


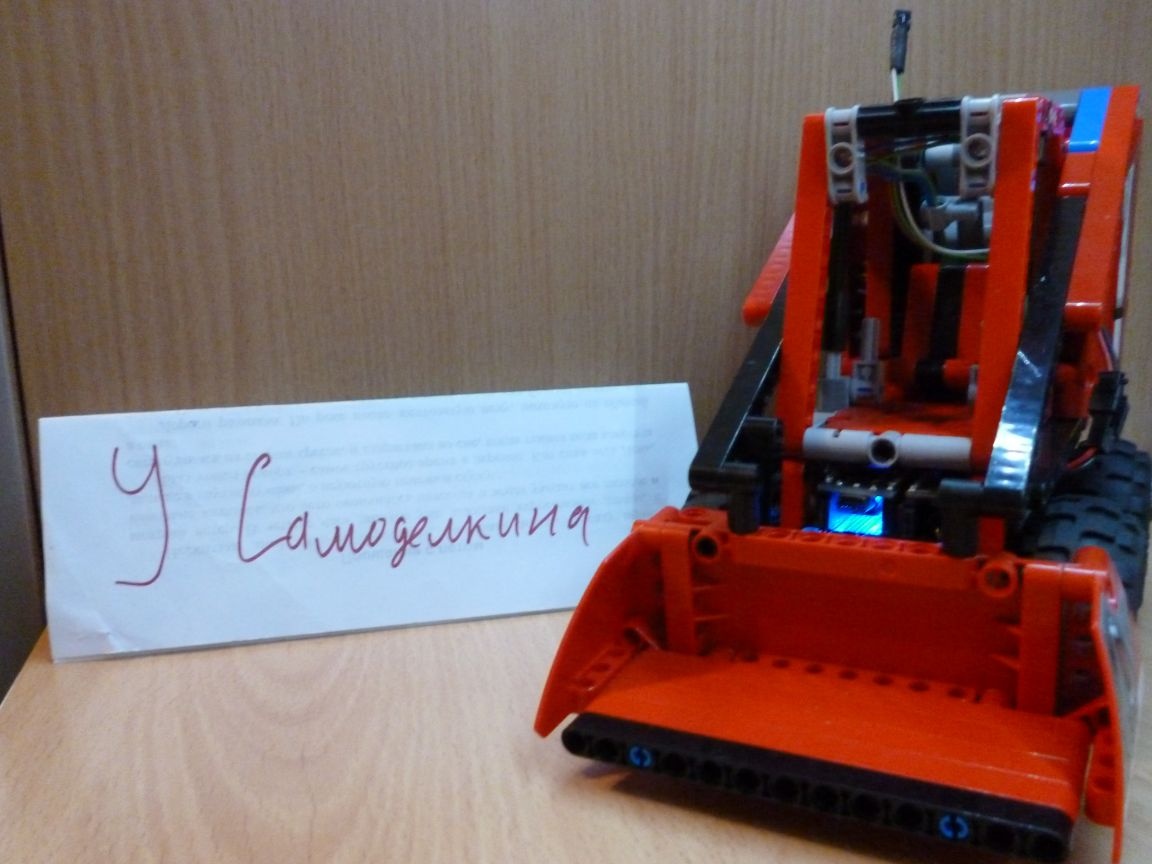
Så at tage legoteknik fra min søn og derhjemme Arduino Nano begyndte at kombinere disse designere.
Vi har brug for:
- Lego Technic (sæt 42029 og 42033)
- Arduino Nano (link til tavlen)
- DRV 8833
- 2 servodrev SG-90
- IR-modtager
- gearmotor
- 2 lysdioder
- 2 modstande 150 ohm
- Kondensator 10v 1000uF
- 2 enkeltrads kamme PLS-40
- 2 PBS-20-stik
- Induktor 68mkGn
- 4 NI-Mn 1,2v 1000mA batterier
- Forbindelse far-mor to pin til wire
- Homutik
- Ledninger i forskellige farver
- lodning
- Rosin
- loddejern
- Bolte 3x40 og møtrikker og skiver til dem
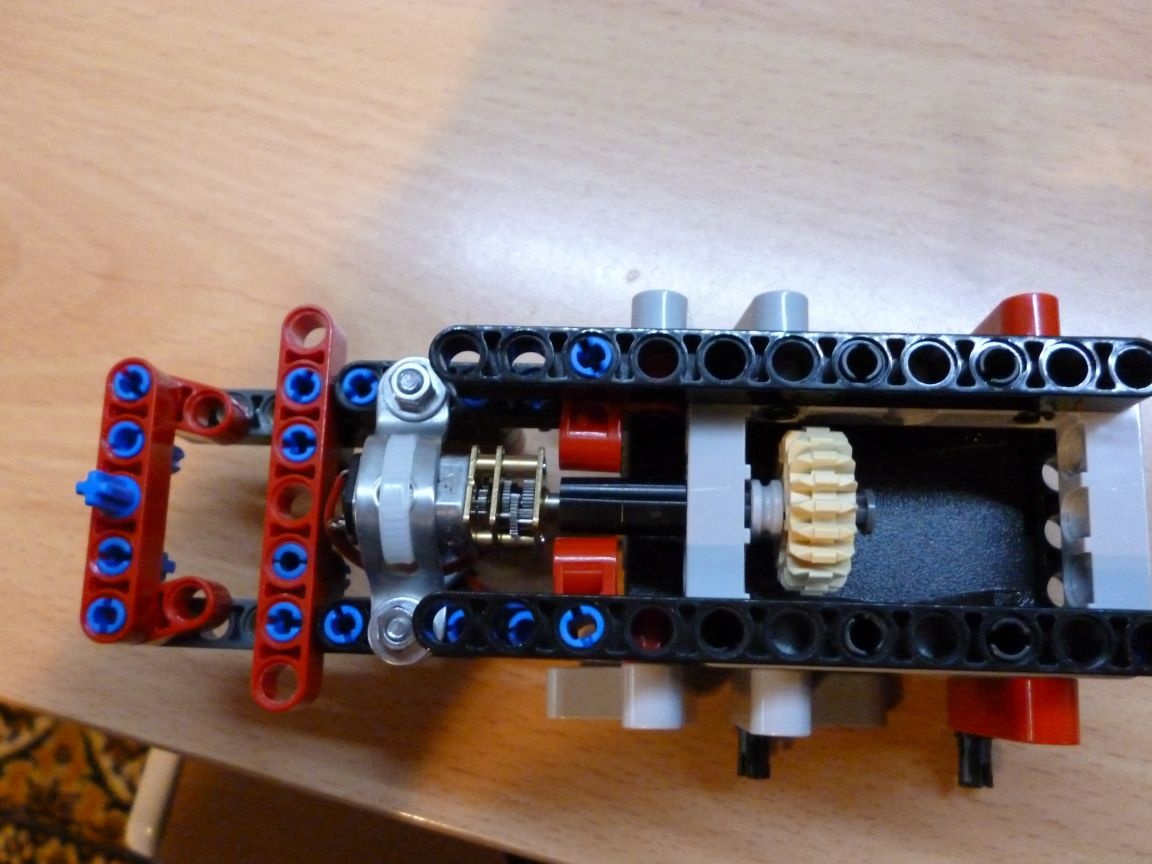
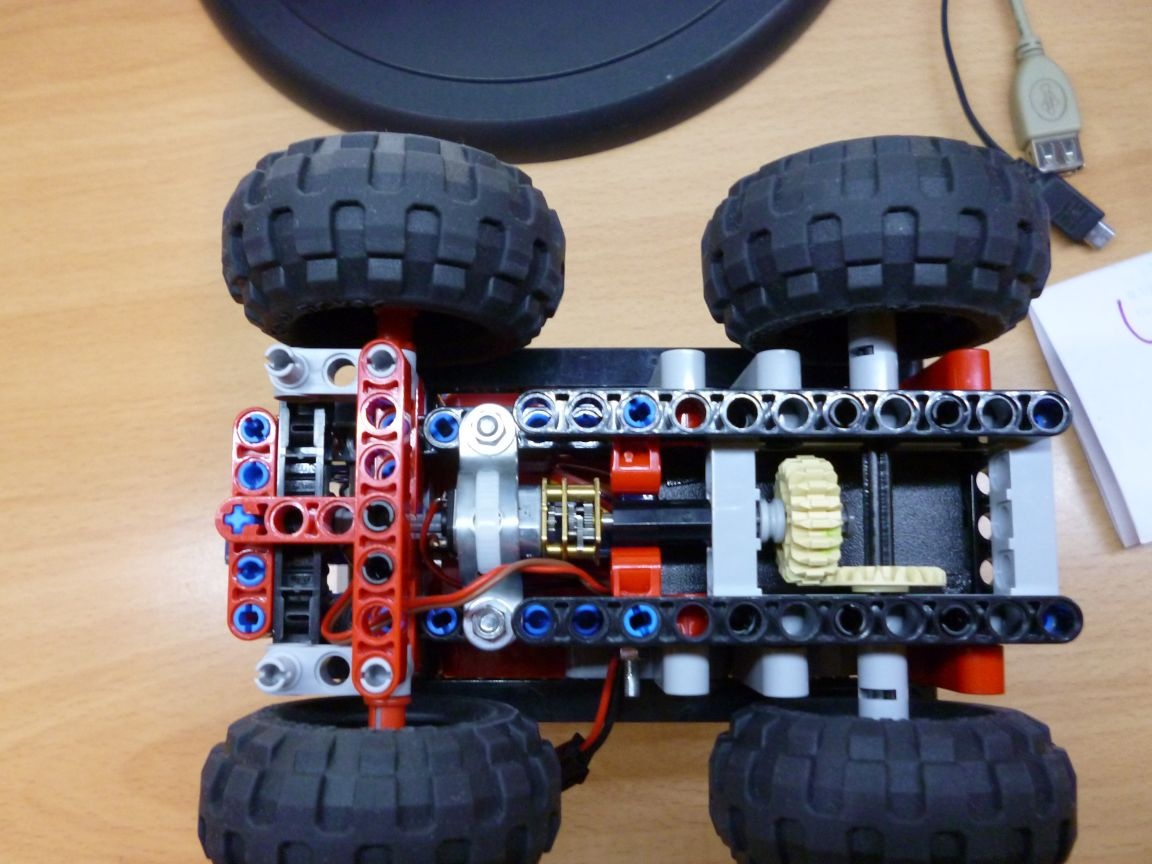
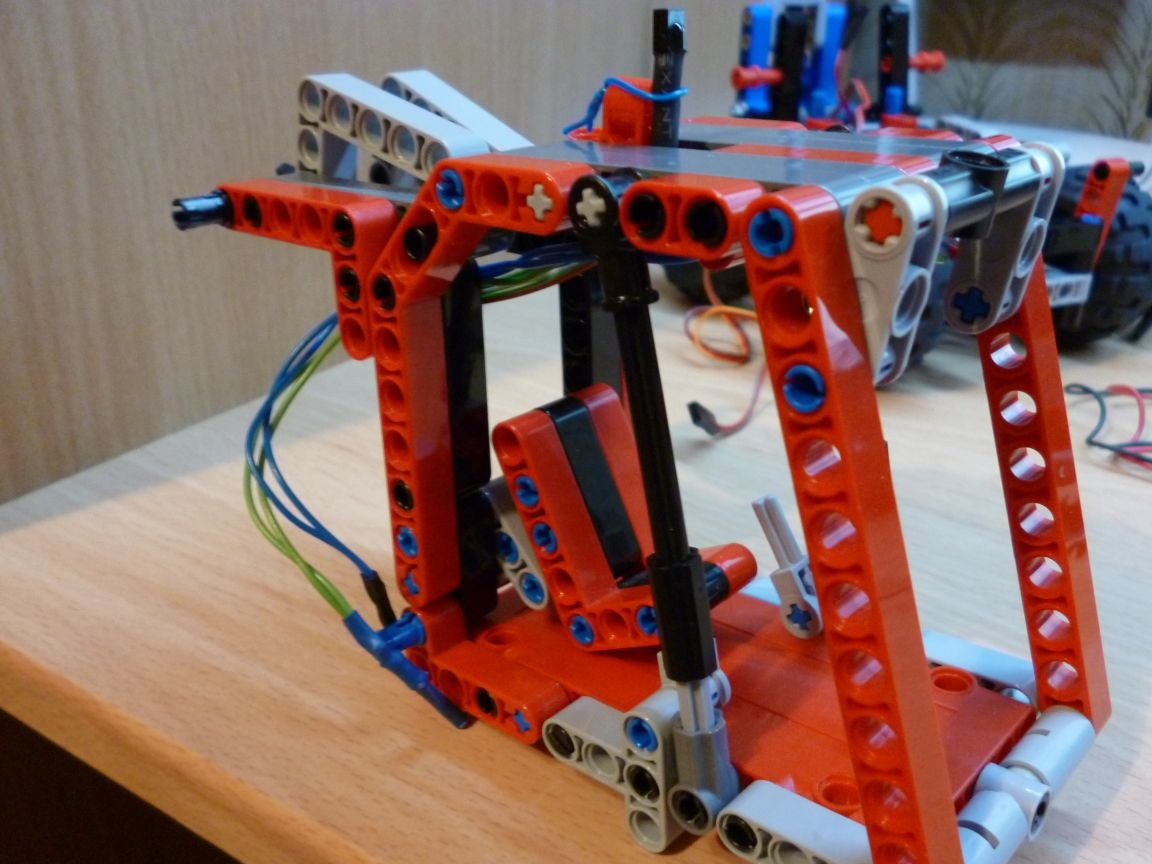
Trin 1 monter chassiset og drivakslen.
Du kan samle ethvert chassis fra Technic, det viste sig sådan.
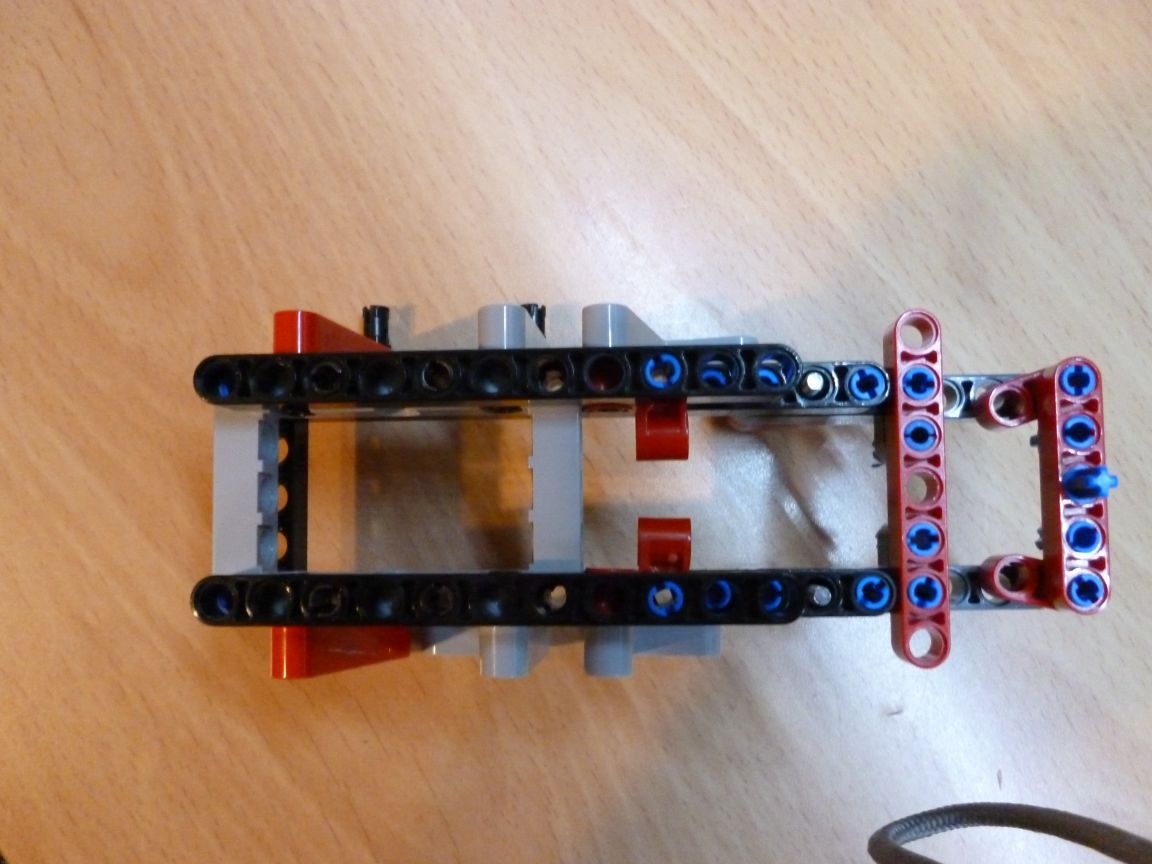
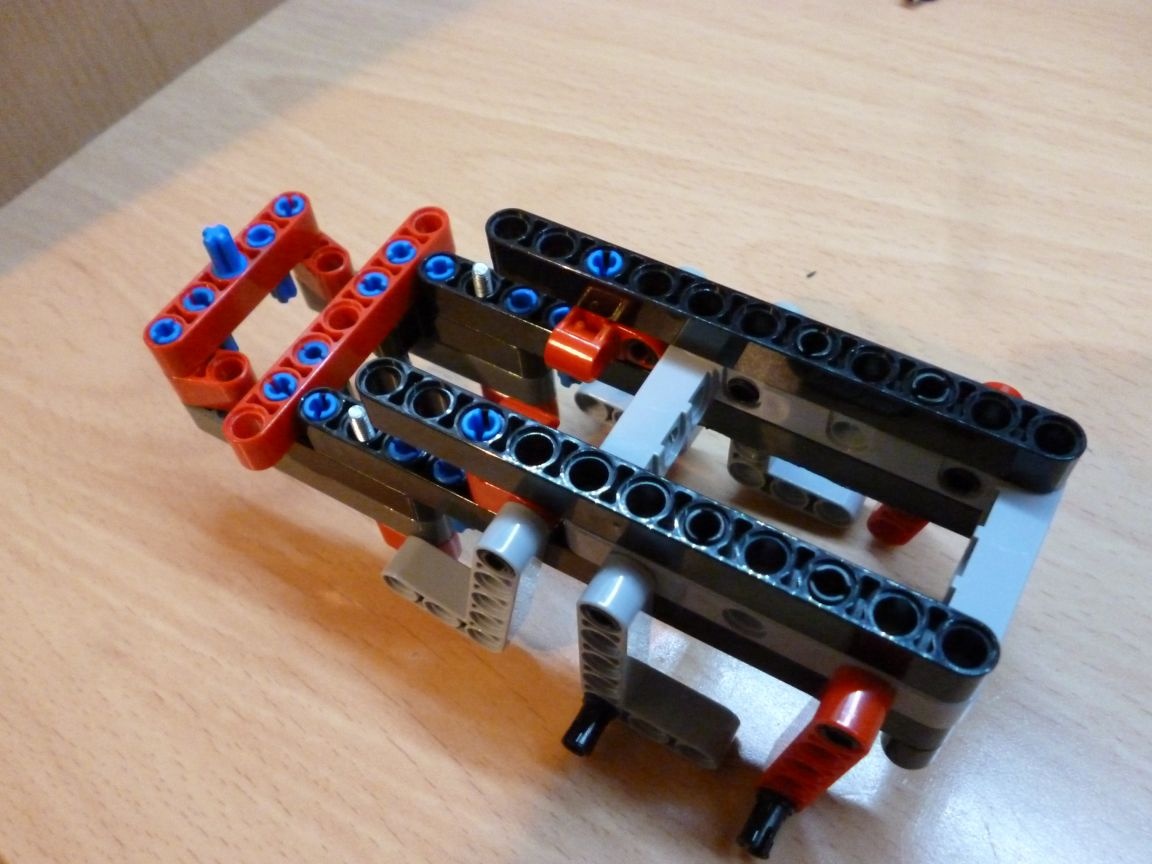
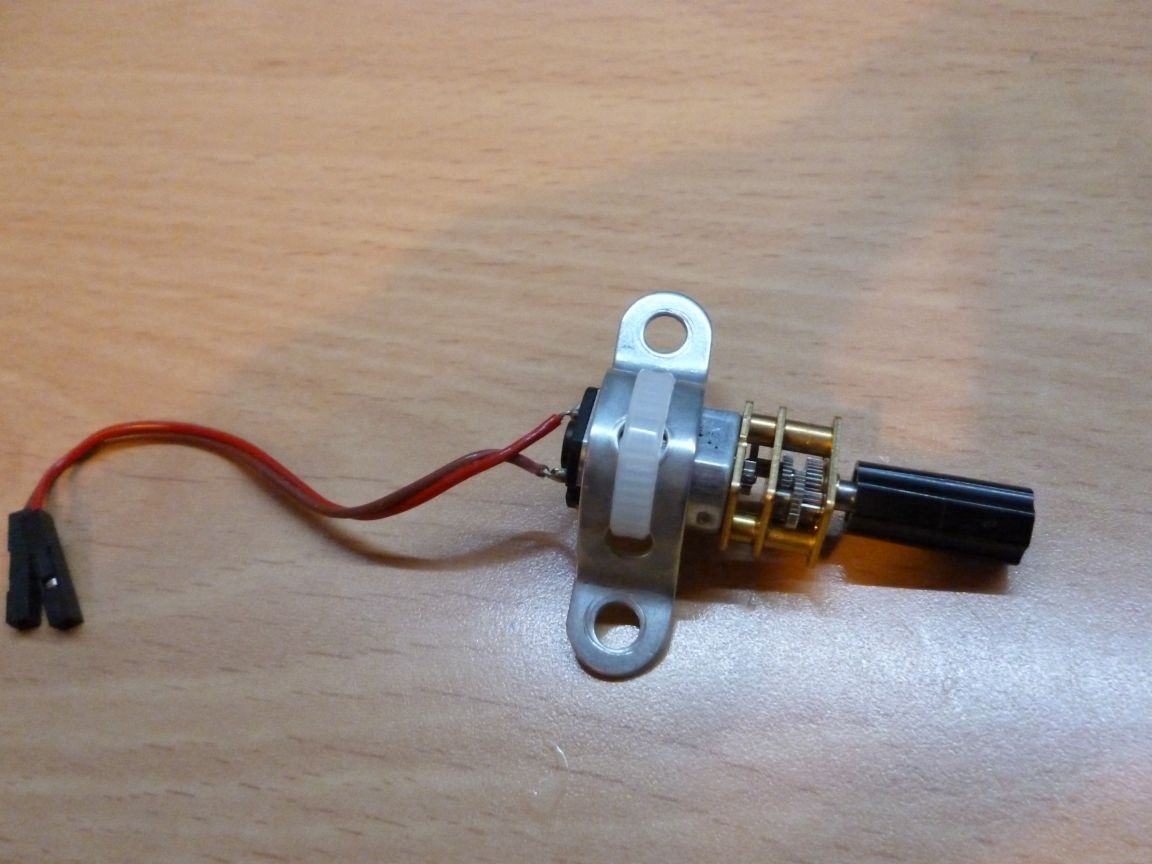
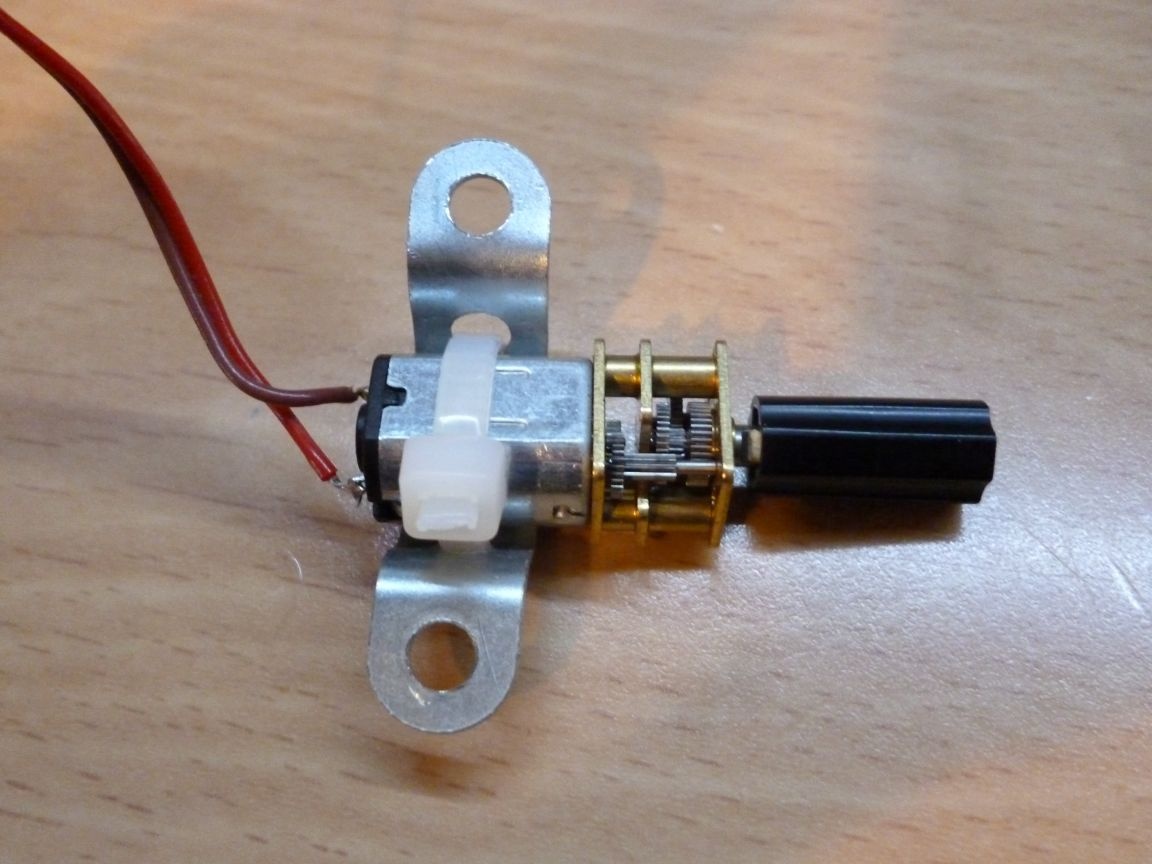
Der er kun problemet med at forbinde gearmotoren med designerne. Jeg besluttede dette på følgende måde: satte gearmotorens akse en forbindelsesmuffe og indsatte et skrot af en tændstik til fastgørelse. Til montering af gearmotoren bruges metalplast fra en jerndesigner og en klemme. Det viste sig følgende:
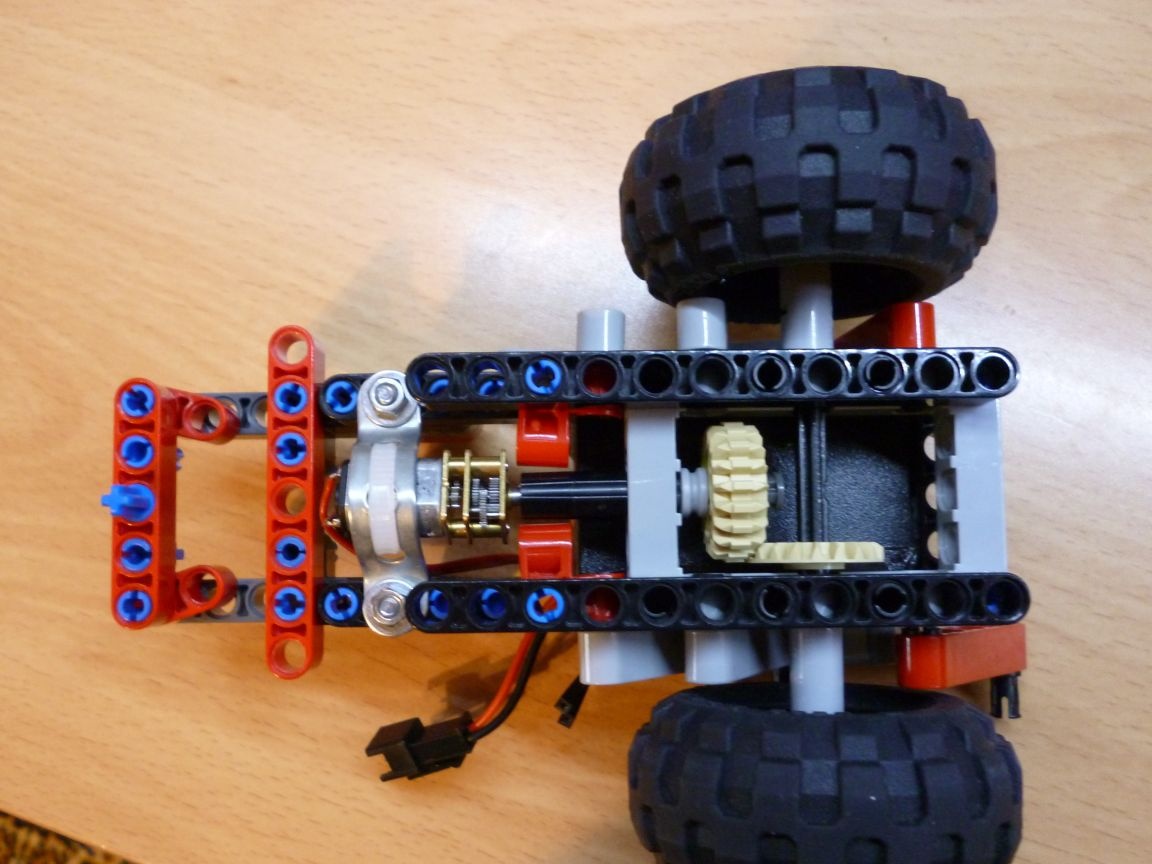
Dernæst installerer vi det resulterende design på chassiset ved hjælp af 3x40 bolte:
Og sæt hjulene på:
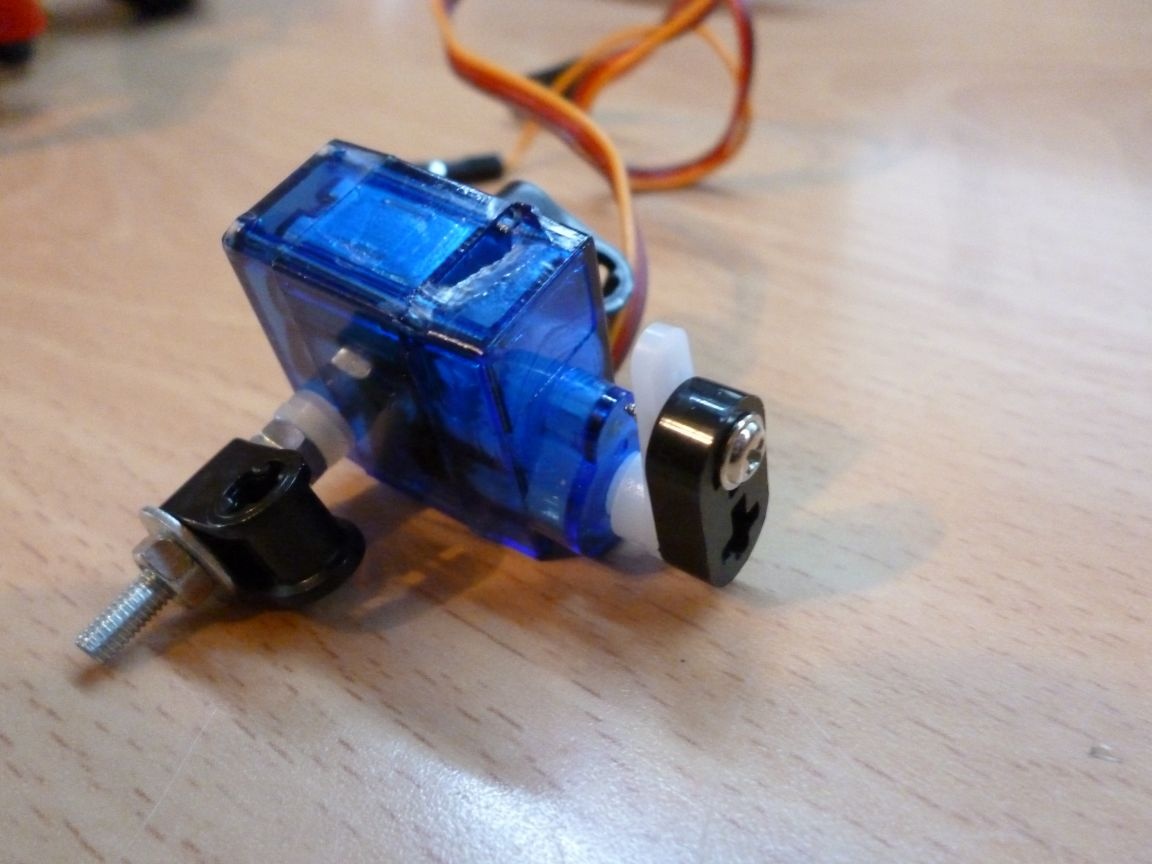
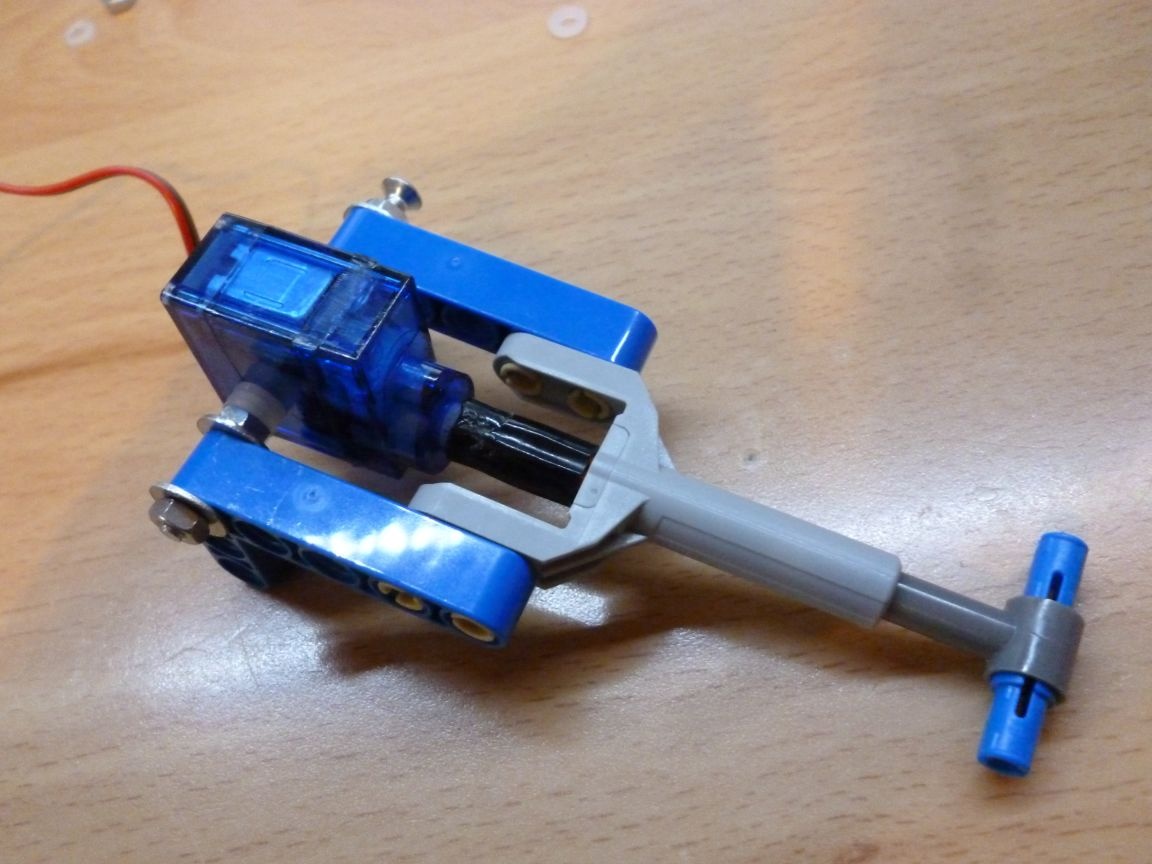
Trin 2 drejelige hjul
For at udføre rotationen tog servo SG-90. Det er nødvendigt omhyggeligt at bore for ikke at røre ved de indvendige dele, et gennemgående hul med en diameter på 3,2 mm eller bare skære med en brevpapirkniv.

Vi sætter bolten ind i det lavede hul og ved hjørnerne og fastgør med møtrikker:

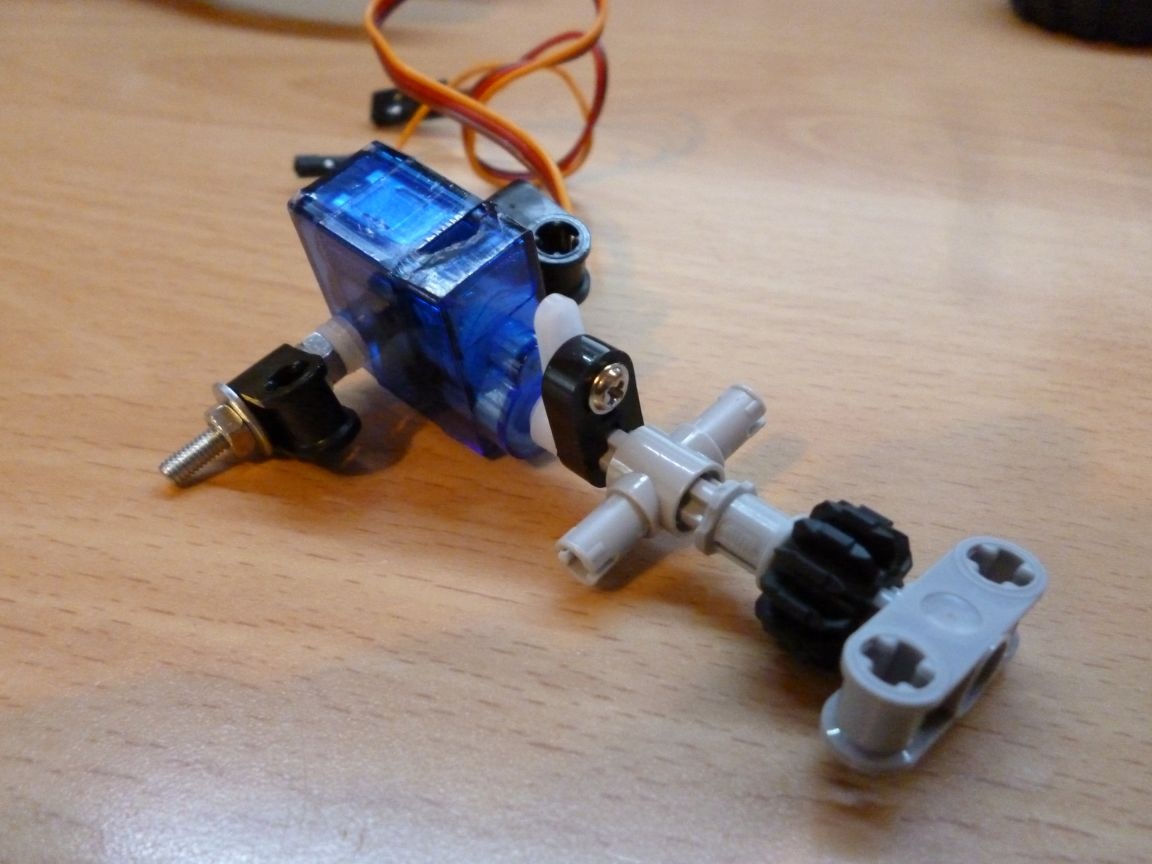
På servo akslen satte vi på en håndtag med en skruet del fra lego:
Og til sidst drejeenheden:
Vi sætter på chassiset:

Sæt på hjulene:
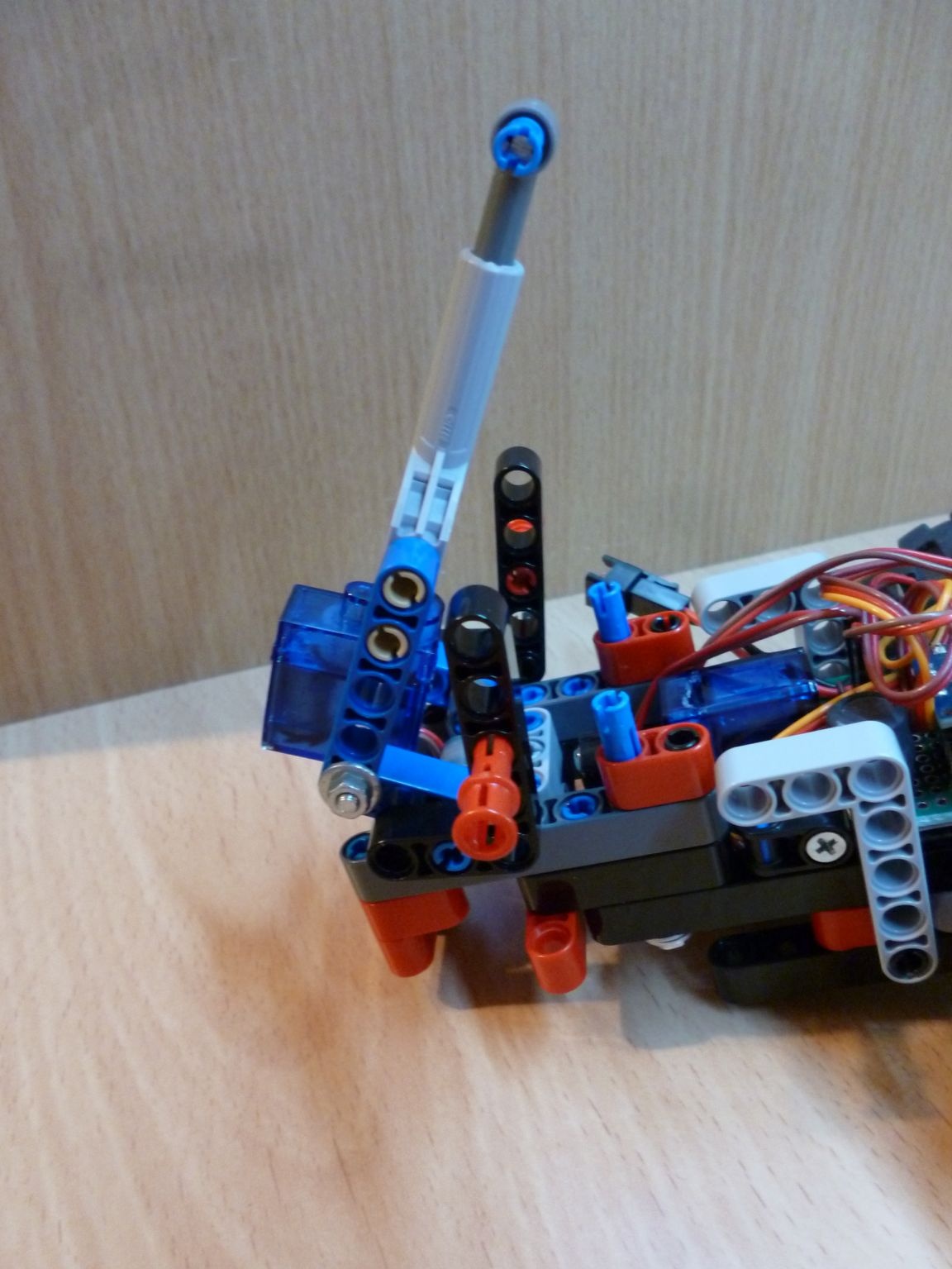
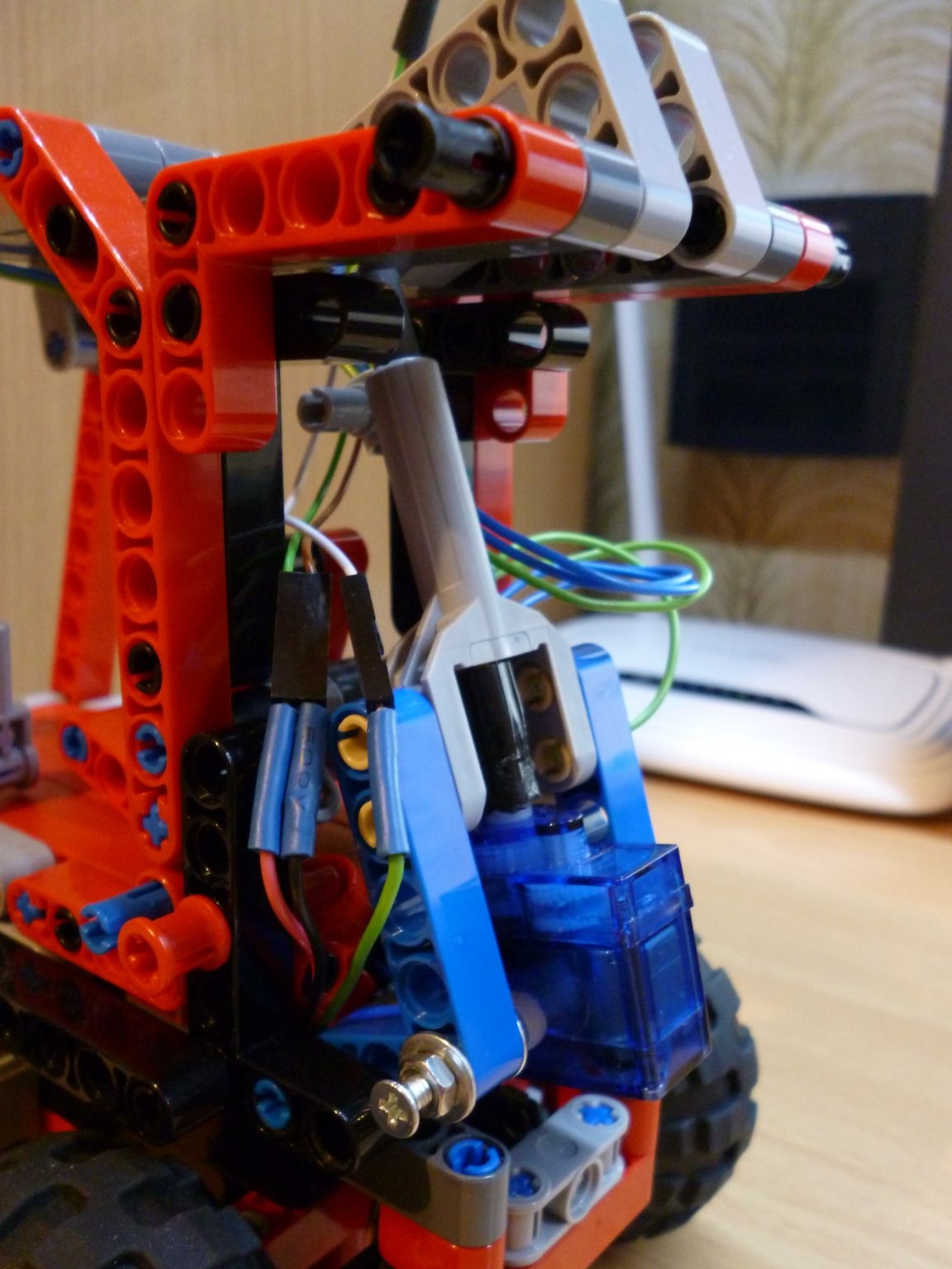
Trin 3 løfteudstyr.
For at løfte skovlen tog en modificeret servo SG-90. Hele punktet med dets ændring er at fjerne den interne kontrolenhed og lodde ledningerne direkte til motoren for at få en gearmotor ud af servodrevet, det vil sige, så den kan rotere helt. Såvel som i den første servo skal du lave et gennemgående hul til montering:
Installer på chassiset:
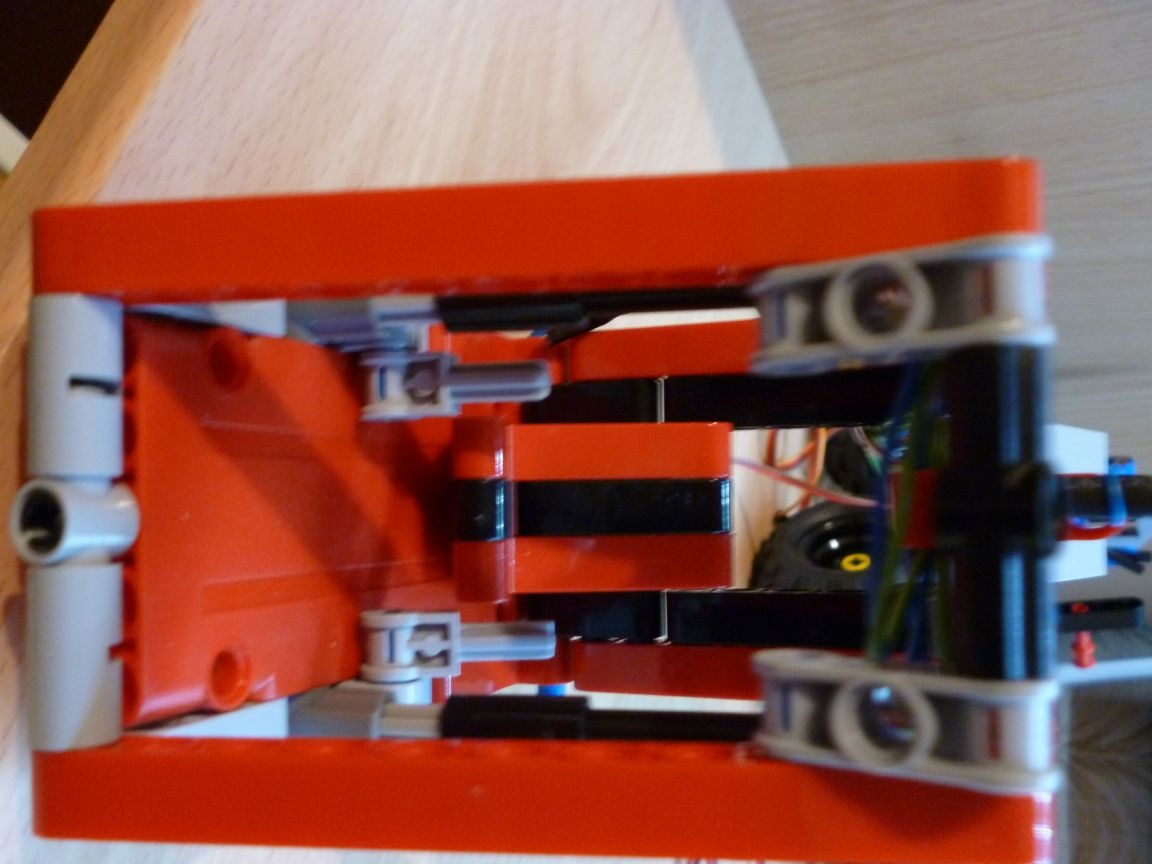
Trin 4 førerhus.
Det er nødvendigt at samle et førerhus fra legoteknik fra fotografier:

Trin 5 er en elektriker.
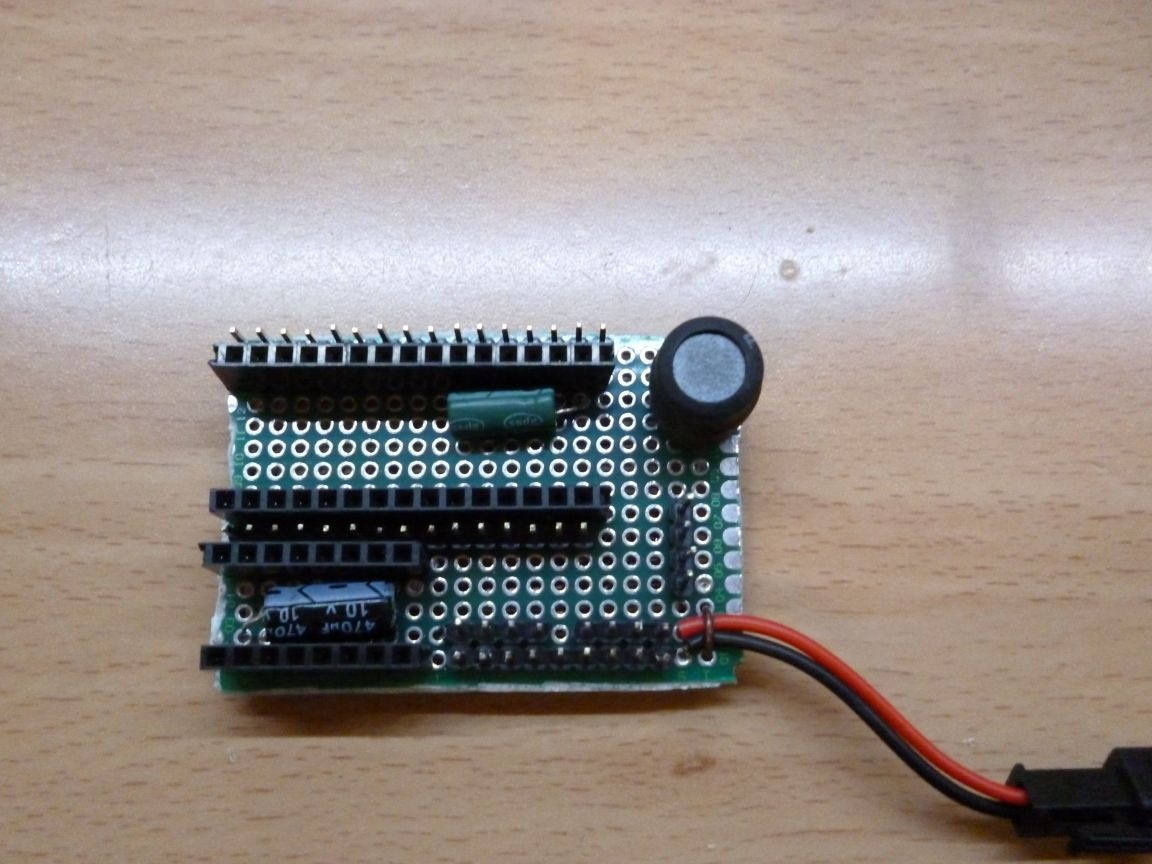
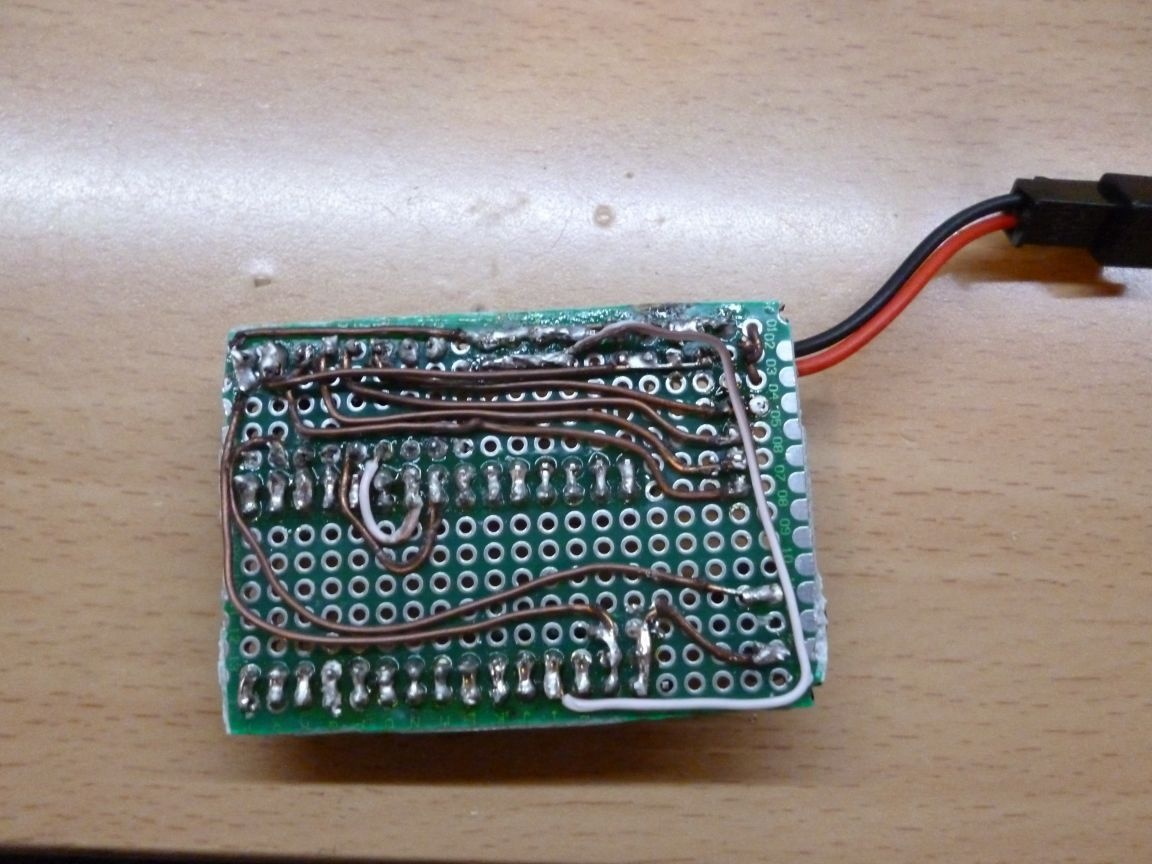
Her skal du tage på et loddejern. For nemheds skyld skal du lodde alt på kredsløbskortet i henhold til følgende diagram:
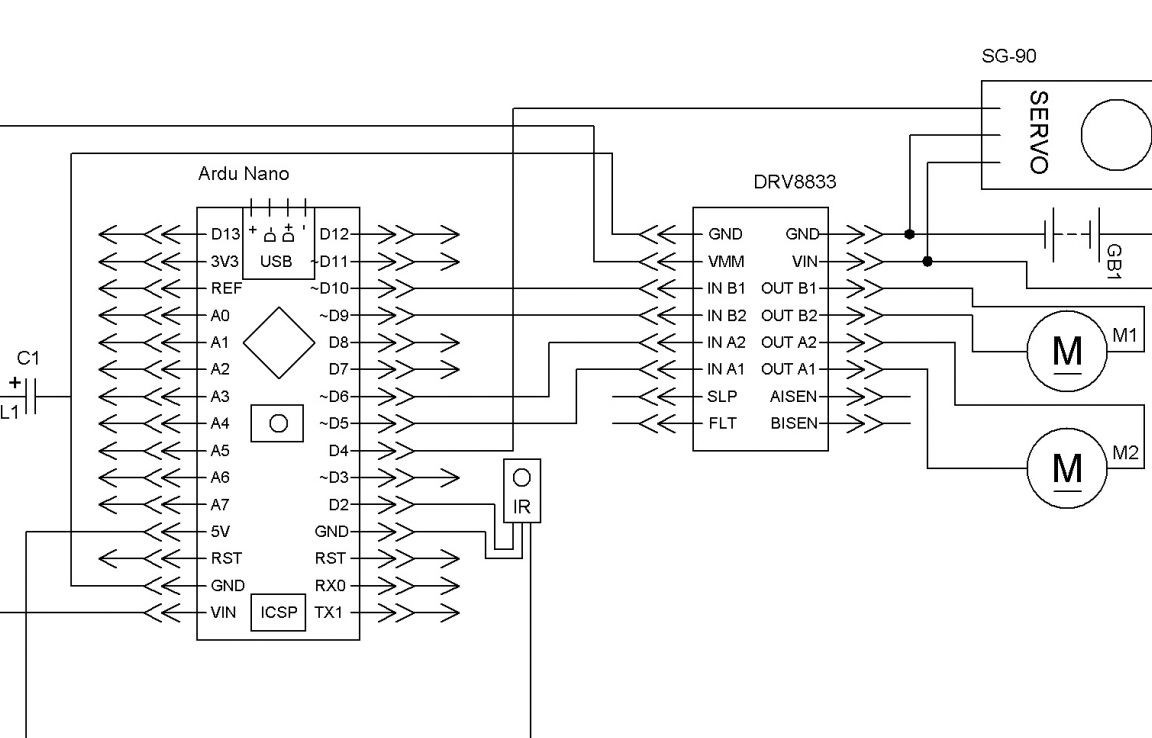
Jeg synes, det er værd at forklare lidt: du kan tage en hvilken som helst laveffektkondensator, du kan også finde en induktor af enhver art, dette er nødvendigt for at stabilisere spændingen på mikrokontrolleren. Modstande skal vælges for de anvendte LED'er. Jeg tog en IR-modtager fra et gammelt legetøj, men du kan købe den i en radiobutik. Hvis der er stærk interferens, skal du tilføje en kondensator til IR-modtagerens strømkreds.
Jeg fik dette:
Vi installerer Arduino Nano og DRV 8833 på deres steder:
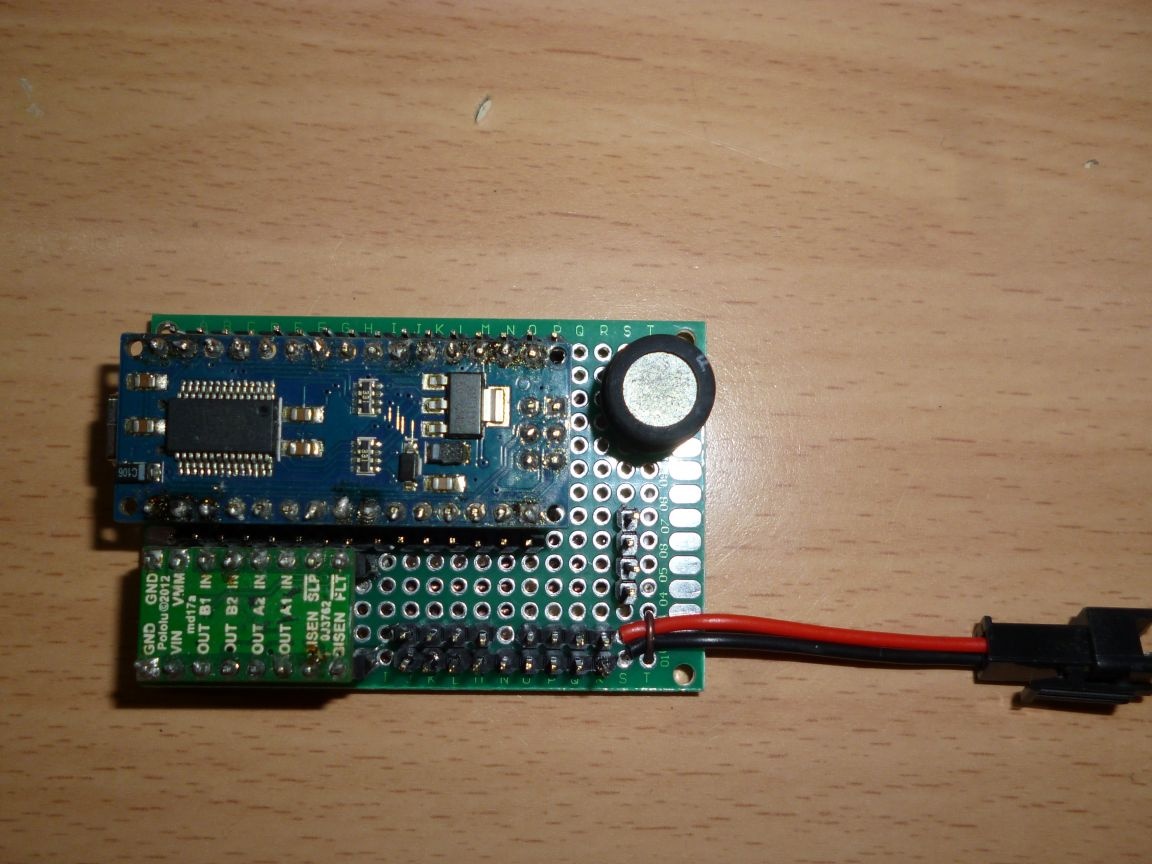
Og nu sætter vi brættet på chassiset (fjernet hjulene for nemheds skyld):
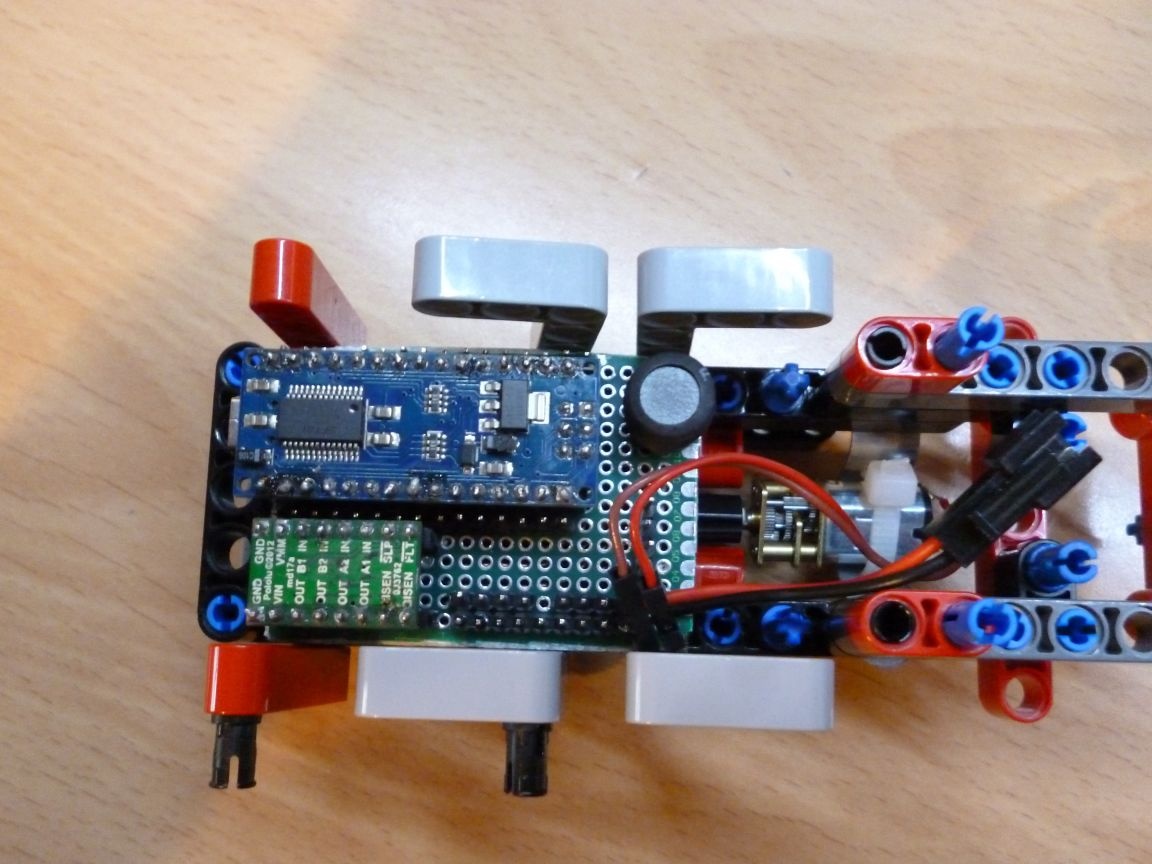
Til strøm brugte jeg 4 Ni-Mn 1.2v 1000mA batterier, der er forbundet i serie og viklet med elektrisk bånd. Jeg limede dem på dobbeltsidet bånd under bagklappen.
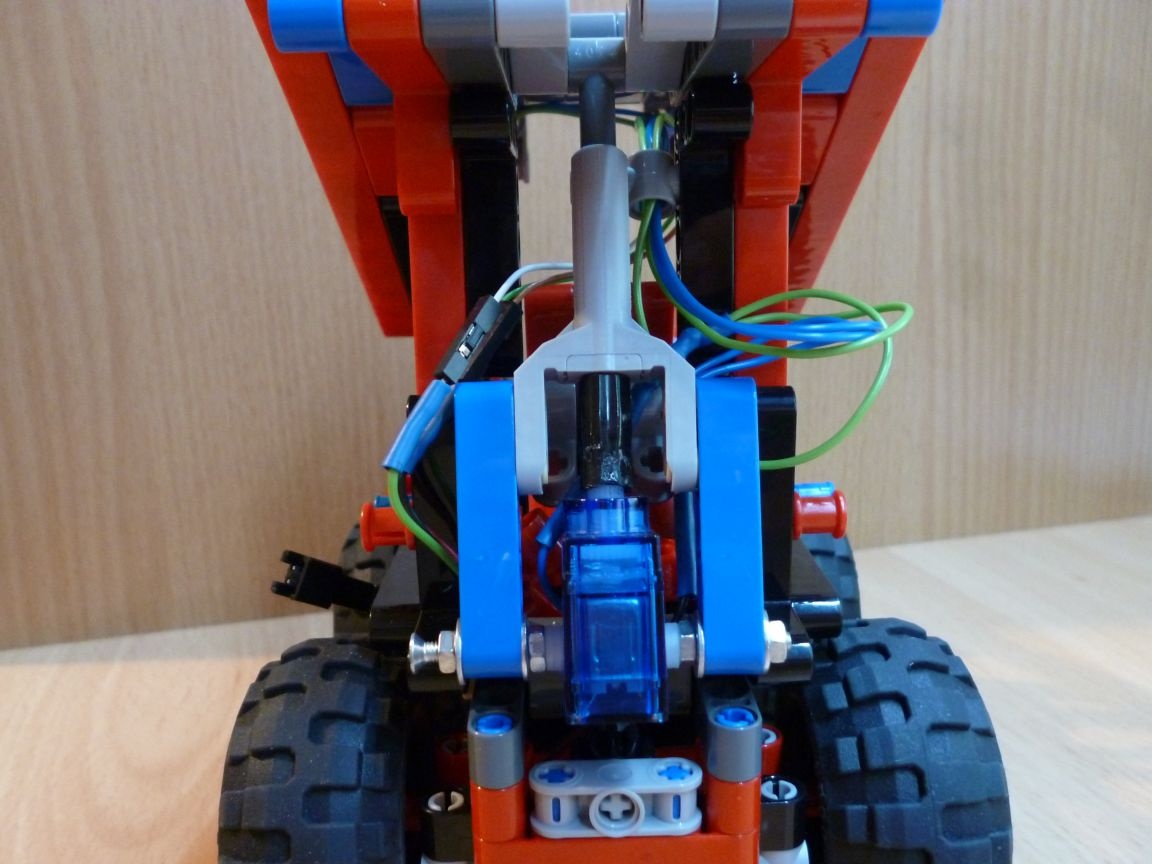
Trin 6 installation af førerhuset.
Vi tilslutter IR-modtageren, motorerne og dioderne i henhold til diagrammet, sætter førerhuset på toppen af chassiset, fastgør skovlen (enhver spand kan laves):

Trin 7 firmware.
Jeg programmerer i en Arduino IDE. Først skal du udfylde min firmware og gennem terminalen se på de fjernbetjeningskoder, du vil bruge. Du kan tage en hvilken som helst IR-fjernbetjening, for eksempel fra et TV- eller DVD-afspiller. Ved at klikke på en knap i terminalen vil vi se koden for den trykte knap, skrive den ned på et stykke papir. Vi gør dette med alle knapperne, som vi vil programmere loaderens handlinger på. Rediger derefter skitsen. Vi skriver de koder, vi har optaget for de nødvendige handlinger, ned i den og blinker igen.
insertion
Loader video: