

Robotten DIY vil være et fantastisk legetøj til børn, også med det kan du lege familie eller venner. Essensen af roboten er som følger. Det er en kasse med en switch. Så snart nogen klikker på kontakten på kassen, begynder en dør at åbnes, hvorfra hånden kommer ud og sætter kontakten tilbage til sin oprindelige tilstand. På trods af robotens ydre enkelhed ser faktisk alt dette ret morsomt ud.
Grundlaget for at oprette en robot er et kredsløb Arduino. Der er også nogle mekaniske elementer, der vil blive diskuteret nedenfor. Lad os overveje mere detaljeret, hvordan kan gør det selv saml en sådan robot.
Materialer og værktøjer til fremstilling:
- Arduino board, hvilket som helst med PWM-output vil gøre;
- servomotorer, to stykker (egnet modellen Futaba - S3003, kraften i en sådan motor er nok til at åbne døren, enheden producerer op til 3,2 kg / cm kraft);
- batterier;
- switch type SPST eller SPTT;
- en switch til kontrol af batteristrøm;
- du har brug for en knap for at genstarte Arduino;
- ledninger, jumpere og andre små ting.

Derudover har du brug for en gearkasse (velegnet til radiostyrede biler), et bord til en elektrisk motor kaldet Arduino motorskærm, en RC servomotor. Disse komponenter er nødvendige for at få boksen til at bevæge sig, som forfatteren.
For at reducere støjniveauet under betjening af enheden er der behov for en elektrolytisk type kondensator med en nominel værdi på 10 mF, en 10K modstand og en 74HC04 inverter.
Robotens fremstillingsproces:
Første trin. Hvordan man laver en kasse
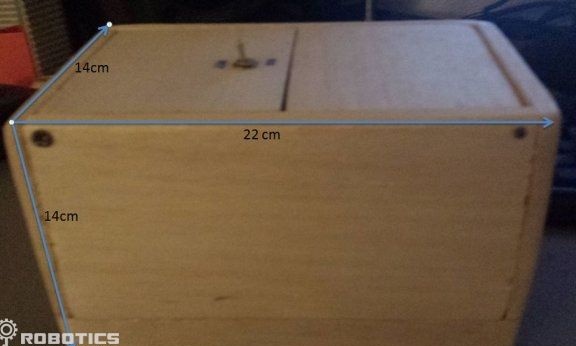
For at oprette en kasse, det vil sige en robotkrop, skal du finde krydsfiner eller kork. Derudover har du brug for en kraftig lim til limning af træ. Det er vigtigt at forstå, at jo mere strukturen vejer, jo mere energi vil forbruges. Hvad angår størrelsen på kassen, er den 22 cm x 14 cm x 14 cm.
Trin to Skematisk diagram elektronisk dele
Toppen af roboten inkluderer et Arduino-hovedkort, to servoer og en afbryder. Hvad angår kredsløbet, der er ansvarlig for mængden af støj, kan det erstattes med en almindelig modstand.
Servo-drev drives via den femte pin på Arduino-tavlen. Hvad angår signaltrådene, er de tilsluttet kontakter 9 og 10. Takket være disse PWM-kontakter styres servomotorernes rotationsvinkel. Dette er en vinkel fra 0 til 180 grader.
Den røde knap er nødvendig for at genstarte Arduino.
I bunden af kredsløbet er Arduino-motorskærmpladen.På tavlen kan du se to kanaler, A og B, takket være dem kan du om nødvendigt tilslutte to motorer på én gang. Hovedopgaven for dette bord er, at du med det programmelt kan indstille rotationshastighed, retning, pauser for enhver kanal i motorerne. Hvis du ser på diagrammet, anvendes kanal B, mens kontakt 13 bestemmer retningen, kontakt 11 er hastighed, og kontakt 8 bruges til at styre bremserne.
