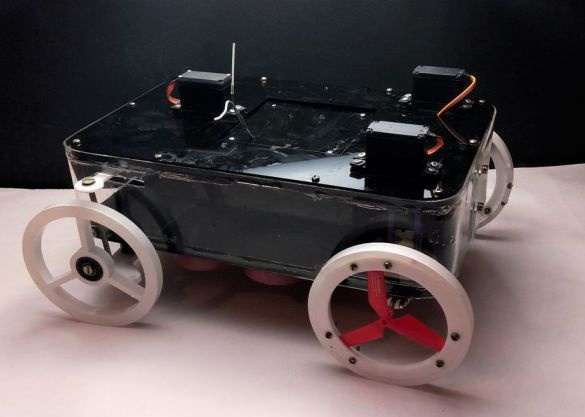



I denne artikel vil vi overveje, at indiske håndværkere fremstiller et terrænkøretøj, der bevæger sig både på land og på vand. Alt terrænkøretøj består af en flydende platform med hjul og en propell. Mekanismer styres af fjernbetjening via Arduino UNO.
Værktøjer og materialer:
-
-AKB 9V;
-Vyklyuchatel;
-Akril;
-Fanera;
(som reference er lejet 8 x 16 x 5 mm, forfatteren angiver 8 * 22 mm)
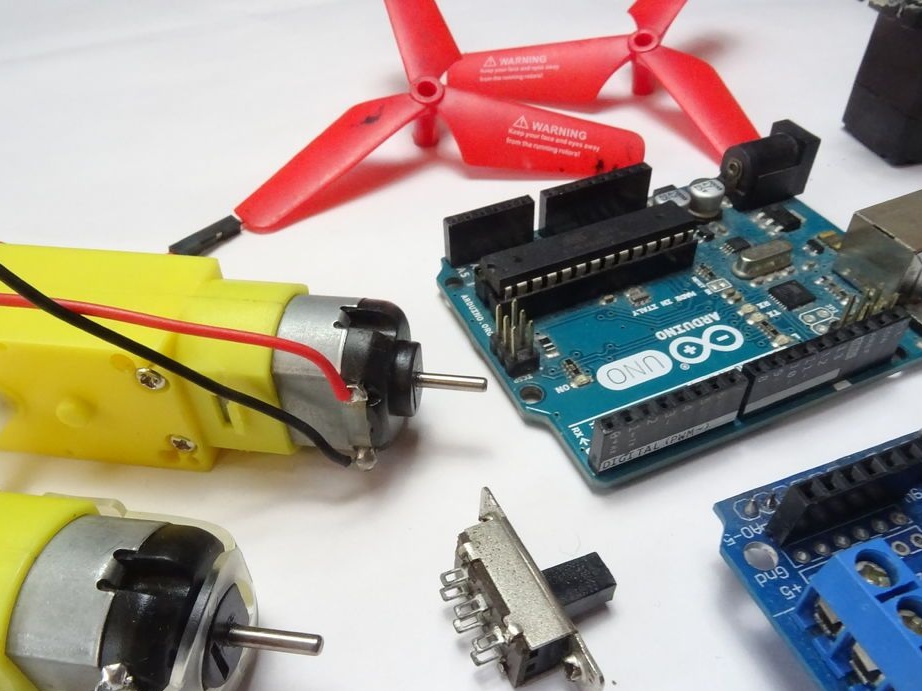
-To propeller;
-Krepezh;
-Poplavki;
-Limpistol;
-Super lim;
Epoxyharpiks;
Loddejern;
-Drel;
-Laseskærer;
-Pila;
- skruetrækker;
-Drel;
Loddejern;
A-boards;
-Computer med software;


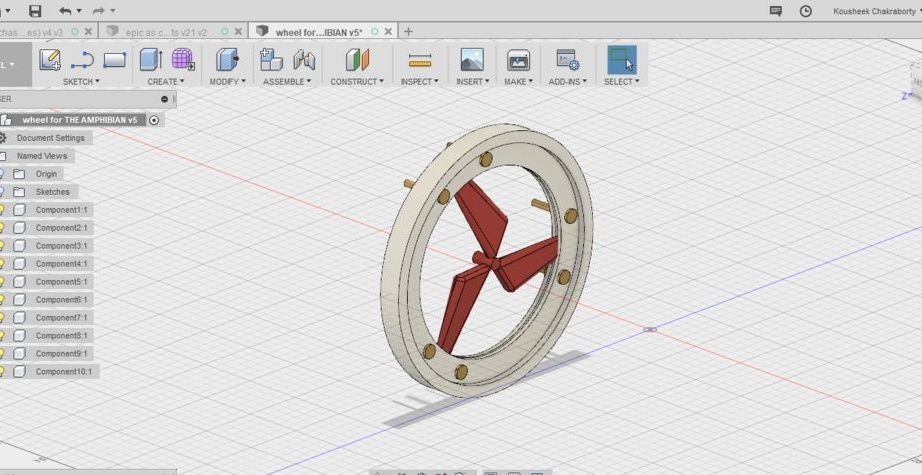
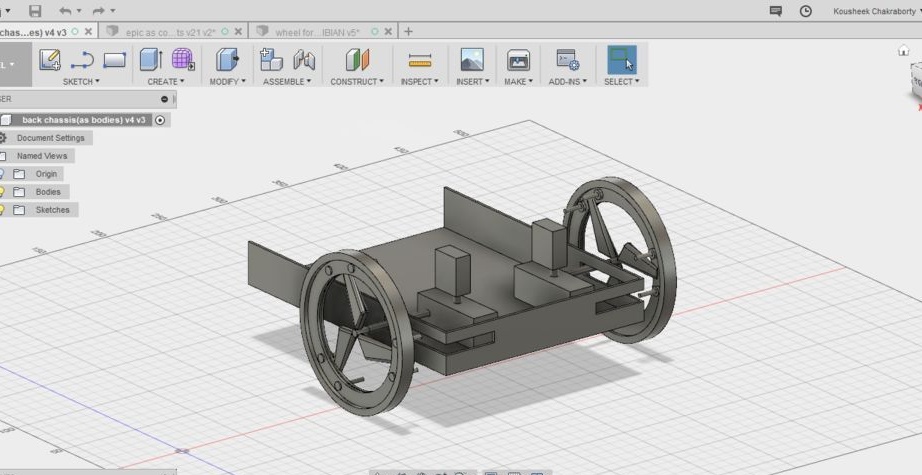
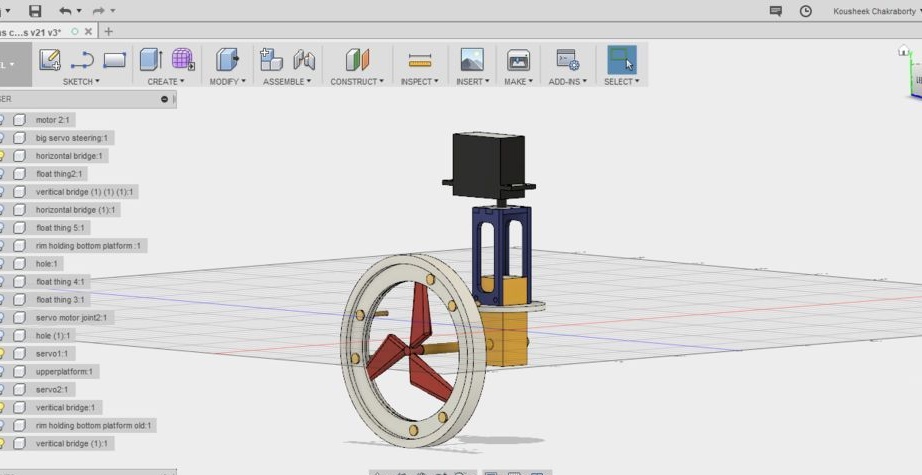
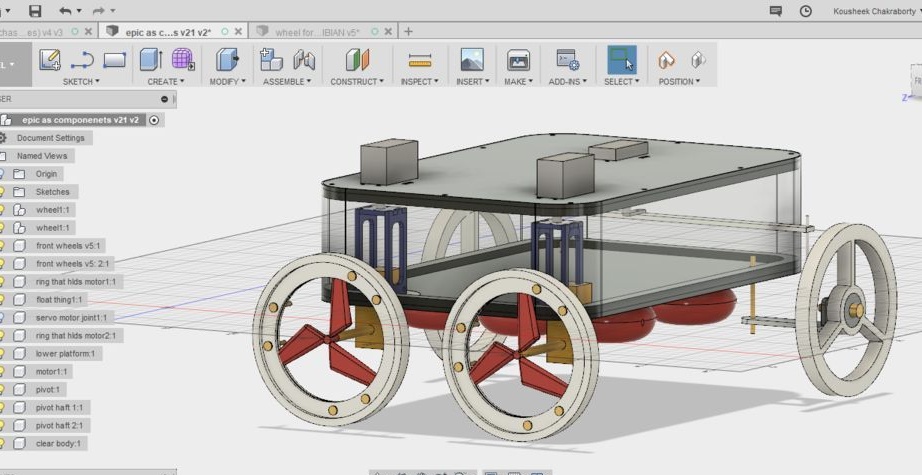
Trin 1: Design
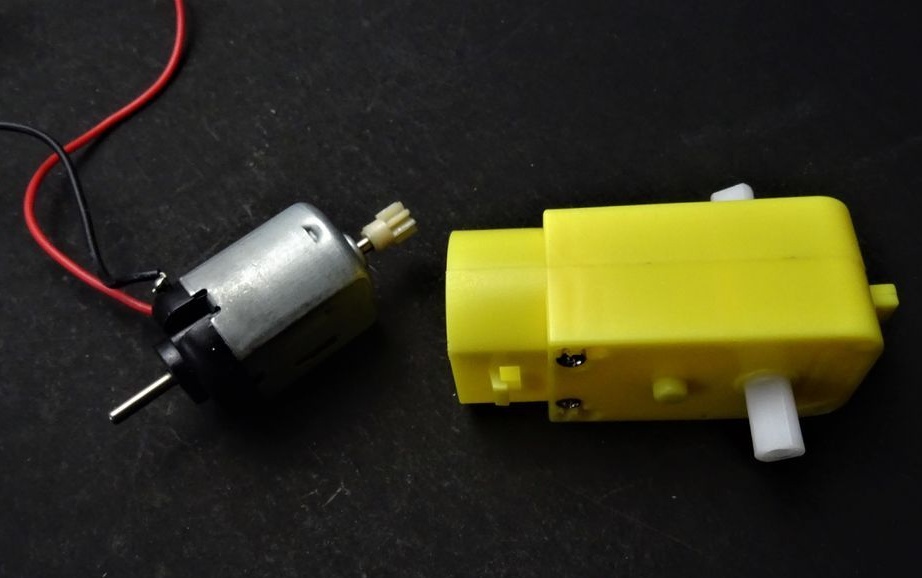
For at oprette projektet brugte mestrene Fusion 360-programmet. Hele vanskeligheden var at kombinere bevægelse på land og i vand. Ved design af hjulene udviklede mestrene et system, hvor skruerne ville åbne i vandet, men i betragtning af kompleksiteten i designet integrerede de simpelthen propellerne fra børnenes legetøj inde i hjulet. Dette giver hjulene mulighed for at bevæge terrænkøretøjet på land, og når de kommer ind i vandet, tændes skruerne.
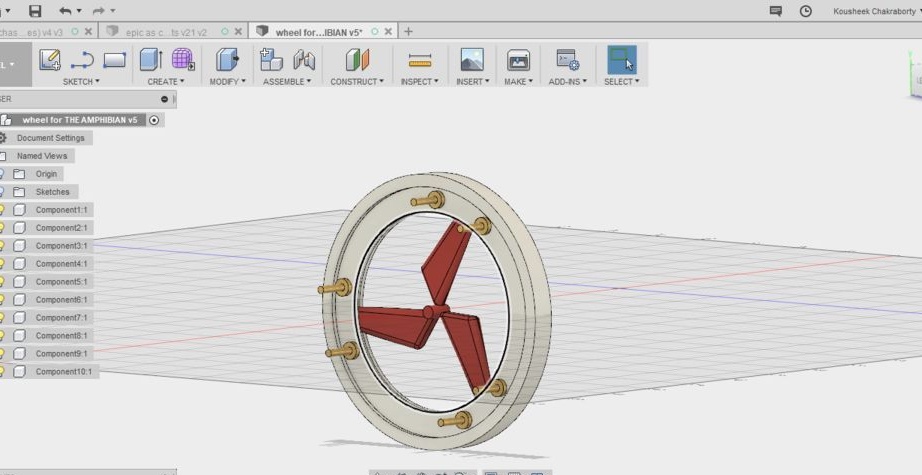
For at implementere denne idé skal du være i stand til at dreje baghjulene vinkelret på terrænkøretøjet, når du kører på vand. Dette blev muligt, når motorhjul blev taget ud af rammen. Plastiske gearkasser og vand, der kommer ind i dem, skader ikke.
