


Materialer og værktøjer til montering:
- roterende controller;
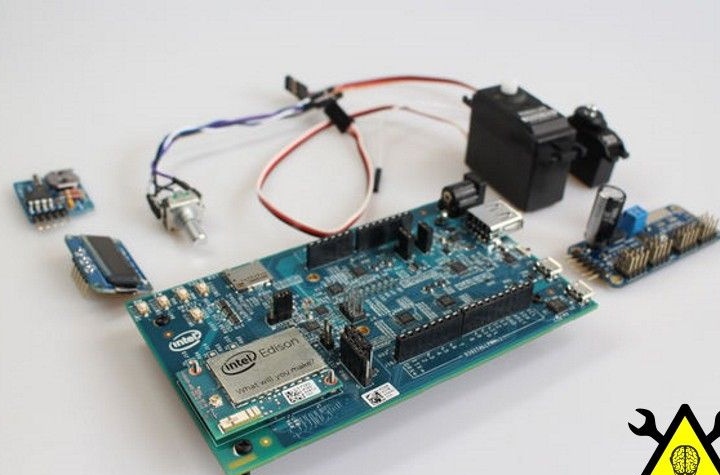
- Intel Edison med Arduino Breakout Board
- I2C PWM-driver;
- realtidsuropdeling
- mini I2C OLED;
- to servoer;
- Tre servoer med metaludstyr;
- to ledninger til et servodrev 30 cm langt;
- monteringsstik til stik;
- topositionskontakt;
- børste og tandpasta
- strømforsyning til 5V 3A;
- en plastsprøjte;
- møtrikker og skruer;
- møtrik og gevindstang;
- et stykke gennemsigtig akryl, der måler 61 cm x 61 cm x 3 mm;
- krydsfiner, der måler 91 cm x 61 cm x 6 mm;
- 3D printer.
Robotsamlingsproces:
Første trin. Mekanisk del
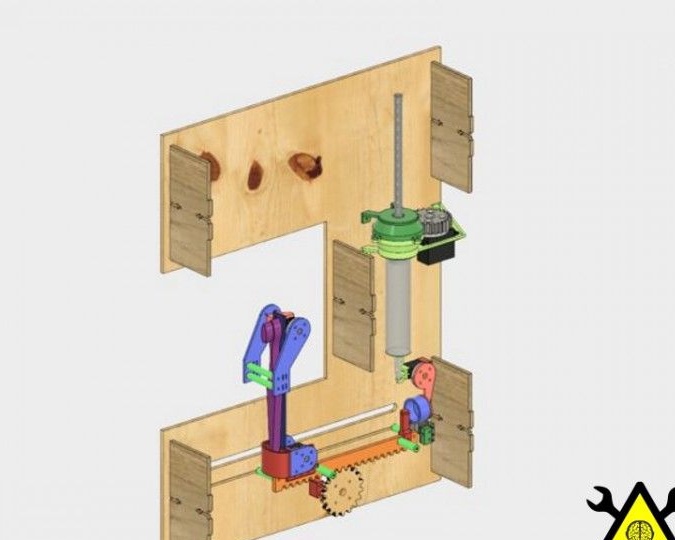
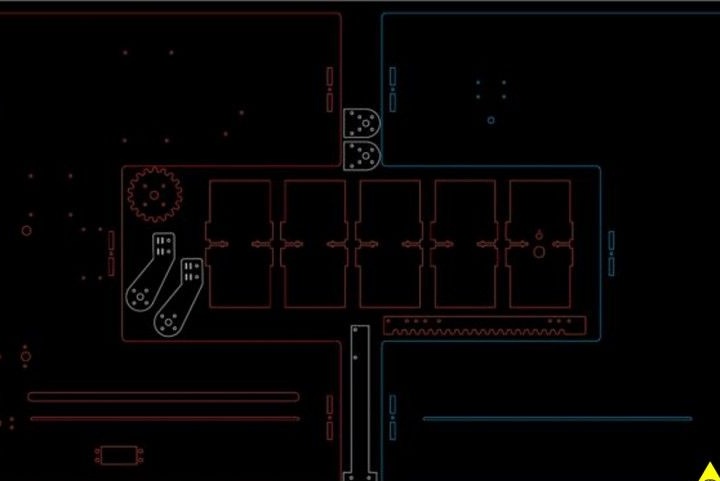
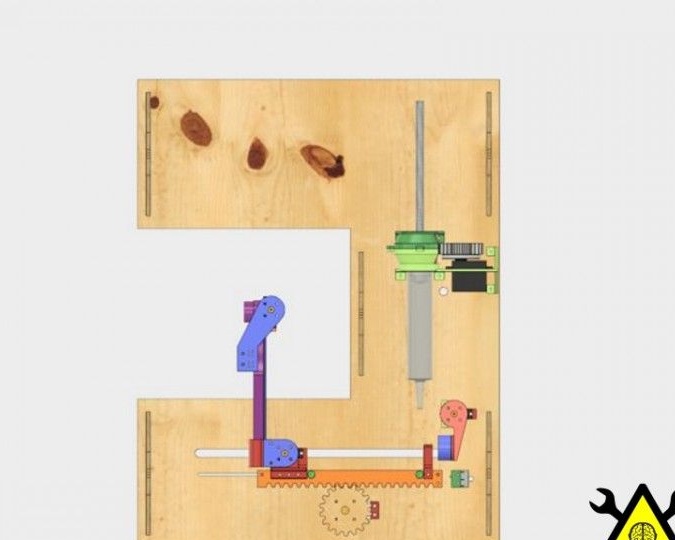