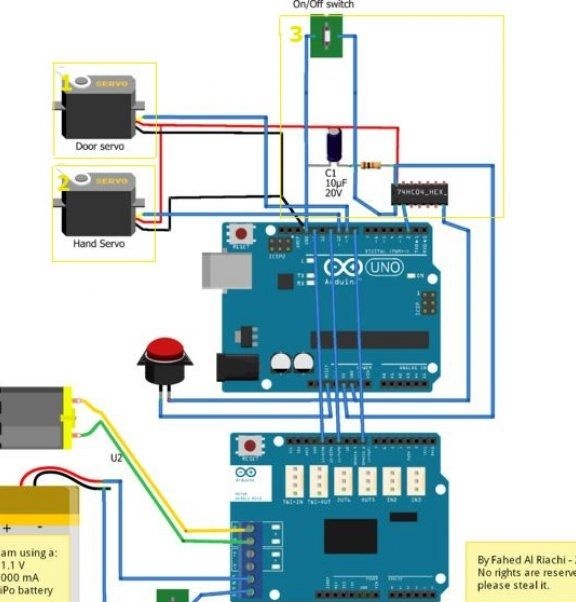
Strømkilden er et 11,1 / 1000 mA-batteri, det sluttes til Arduino-motorskærmskortet. Hvis det ikke bruges, er batteriet direkte tilsluttet hovedkortet.
Trin tre Motorinstallation
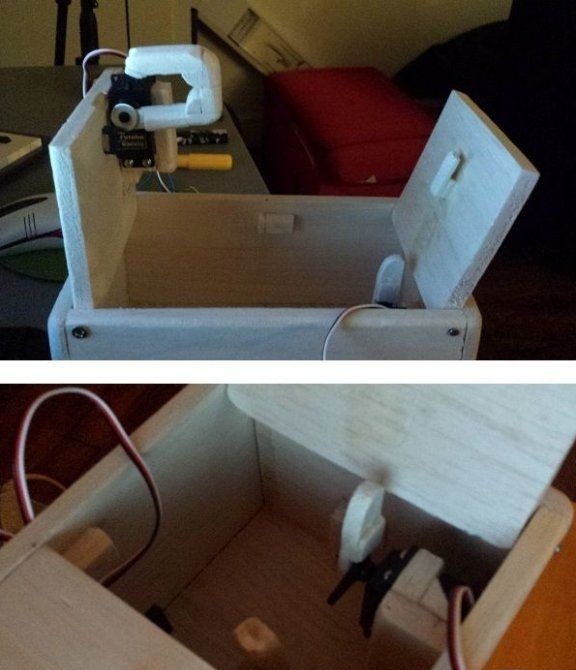
Servo-drevet og hænderne er installeret eksperimentelt, du skal i praksis kontrollere, om mekanikeren fungerer korrekt. For at kontrollere motorernes afvigningsradius kan du bruge Arduino IDE-programmet.
Til fremstilling af hænder taget træ af enhver art. Det vigtigste er, at det er let, da ellers vil energiforbruget stige. Hvad angår størrelsen på hånden, justeres den under installationen, vælges den ønskede længde, opnås den ønskede effekt.
Dækselskubben og hånden er monteret, så de ikke berører servomotoren under drift.
Trin fire Vi forbinder servomotoren og skifter til Arduino
Ved hjælp af ledninger og jumpere skal du forbinde alle elektroniske elementer til hinanden i henhold til det specificerede skema. Trådene skal lægges, så de ikke forstyrrer robotens bevægelige elementer.