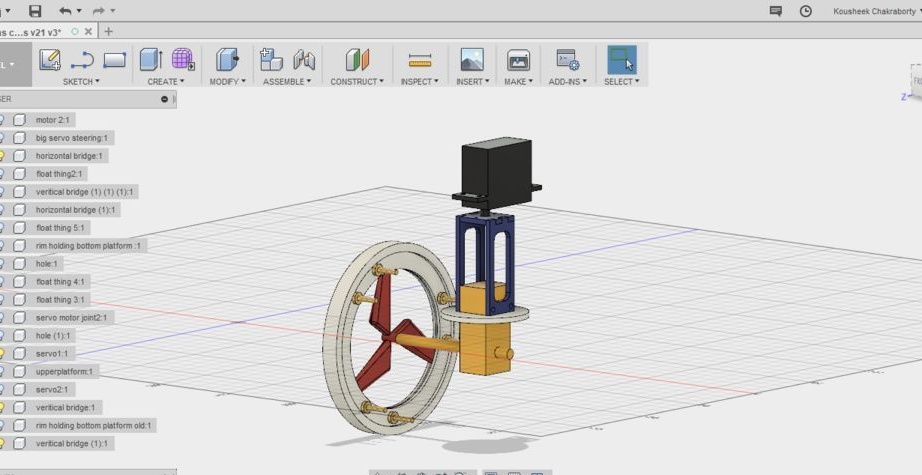
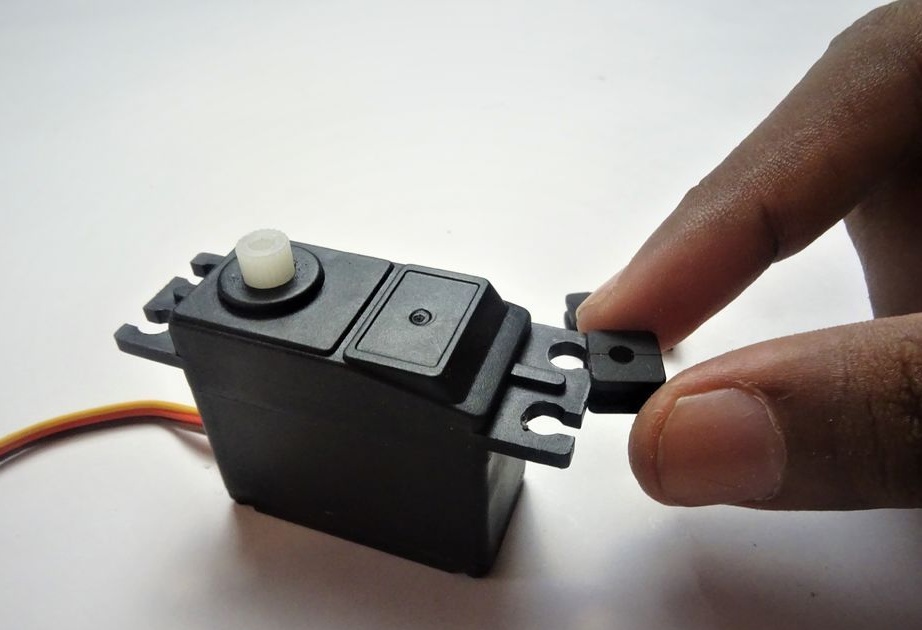
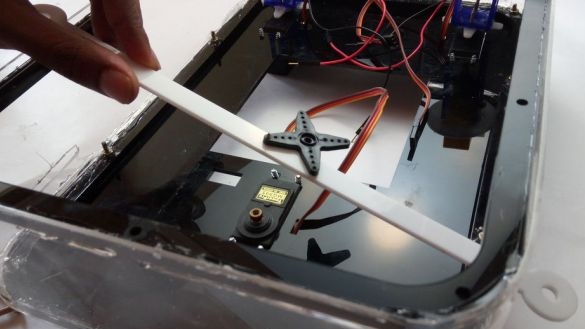
Drejningen af hjulskruerne udføres ved hjælp af et servo-drev.
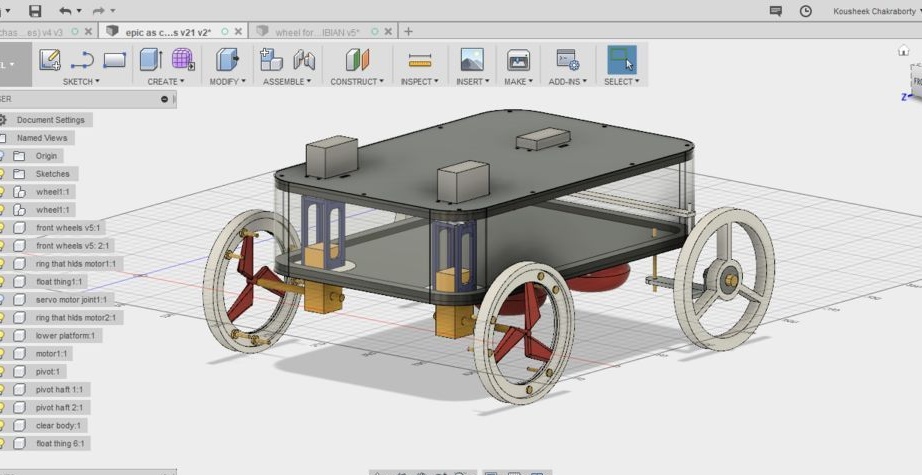
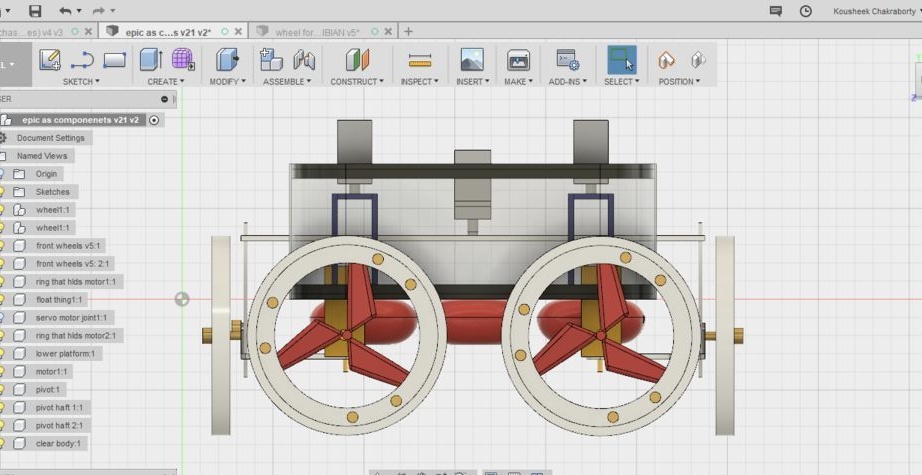
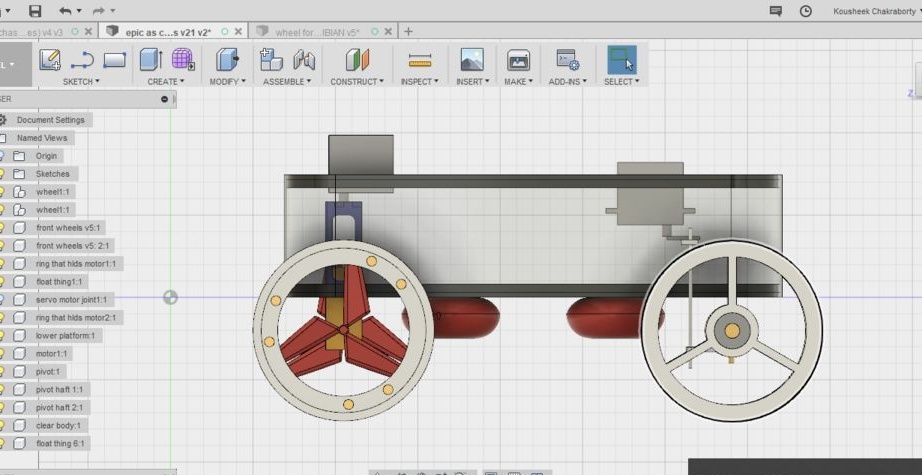
Terrænkøretøjet har to drejningsmekanismer. Den ene til at kontrollere baghjulene på propellerne i vandet, og den anden til at køre på land styrer forhjulene. Forhjulets rotationsvinkel er 35 grader, hvilket giver mulighed for skarpe sving.
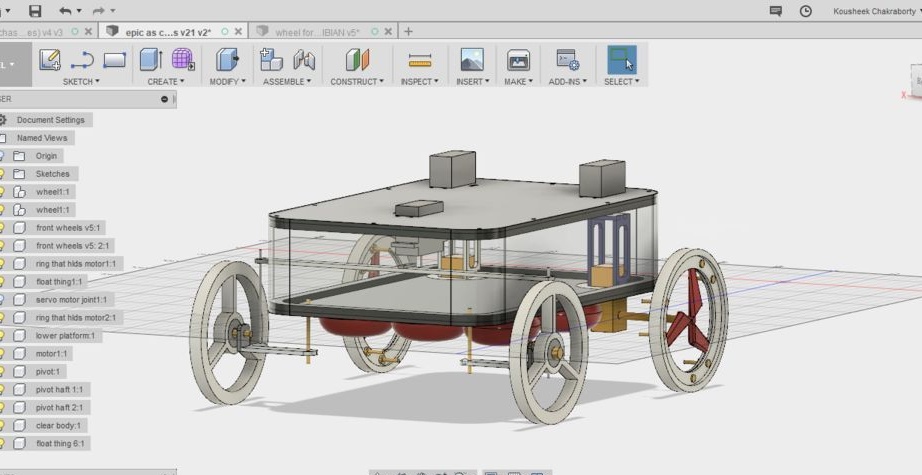
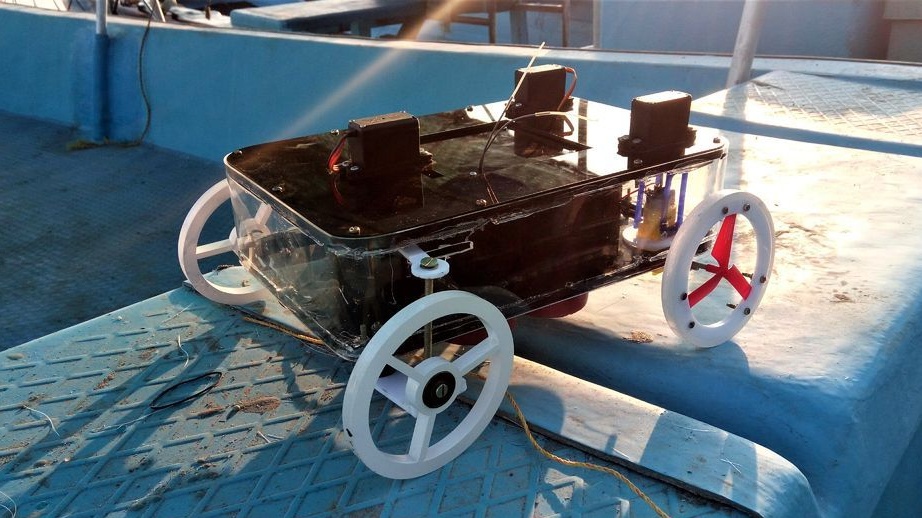
På nedenstående billeder kan du se omdannelsen af terrænkøretøjet, når du bevæger dig gennem land og vand.
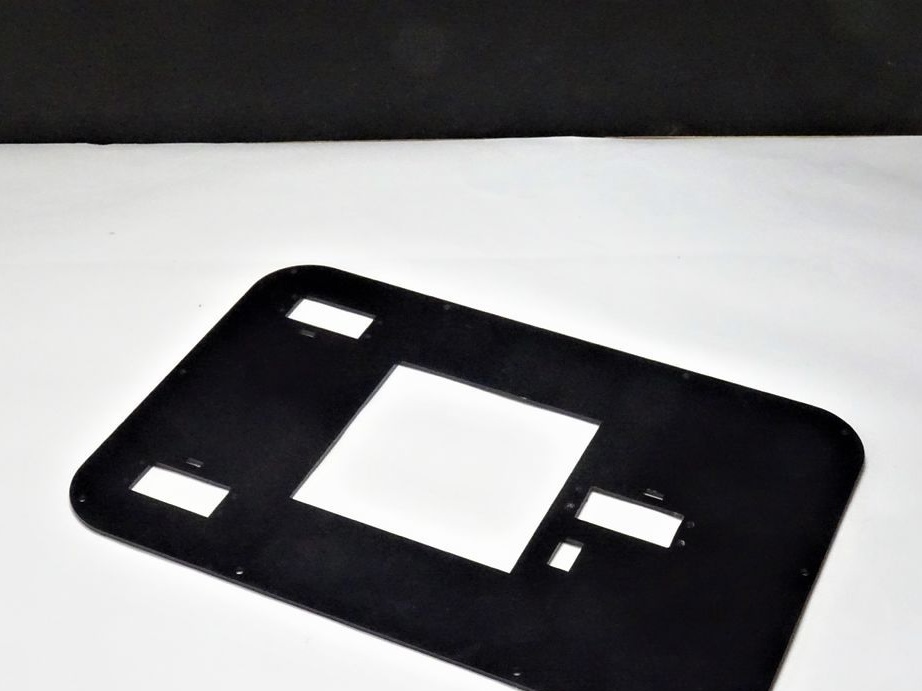
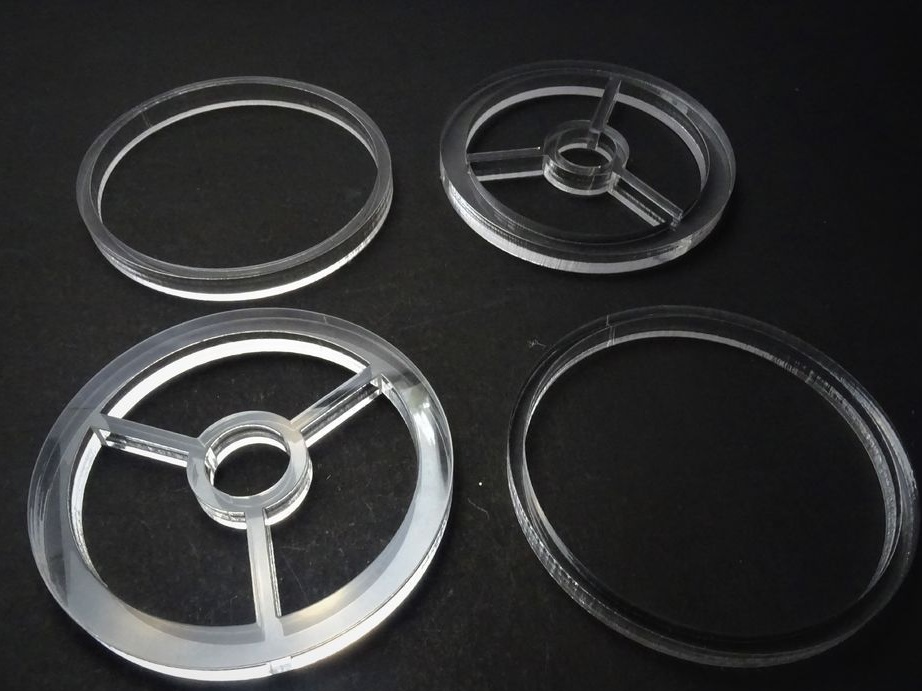
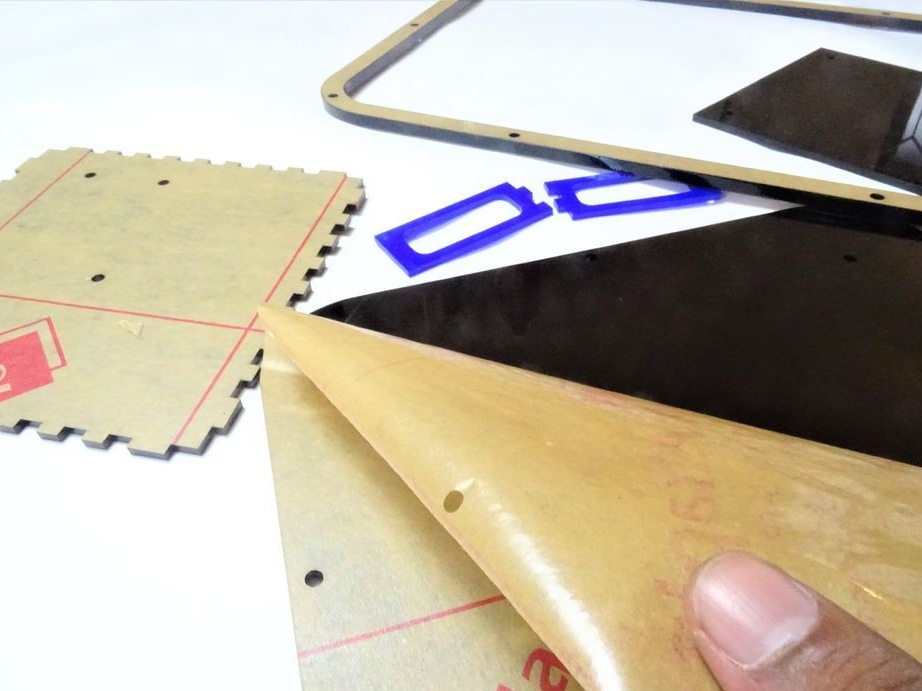
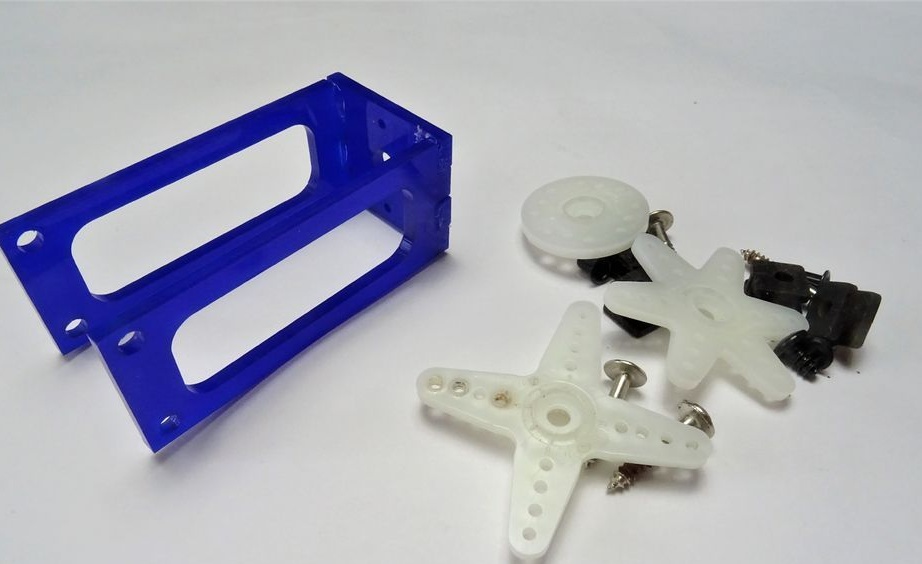
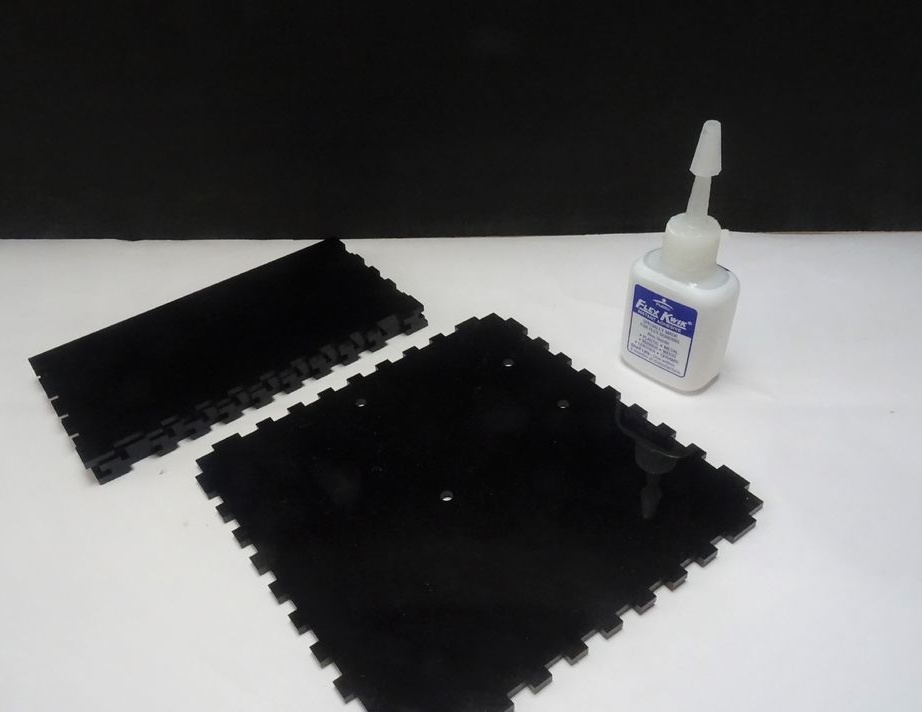
Trin to: Laserskæring
Til terrænkøretøjet brugte skibsføreren akryl i forskellige tykkelser og farver.
Sort topcoat 3 mm x 1
Nederste lag Sort 3 mm x 1
Sort sideramme 5 mm x 2
Sidevæggen gennemsigtig 2 mm x 1
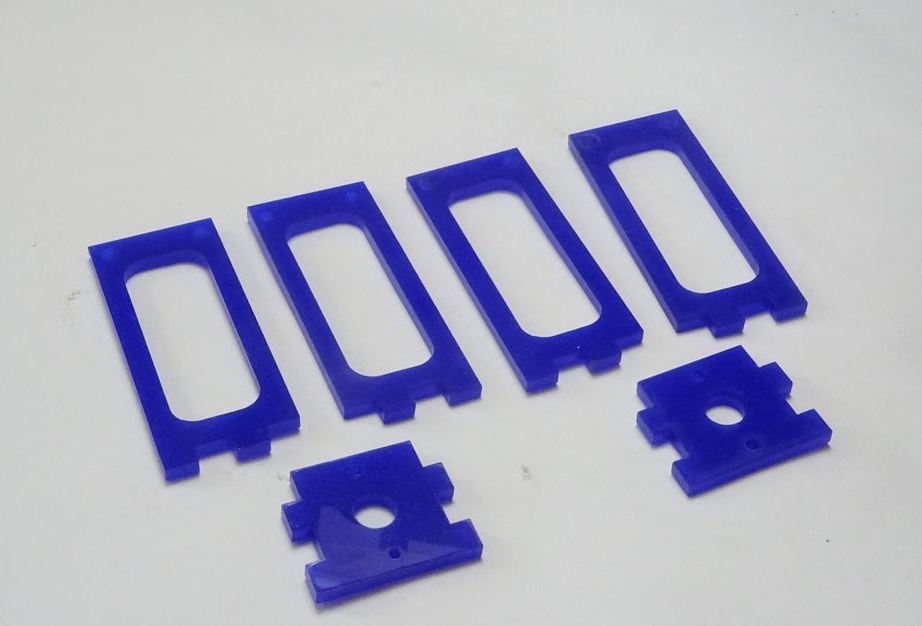
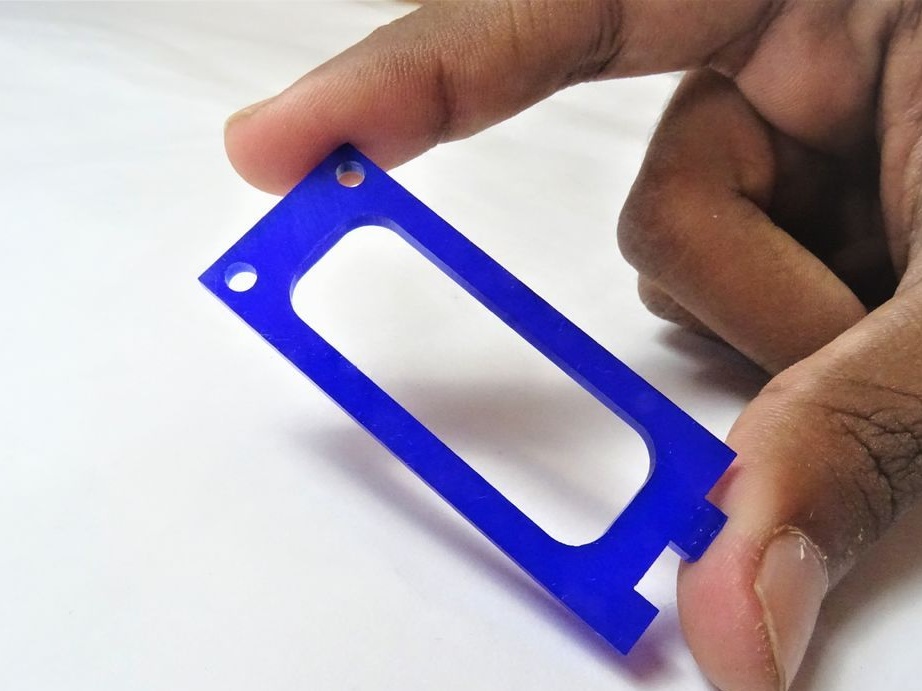
Effekt side blå 3 mm x 4
Bridge Top Stykke Blå 3 mm x 2
Motor DisK Hvid 3 mm x 2
Forhjul hvid 10 mm x 2
Indre kant (baghjul) hvid 3 mm x 4
Yderkant (baghjul) Hvid 10 mm x 2
Styring Hvid 3 mm x 1
Skuffeskab Sort 3 mm x 1
Sort rumafdækning 3 mm x 1
Bagerste motoraksel Hvid 3 mm x 2
Frontpanel hvid 5 mm x 2


