
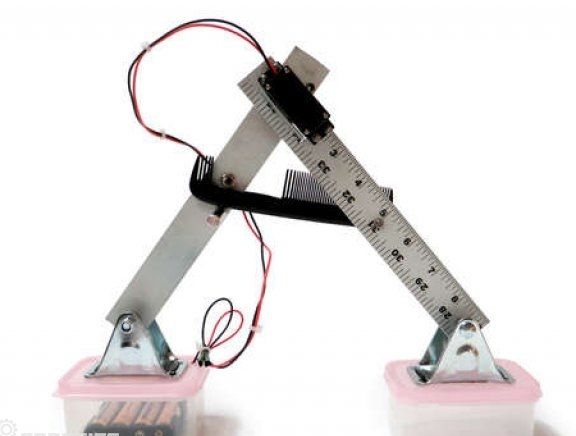
Det særlige ved en sådan robot er, at den samles fra en målelinje og husholdningsartikler. Robotten henviser til gangtypen. Ifølge forfatteren, i tilstedeværelsen af alle de nødvendige værktøjer og materialer, vil samlingen af en sådan robot kun tage et par timer.
Materialer og værktøjer til montering:
- servomotor konfigureret til direkte rotation;
- linealer i aluminium i størrelse 2 - 18 ";
- to små fødevarebeholdere;
- to ruller med hjul 2 "- 3" i størrelse;
- en almindelig kuglepen
- en tunger;
- ti små bolte med møtrikker;
- fire små skiver;
- en metalmotvægt 2 "- 3";
- fire nitter;
- en switch type DPDT;
- AA-batteriholder;
- fire AA-batterier;
- to ledninger i forskellige farver (sort og rød);
- elektrisk bånd.

Robotens fremstillingsproces:
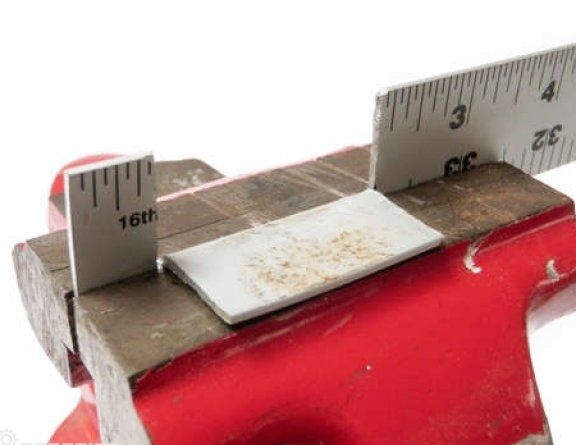
Første trin. Klip linealen
Først skal du tage en lineal og klippe den med en båndsav. I alt skal der opnås to segmenter på ni inches.

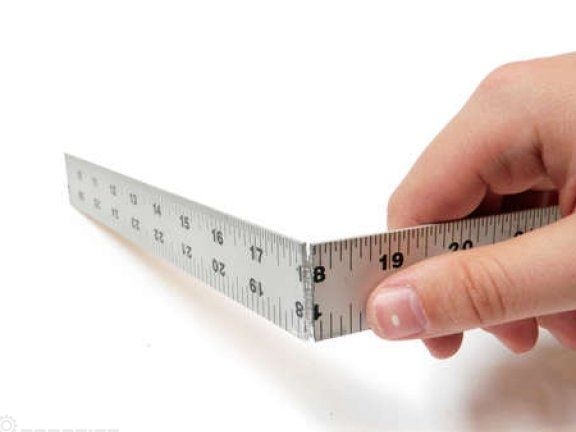


Trin to Opret mærker
På et stykke lineal skal du lave to 3/4 snit. Fra den ene kant skal dens dybde være 1/2 "og fra den anden 2-1 / 8". Dernæst skal linealen fastgøres i en skruestik og ved hjælp af hammeren til at bøje sektionen, vil dette være grundlaget for montering af motoren.



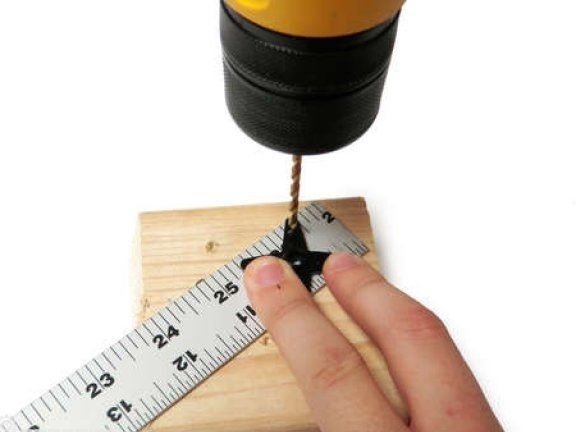
Trin tre Bor huller
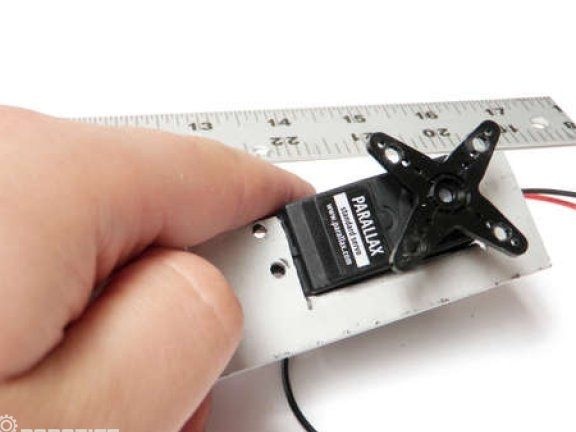
Nu skal du tage servomotoren og fastgøre den til det sted, hvor den skal monteres. Derefter skal du med en blyant mærke, hvor du derefter skal bore huller med en diameter på 1/8 ".

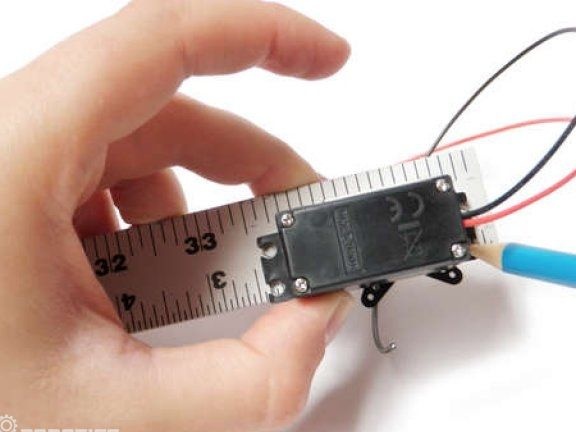


Nu skal du bore et hul 1/4 "og gå tilbage fra enden af linealen 1/2". Hullet bores i den modsatte ende, hvorfra motoren vil blive installeret. Det samme hul skal bores i slutningen af et andet stykke lineal.


Nu skal du bore huller i servo-bladene, for dette skal de fjernes. I alt skal du bore 4 huller som angivet på billedet med en diameter på 1/8 ". Derefter skal klingerne fastgøres til kanten af linealen og træde tilbage fra enden 1/2". Nu skal der laves lignende fire huller i linealen.





Og til sidst skal du bore huller 1/8 "og gå tilbage fra monteringsstedet for motoren 5". Du skal også bore 3/16 huller ved motorholderen. Du skal også bore et andet stort hul, som servoskruerne passer til. Det er alt, alle huller til samling af strukturen er klar.
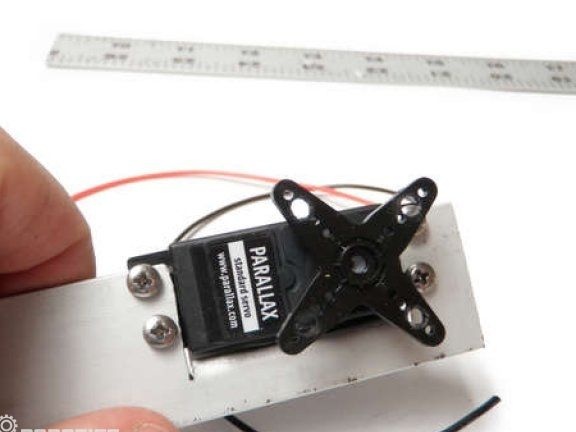
Trin fire Motorinstallation
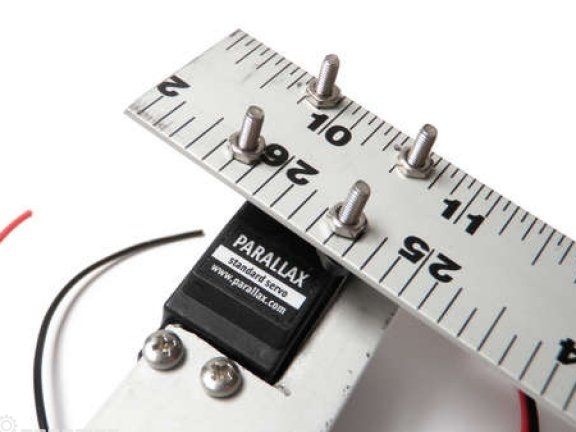
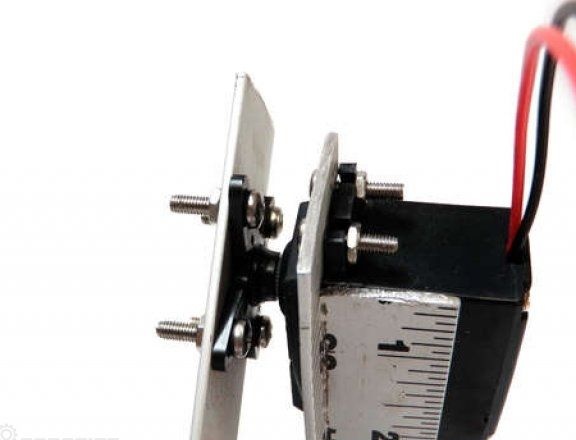
Motoren skal monteres på en lineal med møtrikker og bolte.For at sikre en lav profil skal skruehovederne være placeret på siden af servobladene. Derefter skal linjens anden halvdel fastgøres til servomotorens klinger. I dette tilfælde skal skruehovederne drejes indad, så intet forstyrrer linjernes bevægelse.

Trin Fem Kammusling forberedelse
På den ene side af tunger skal to inches af tænder fjernes. Den nemmeste måde at gøre dette på er med en sideskærer. Ved kammusling skal du efterlade et vist antal nelliker, takket være dem holder kammen på sporet. I kanten skal du bore et hul på 1/8 ". I det sidste trin slibes kammen omhyggeligt med sandpapir til en jævn tilstand.






Trin seks Tungekant installation
En skrue skal indsættes i tungerhullet, derefter skal der placeres to skiver på skruen, de giver dig mulighed for at tage kammen fra linealerne til en bestemt afstand. I det sidste trin installeres bolten i en lineal, og derefter kammusling fastgøres med en møtrik.

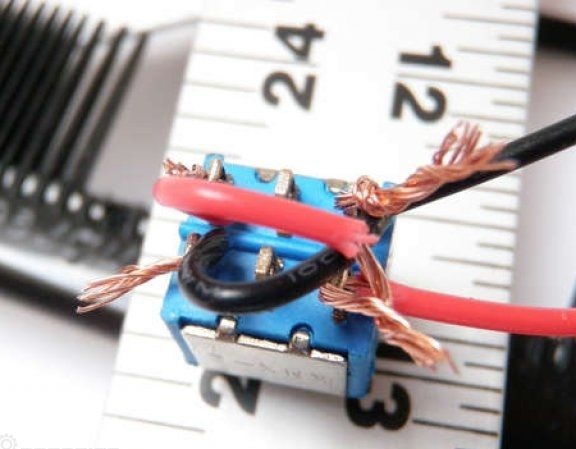
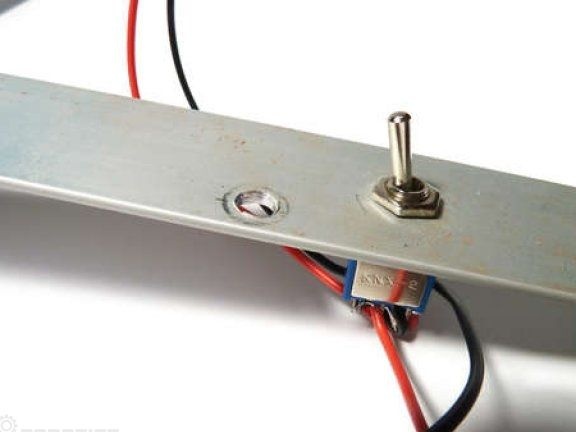
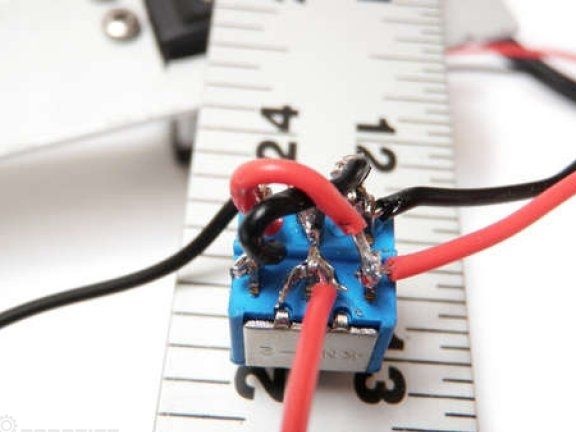
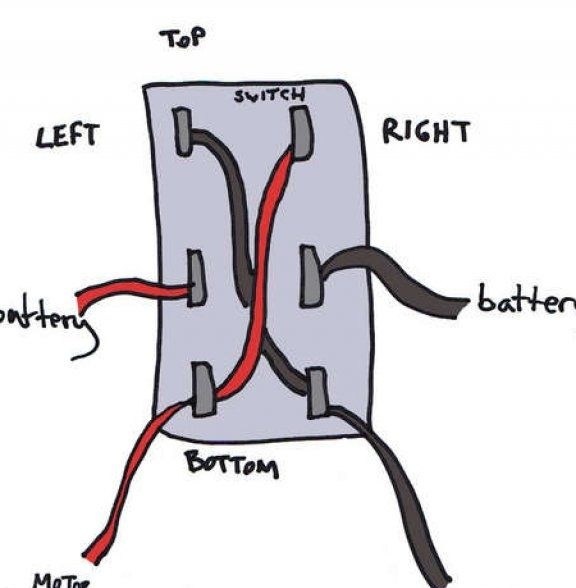
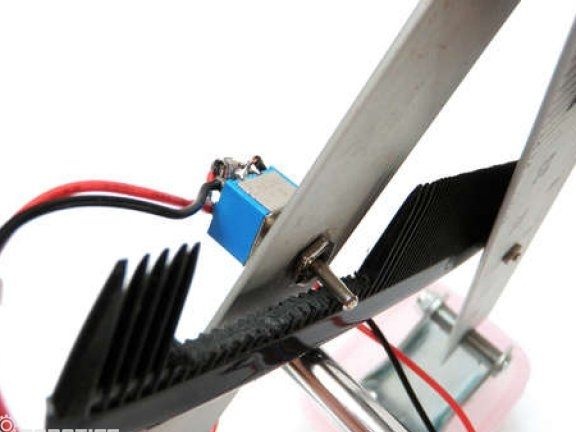
Syvende trin. Skift montering
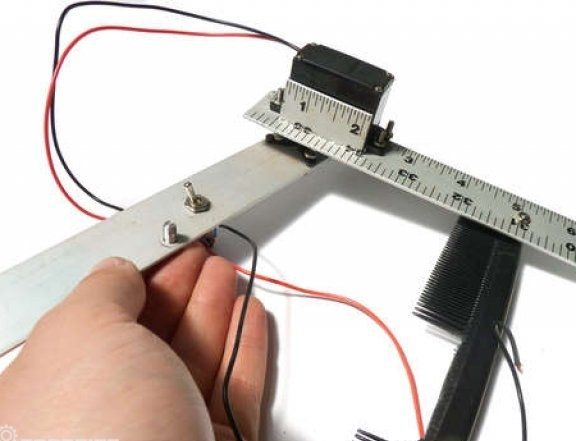
Kontakten skal indsættes i det forberedte hul og fastgøres med en møtrik. Kontakten skal indsættes i den position, der er angivet på fotografierne. Nu skal du tage to trådstykker, rød og sort, og lod dem til kontakten som vist på billedet. Derefter skal du lodde to lange ledninger til kontakterne på kontakten.

Trin otte. Modvægt installation.
Modvægten er installeret i den del af linjen, hvor servomotoren er installeret. Kammen monteres oven på modvægten.
Trin ni. Klip grebet
Tag ampullen fra kuglepen og skær derefter pennen i to stykker en tomme. Dernæst skal de fremstillede rør skæres i to dele, hvilket resulterer i, at der kommer fire rør ud.


Trin ti Hjulekstraktion
Nu skal du tage to ruller og adskille dem ved at fjerne hjulene. Hjul skal lægges til side, de kan bruges i andre. hjemmelavede produkter.



Trin elleve. Opret drejepunkter
Huset fra rullen skal placeres i midten af låg på plastbeholderen. Nu skal du bore fire huller og fastgøre elementet med bånd.

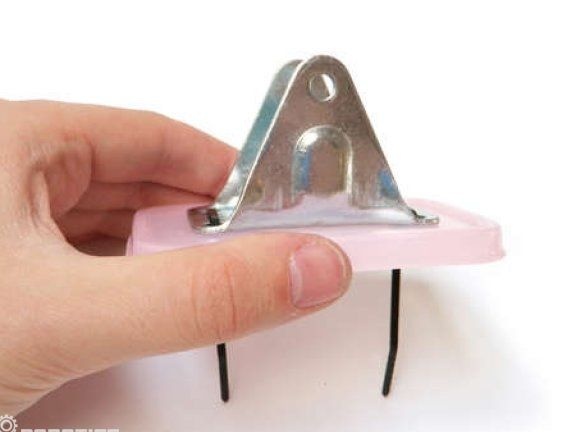

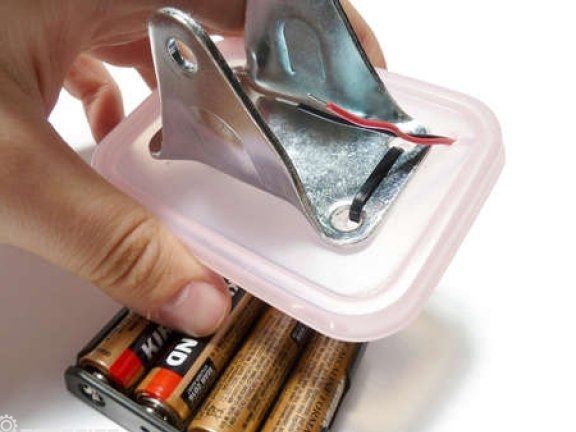


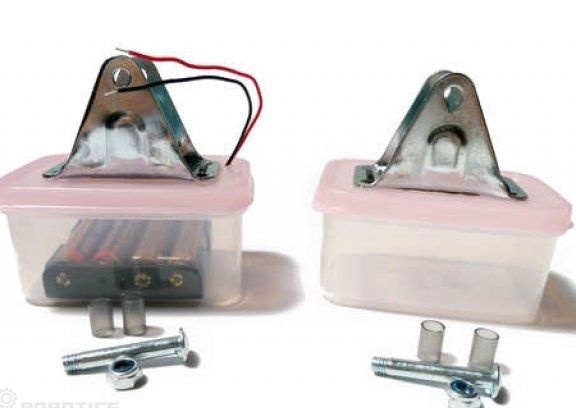

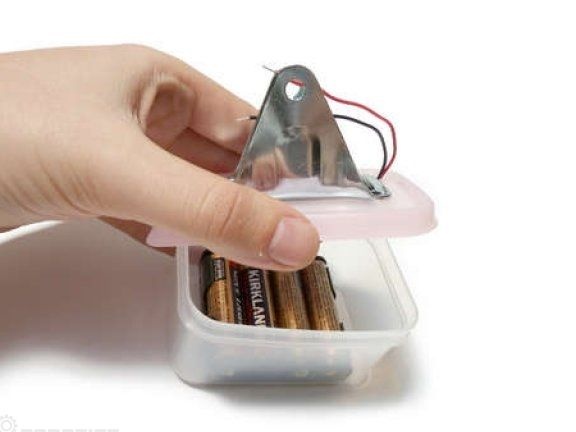

Også på dette tidspunkt kan du installere en strømkilde. For at gøre dette skal du i en af beholderne bore et hul og installere batterierne inde. Efterfølgende skal du gennem det borede hul udlede ledningerne.
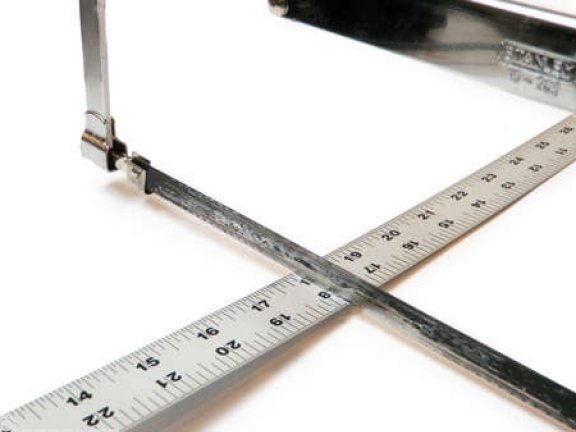
Trin tolv. Robotsamling
Derefter skal begge linealers ender fastgøres til understøttelserne, som angivet på fotografierne. Nu er det kun at tilslutte ledningerne fra strømmen og kontakten, det er let at gøre i overensstemmelse med trådens farver.
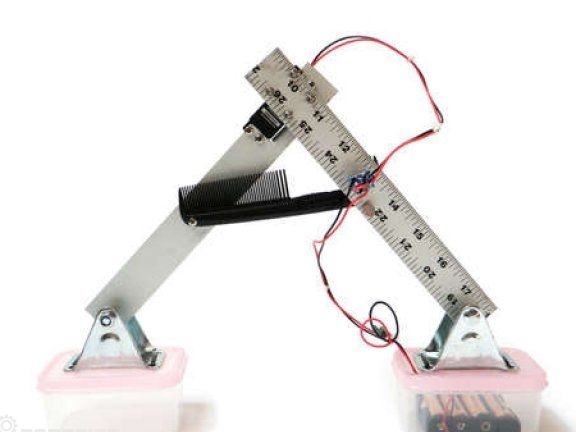
Det er alt, roboten er klar. Når motoren kører, begynder roboten at bevæge sig, på et eller andet tidspunkt slukker kammusling strømmen, og robotens ben vender tilbage til deres oprindelige tilstand. Derefter tænder afbryderen igen kredsløbet, og robotens ben komprimeres igen. Så han vil gå.