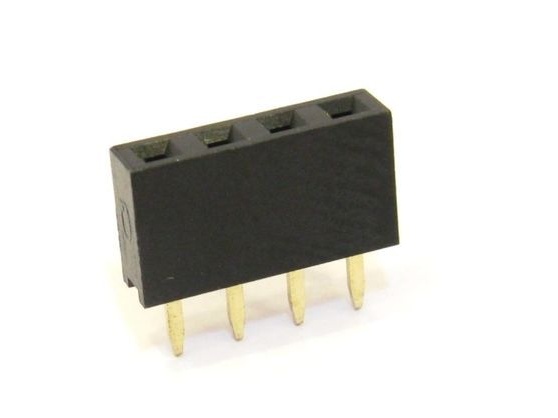
Soldater til trådstegsmotorer. Stikket er loddet til trådens anden ender.
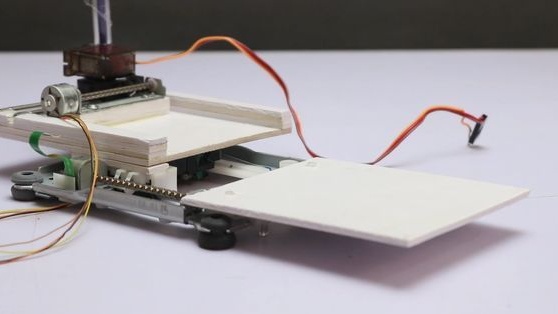
Trin to: X-akse og Y-akse
Så et bord (yderligere bordet) af 10 * 9 cm. Ved bordets kanter limes stængerne 2 * 10 cm.
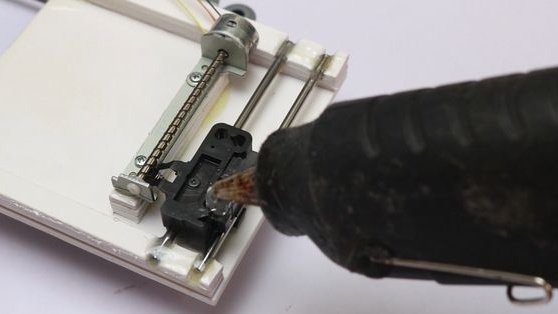
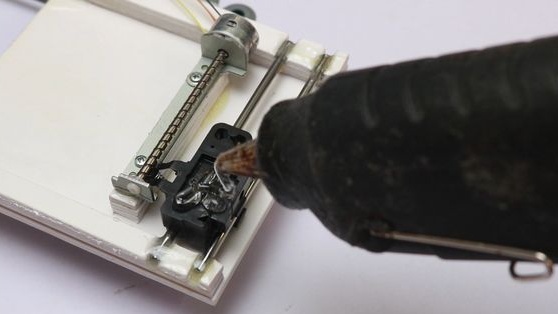
Skær spor til vognføringer. Lim guiderne.

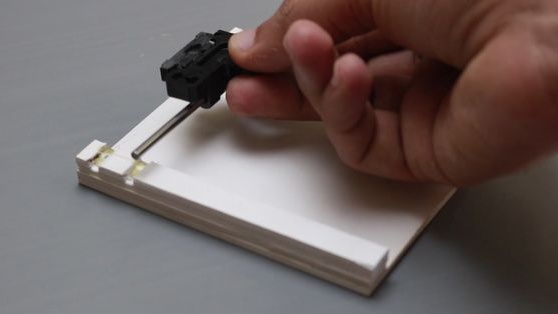
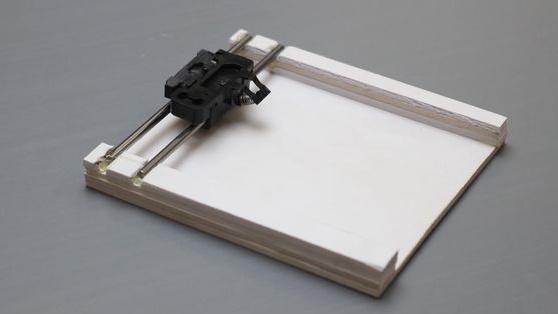
En blok på 3 * 5 cm limer ved siden af vognen Skruer på trinmotoren. Axis X er klar.
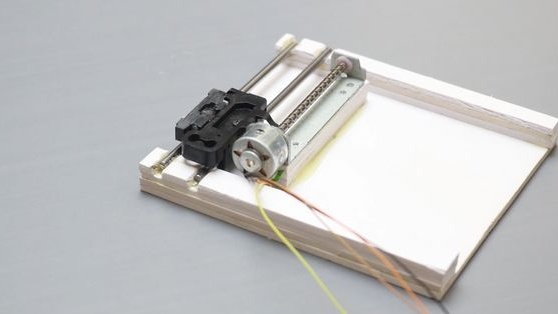
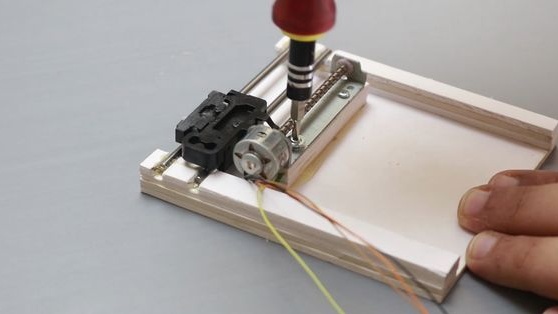
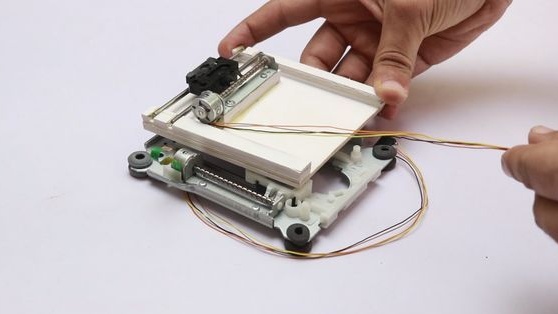
Limer X-aksemekanismen med Y-aksemekanismen.

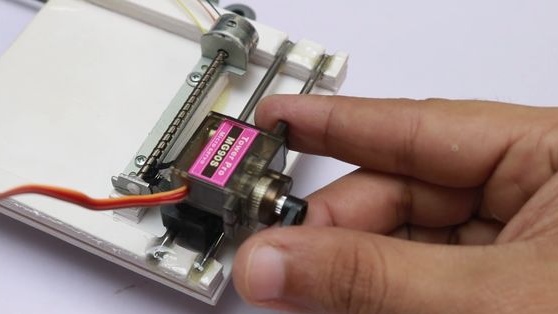
Fastgør servo-drevet til vognen med skaftet udad (se foto)
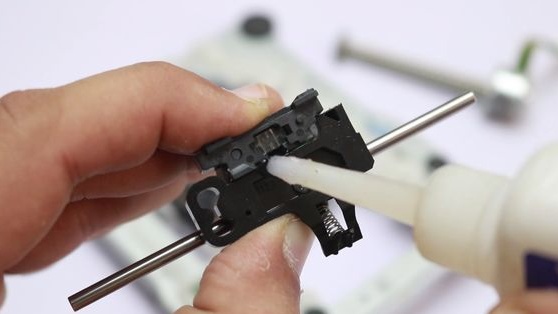
Trin tre: Pen
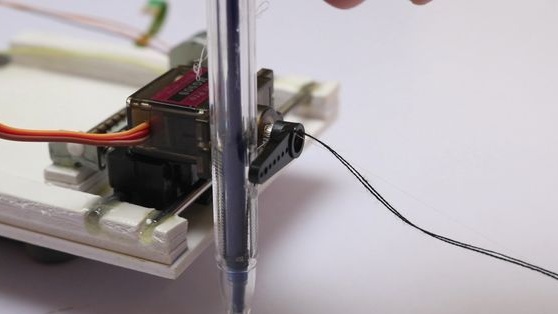
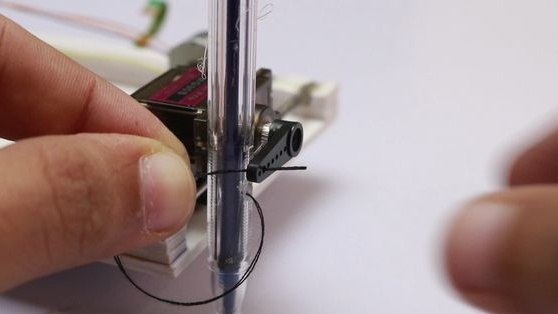
Analyser en pen. Skærer 1 cm. Fra den øverste ende af skaftet. Drej fjederhalvdelen på stangen. Efter at have trukket sig tilbage ca. 1 cm fra bunden af stangen, skal du trække en tråd på den. Slips. I håndtaget laves et hul. Trækker tråden ind i hullet. Installer stangen på plads. Indstiller hætten.