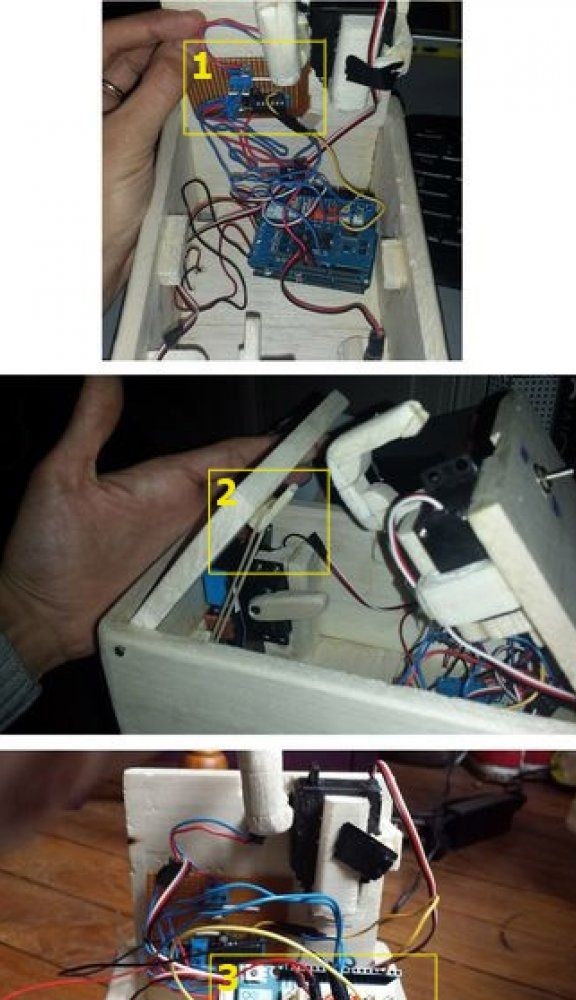
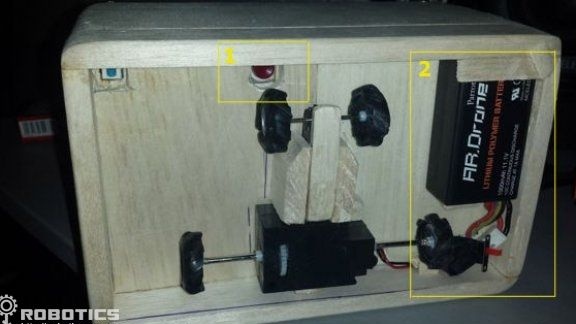
Under nummer 1 kan du se, hvordan det er tilsluttet, og hvor switching-kredsløbet er placeret. Nummer 2 markerer et sådant element som et elastisk bånd, det er nødvendigt for at døren åbner med en vis spænding. Tja, nummer 3 angiver motorskærmen installeret på Arduino.
Trin Fem Installation af den mekaniske del til bevægelse af kassen
I bunden af kassen er et batteri, en motor med hjul, en gearkasse, en nulstillingsknap og en vippekontakt til at kontrollere robotens magt. Inden elementerne monteres, skal du beregne balancen i kassens vægt. For at roboten skal være stabil ud over den forreste akse er der installeret en yderligere en.
Trin seks En anden yderligere funktion
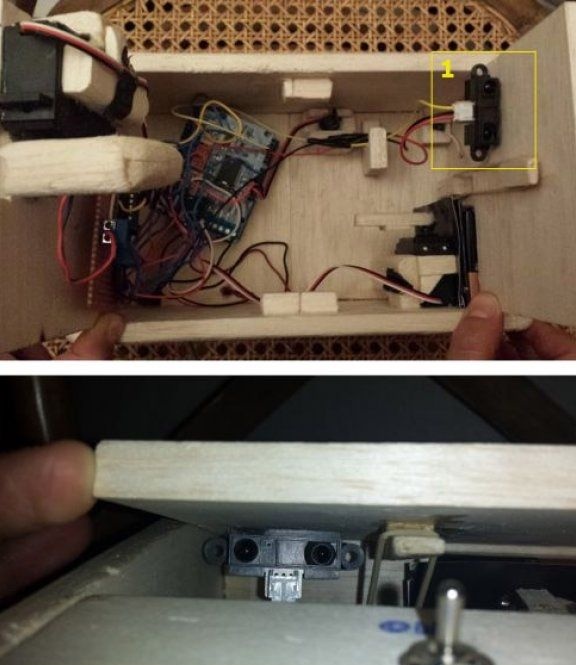
For at robotten skal bestemme bevægelsesretningen, kan den udstyres med en IR-sensor. Samtidig, når nogen forsøger at berøre vippekontakten, bevæger kassen sig til højre og venstre. Til disse formål er GP2Y0A21-sensoren egnet, den har tre ledninger. Gul skal tilsluttes den tredje pin Arduino, rød til pin 5, og sort til jord.
Det er alt, en simpel og på samme tid sjov robot er klar. Et sådant legetøj vil ikke kun give glæde for barnet, men også mange voksne overraske.
Firmware: