
Materialer og værktøjer til fremstilling:
- gevindskaft;
- krydsfiner;
- bolte og møtrikker;
- kuglelejer;
- stepmotorer som Nema 23;
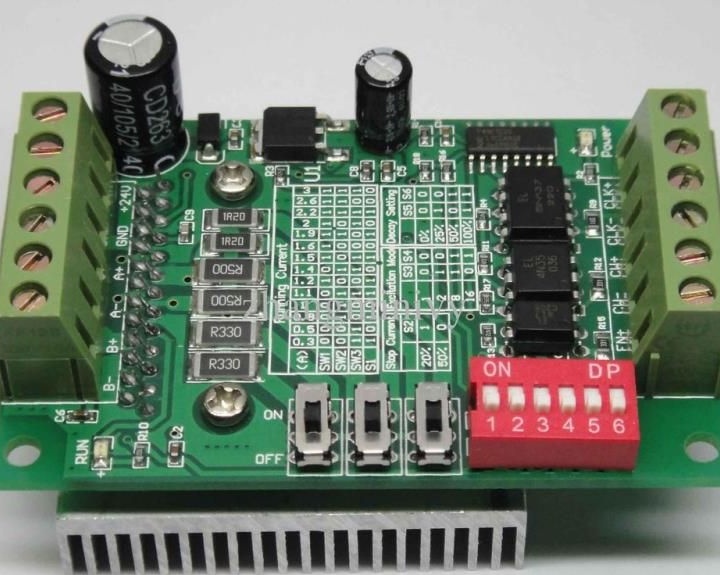
- Der er brug for TB6560-drivere til steppermotorer;
- installationen drives af en spænding på 24 V 15 A;
- Arduino UNO R3;