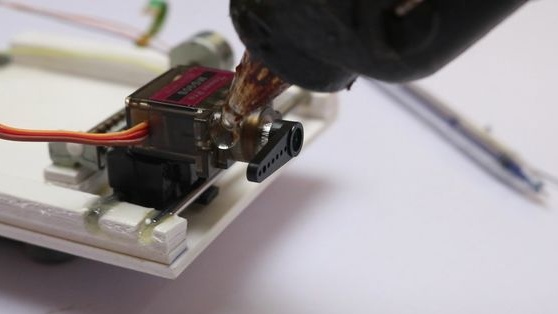
Limer håndtaget på servomotorens krop (stangens kugle støder mod overfladen). Fastgør den anden ende af tråden til servohåndtaget.
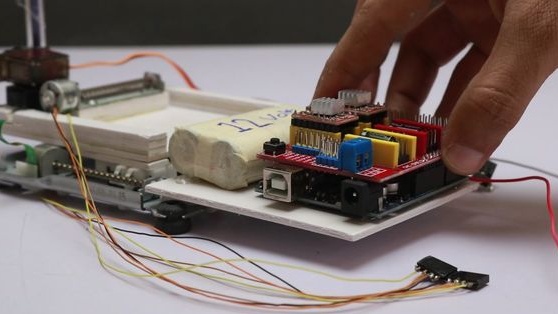
Trin fire: Modulmontering
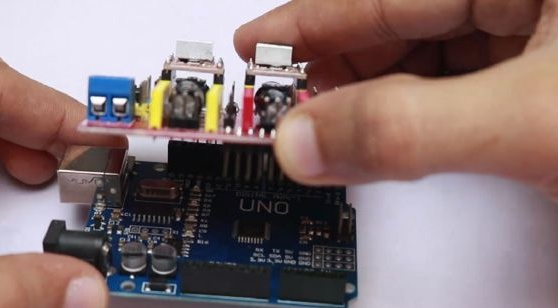
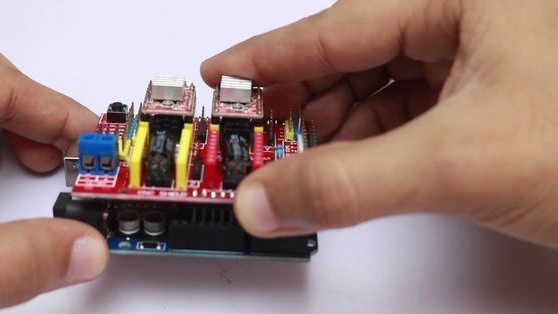
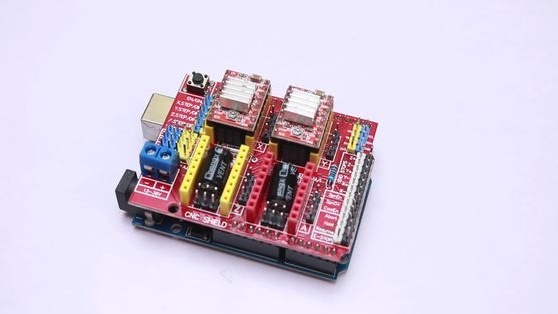
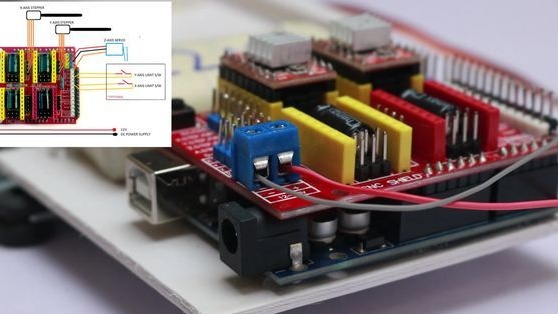
Installerer to stepmotormoduler med radiatorer på ekspansionspladen.
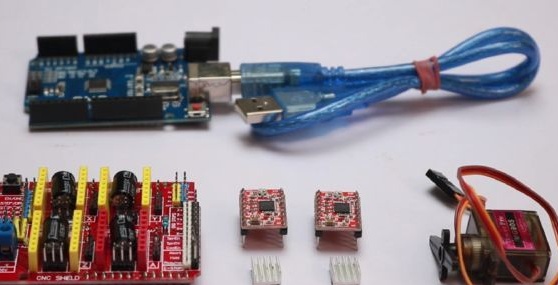
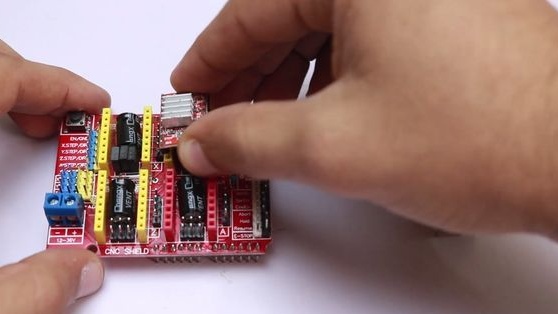
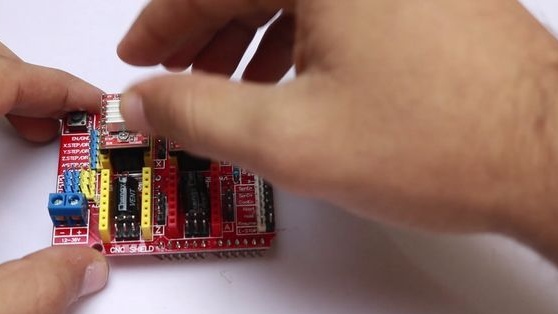
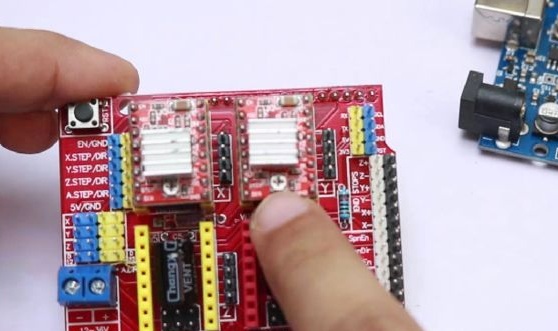
Installerer et udvidelseskort på Arduino.
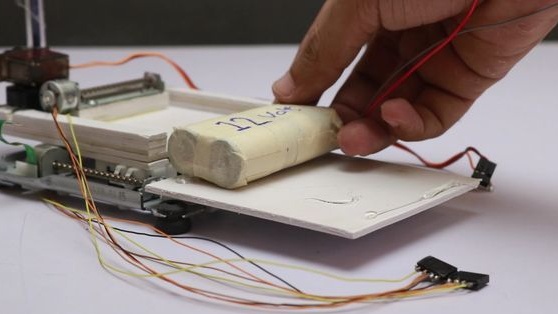
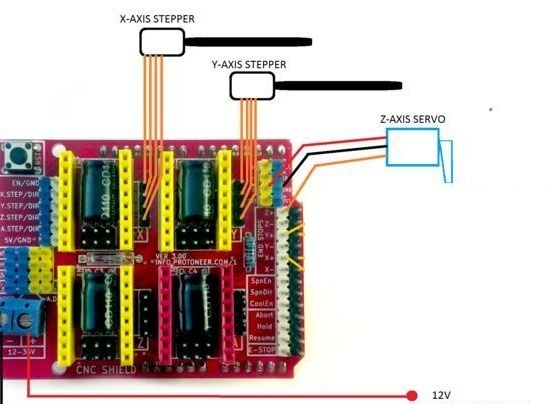
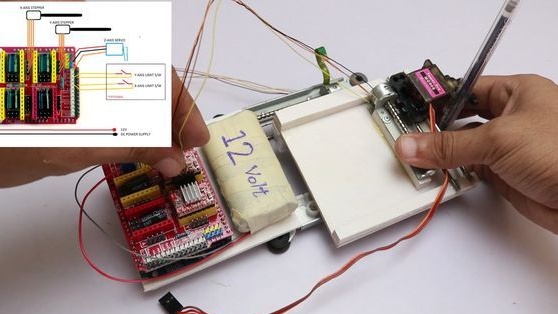
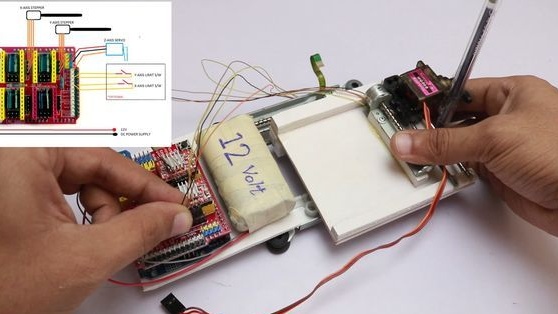
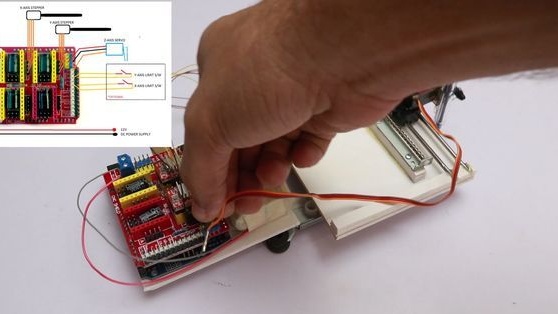
Trin fem: Opret forbindelse
Installer et batteri. Fastgør og forbinder alle elementer i henhold til de givne skemaer.
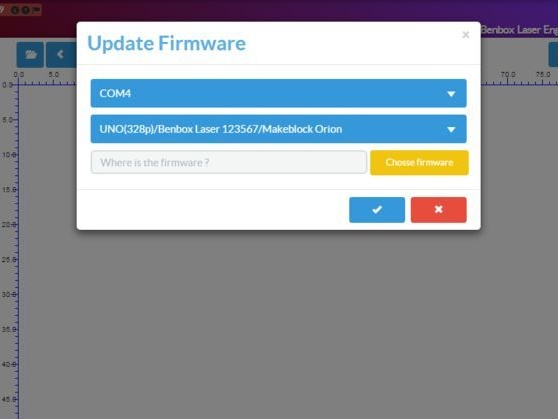
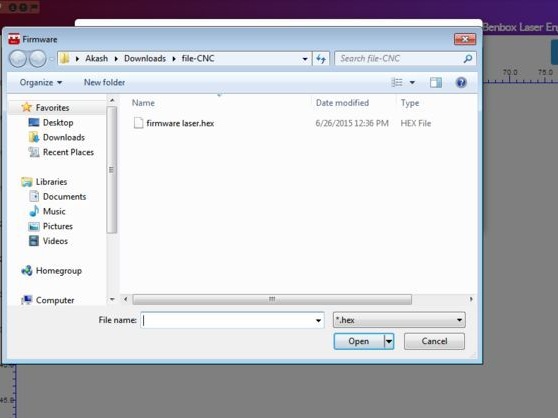
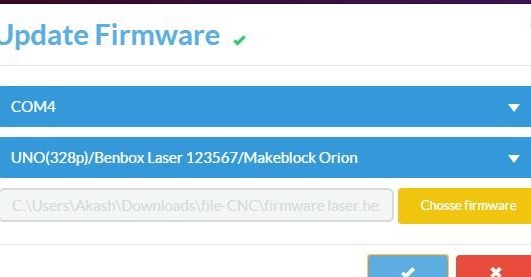
Trin seks: Software
Indlæser software. Åbner software. Tilslutter et Arduino USB-stik. Når du opdaterer firmwaren, skal du vælge COM (3.4 eller 5).
Indstiller parametrene.
Første side:
Seriel port: COM (3.4 eller 5)
Pen Up: 35
Pen Down: 22
Hastighed: 800 (du kan øge)
Tid: 200
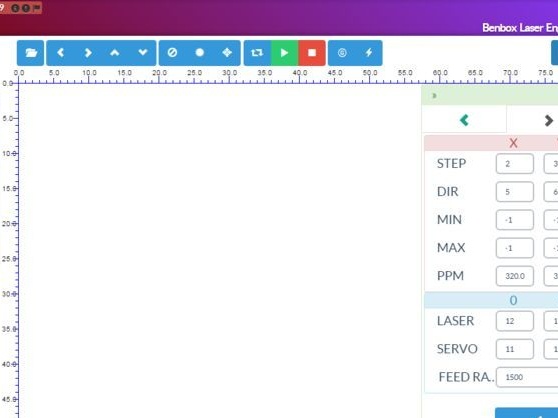
Anden side:
Trin: x = 2 y = 3
Dir: x = 5 y = 6
Min: x = -1 y = -1
Maks: x = -1 y = -1
Ppm: x = 320 y = 320
laser: 0 = 12 1 = 12
Servo: 0 = 11 0 = 12
Feed Ra. : 1500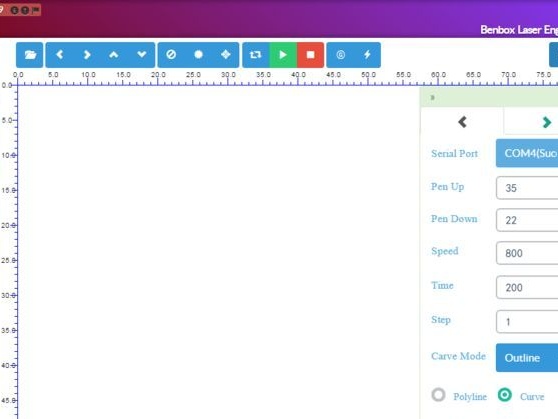
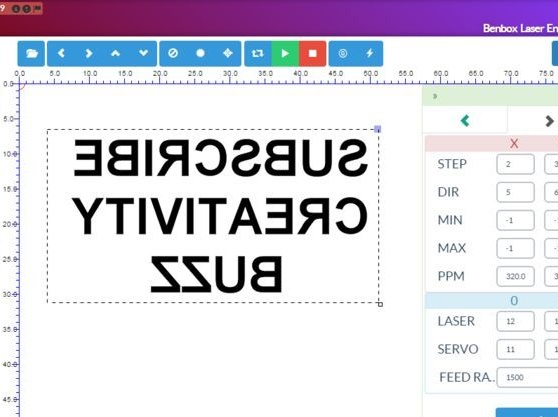
Robotartisten er klar. Det gjenstår at indtaste tekst i feltet og køre programmet.
Hele processen med at oprette en robotartist kan ses i videoen.