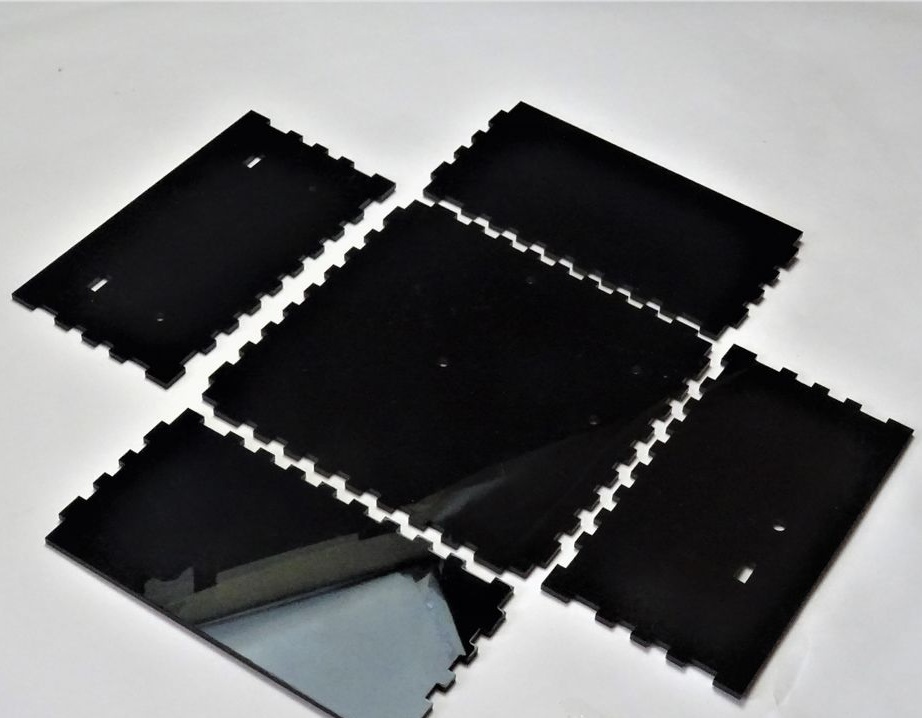

Du kan downloade filen til CNC fra linket.
Laserskæring Rover Parts.zip
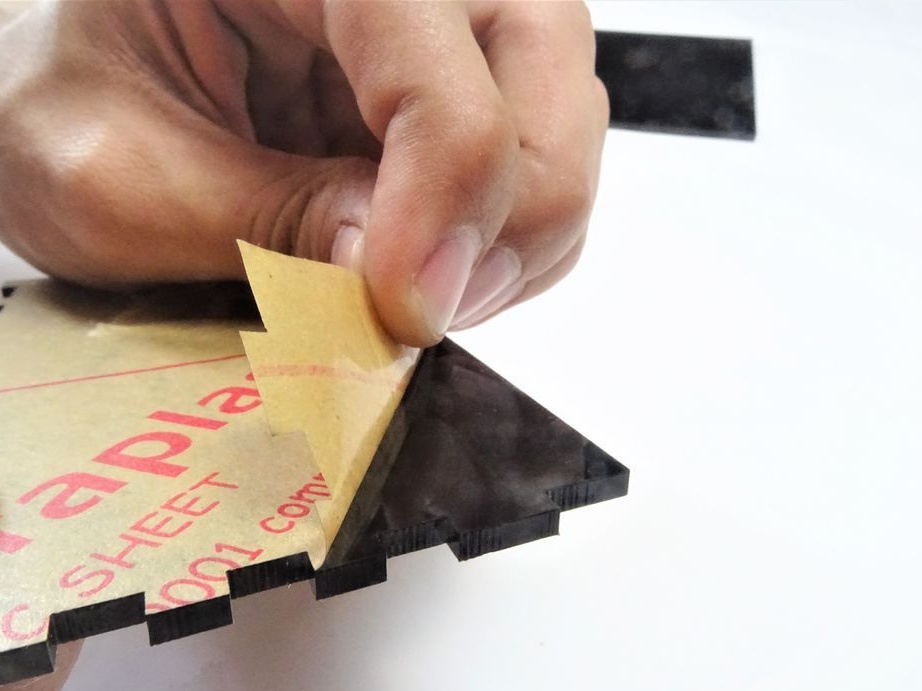
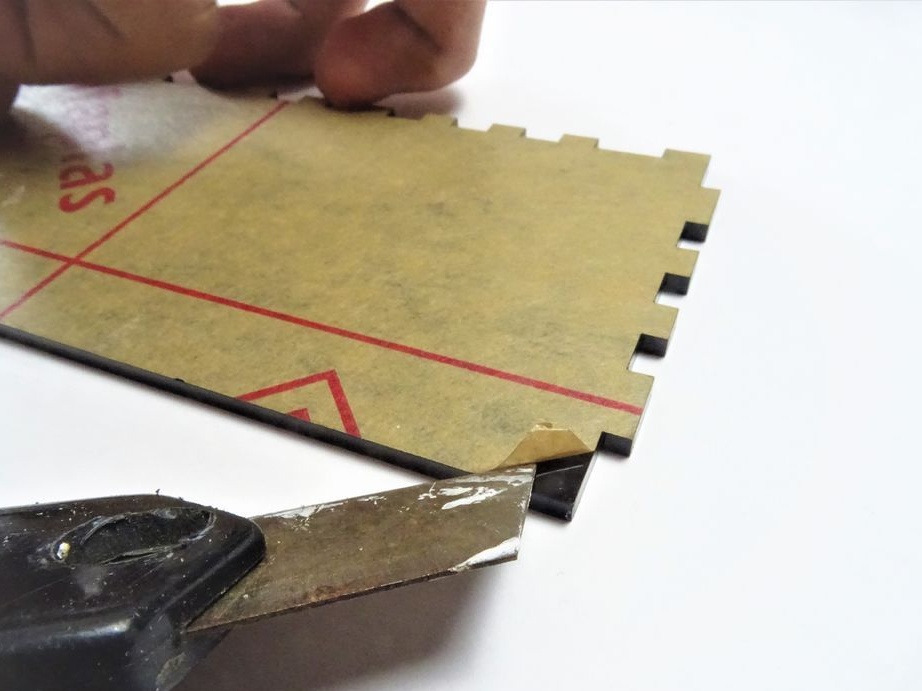
Efter fremstilling af delene fjernes beskyttelseslaget fra dem.
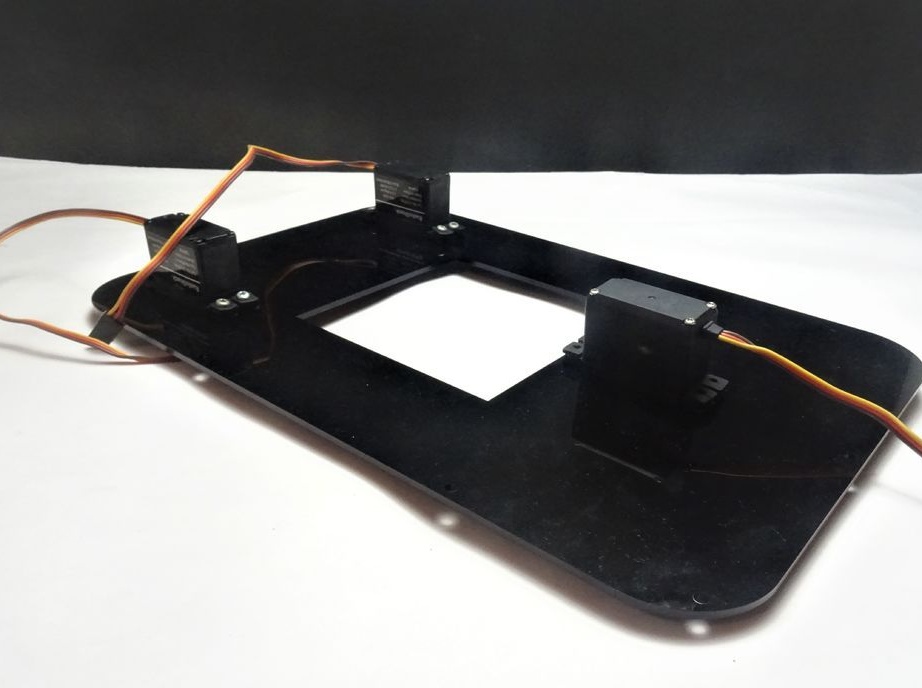
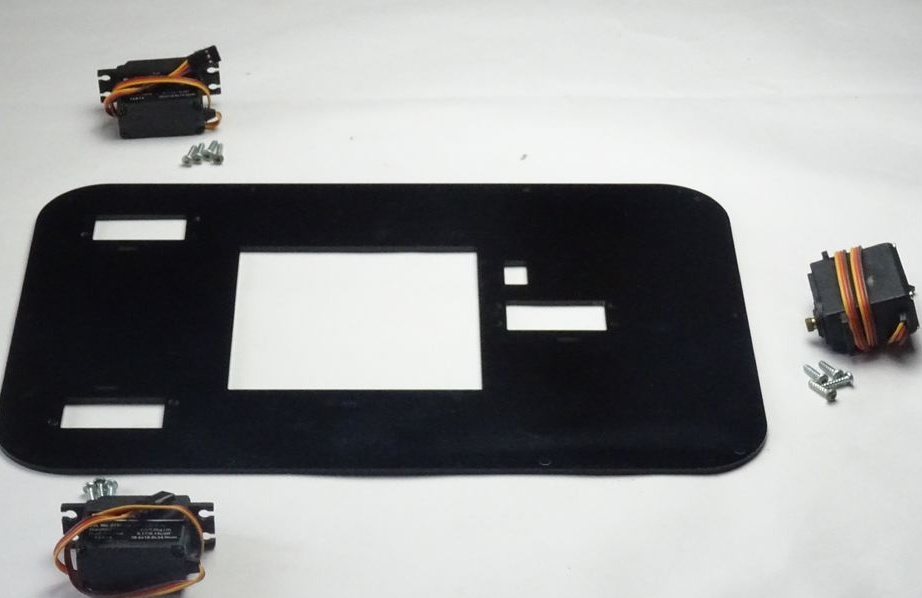
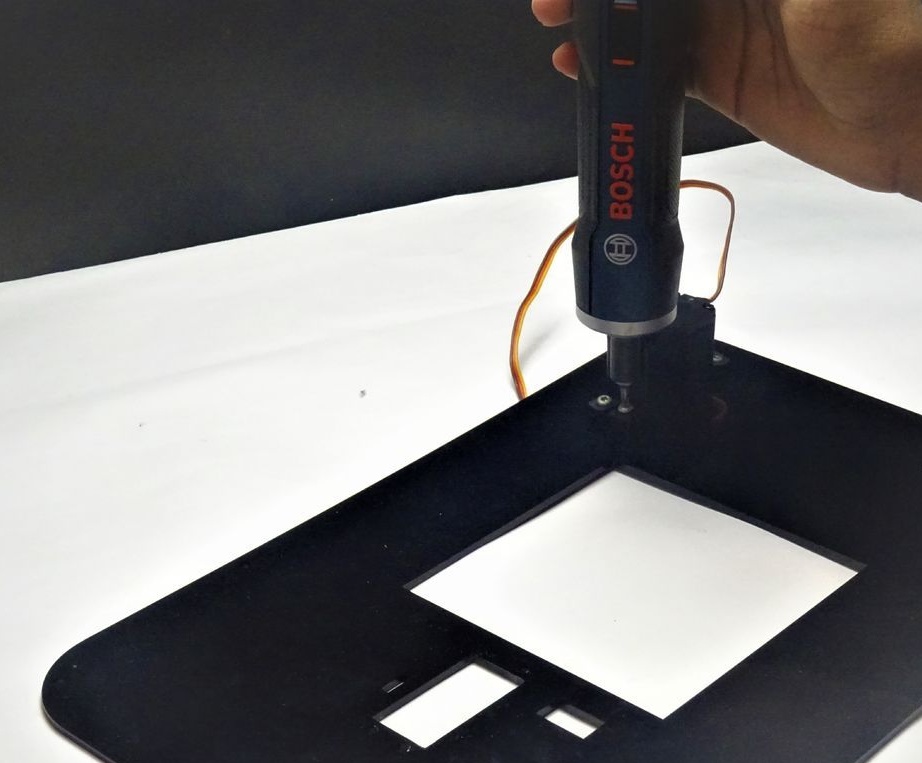
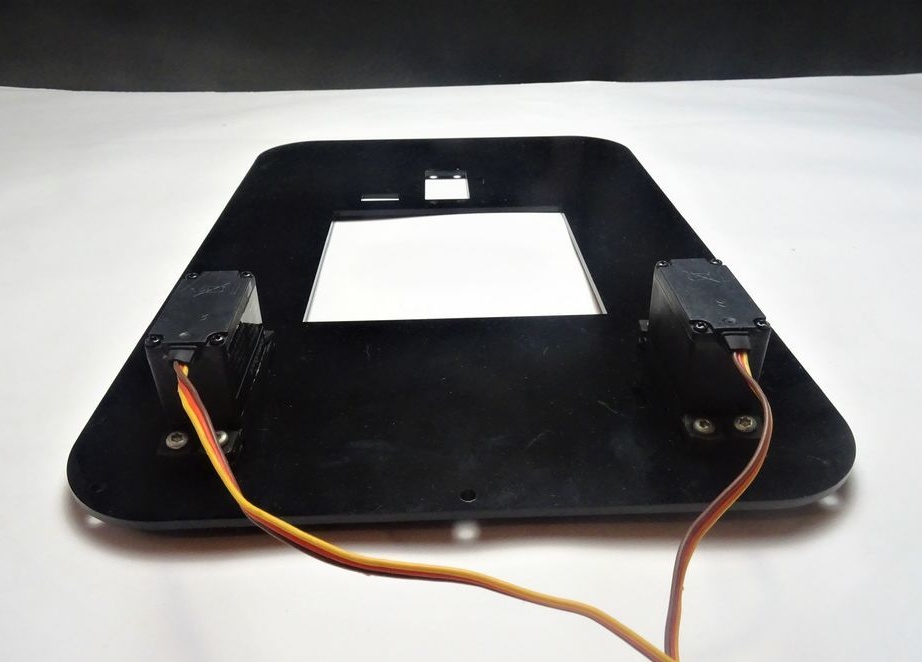
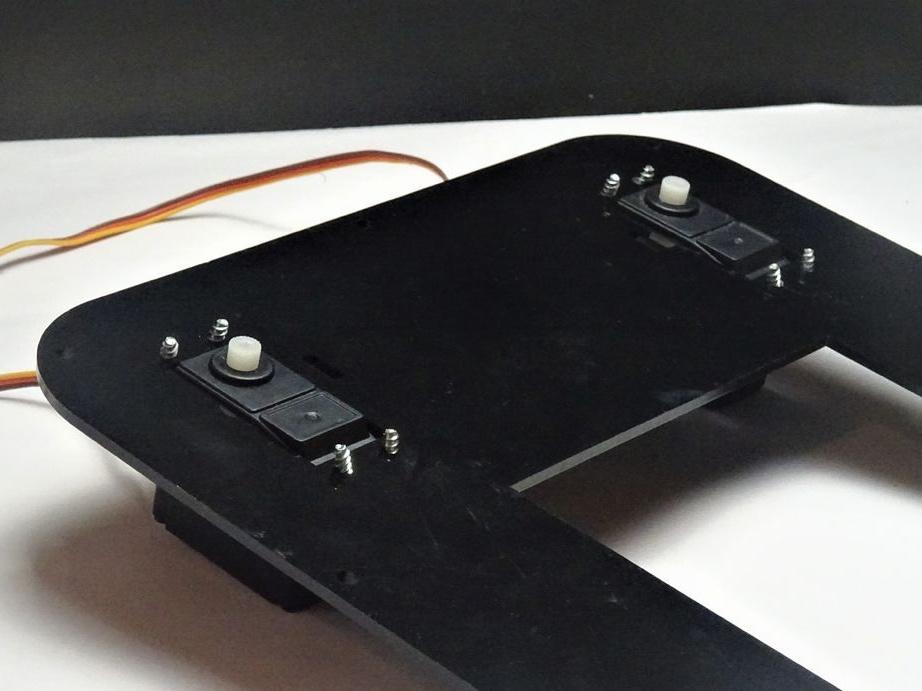
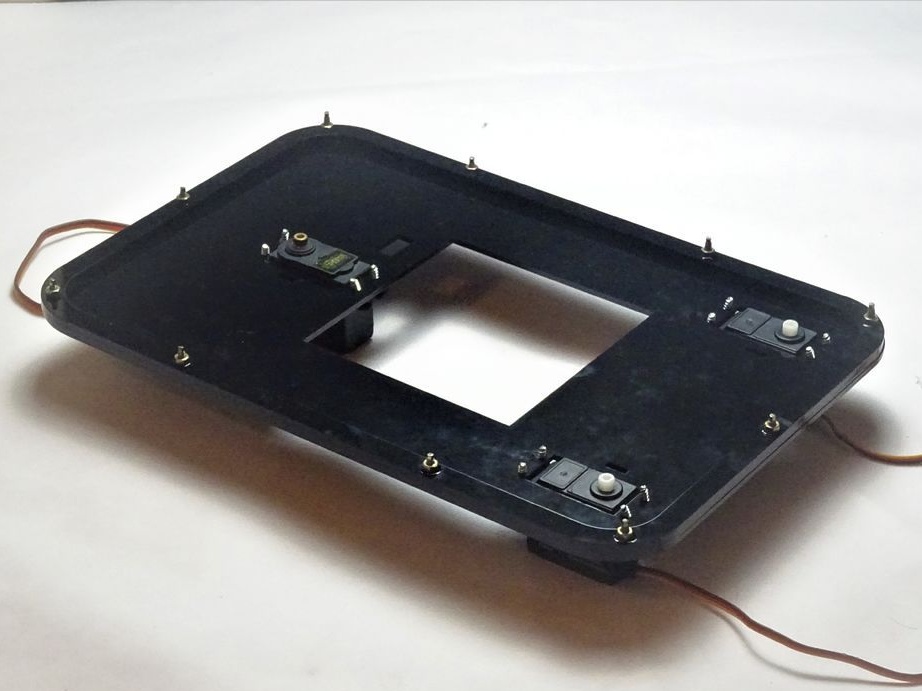
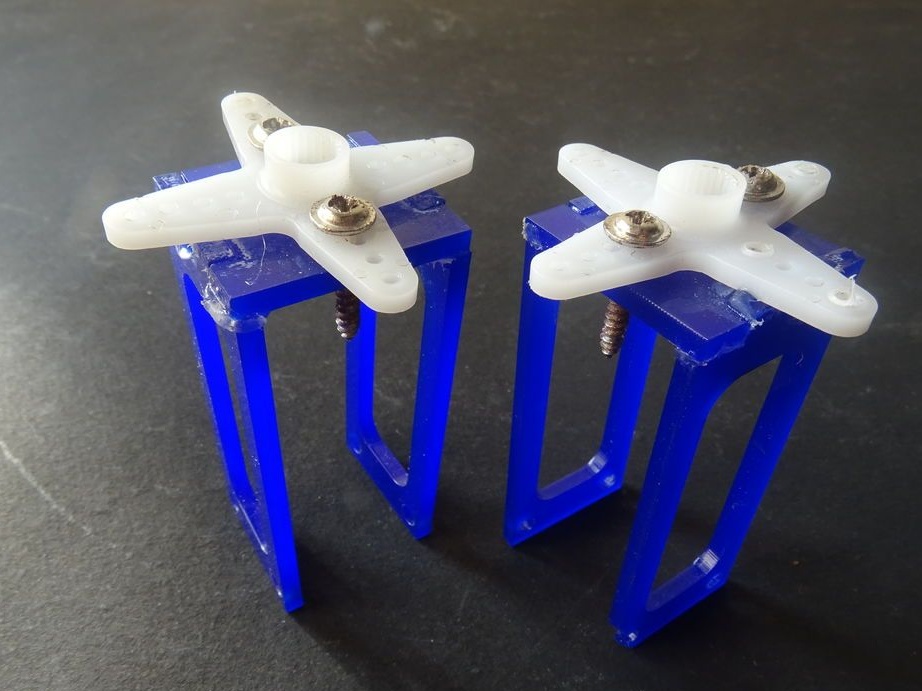
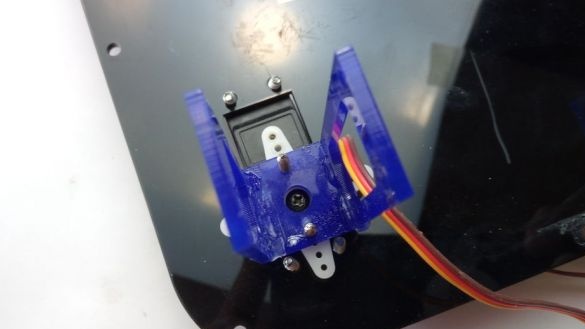
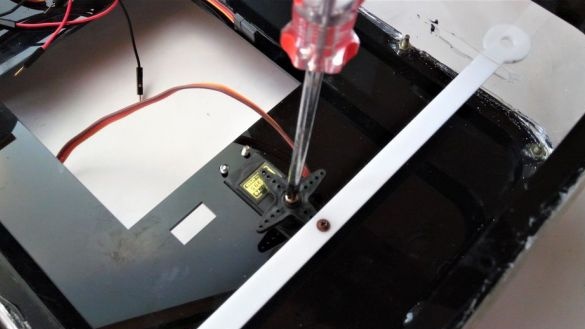
Trin tre: Installer servomotorer
Alle tre servomotorer er skruet fast på platformen. To bagpå og en foran.
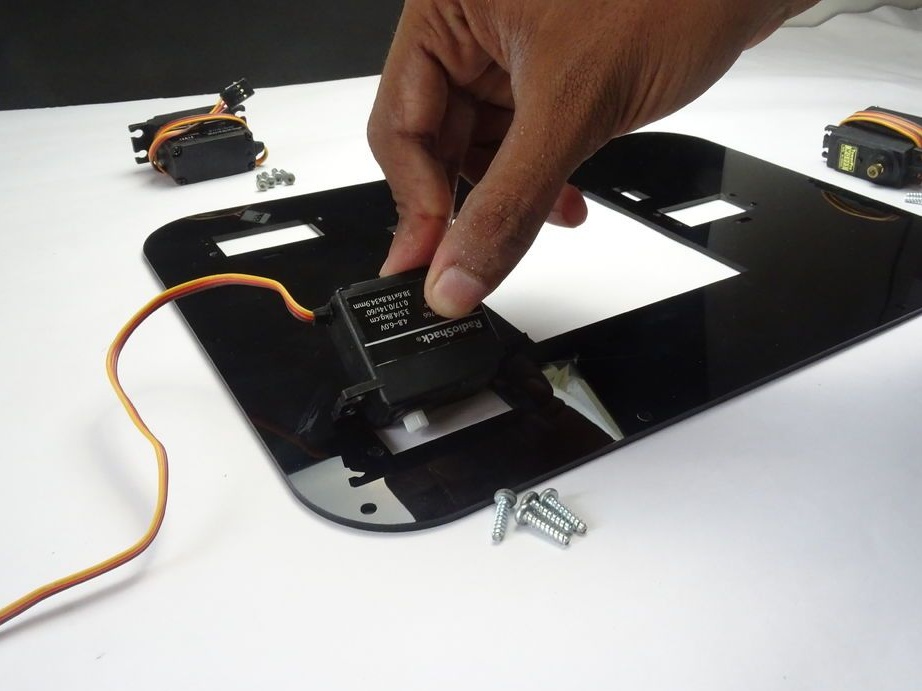