- metalbøsninger såvel som bøsninger lavet af nylon (muligt fra caprolon eller fluoroplast);
- ledninger.









Fremstillingsproces:
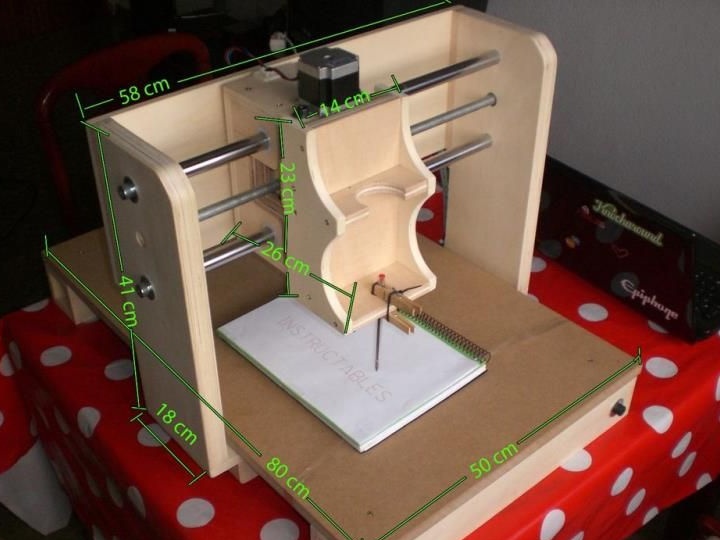
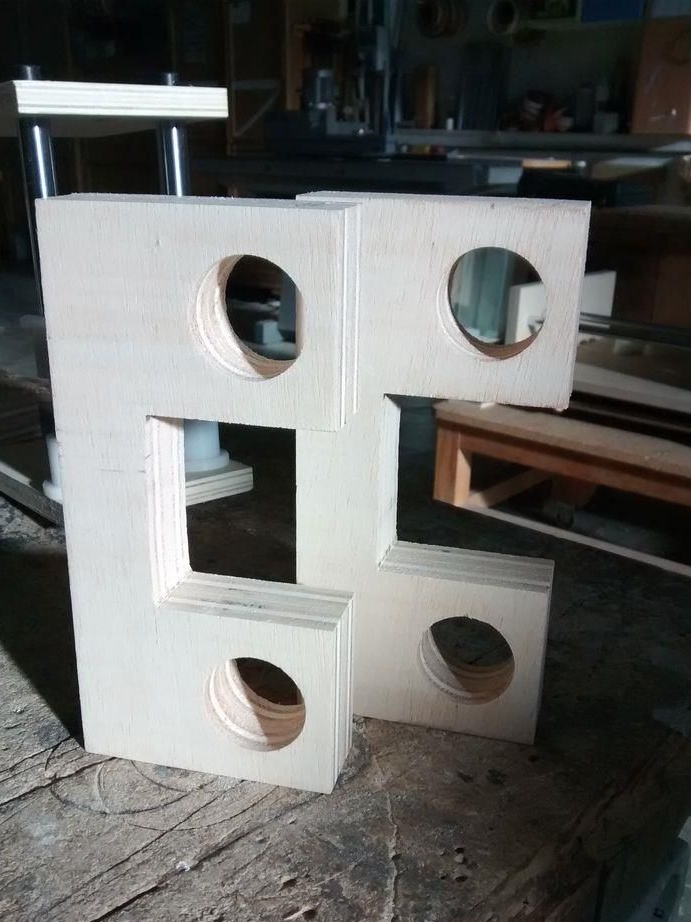
Første trin. Fremstilling af maskinens bund (X-akse)
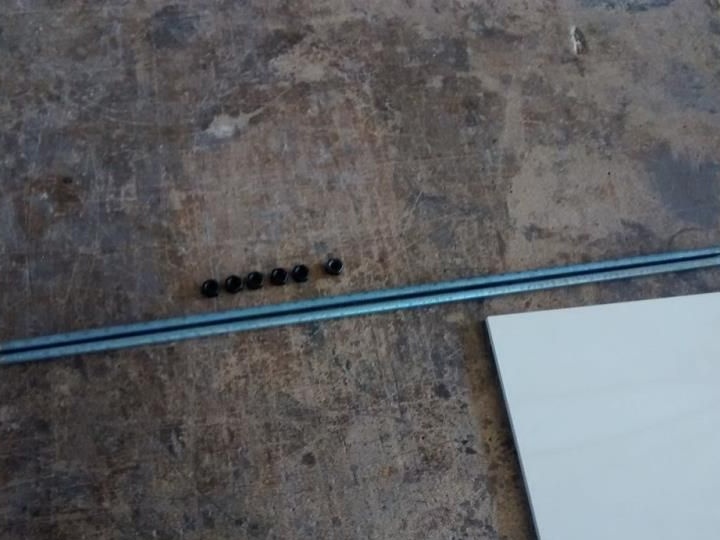