Enheden blev først modelleret ved hjælp af en kombination af Fusion 360 og Illustrator. I processen blev der skabt en hel teknologi, der inkluderer 3D-udskrivning samt laserskæring af metal. I alt kan systemet opdeles i fire hovedknudepunkter. Dette inkluderer en vogn, en tandbørsteholder, en hoveddel og en dispenser.
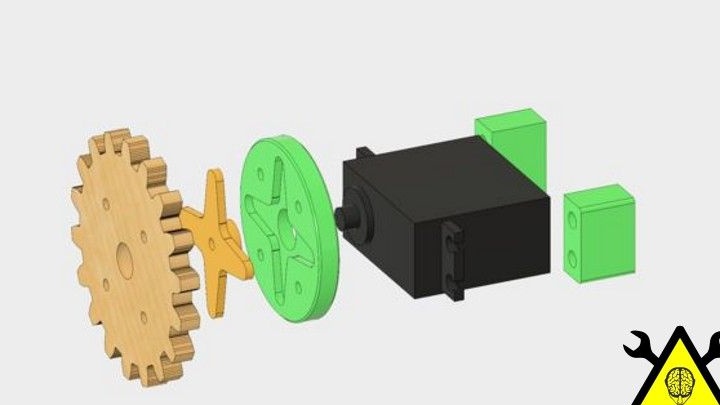
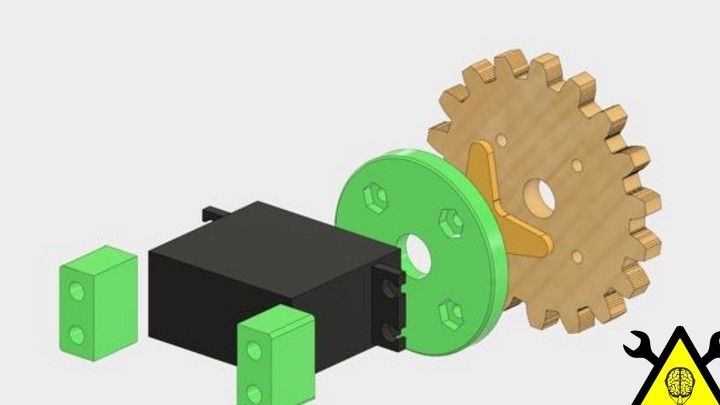
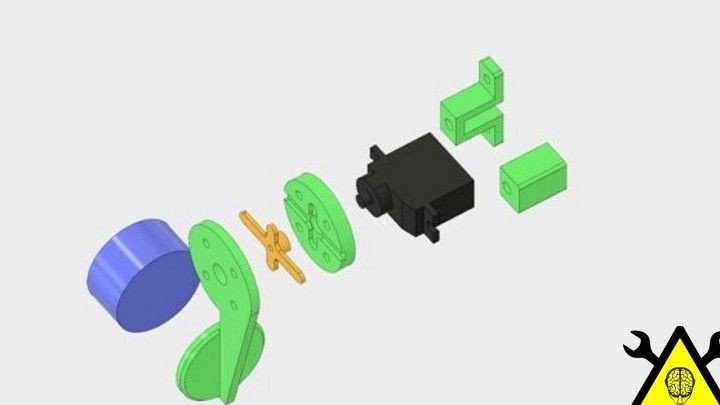
For at hjemmelavede produkter kunne bruges til bredere behov, blev det besluttet at modellere adaptere til standard- og mikroservoer. Disse adaptere har åbninger til fastgørelse af standardaksler samt plads til fire møtrikker på bagsiden. På grund af det faktum, at adapterne var designet til aksler, skal de fastgøres enten til pladerne eller til andre genstande.

Trin to Enhedens elektriske kredsløb
En 5V og 3A kilde bruges som strøm. Dette er nok til at drive en motor. Hvad angår hovedkortet, bruger det ca. 500 mA, og motordrevene, den originale LED og realtidsuret forbruger en lille mængde strøm.
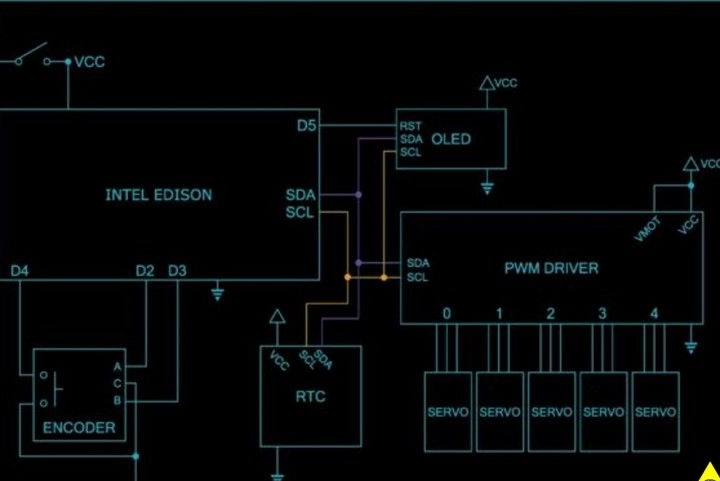
Intel Edison-processoren bruges som systemets hovedkontroller. På grund af adskillelsen af pladerne kan processoren let kommunikere med andre komponenter i elektronikken. Brættet opretter forbindelse til motoren, uret og skærmen.
For at styre de fem servoer bruges et PWM-kort. Motorenes styrke kan styres ved hjælp af en ekstern kilde, men forfatteren besluttede at binde Vmot til VCC-stiften.Takket være dette drives hele systemet af 5V.
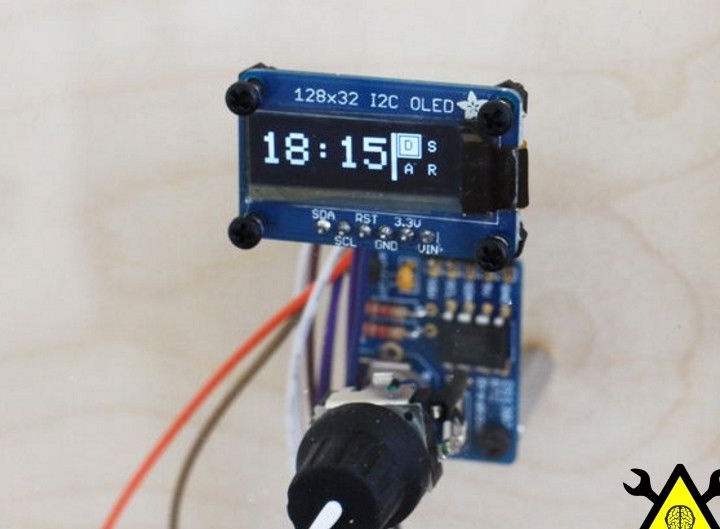
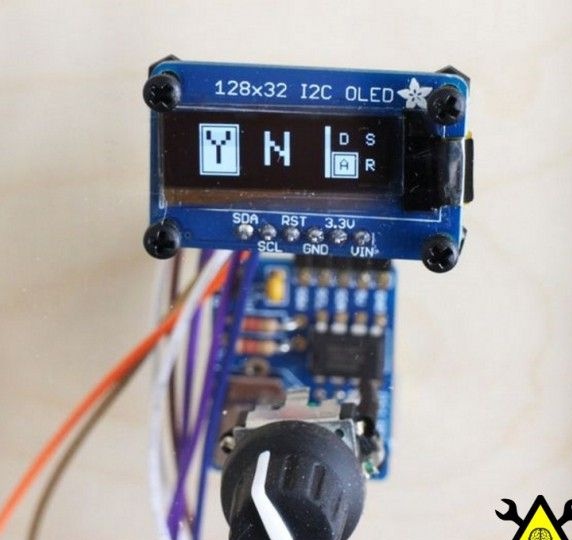
Så at enheden kan styres, bruges en lille skærm på 128 x 32. En roterende sensor fungerer som hovedbrugerindgang. Sensorens udgange er forbundet til processorens digitale kontakter.
Trin tre Kropsmontering
Bagdelen fungerer som understøttelse af etuiet, den er lavet af krydsfiner med en tykkelse på 6 mm. Fire skruer bruges til at fastgøre PWM og processor. Edison er monteret på forsiden og PWM på bagsiden.
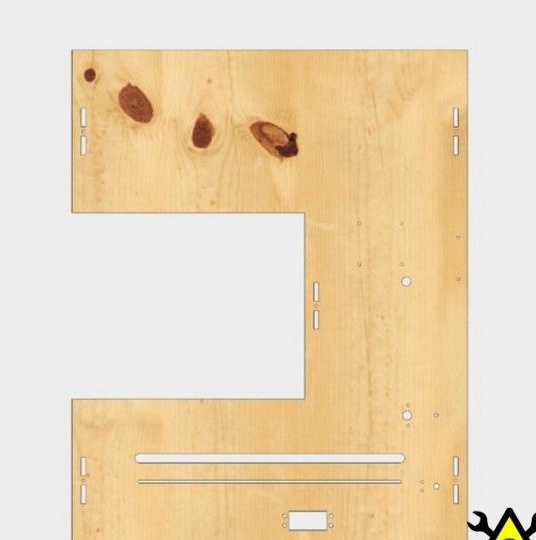
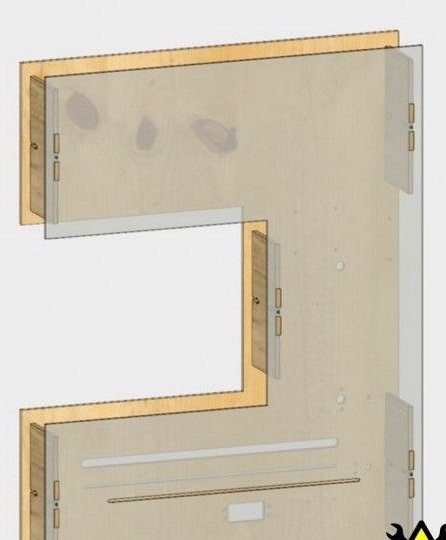
Fem afstandsplader bruges til at forbinde front- og bagpaneler. Afstandsstykker er fastgjort til pladerne med skruer og passende møtrikker. Pladerne er næsten symmetriske, men fremspringene på den ene kant er kortere, de strækker sig ikke fremad. Kontakten sammen med strømstikket er fastgjort til den nedre stiver.

Hvad angår frontpanelet, er det hovedsageligt nødvendigt for at beskytte enheden under drift. Fire skruer bruges til at fastgøre skærmen, den roterende sensor er også fastgjort med møtrikker.
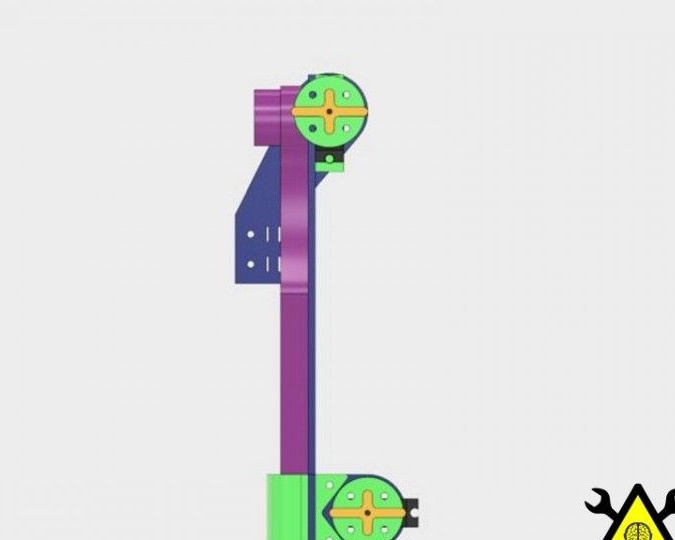
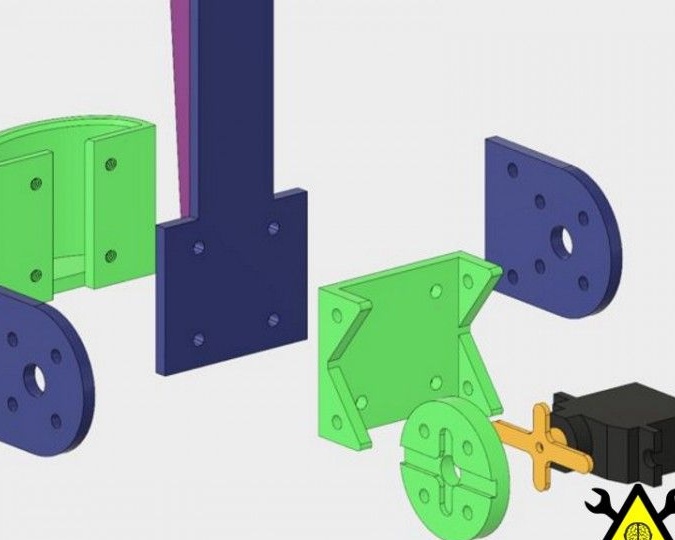
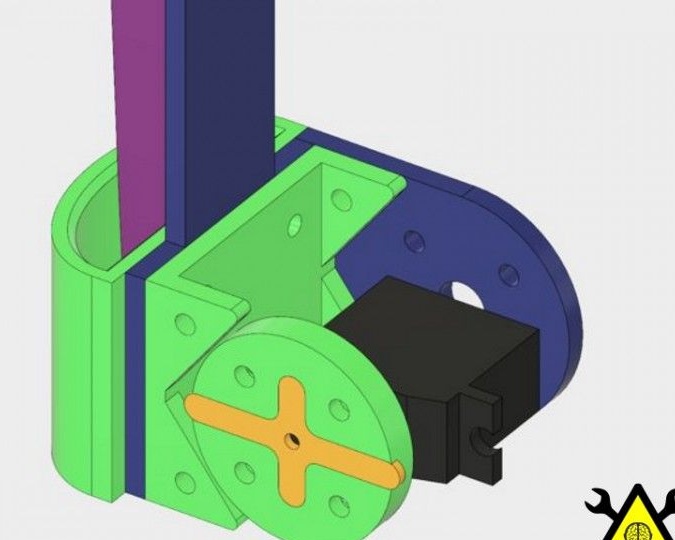
Trin fire Tandbørsteholder
Der er to servoer på tandbørsteholderen, der drives af komponenterne - basen og “hovedet”. På billedet kan du se elementerne i blåt og grønt. Det, der blev skåret med en laserskærer, er farvet blåt, og elementer, der er trykt på en 3D-printer, er farvet grønt.

Takket være hovedet falder tandbørsten ikke. Hænderne drives af et enkelt servodrev, de er fastgjort med to pakninger. En 3D-adapter og to skruer bruges til at fastgøre servomotoren til hovedpladen. Der er fire åbninger i pladen, gennem dem ved hjælp af sorte gummibånd er en tandbørste fastgjort.
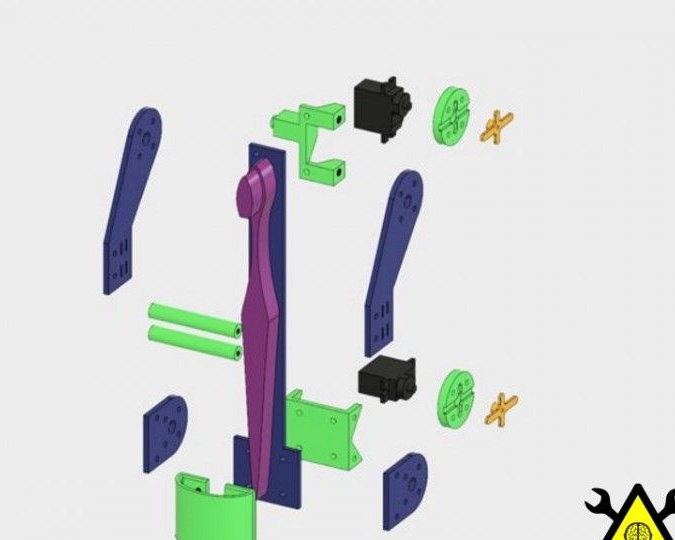
Basen er en lille 3D-kop, den holder børsten i at falde. Når tandbørsten er lagt i enheden, holder servodrevet det og drejer ned. Otte skruer bruges til at forbinde pladerne.


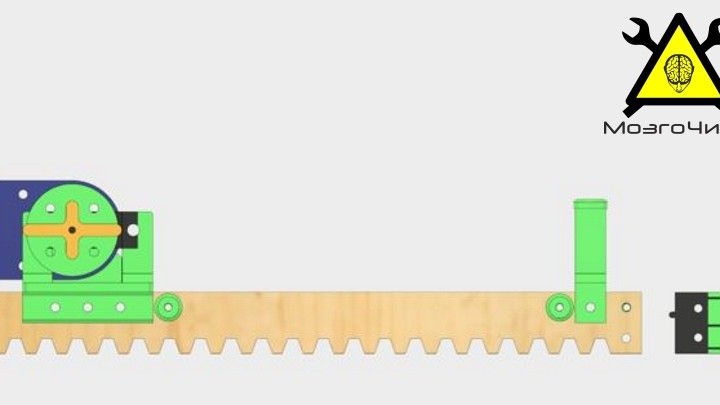
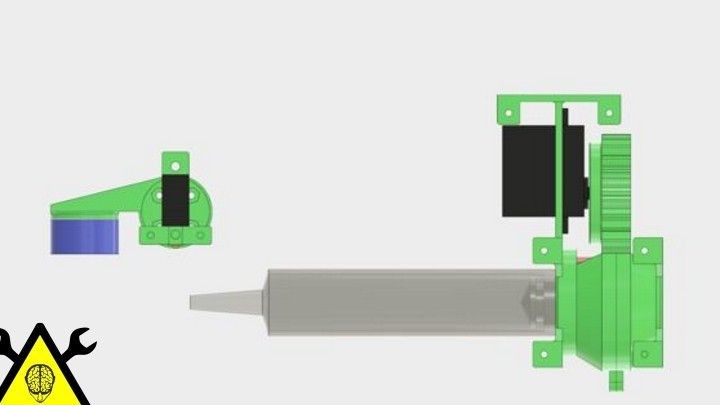
Trin Fem Skinnemontering
Rammen består af tre unikke dele, dette er en nakkestøtte, vogn og stivere. Ved hjælp af vognen er rammen holder fastgjort. Selve vognen er fastgjort med tre skruer. Hovedstøtten er nødvendig for at reducere belastningen på hovedservoholderen, den monteres yderligere på vognen på rammen.
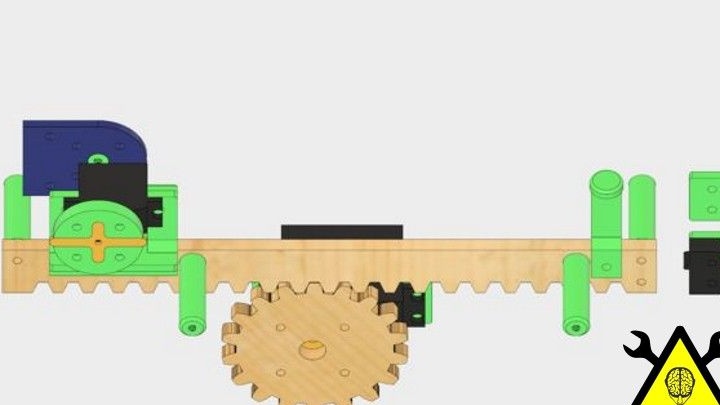
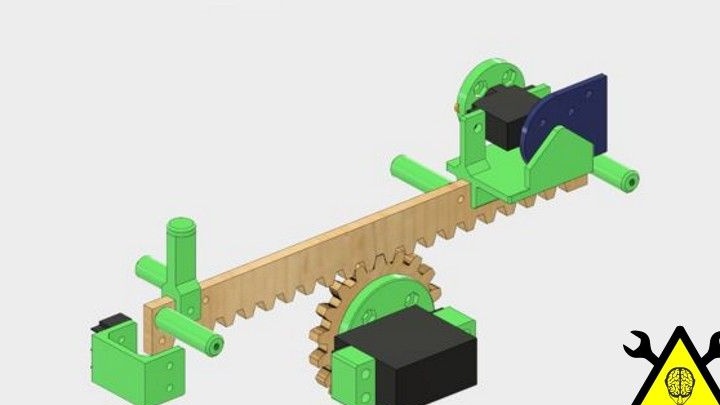
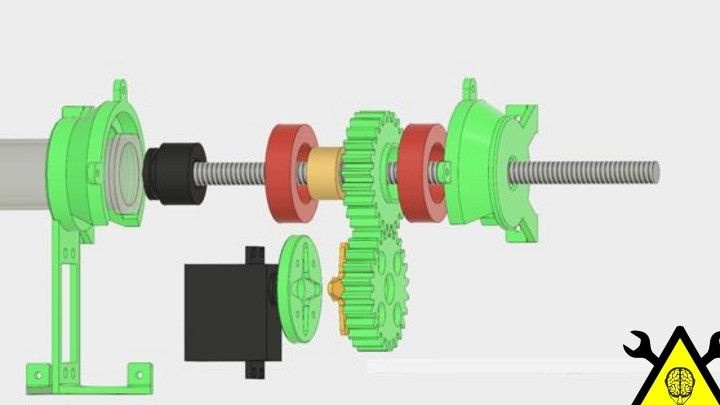
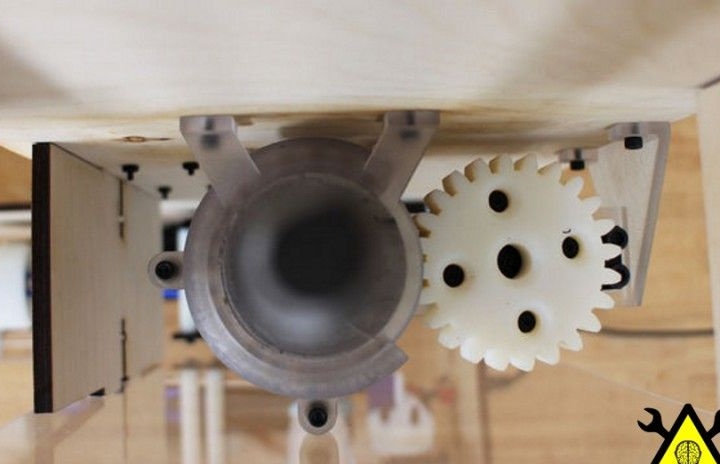
Gearet er monteret under rammen. Det er skåret ud af 6 mm tykt krydsfiner og fastgjort til en standard servo skaft. Selve servo-drevet er placeret lidt forskudt fra bundpladen, i forbindelse med dette er der identiske rektangulære stivere på den. Selve servoen er fastgjort til basen med fire skruer.
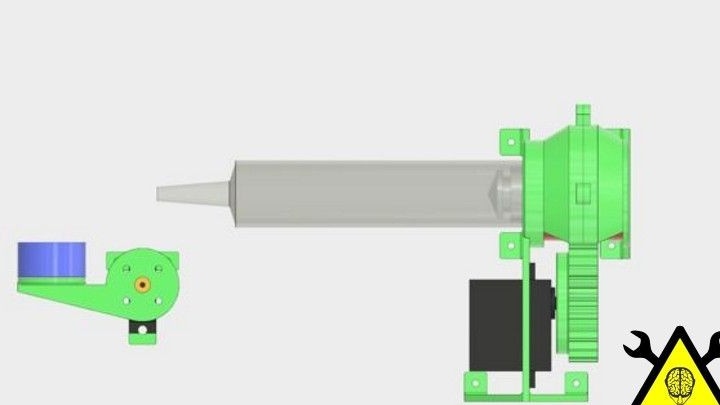
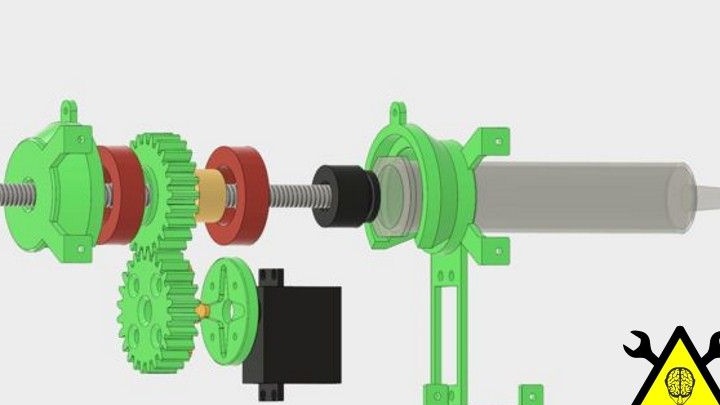
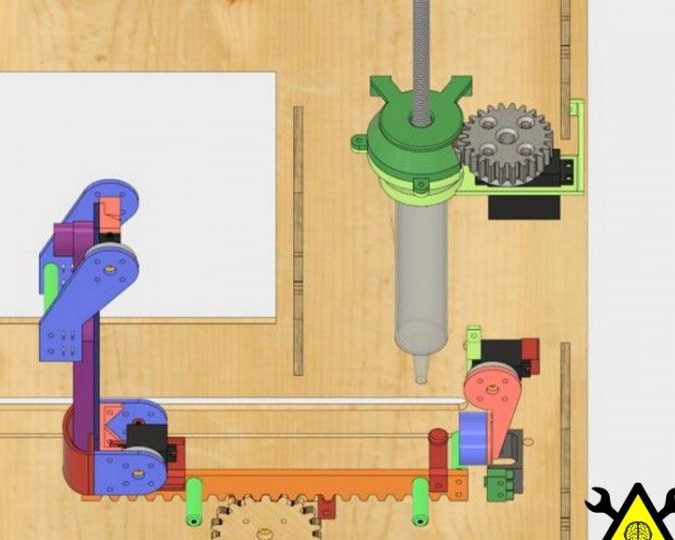
Trin seks Montering af dispenser
Den mest komplekse mekanisme i enheden er et lineært drev. Takket være ham forekommer doseringen af pastaen. Enhedens kerne er en gevindstang og en møtrik, ved hjælp af dette er røret komprimeret. Seks skruer bruges til at fastgøre drevet.
Syvende trin. software
I alt har programmet tre funktioner: indstilling af klokkeslæt, indstilling af "alarm" og også funktionen til at starte enheden.
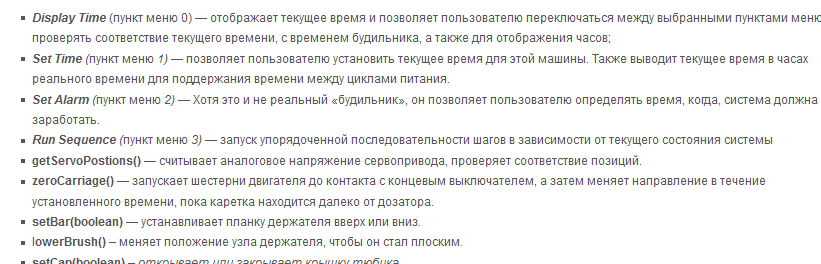
Det er alt efter, at enheden er blinket og konfigureret, er klar til brug.