
Materialer og værktøjer:
- mikrokontroller Arduino (i dette hjemmelavet produkt anvender Arduino Uno Rev 3);
- To servoer fra Parallax;
- joystick (også fra Parallax);
- printkort) lille);
- stik tilslutning;
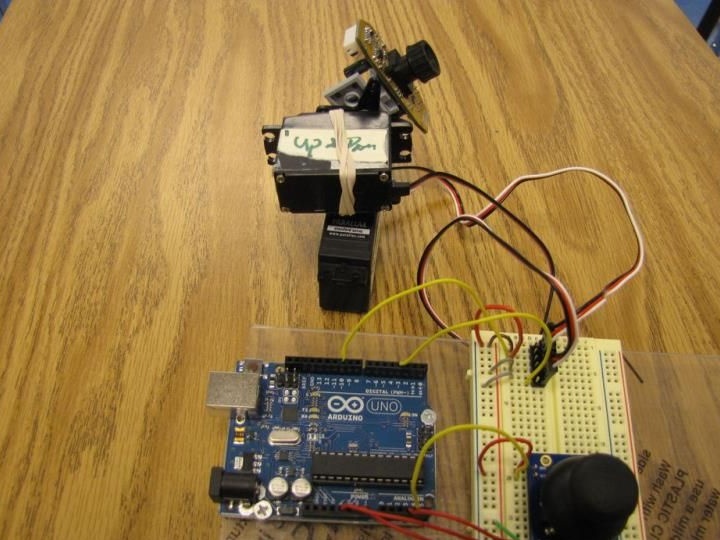
- En enhed til at spore bevægelse af servomotorer (et brudt webcam og legokuber blev brugt).
Hjemmelavet monteringsproces:
Første trin. Vi forbinder servomotorer
Den hjemmelavede monteringsproces begynder med tilslutning af servomotorer. For at samle et foreløbigt layout bruges et kredsløbskort. Derefter vil det være muligt at fremstille et separat skjold. På figuren kan du se, hvordan nøjagtigt alt er forbundet.
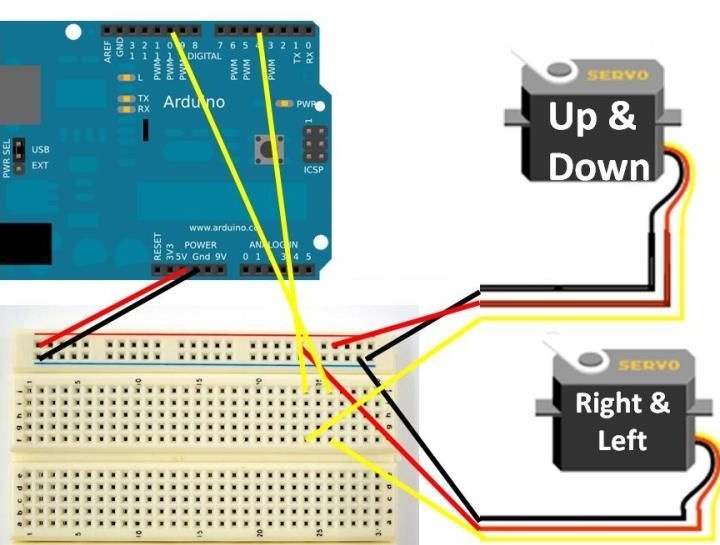
Det røde kabel er strømforsyningen, det sluttes til 5V-stiften på Arduino-controlleren.
Den sorte ledning er en minus (jord), den forbinder til Arduino-output kaldet GND.
Det gule kabel fra højre og venstre servomotor skal tilsluttes stift 11. På nogle modeller kan det være hvidt.
Et lignende gult Up & Down-kabel skal tilsluttes pin 4. Det kan også være hvidt på nogle motormodeller.
Det er vigtigt at huske, at de signalstik, der bruges til at styre motoren, kommer fra PWM-udgange.
Trin to Tilslut joysticket
Hvordan joysticket er tilsluttet kan ses på billedet. Til at begynde med kan ordningen virke temmelig kompliceret, men der er faktisk ikke noget kompliceret her. Som med motorer bruges her et ledningskort.
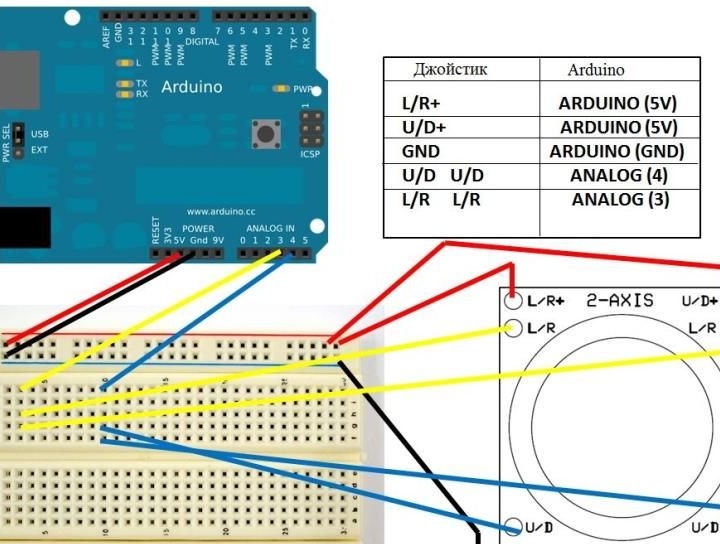
1. På joystick-modulet kan du finde output U / R + og L / R +. Gennem disse udgange er strøm tilsluttet. Derfor skal du anvende + 5V spænding fra den tilsvarende pin til Arduino.
2. Der er to stik under joysticket kaldet L / R og to U / D-stik. De skal tilsluttes de analoge udgange A3 og A4.
3. Nå, afslutningsvis, skal jorden på joysticket være forbundet til jorden på Arduino.
Efter montering skal forbindelsen dobbeltkontrolleres. Det er på grund af forbindelsesfejl, at der i de fleste tilfælde opstår problemer. Dette gælder især, når der bruges et kredsløbskort, og der er mange forbindelser på det.
Trin treSkitse til Arduino
Koden er meget enkel og indeholder detaljerede kommentarer. Ovenstående kode skal bare kopieres til Arduino IDE. Når koden er lagt, skal motorerne ikke bevæge sig. De skal kun begynde at bevæge sig, når der trykkes på knappen på joysticket.
Problemer, der kan opstå, og hvordan man løser dem
1. Hvis motorerne ikke tændes, skal du tjekke forbindelsen dobbelt. PWM-udgange bruges til at forbinde motorer, og analoge udgange bruges til at forbinde joysticks.
2. Det sker, at motorerne umiddelbart efter indlæsning af koden begynder at vibrere. Dette sker, hvis du forkert tilslutter stifterne U / D + L / R +. Forbindelsen skal kontrolleres omhyggeligt. For ikke at brænde brættet under testen, skal det kobles fra computeren.
3. Hvis alt genkontrolleres, men motorerne stadig ikke ønsker at arbejde, kan du prøve at tilslutte joysticket igen. Det skal fjernes fra kredsløbskortet og derefter installeres tilbage med en vis indsats. Joystick-stik skal gå godt ind i layoutet.
Hvis alt viste sig, kan du nu begynde at oprette eventuelle hjemmelavede ting med kontrol via joysticket. For eksempel kan du oprette en robot, der kan styres med en joystick og meget mere.