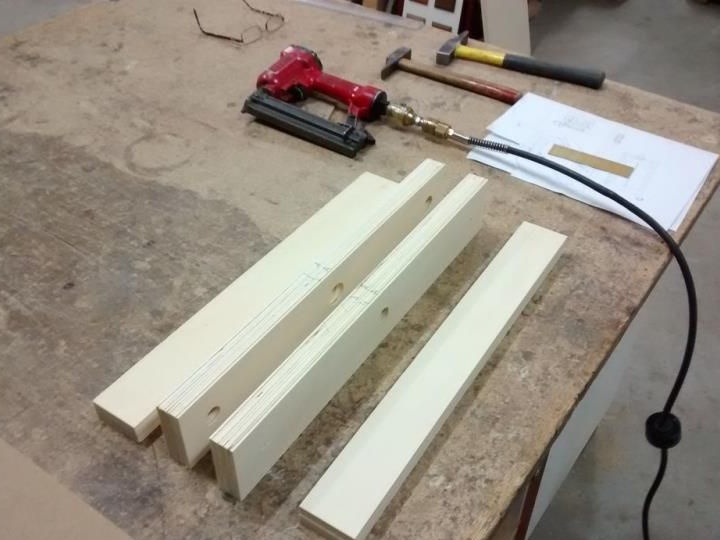
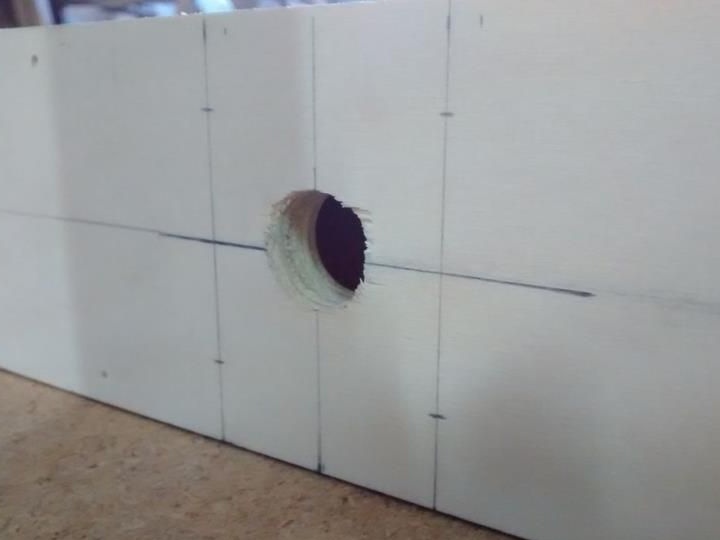
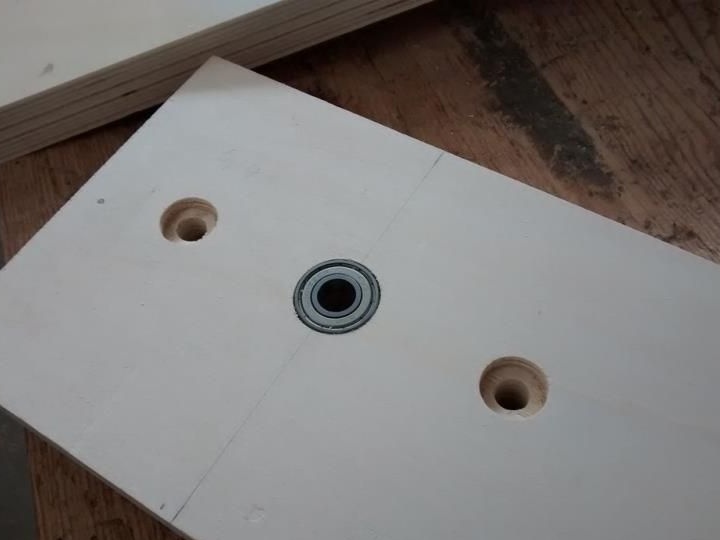
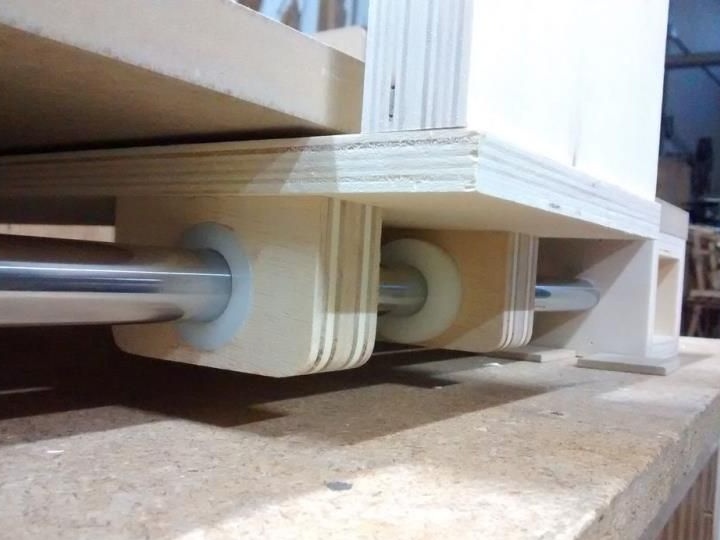
For at lave basen skal du have flere stænger, hvor du skal bore flere blinde og gennemgående huller. Installer derefter metalaksler, de fungerer som et drev til X-aksen.
Den gevindskårne skaft er installeret i midten, og to stålaksler er installeret på siderne som føringer. Når gevindskaftet roterer, bevæger vognen gevindskålebordet langs X-aksen.
Stangen skal være så tyk som muligt, da jo tungere base, desto mere pålidelige er maskinen under drift. Og dette forbedrer igen udførelsen under arbejdet.






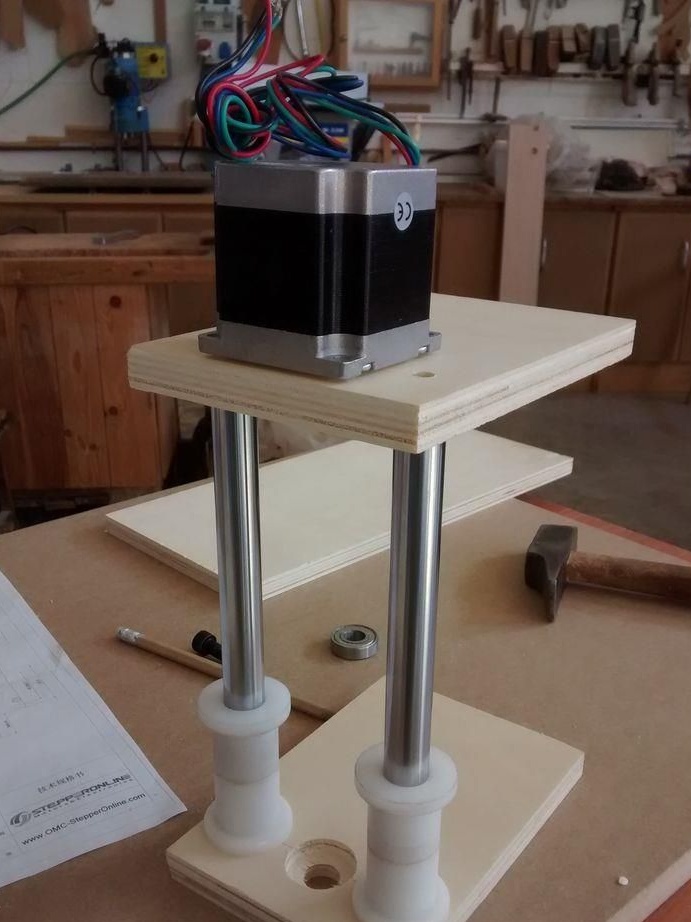
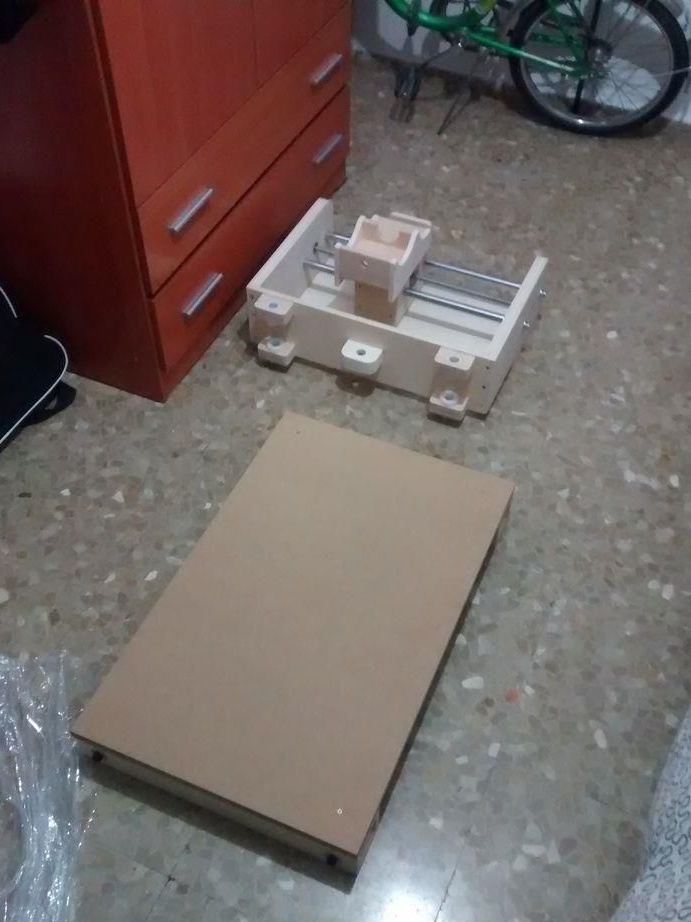
Trin to Opret Y-aksen
Portalstrukturen til Y-aksen oprettes på samme måde som basen X. Portalen er fastgjort på et bevægeligt bord, der bevæger sig langs X-aksen. Som dette kan du se på billedet.




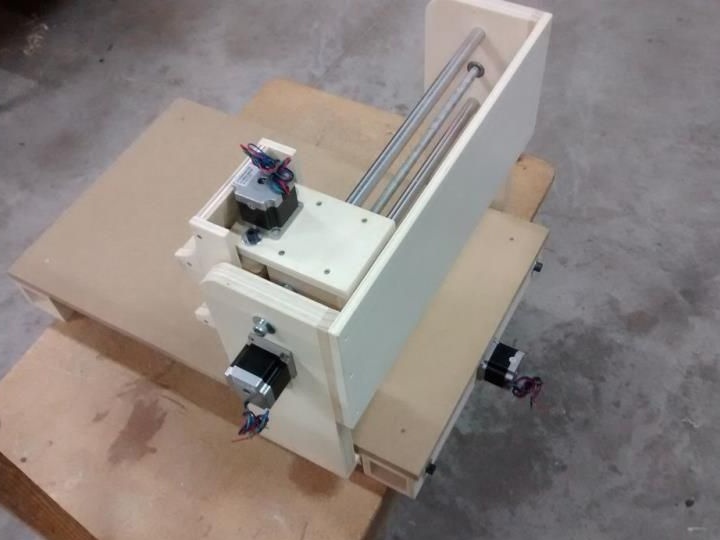
Trin tre Opret Z-aksen
Z-aksen oprettes nøjagtigt som de to foregående. På grund af denne akse er der en lodret bevægelse af arbejdslegemet, der mater værktøjet.











Trin fire Forsamling samling
Når alle elementerne allerede er fremstillet, kan maskinen yderligere samles, og denne proces er ikke kompliceret. For at forbinde elementerne bruges bolte med møtrikker. Maskinens dimensioner kan varieres, alt afhænger af personlige behov.Hvis nogle elementer under monteringsprocessen går i stykker, behøver du ikke at bruge lim til at reparere dem, er det bedst at genfremføre elementet. I dette tilfælde tilvejebringes elementernes nødvendige stivhed.


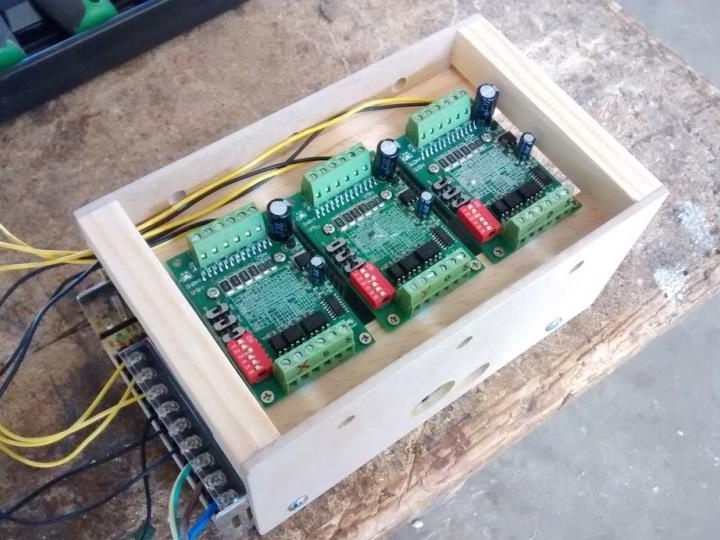
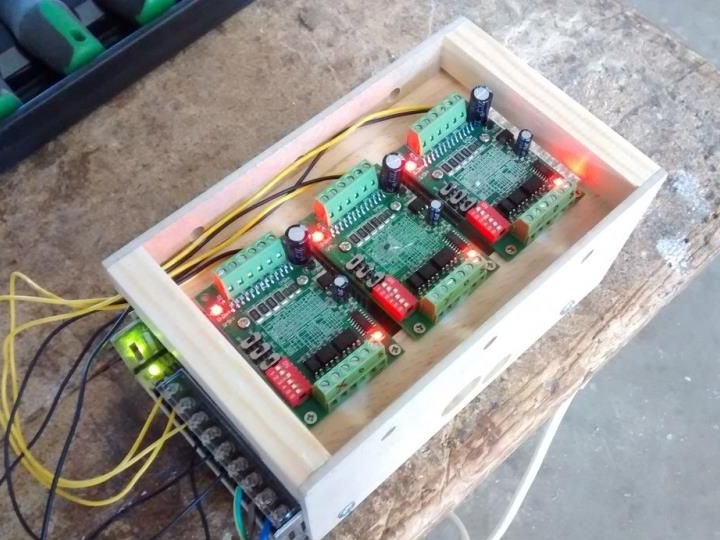
Trin Fem Den elektroniske del af enheden
Når den mekaniske del er samlet, kan du gå videre til processen med at tilslutte elektronikken. Du skal tilslutte Arduino med drivere og trinmotorer. Hver driver har brug for en strømkilde for at arbejde. Forfatteren brugte en 24 V 15 A. strømforsyning. Hvad angår chaufføren, er den allerede valgt individuelt afhængigt af motoreffekten. Motorspoler og deres poler er angivet med bogstaverne A +, A-, B +, B-.

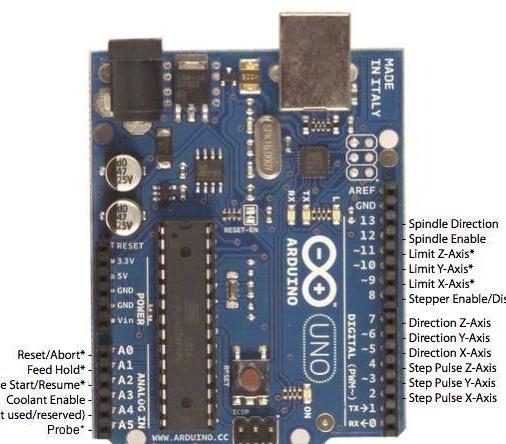



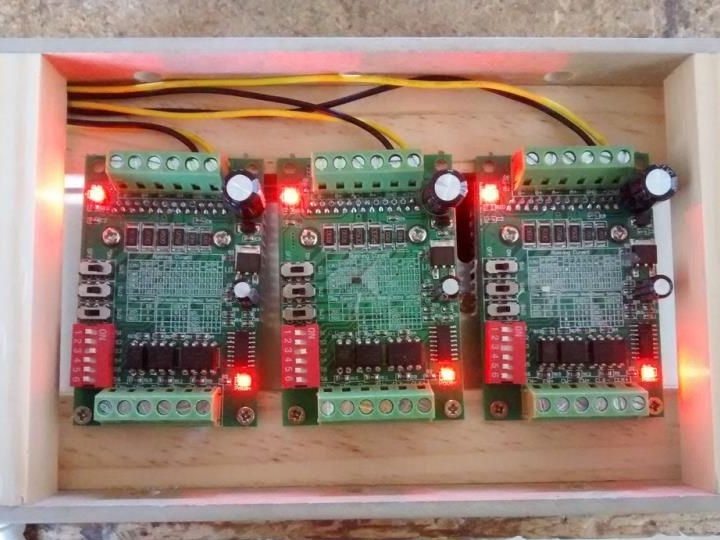

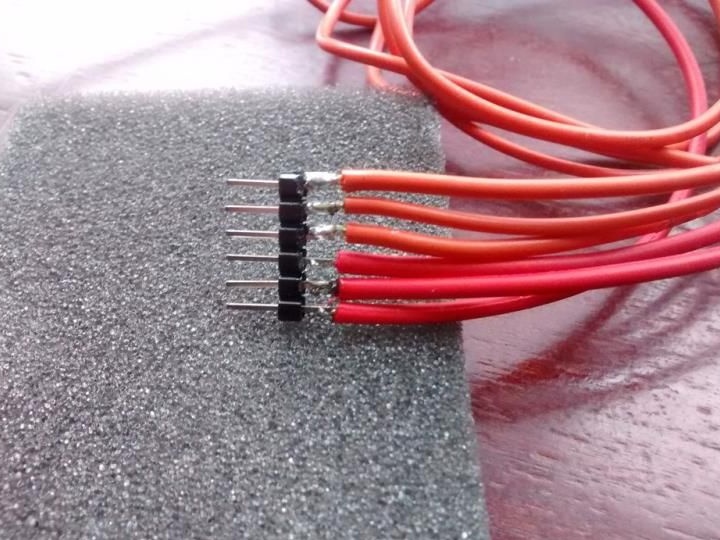
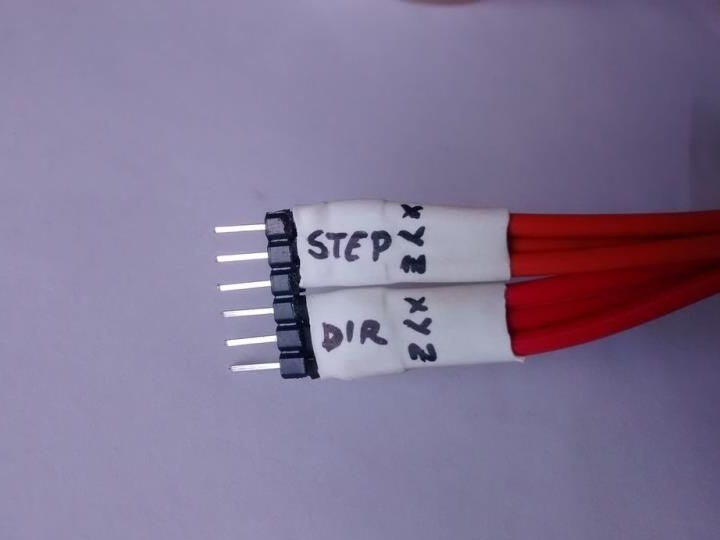

CLK + -udgangen skal tilsluttes stiftnålen på Arduino. CW + -stiften skal være tilsluttet retningsnålen. Nå, CLK- og CW skal tilsluttes GND-stiften. Kontakter EN + EN- bruges ikke.
Trin seks Softwaredelen af enheden
Det næste trin er at downloade den software, der kontrollerer maskinen. Processen er ikke kompliceret, du skal downloade koden ved hjælp af XLoader-programmet på Arduino-tavlen. Derefter skal du åbne GCodeSender for at forbinde Arduino-tavlen til en personlig computer. Herefter er tavlen klar til at styre CNC-maskinen.
Det er alt, maskinen er klar, du kan teste den i praksis. For at indstille de nødvendige parametre til behandling af objektet skal du bruge alle tegninger fra CAD-programmet. Ved hjælp af CAM-programmet genereres derefter G-koden. Til disse formål er det praktisk at bruge MasterCam X7-programmet. Det har allerede både CAD og CAM.