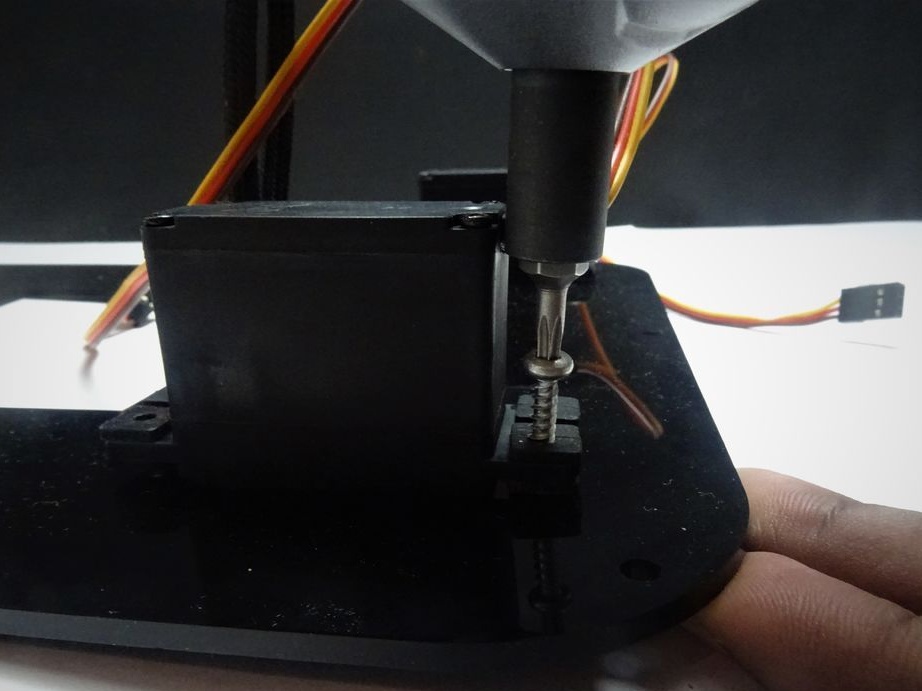
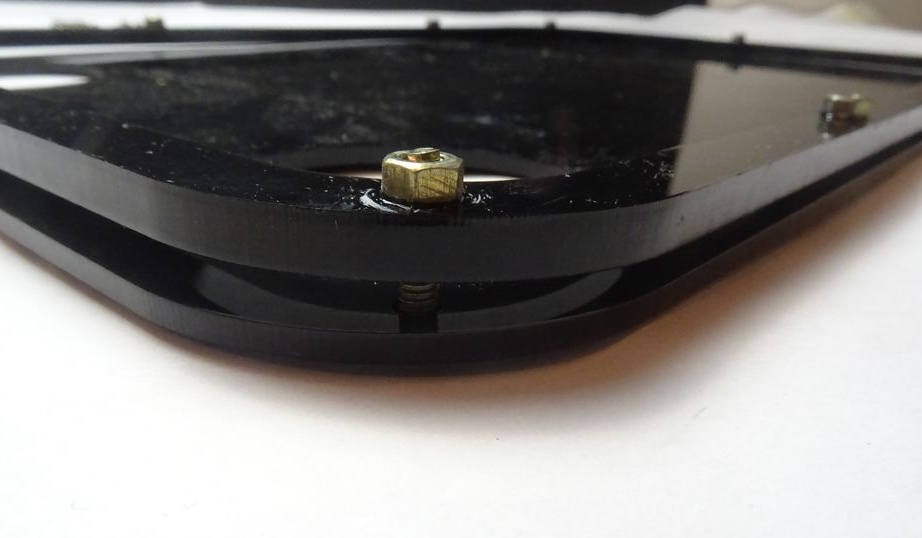
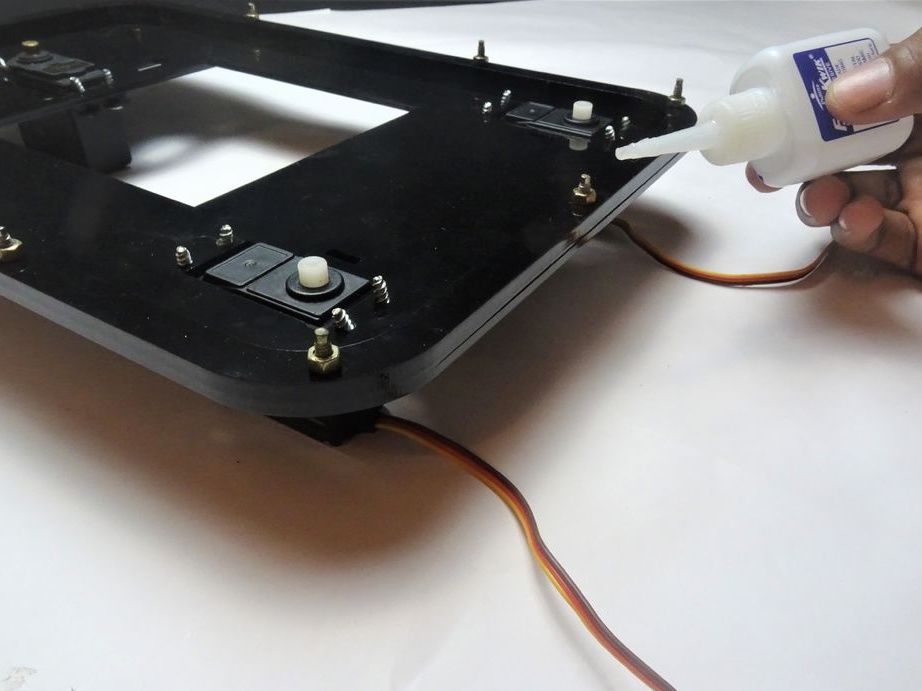
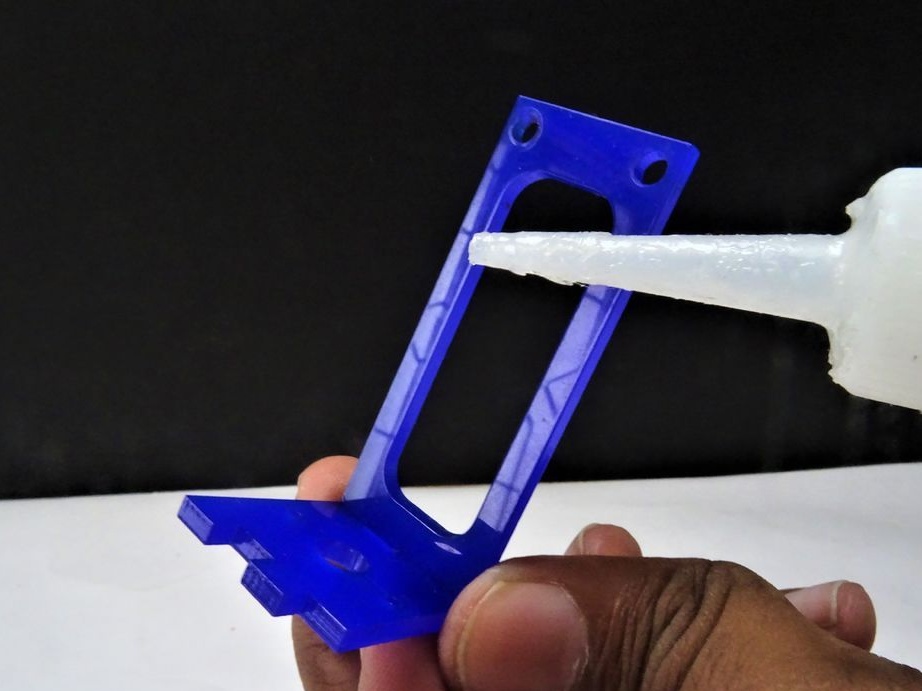
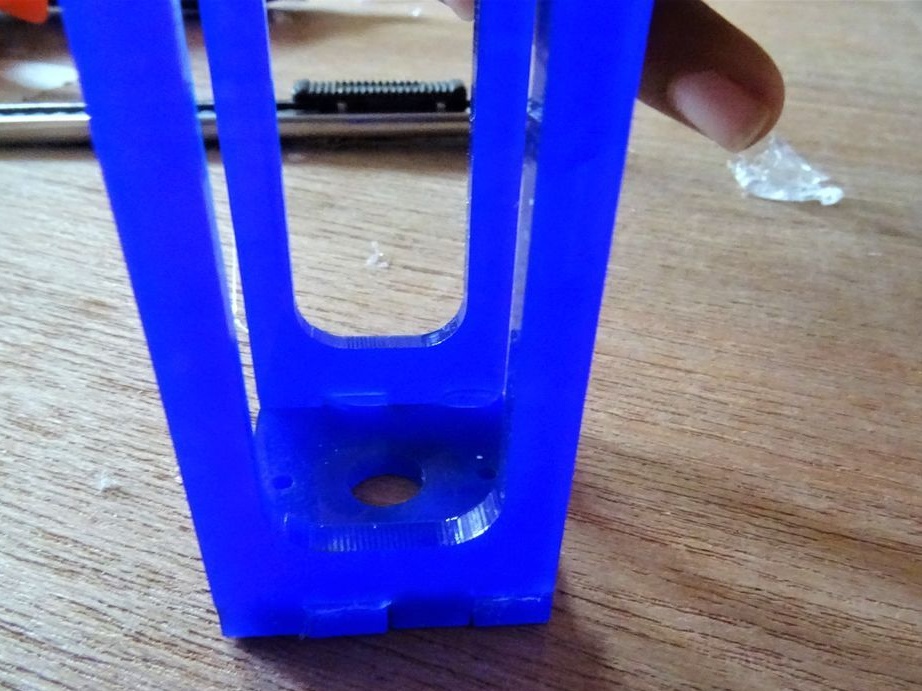
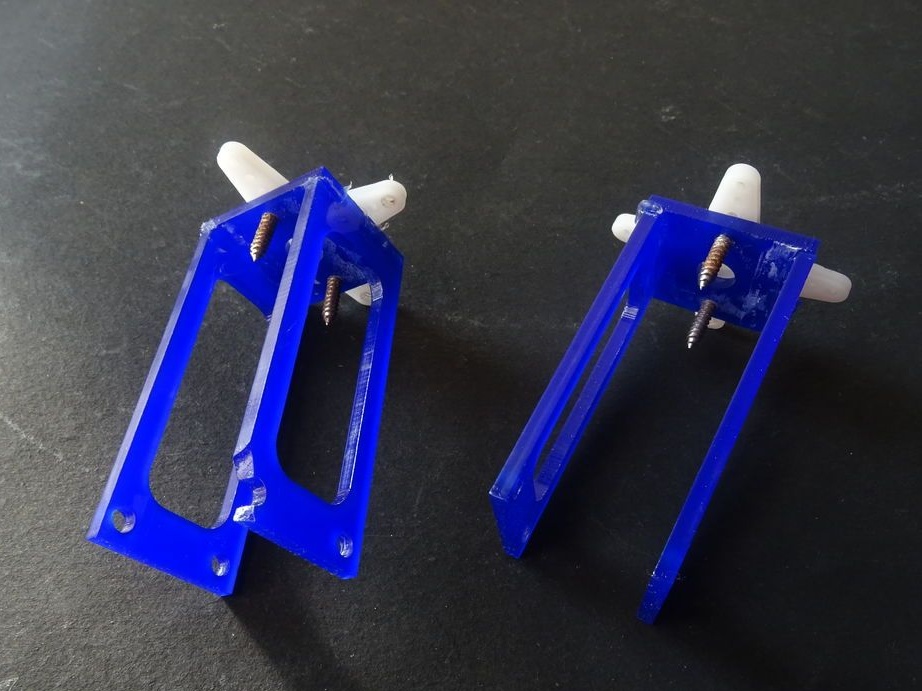
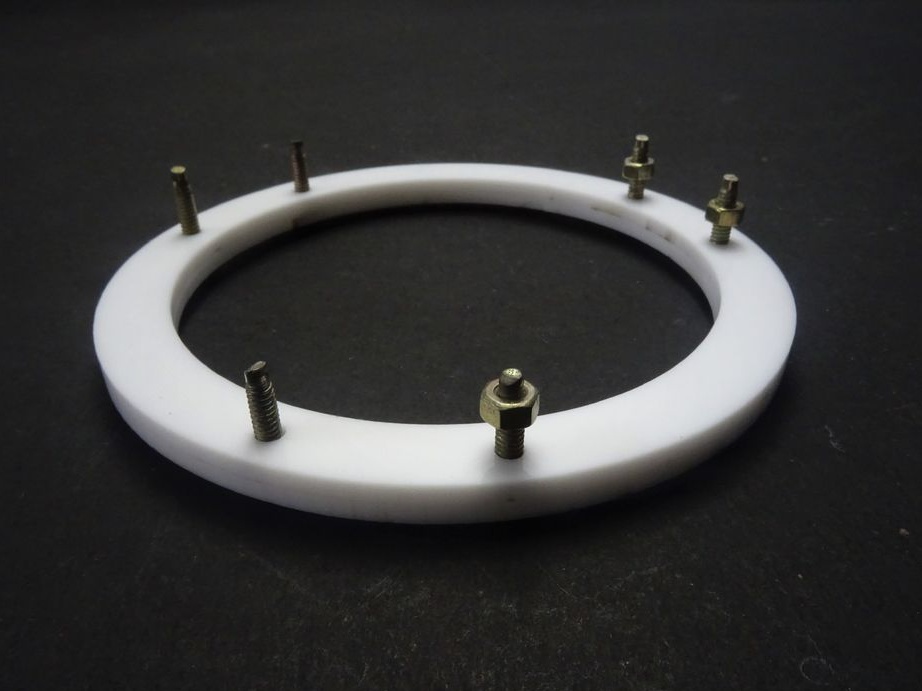
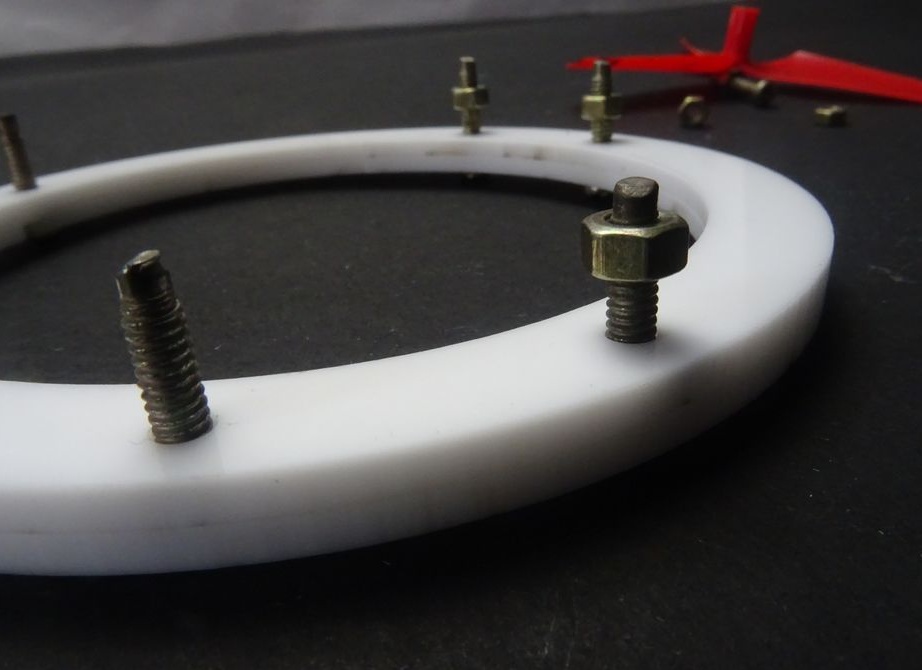
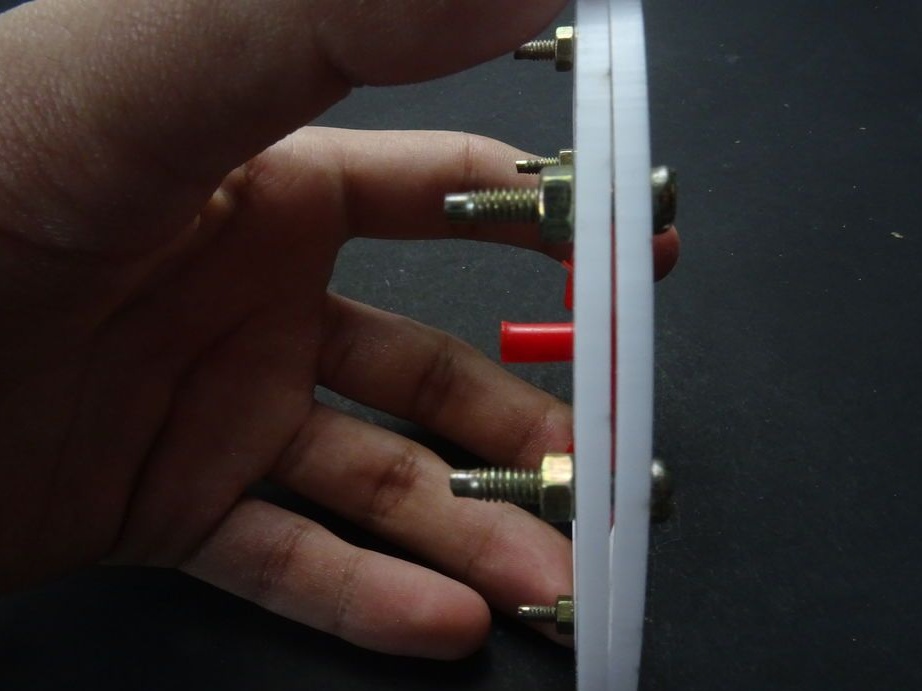
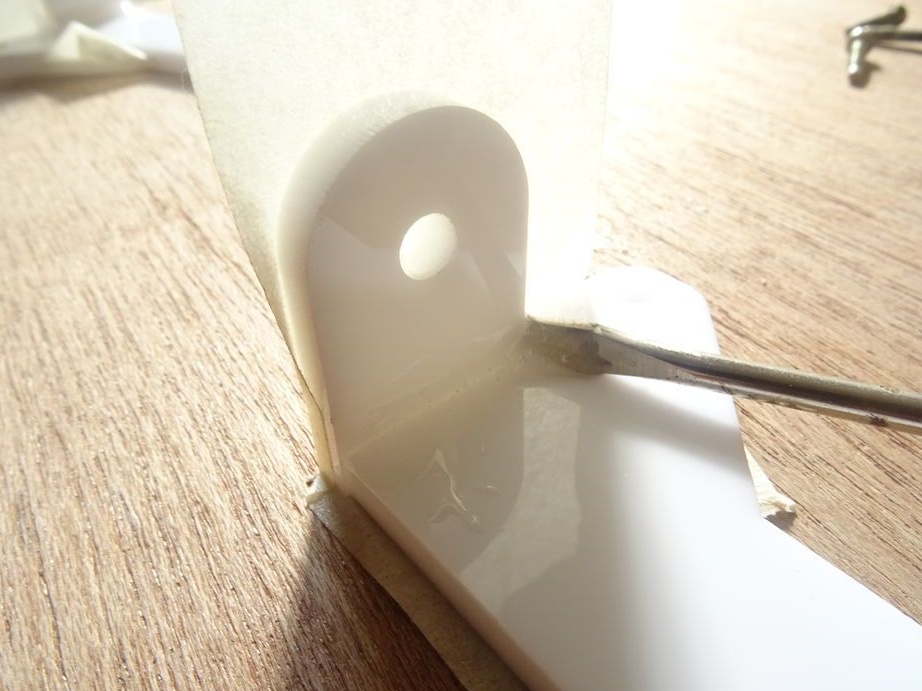
Trin fire: nødder
For at få adgang til mekanismerne boltes de øvre og nedre dele sammen. Lim møtrikkerne på superlimet på rammen og forstærker det derefter med epoxy.


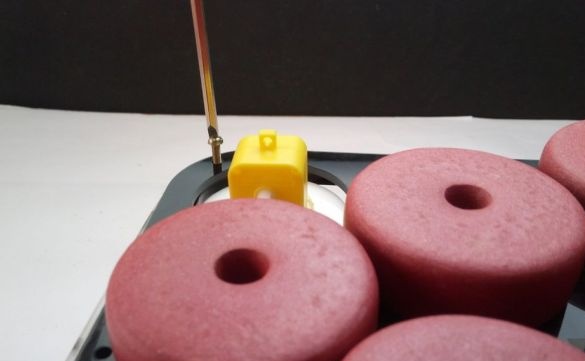
Trin fem: Floats
Lim flyder.



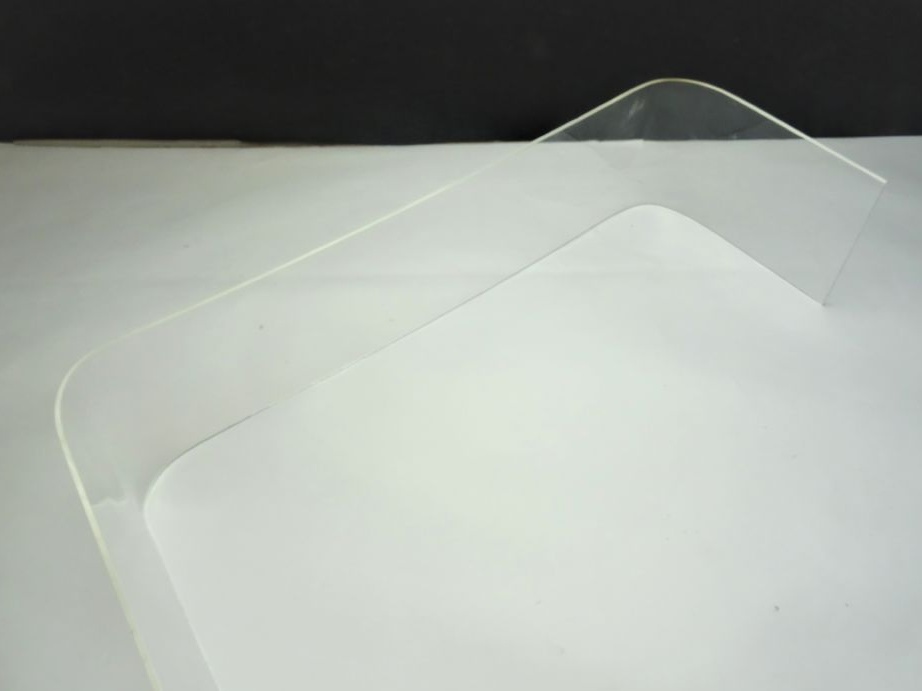
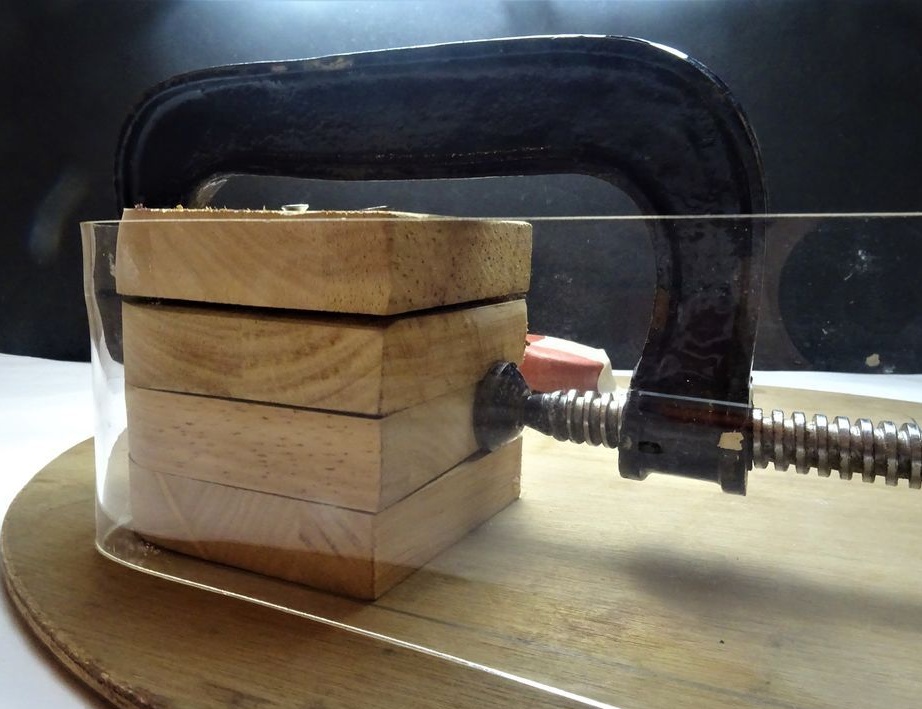
Trin seks: Formning af akryl
For at bøje akryl laver en håndværker en skabelon af træ.



Han klemmer delen med en klemme, og opvarmer den med en hårtørrer giver delen den ønskede form.





