

Ofte på fora er der spørgsmål om, hvordan man laver en lille robot gør det selv fra improviserede materialer. Nogen ønsker at teste deres styrker og færdigheder i at skabe mini-robotter, og nogen vil bare overraske venner eller deres barn. Faktisk er alt ganske enkelt, du skal bare vise lidt tålmodighed og opfindsomhed.
Vi gør opmærksom på følgende video:
For at oprette en lille insektrobot skal du:
- havelampe (solbatteri);
- to kondensatorer;
- motor;
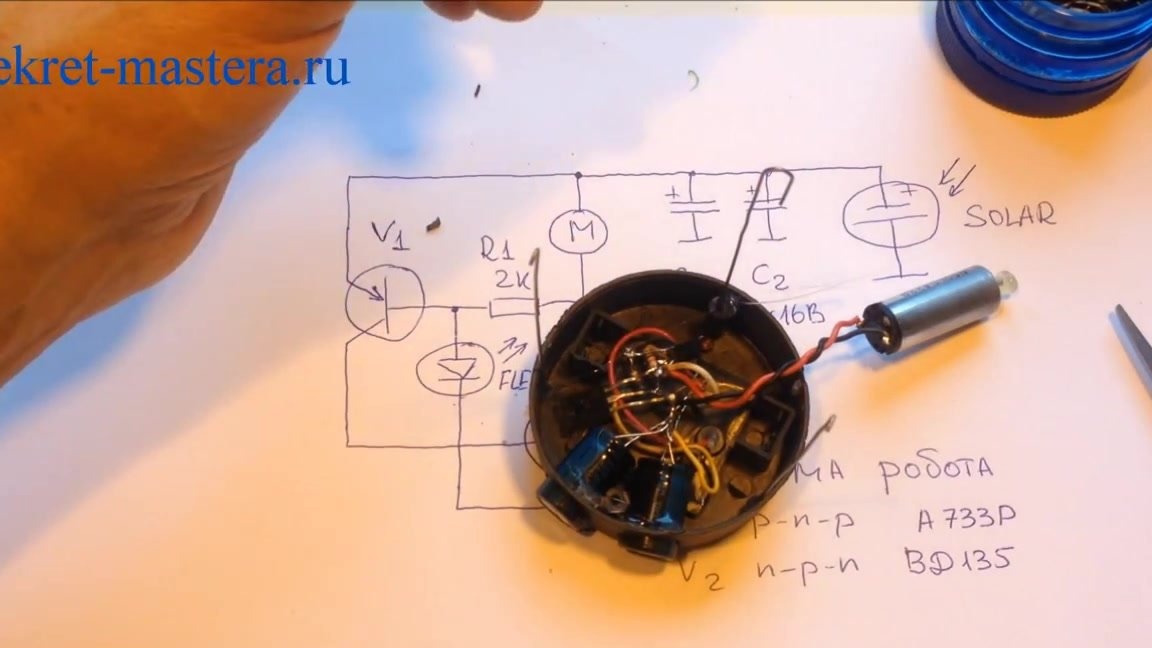
- transistor VD135;
- transistor A733P;
- LED;
- modstand;
- loddejern;
- kobbertråde;
- en kniv;
- varm lim;
- papirclips.
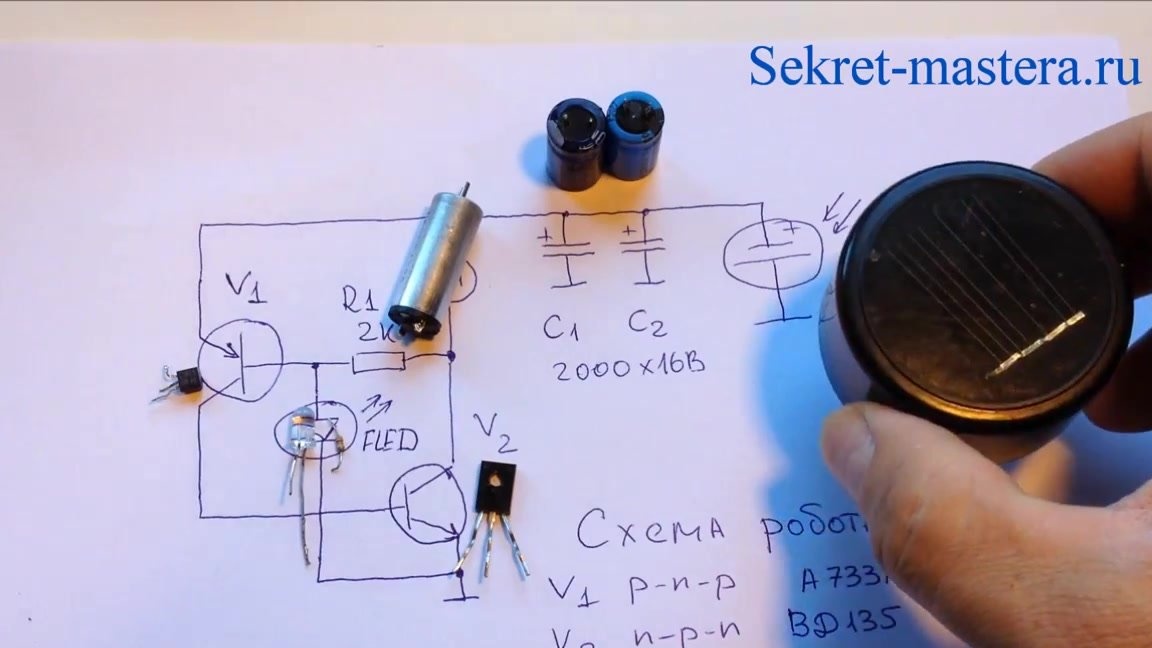
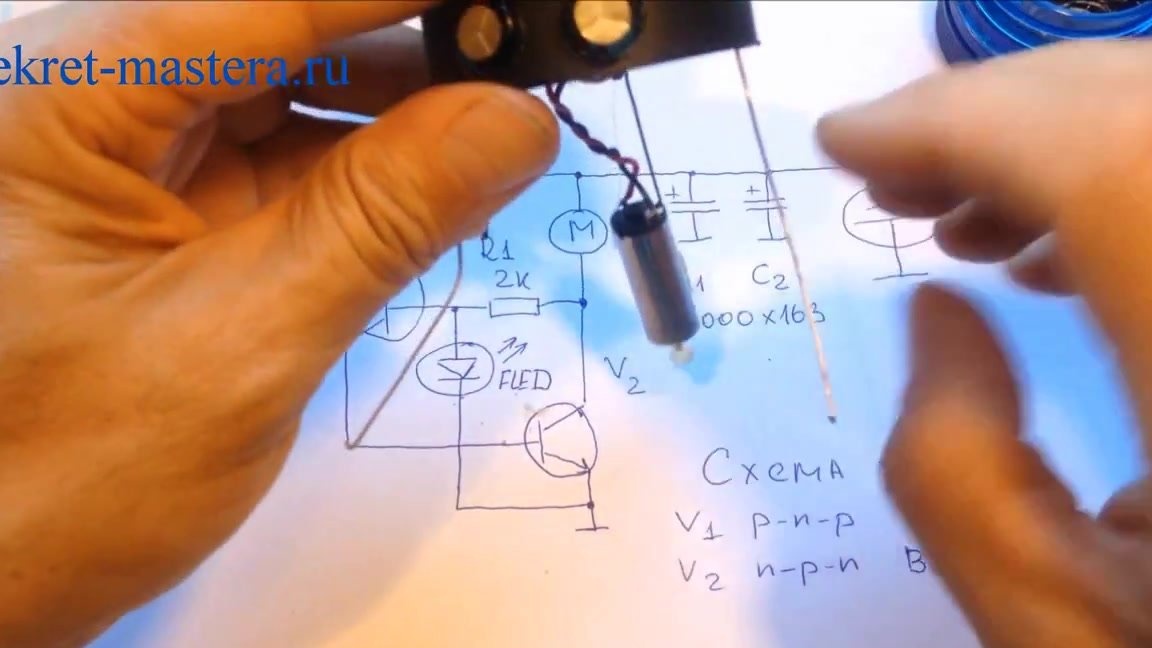
Kapacitansen for hver kondensator er 2000 μF, bedømt for en spænding på 16V.
Motoren kan bruges fra en gammel tandbørste, og du kan også bruge motoren fra et gammelt filmkamera.
En kraftig transistor (det er tilladt at udskifte den med en medium effekttransistor), en n-p-n struktur, i dette tilfælde vil VD135 bruge.
Den anden transistor af p-n-p-strukturen i dette tilfælde vil bruge A733P.
En blinkende LED giver blink med regelmæssige intervaller.
2 kΩ modstand.

Når alle de nødvendige radioelementer er forberedt, begynder vi at arbejde.
Arbejdsprincip:
Energien fra solbatteriet gemmes på to kondensatorer, og med en bestemt frekvens aktiveres LED'en, der leverer strøm gennem en kraftig nøgletransistor til motoren. I dette tilfælde tømmer motoren kondensatoren og udfører nogle roterende bevægelser.
samling:
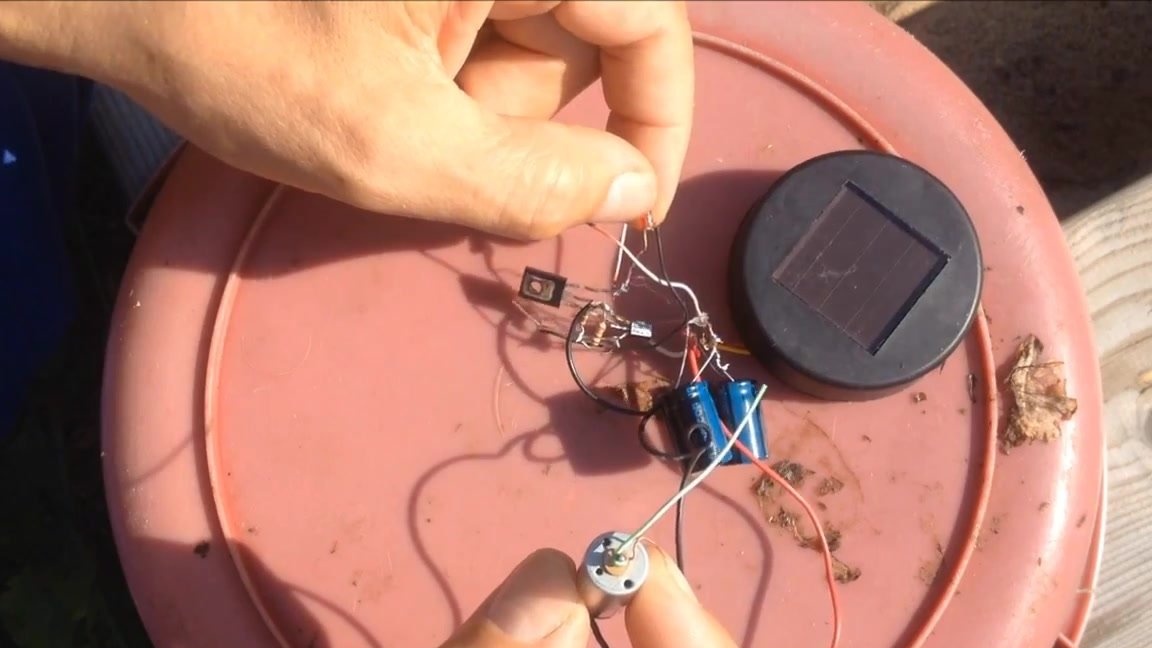
I tilfælde af solbatteri laver vi to huller med en kniv og indsætter kondensatorer i dem - dette vil være vores insekt øjne. Vi fikserer dem med smeltlim.
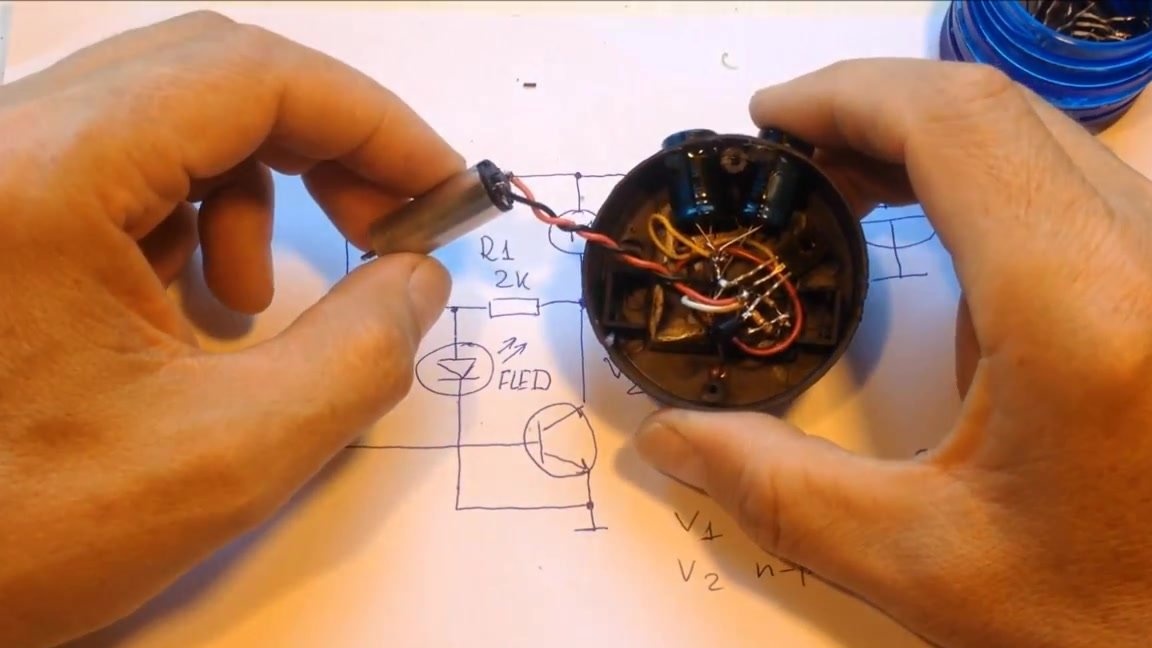
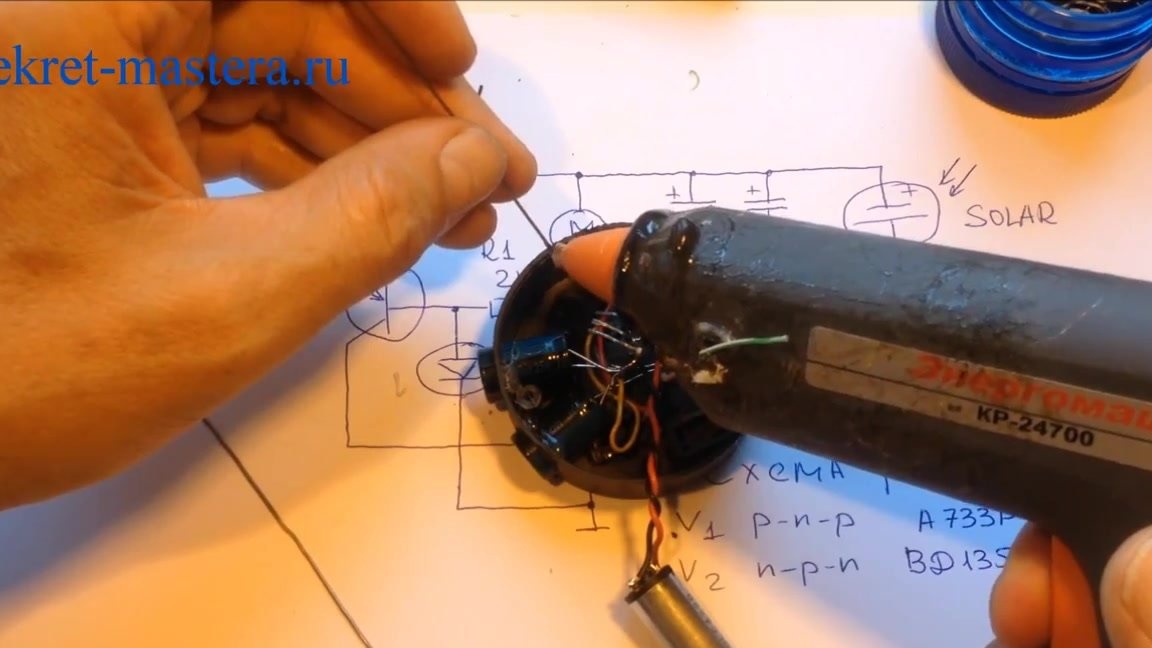
Derefter samler vi ved hjælp af et loddejern og ledninger alle radioelementer i henhold til skemaet.
Alle elementer sidder fast i solenergibatteriet, på en langstrakt ledning forlader vi kun motoren og fikserer den ikke.
En stor dråbe lim påføres spidsen af motoraksen, endda flere gange, for at danne en lille kugle på spidsen.
Vi laver benene på vores insekt af almindelige papirclips.Ret papirklemmen, så kun den lille spids er ubundet, og fastgør den på kroppen med varmsmeltet klæbemiddel. I alt har vi tre ben.
Vi fastgør vores motor til et af benene, så det roboten læste sig på en kugle dannet ved dens ende.
Valgfrit kan du give benene den nødvendige form, let bøjes eller rette.