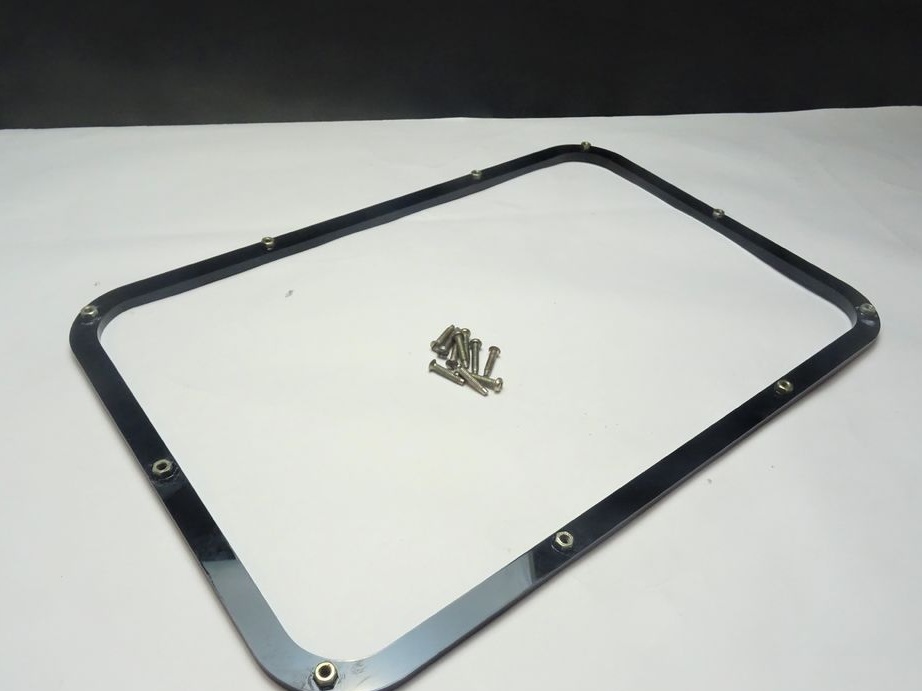
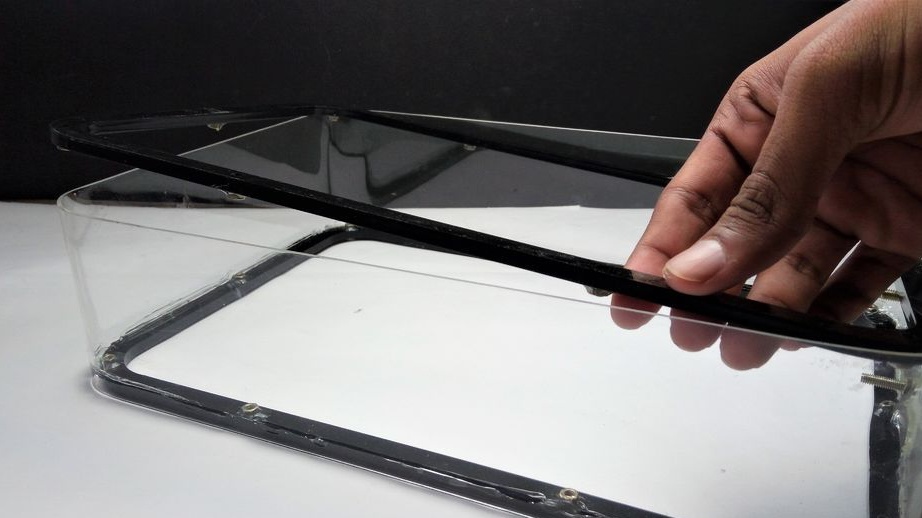
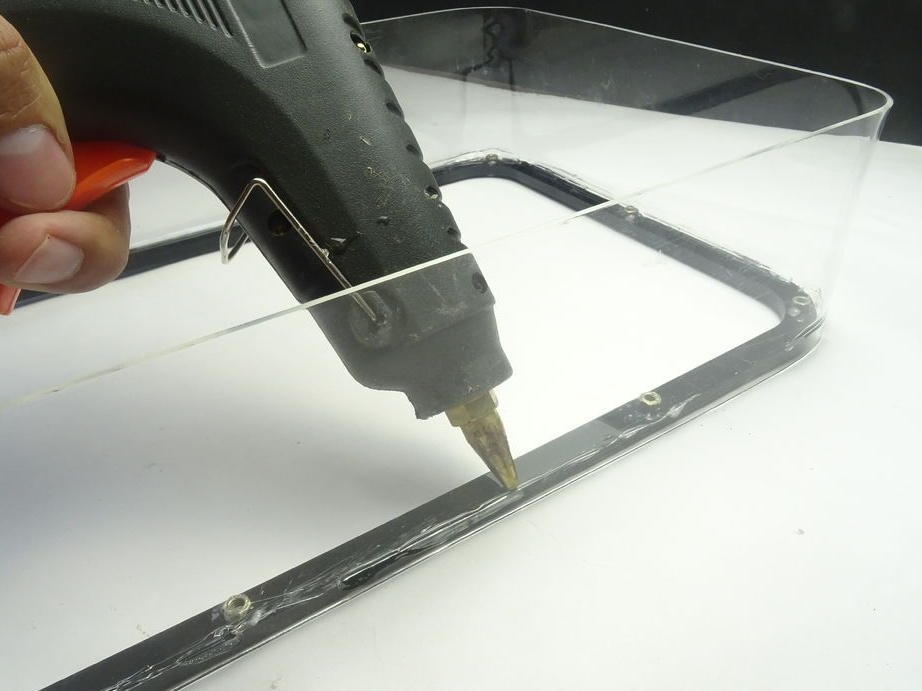
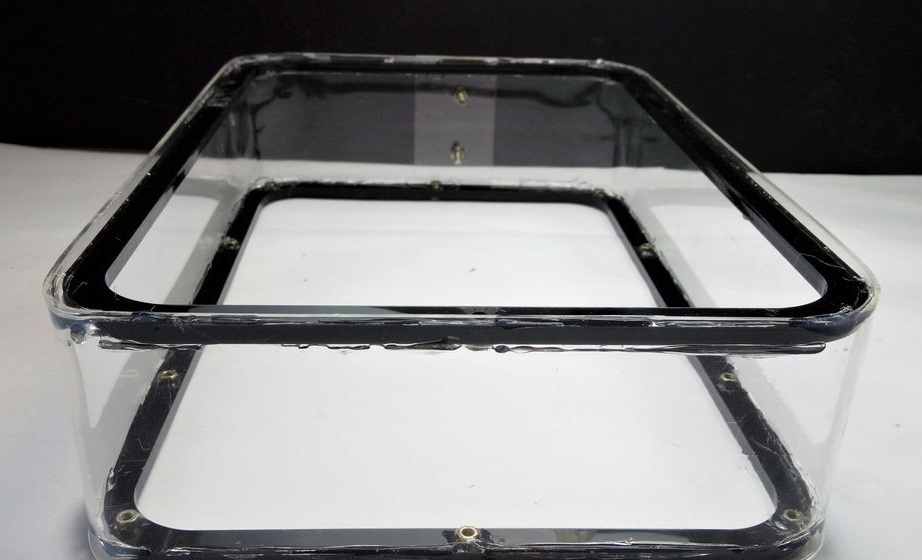
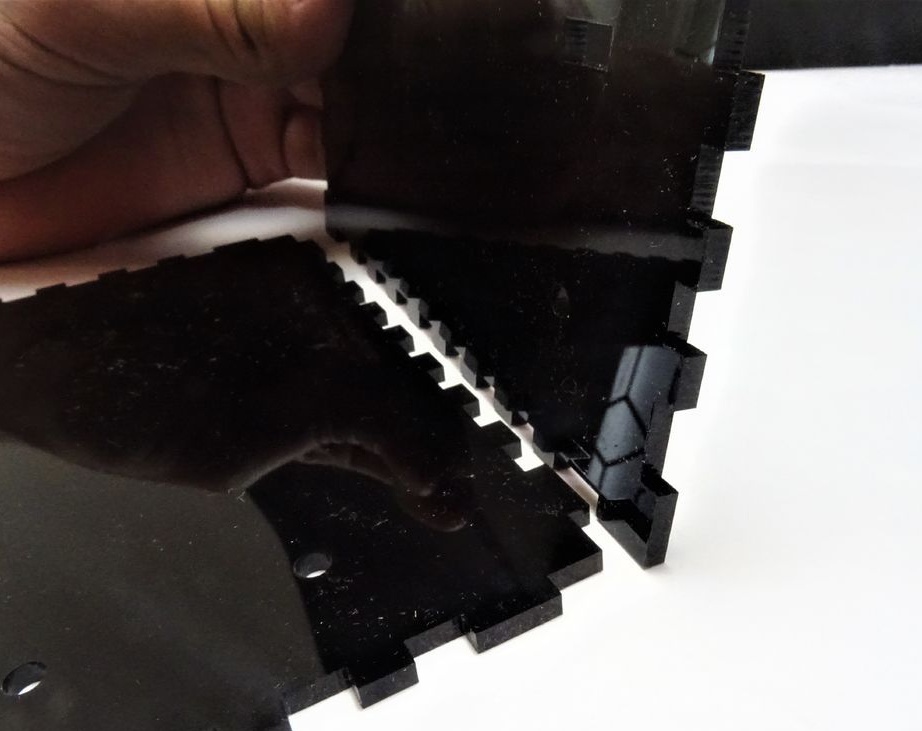
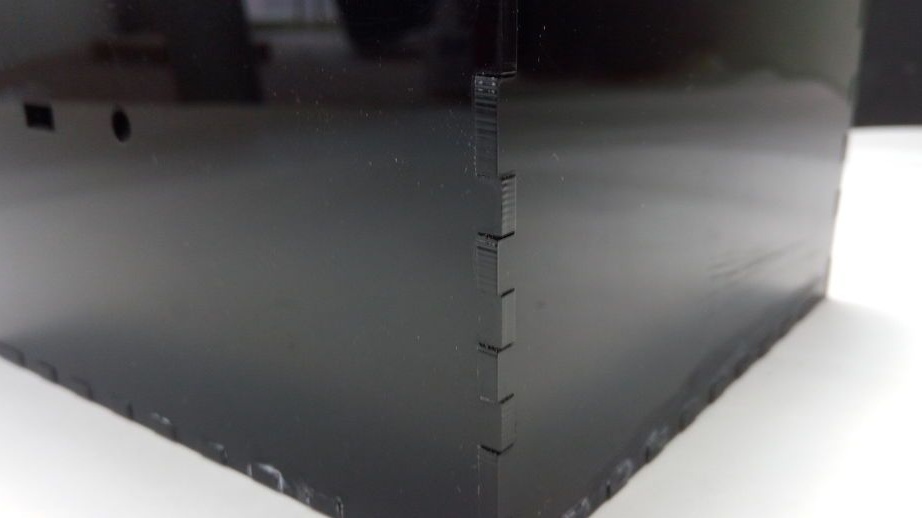
Syvende trin: ramme
Limer de øverste og nedre rammer på det gennemsigtige organ. Sømmene er forsigtigt forseglet med varm lim.







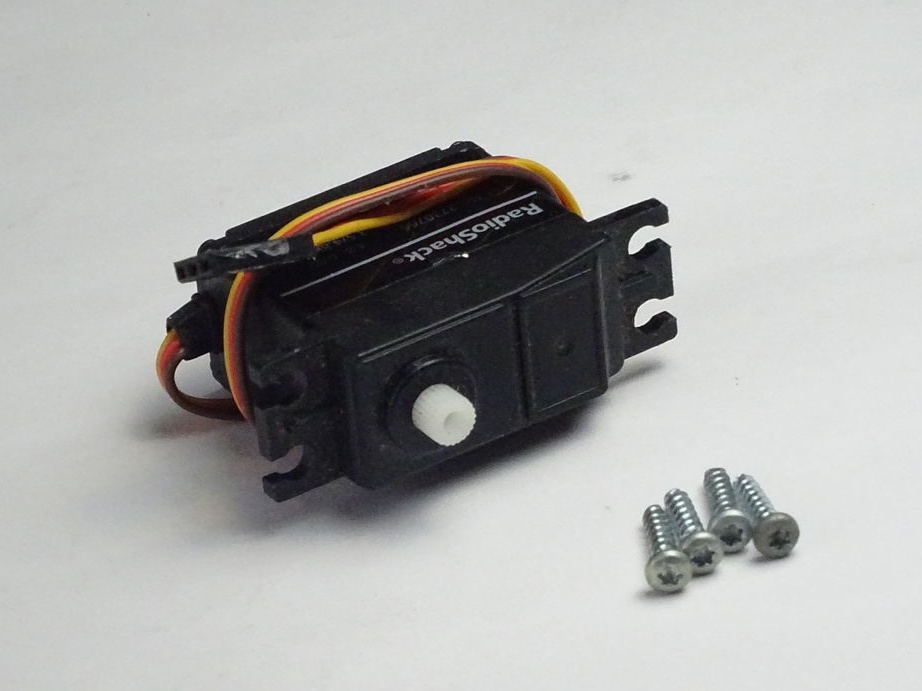
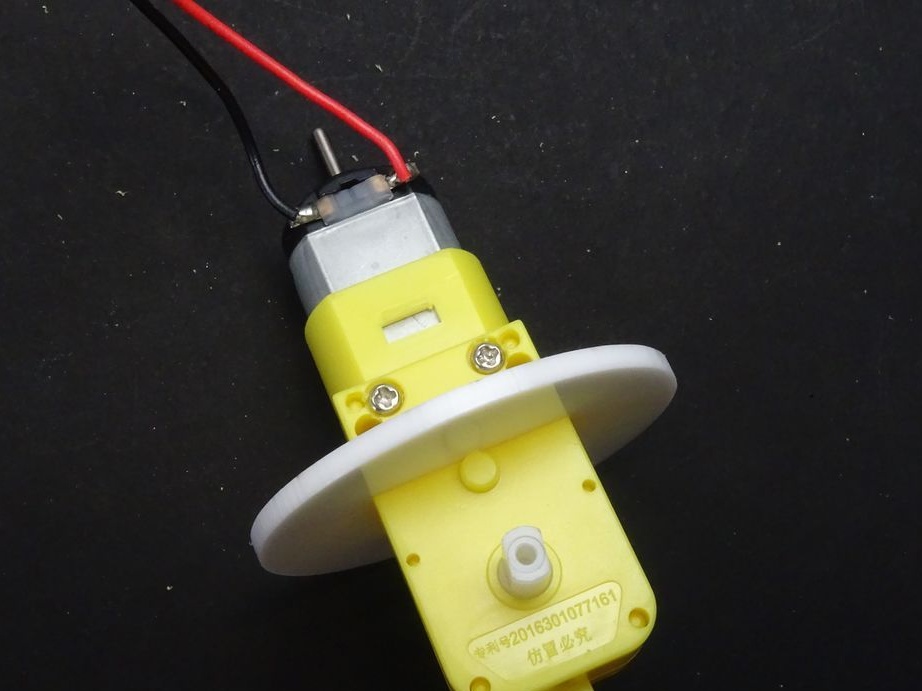
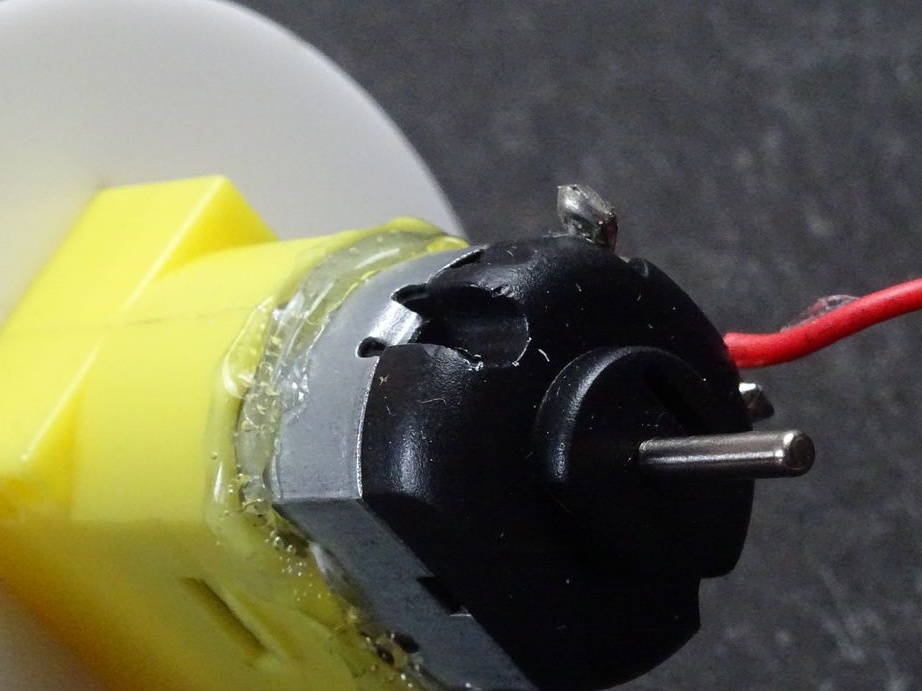
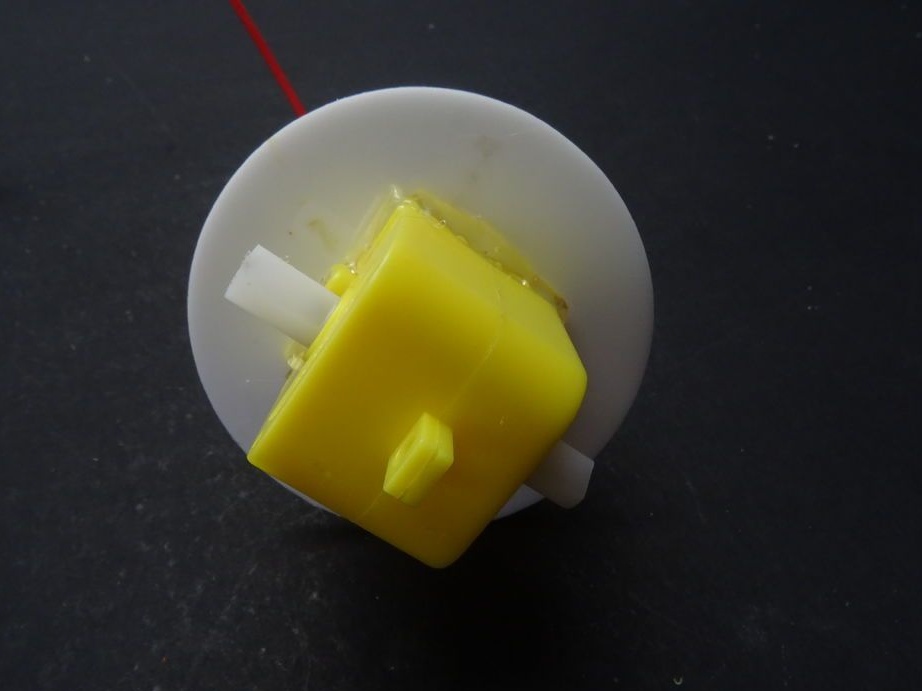
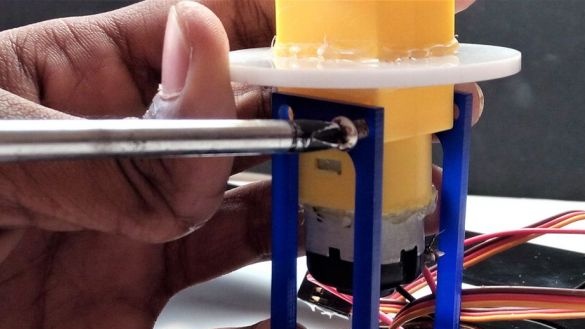
Trin otte: Motortuning
Nu skal du behandle motorhuset for at installere dele på det.
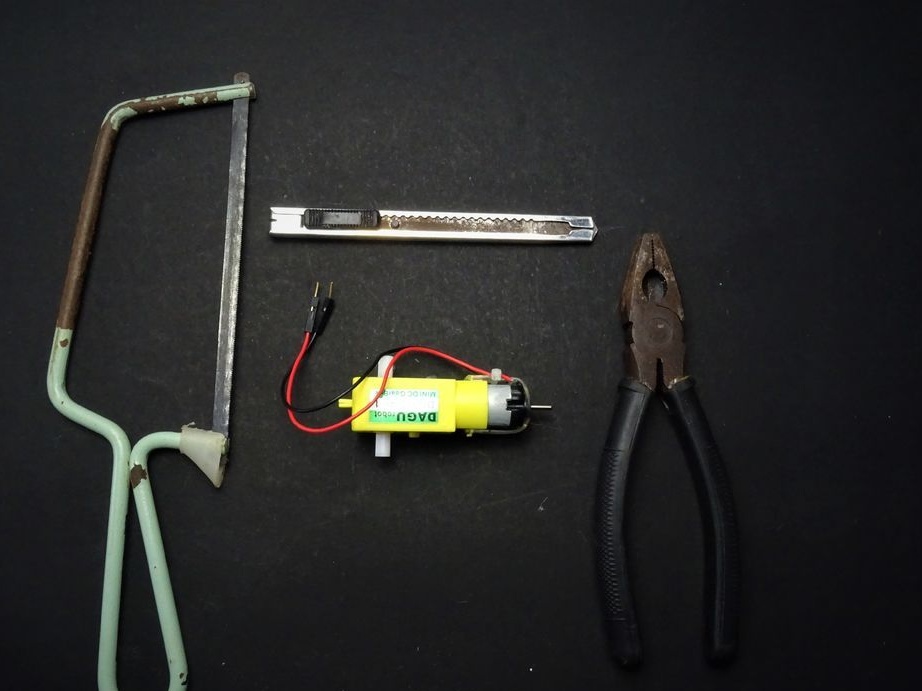
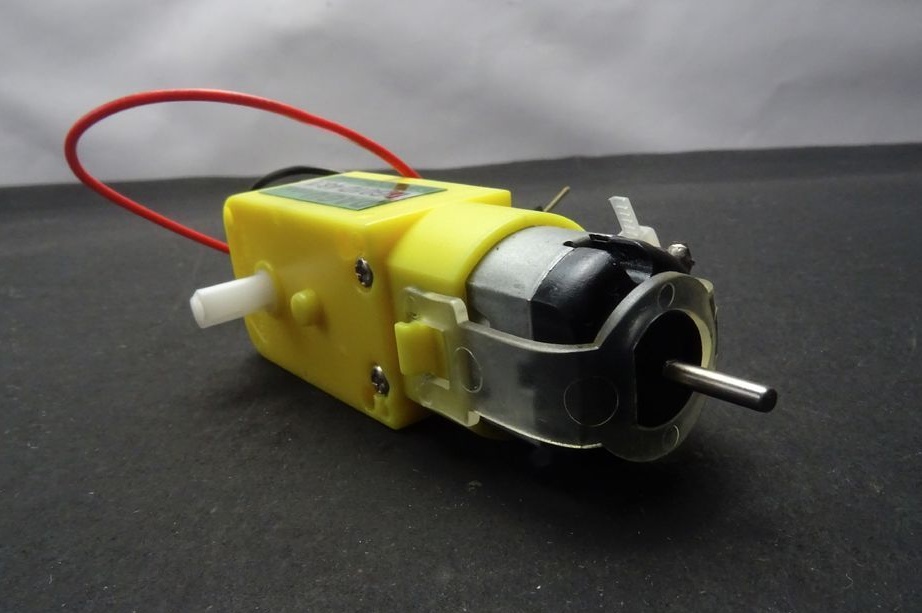
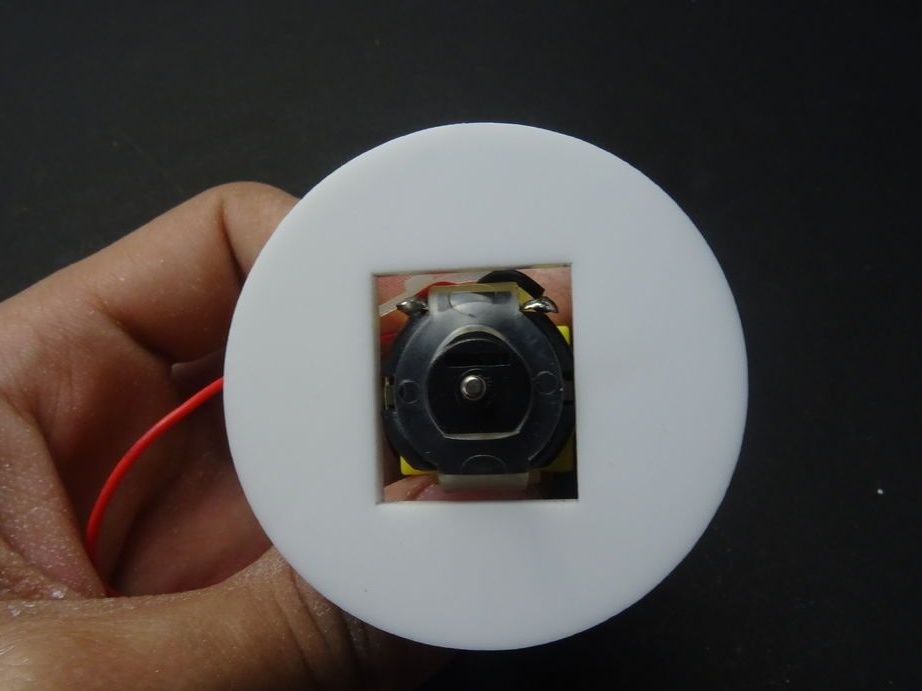
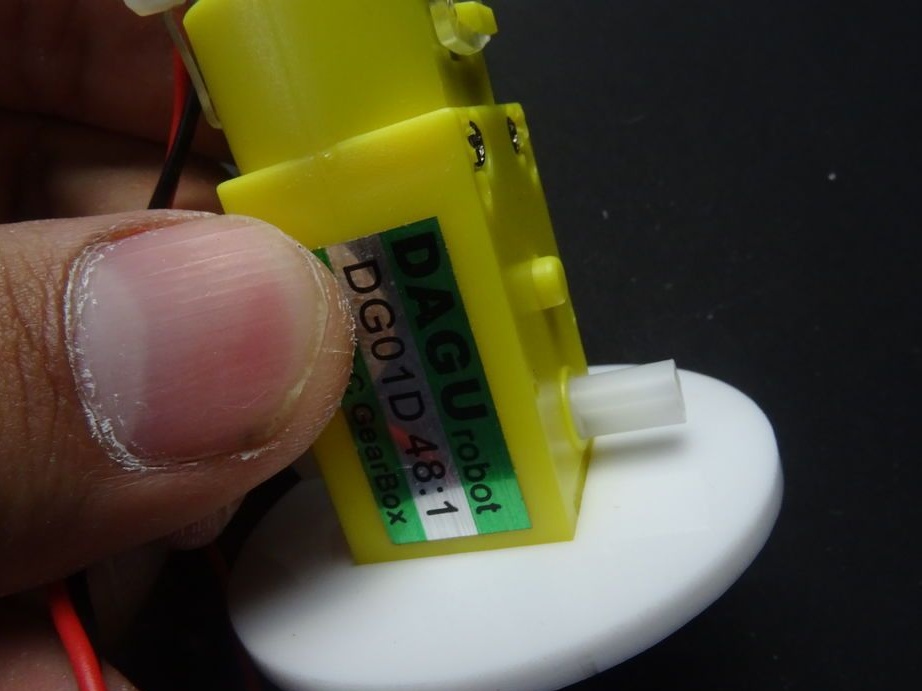

Skærer alle fremspringende dele fra kroppen op til klistermærket.
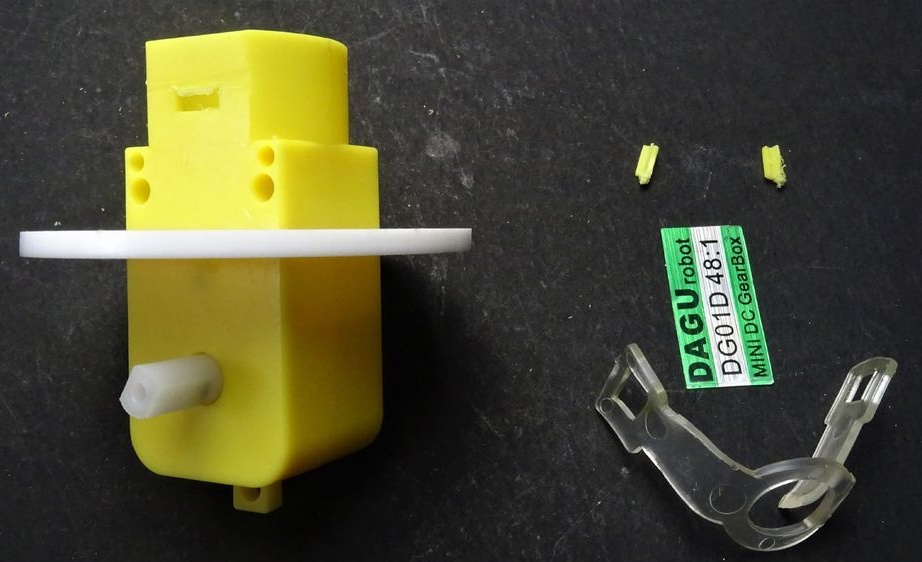

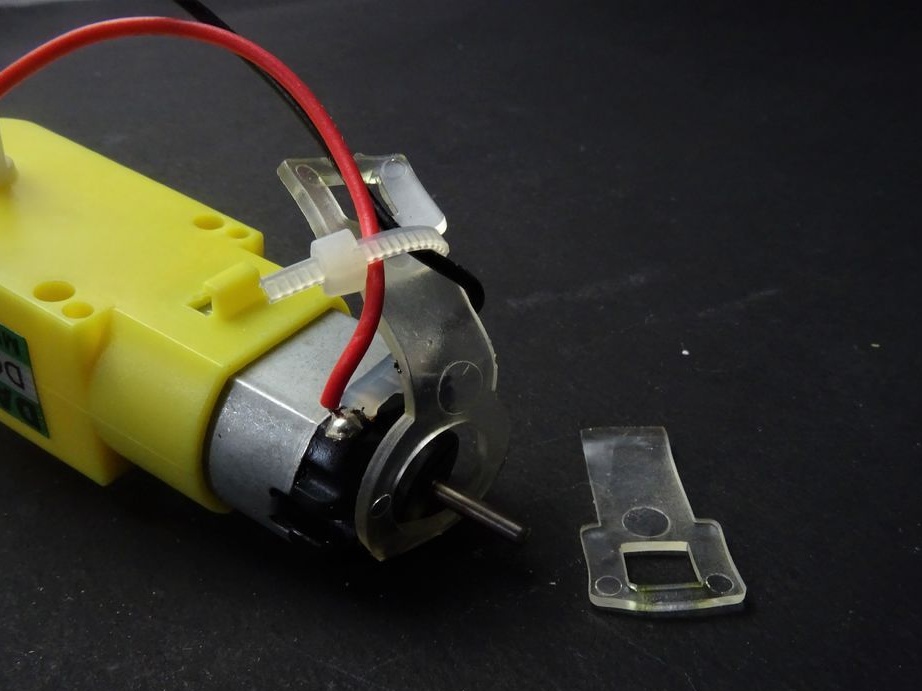
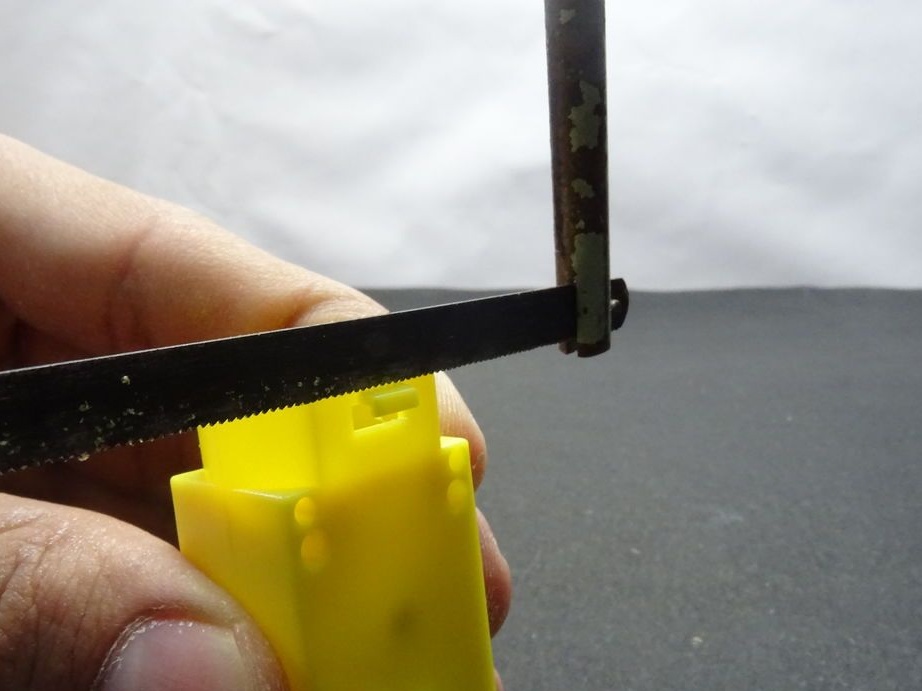


Installerer delen på kroppen og limer den. Da det var nødvendigt at afskære motorholderen (låse), fikseres motoren også med lim.

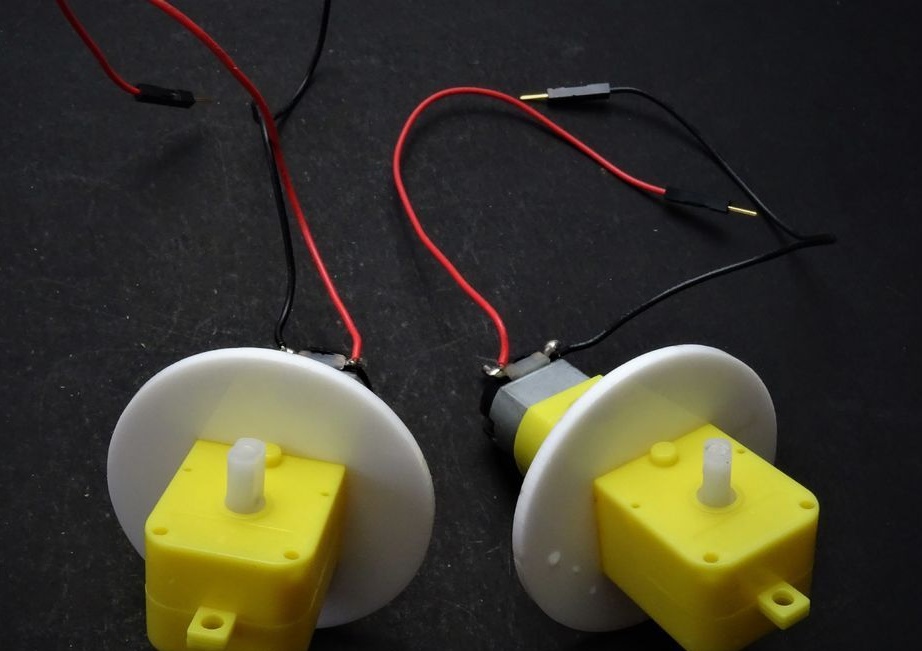

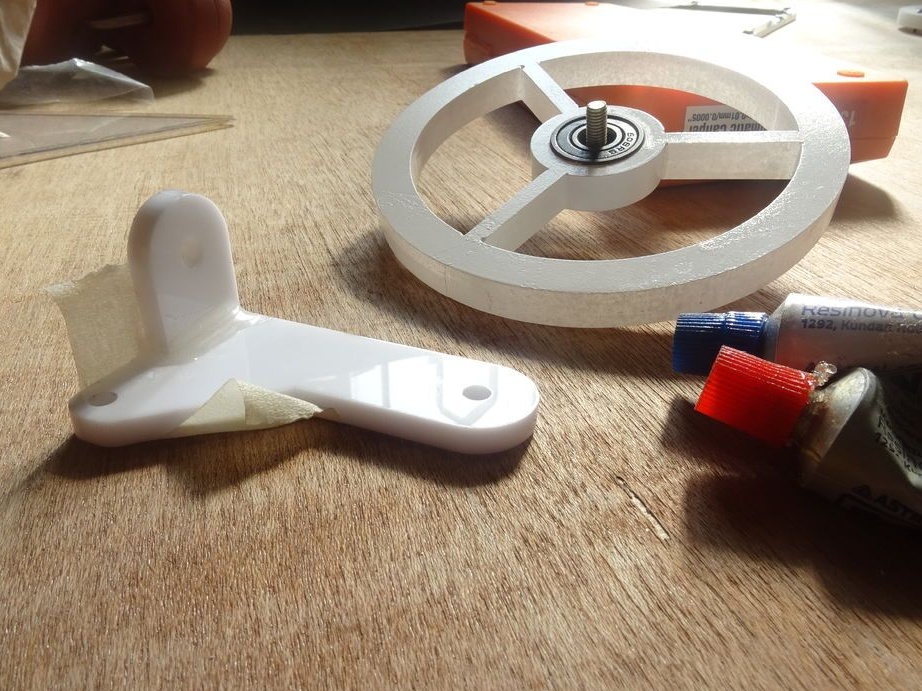
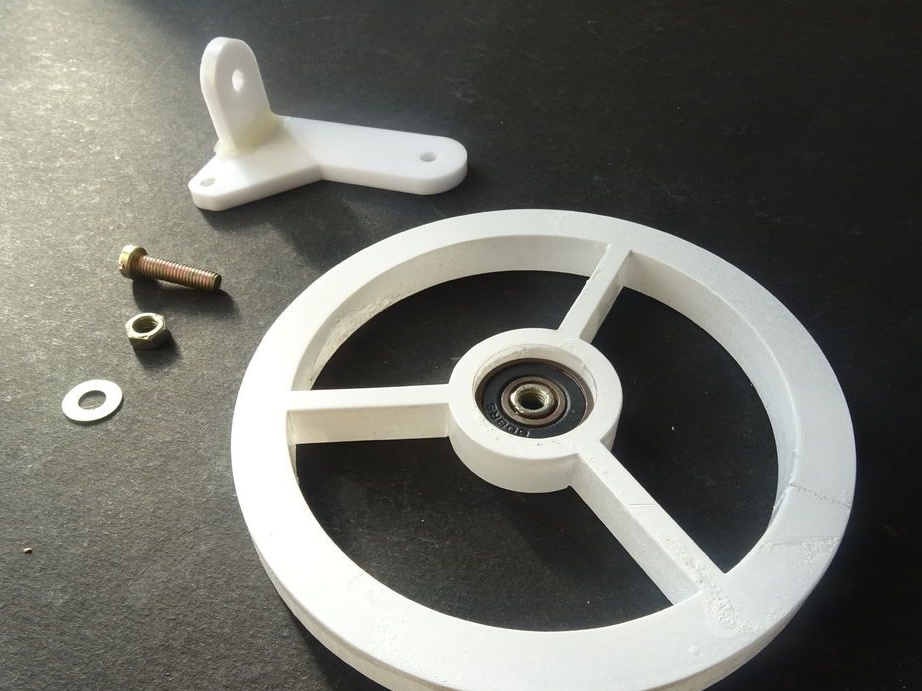
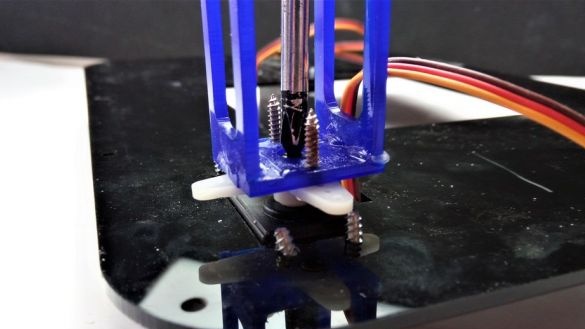
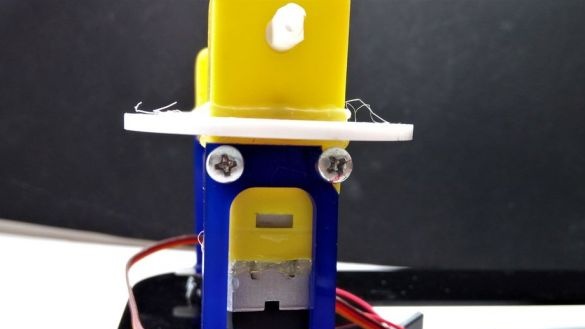
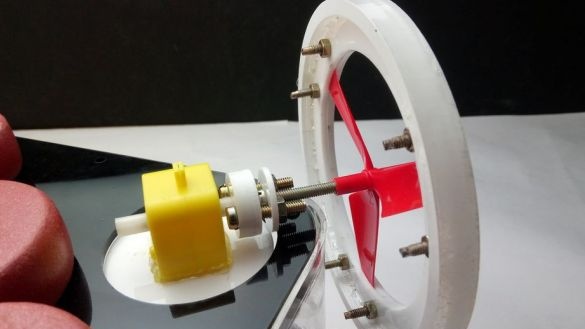
Trin ni: Drejningsmekanisme
Samler et roterende hus. Der installeres en motor i den, og den tilsluttes til servodrevet.
Limer sagen.

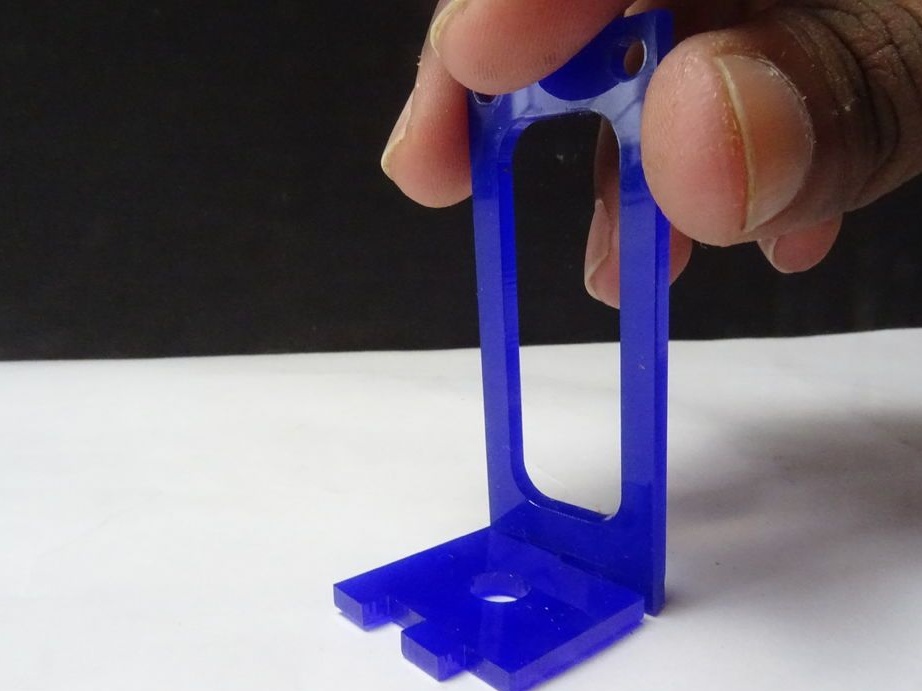

Skruer på koblingen.


Trin ti: Maleri
Da skibsføreren ikke havde hvidt akryl med den krævede tykkelse, blev hjulene og kanten skåret ud af gennemsigtig akryl og derefter malet hvidt.




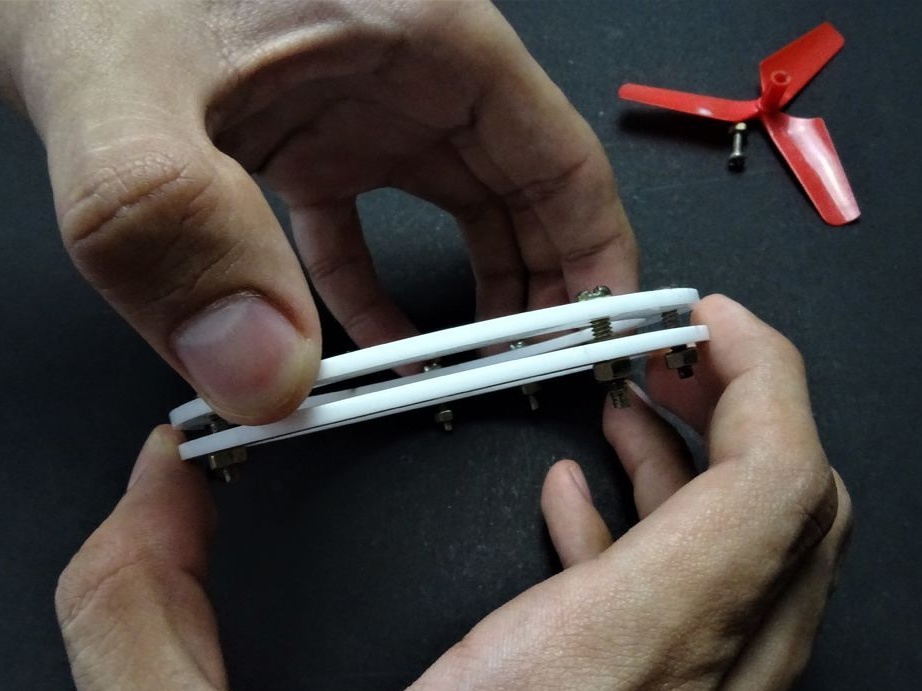
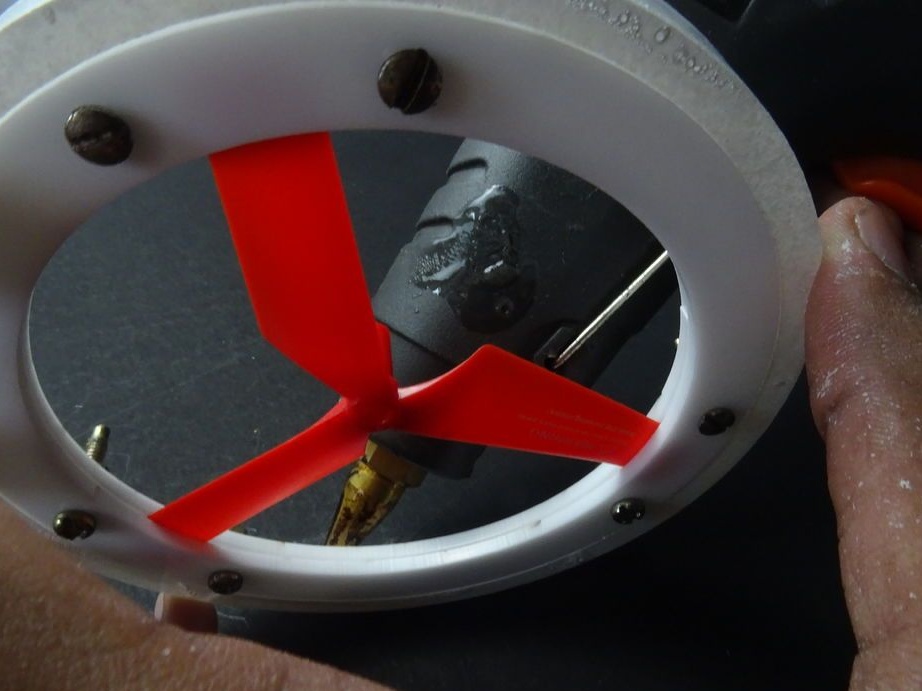
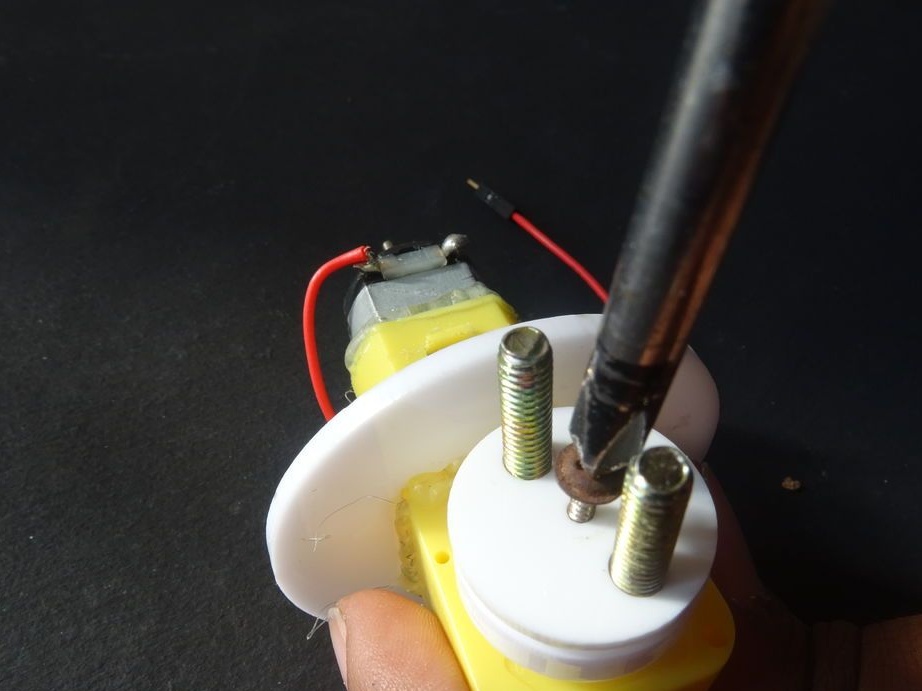
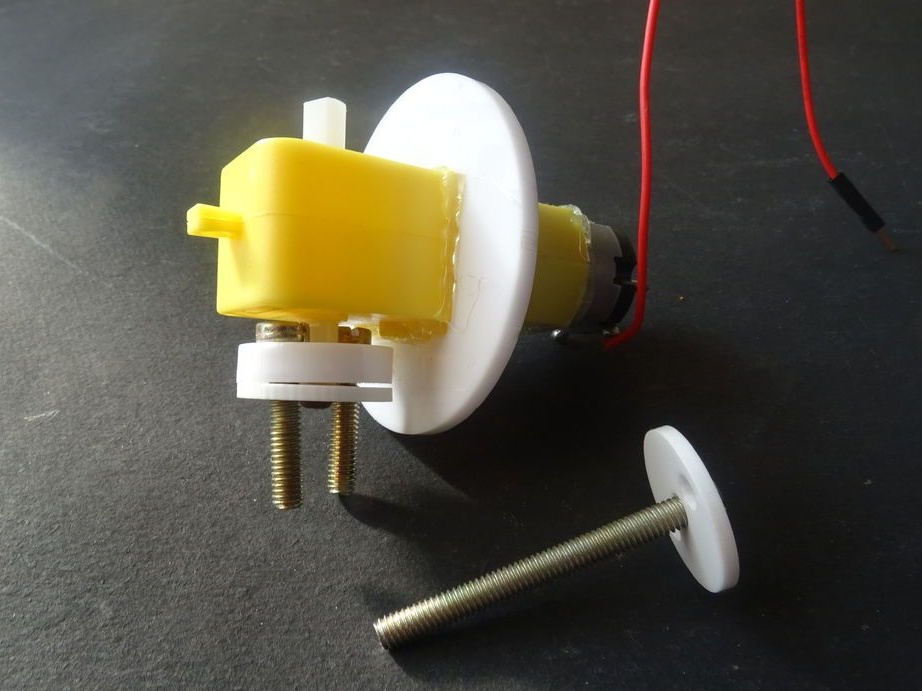
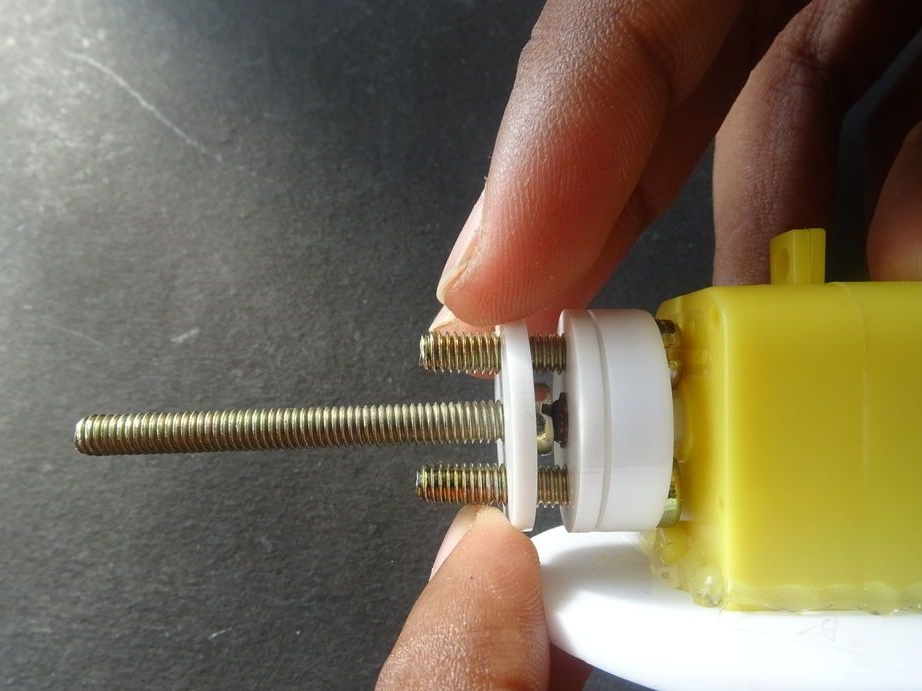
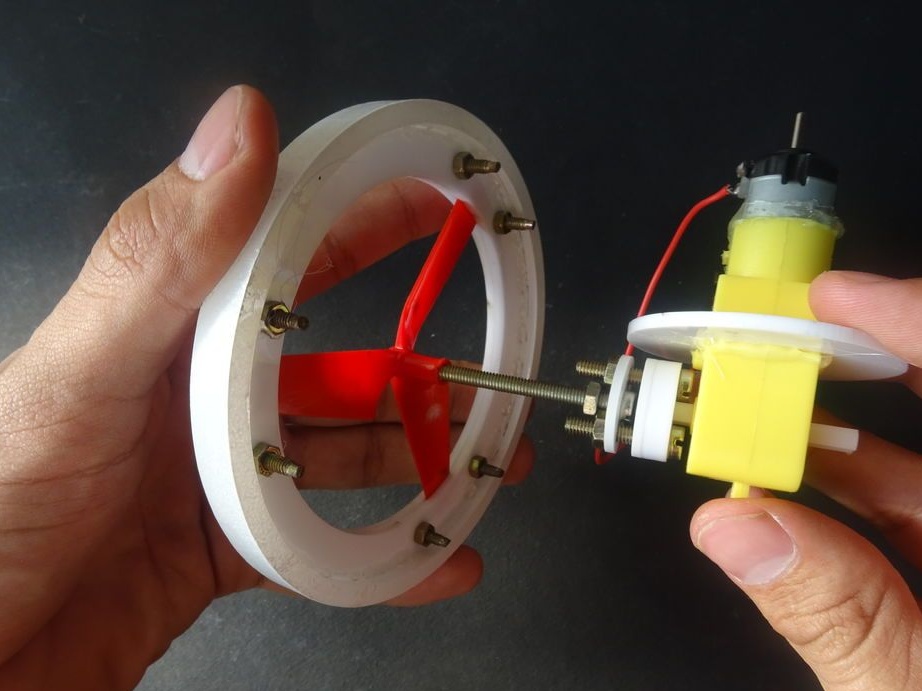
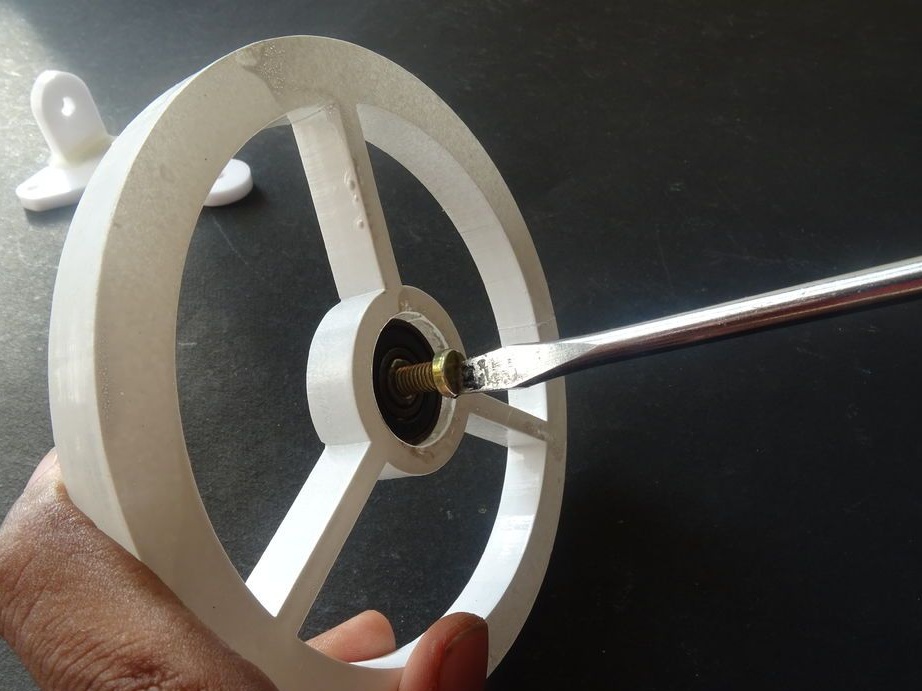
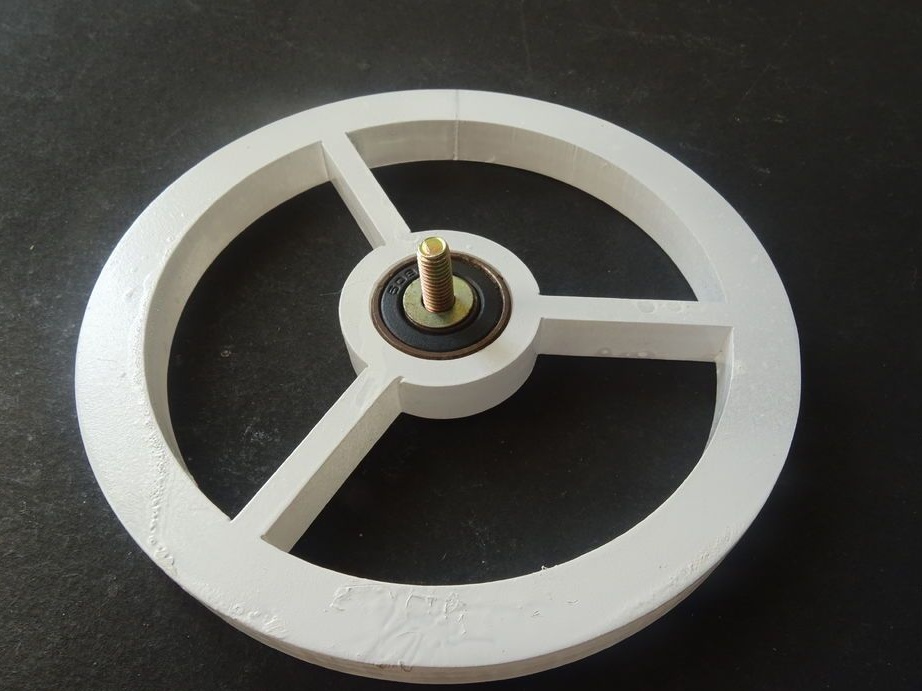
Trin elleve: Hjulmontering
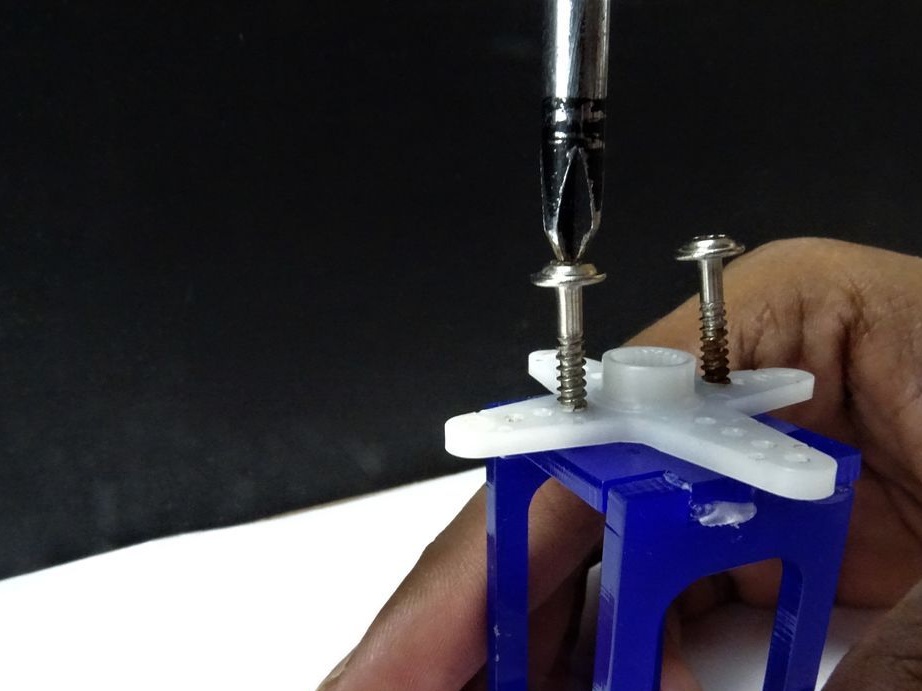
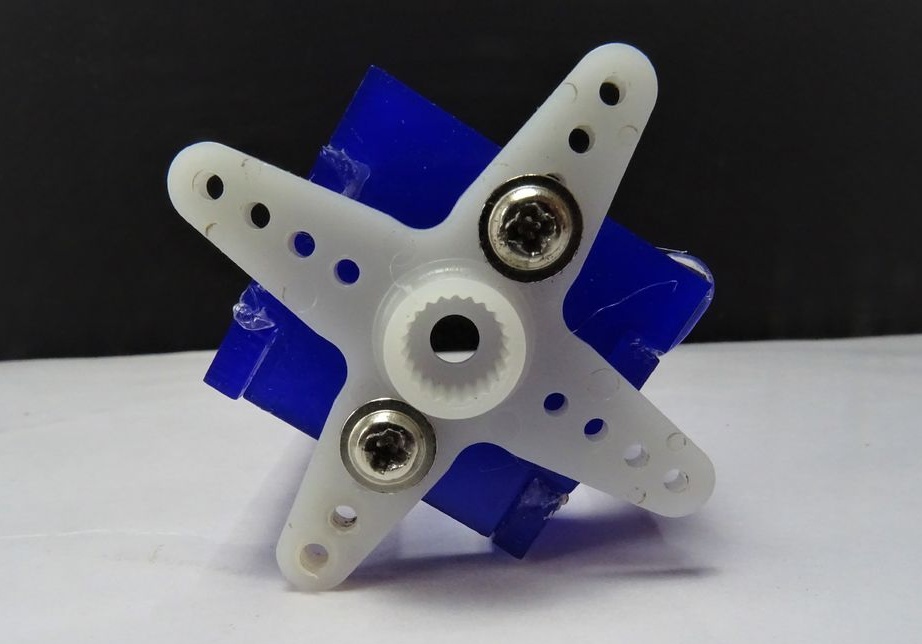
På boltene samles to fælge. Skruerne er ikke helt spændt.




Mellem skiverne installeres skruer og spænd skruerne. Når du installerer skruen, skal du bruge skabelonen til at centrere den.
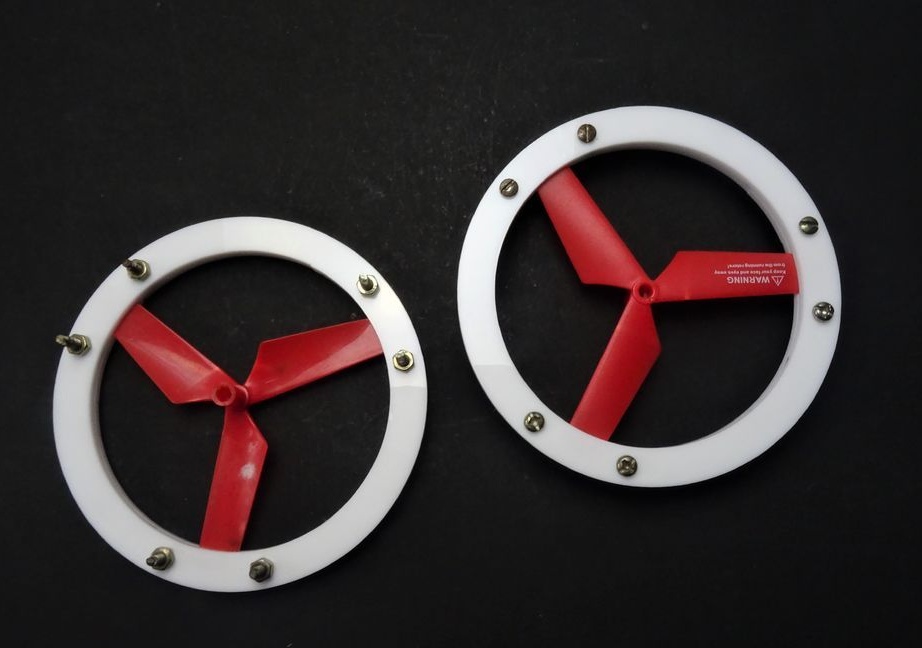
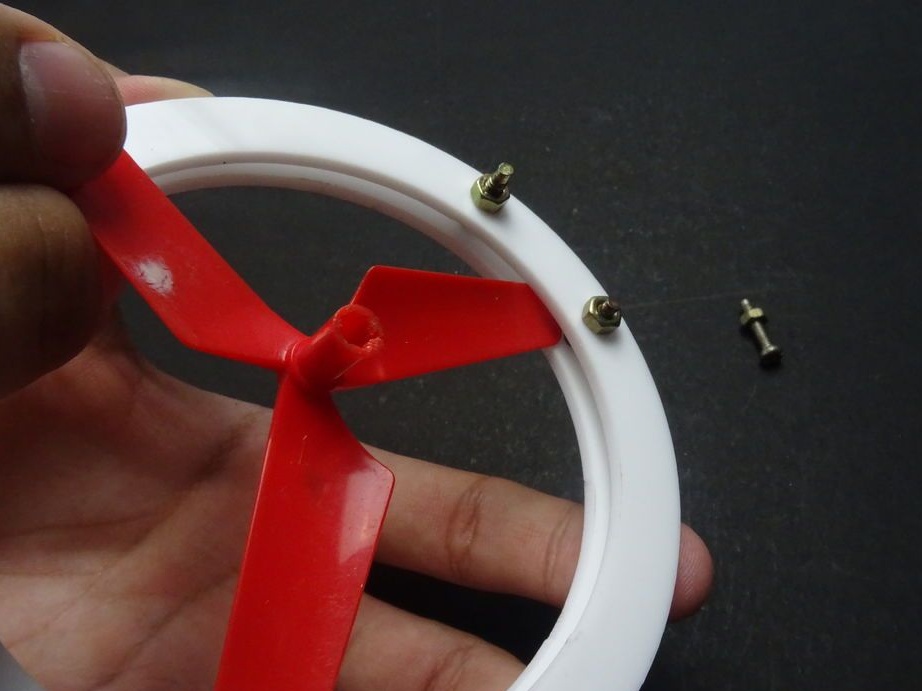
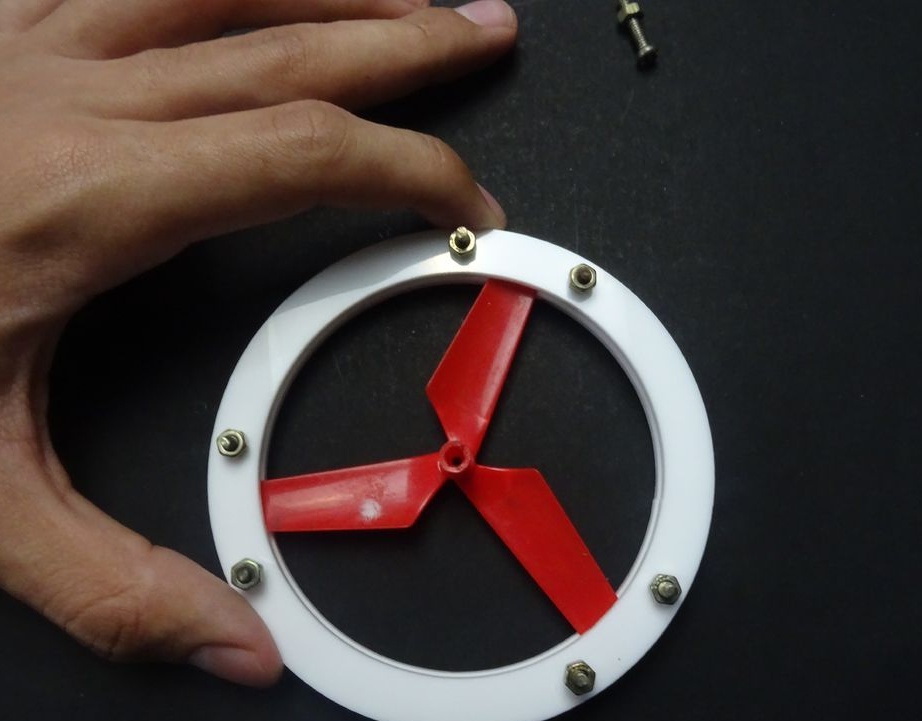

Indstiller den ydre kant af hjulet. Fælgen skal være i flugt med den interne disk.
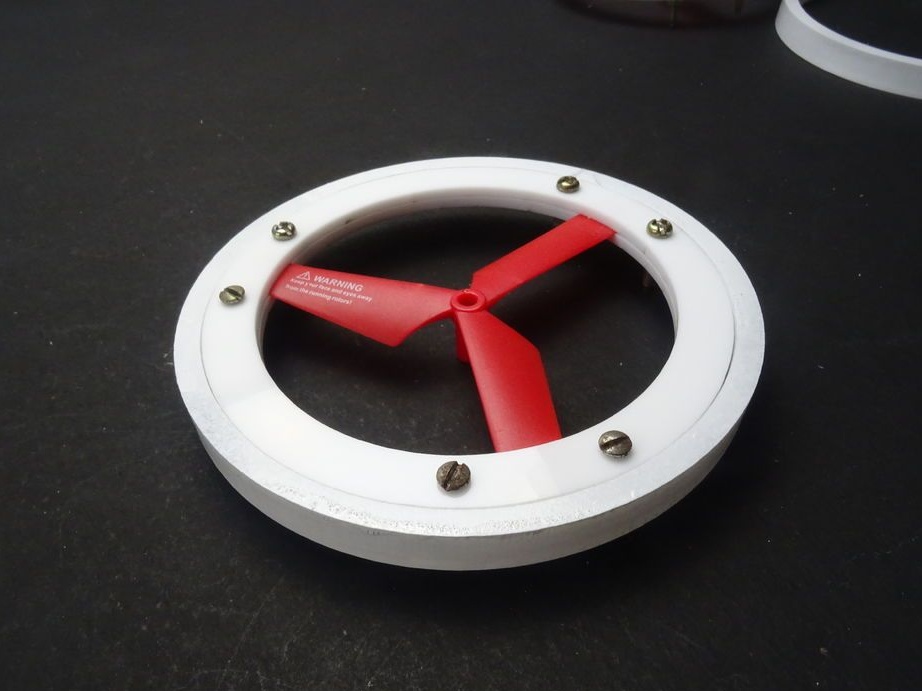

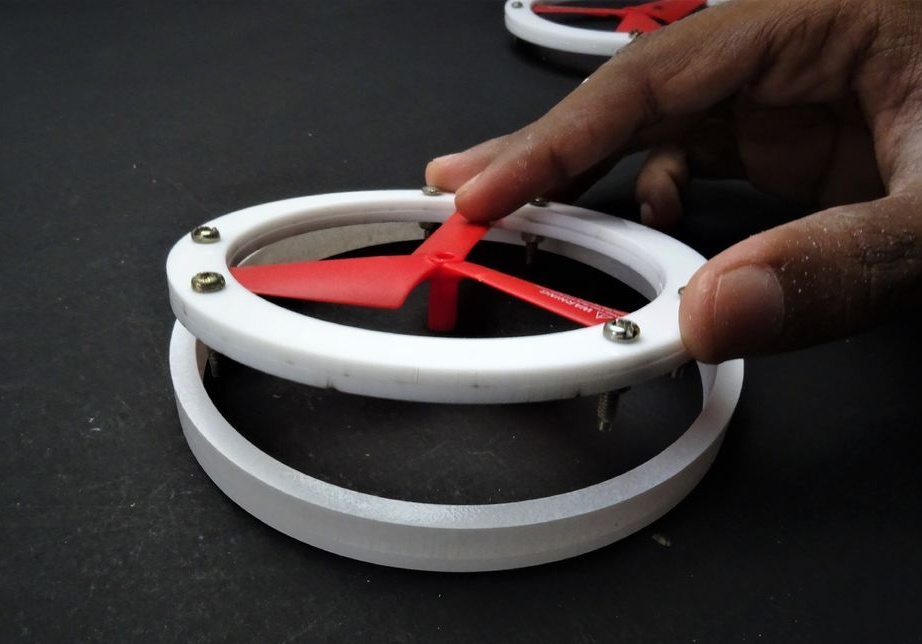
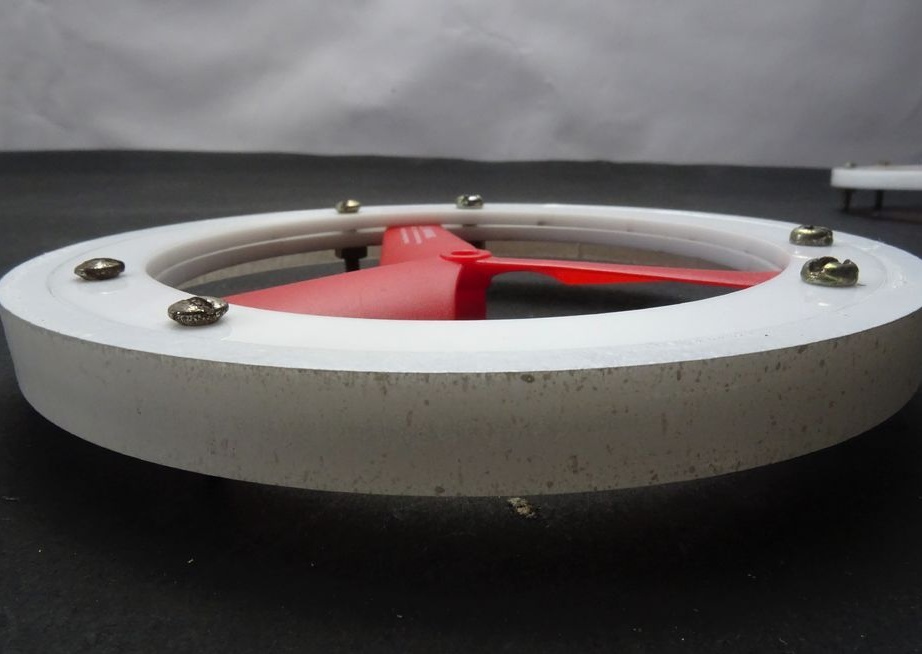

Påfør varm lim på forbindelsen.


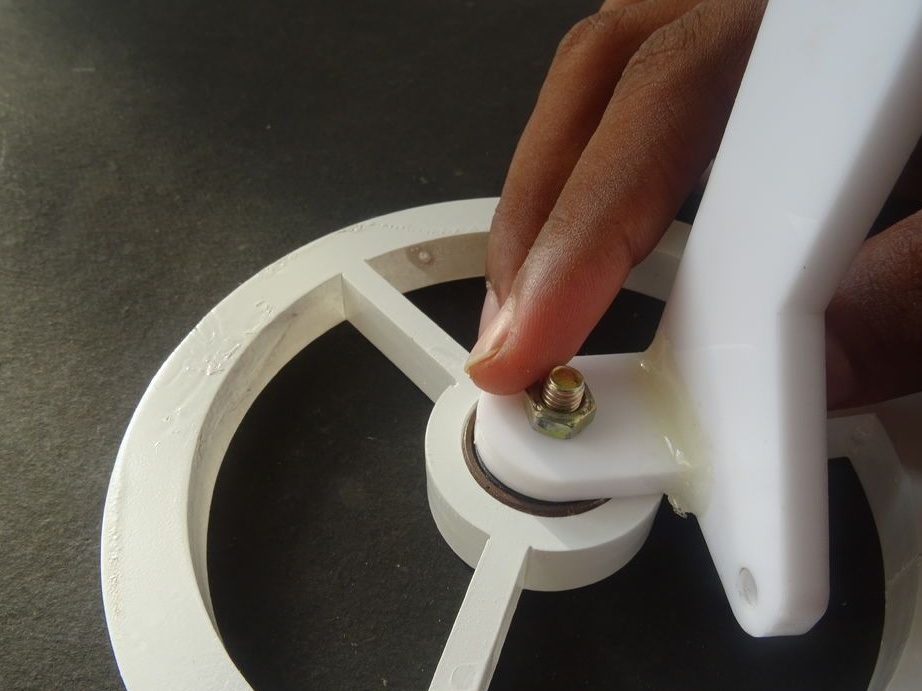
Samler nu forhjulene.
En møtrik i en passende størrelse tilstoppes i lejets indre løb. Presser lejer ind i forhjulene.
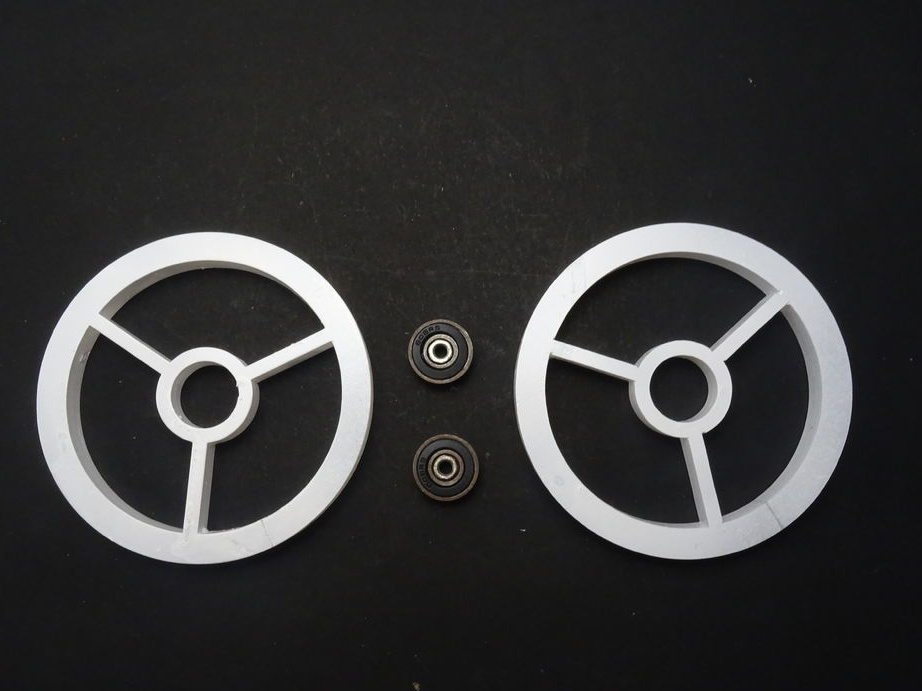



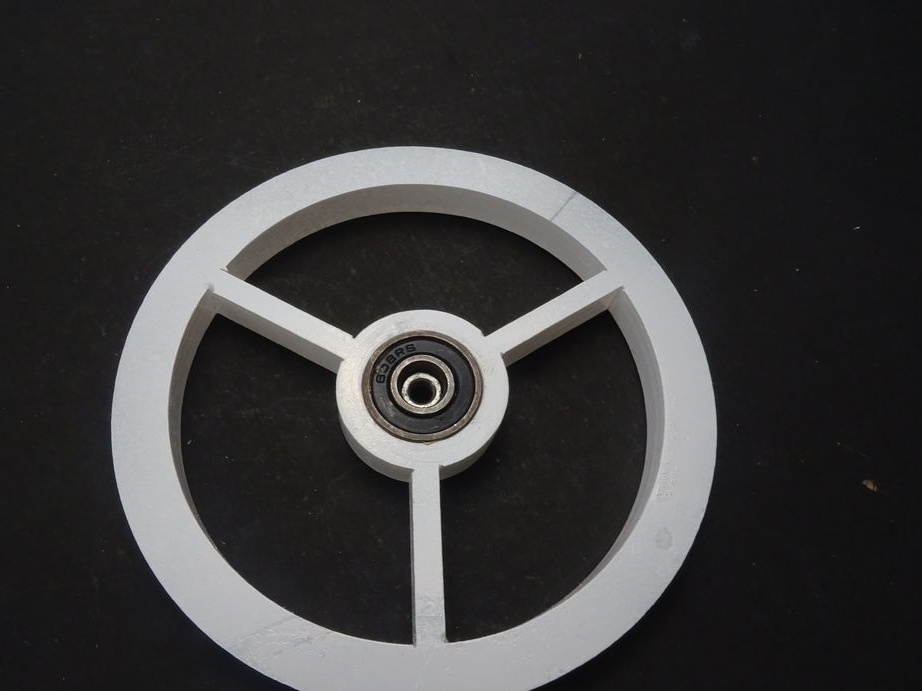
Hjulene er klar.

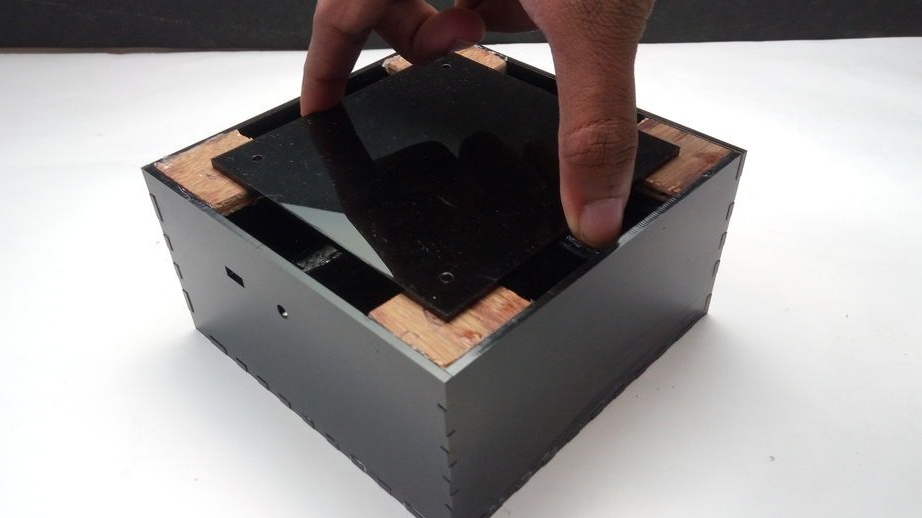
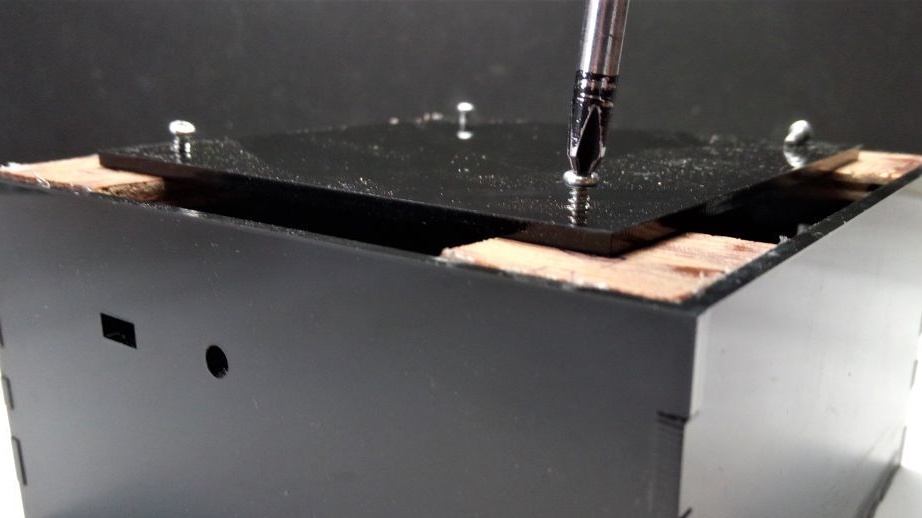
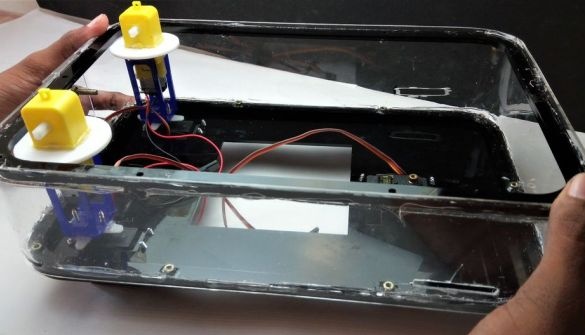
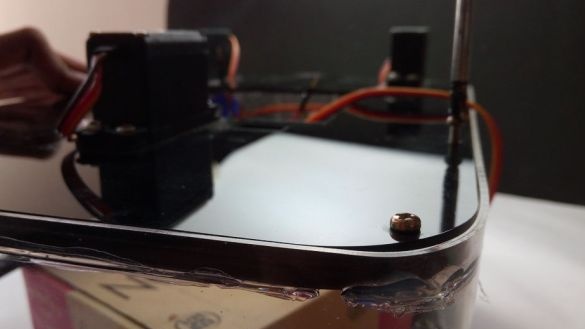
Trin tolv: Elektronisk kabinet
Limer huset til elektronikken.

Denne boks indeholder alt elektronisk komponenter, hvilket betyder, at det skal vandtætte så grundigt som muligt.


Fire firkanter klippes og limes fra brættet i kassens hjørner. Kasselåget monteres på dem.



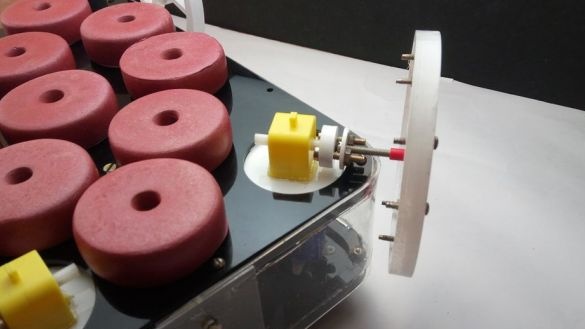
Trin 13: Hjulmontering
Nu skal du tilslutte hjulene og gearet med en kobling.





Skruer forhjulene til trækkraft.


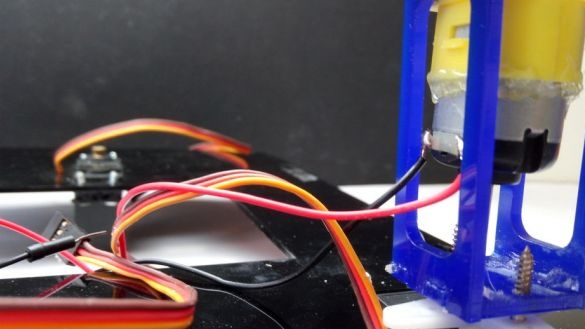
Trin fjorten: Tilslut elektronik
I henhold til ordningen installerer den elektriske dele.
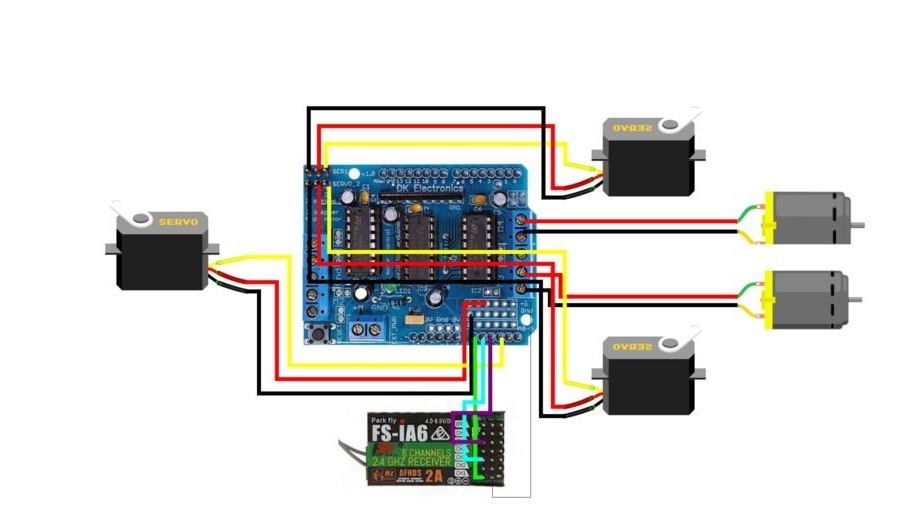

Ledningerne til venstre motor til M1, højre til M2. Tilslutter en motordriver. Tilslutter servoer. Installerer modtageren: gnd af modtageren til gnd Arduino; +5 V-modtager til +5 V Arduino; stift 3 til A0; stift 1 til Al; stift 5 til A2. Tilslutter batteriet.
Trin Femten: Download kode
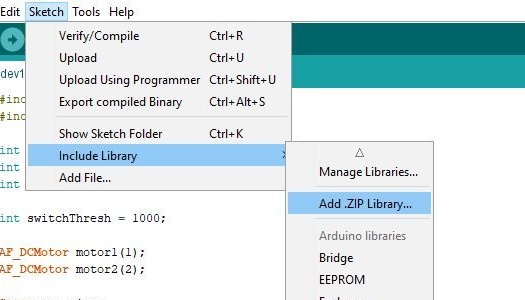
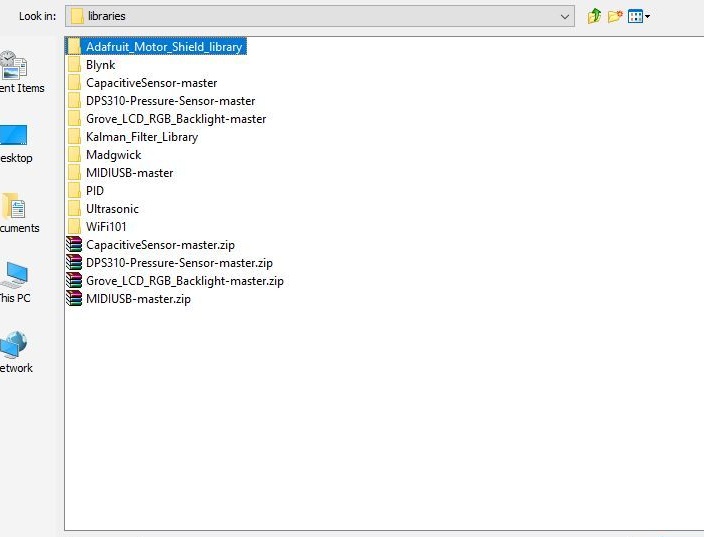
Først skal du downloade biblioteket.
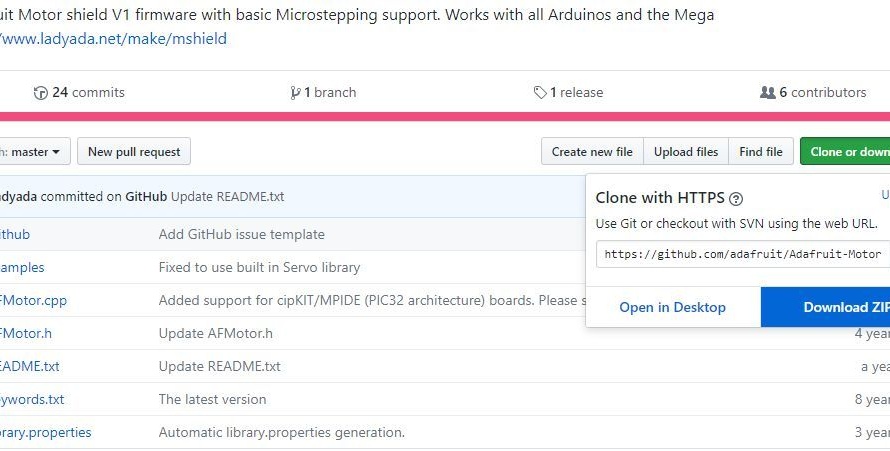
Download derefter koden. Ved ilægning skal batteriet frakobles.
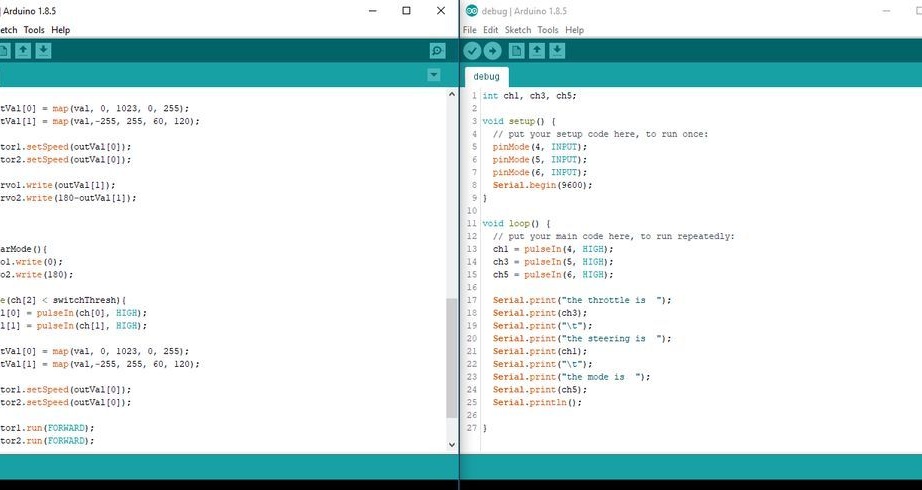
Download koden nedenfor.
amphibious_rover_code.ino
Efter download af koden kontrollerer den driften af motorer og drev.
Trin seksten: samling
Nu er det tid til at samle terrænkøretøjet.
[center[/ center]
Installerer servoer. Installerer gearmotorer.

Fastgør hjulene. Drej begge halvdele af kroppen.






Alt er klar, og nu kan du teste.