Skibsføreren samlede denne fræsemaskine hovedsageligt ud fra det materiale, han havde til rådighed.
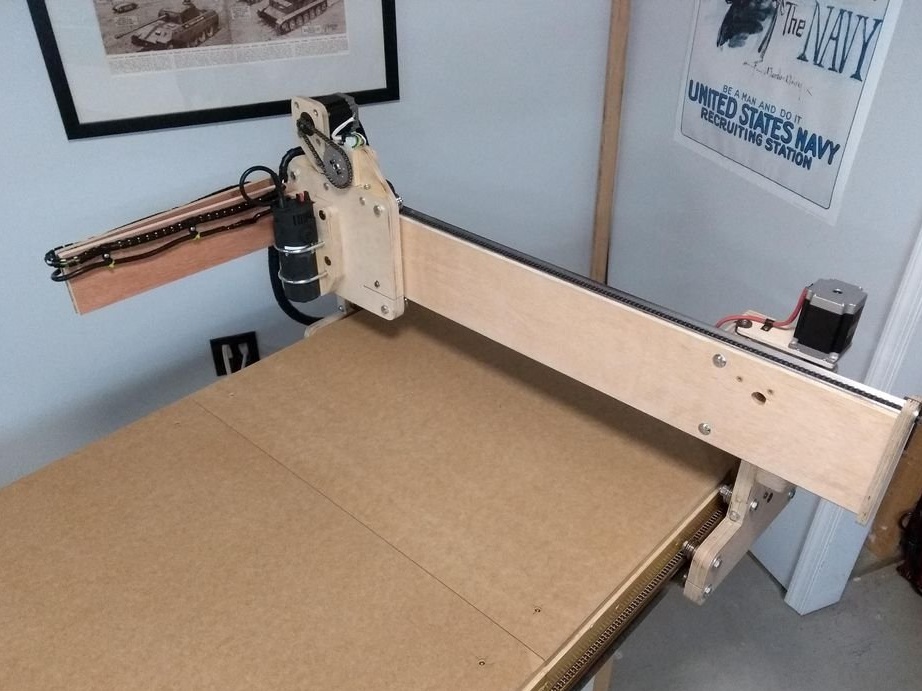
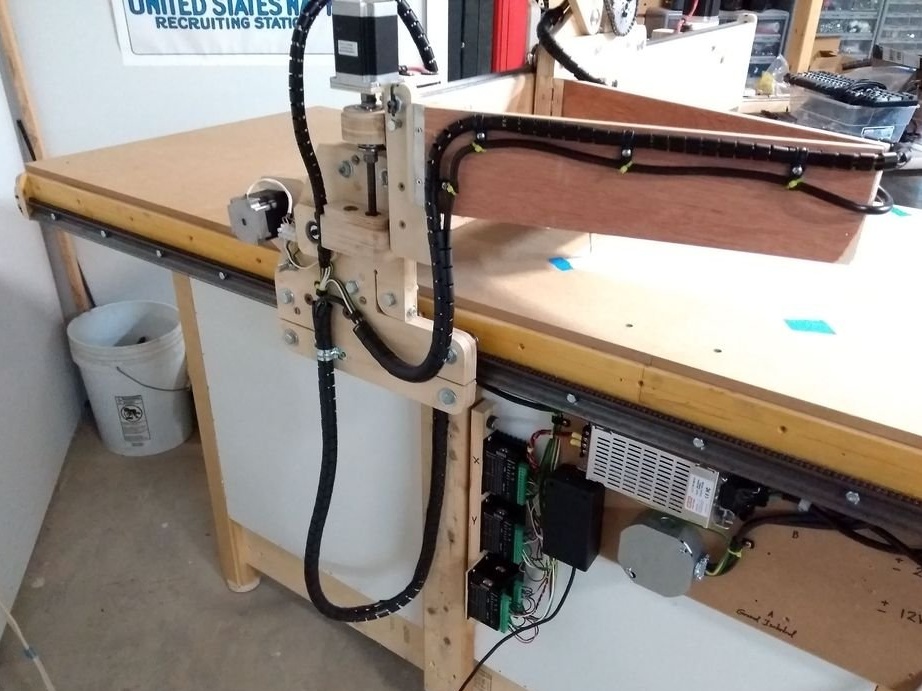
Dette er en klassisk tre-akset fræsemaskine. Det har en portal, der bevæger sig langs længden af basen (Y-aksen). Der er en vogn, som routeren er monteret på, og den bevæger sig frem og tilbage (X-aksen). Og der er en mekanisme, der hæver og sænker routeren op og ned (Z-aksen). Til bevægelse bruger mesteren trinmotorer og kæder. Til lineære skinner bruges stål V-lejer, der strækker sig over et stålhjørne. Guiden giver ikke detaljerede instruktioner, kun det generelle koncept og ideer.
Værktøjer og materialer:
- Sengebord;
-Door;
-Roliki;
-Metal hjørne;
-Fanera;
-Krepezh;
-Drel;
Fræsning fræser;
-Pila;
seeing-;
-kæde;
-Trådstang;
-Snap motorer;
-Zvezdochki;
-Podshipniki;
-Adapter til en støvsuger;
-Arduino;
- Estlcam-controller;
-Solidarisk relæ;
-Kraftforsyning;
-Spænd drivere;
Trin 1: Tabellen
Skibsføreren gendannede bordet fra det gamle natbord. Som bordplade spikede skibsføreren en trædør til bordet. Nedenfor blev installeret ruller.



Trin to: Skinner
Skibsføreren bruger et metalhjørne som vejledning. Skibsføreren fastgør fire lejer med en rille på et krydsfineremne. Det er tydeligt, at hjørnet er fastgjort på begge sider af bordet.




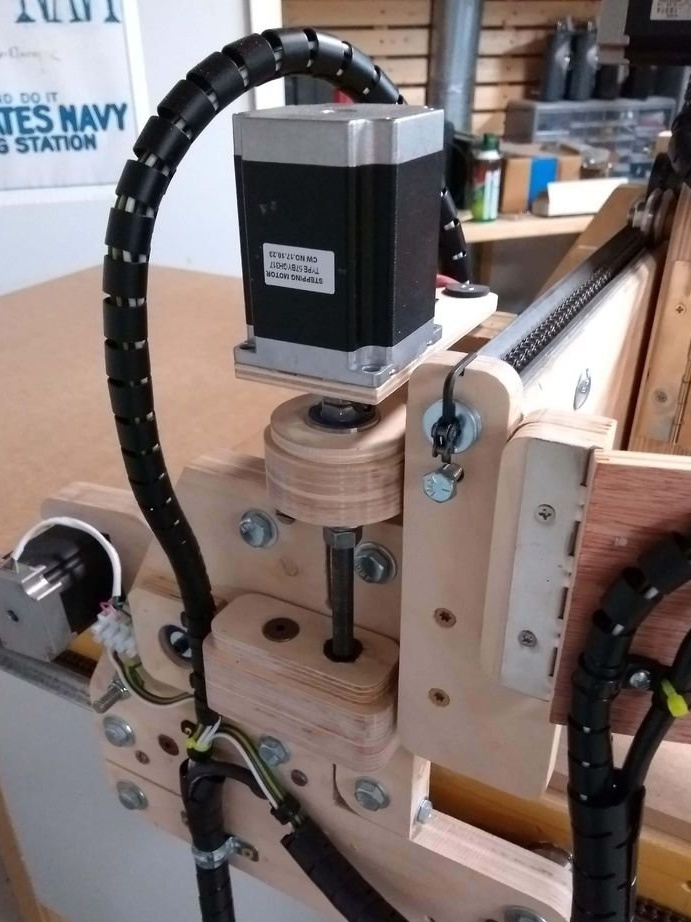
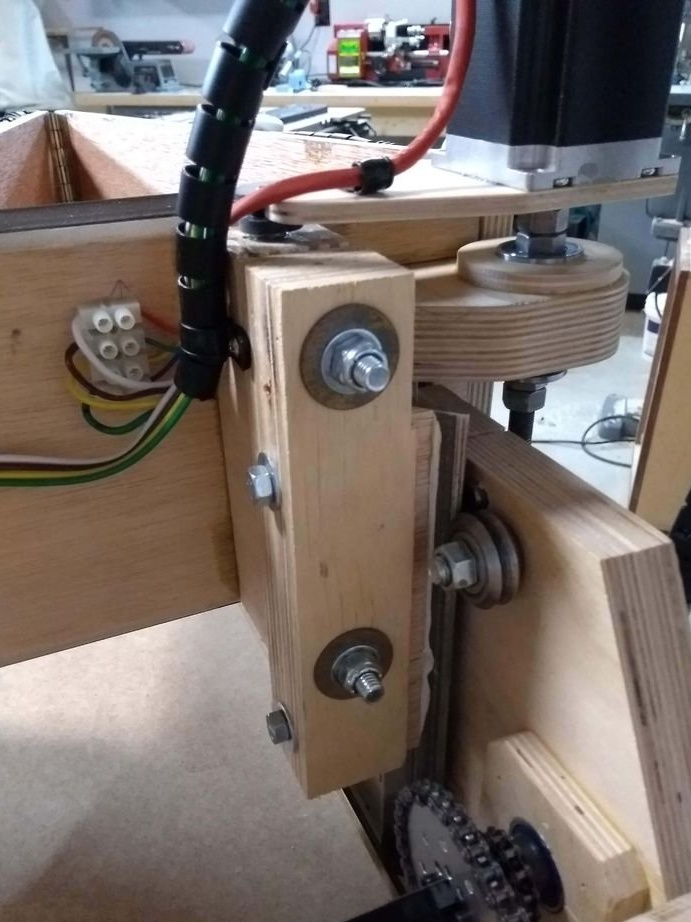
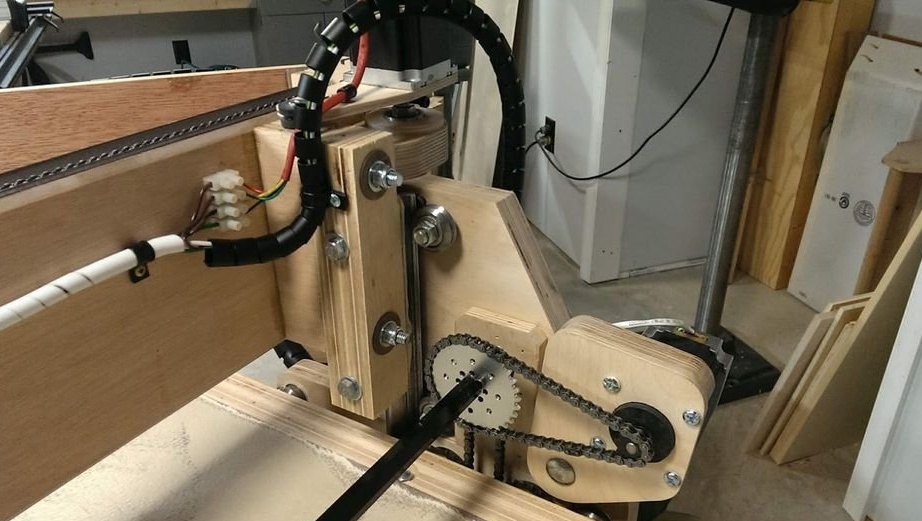
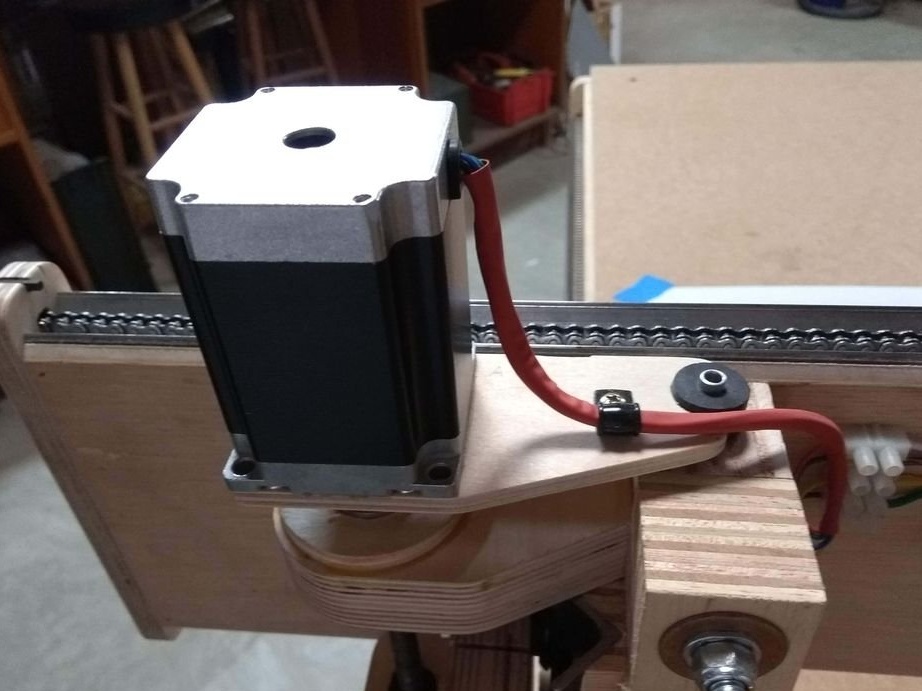
Trin tre: Portal
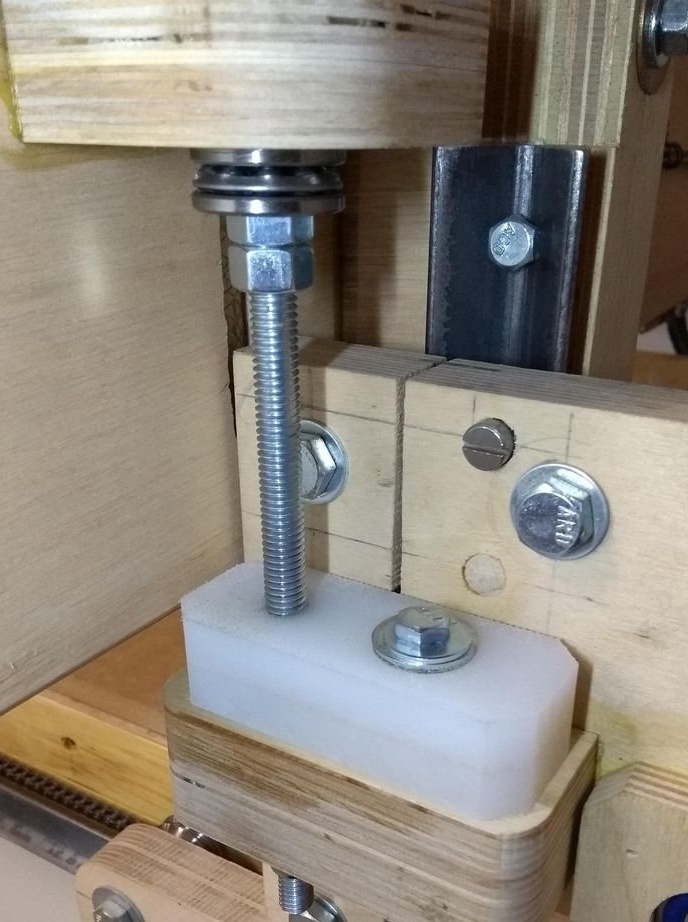
Portalen er bygget af to lag krydsfinér limet sammen. En fræsemaskine er monteret på portens tværgående detalje. Den tværgående del bevæger sig sammen med fræseskæret op / ned langs de samme skinner som i det foregående trin. To trinmotorer er installeret for at bevæge sig langs kanterne. Skibsføreren sikrede lange bolte til motorernes akser. I bunden er der en knude med nødder. Ved en kommando begynder motorerne at arbejde, akslerne roterer, og fræseskæret sænkes eller stiger.
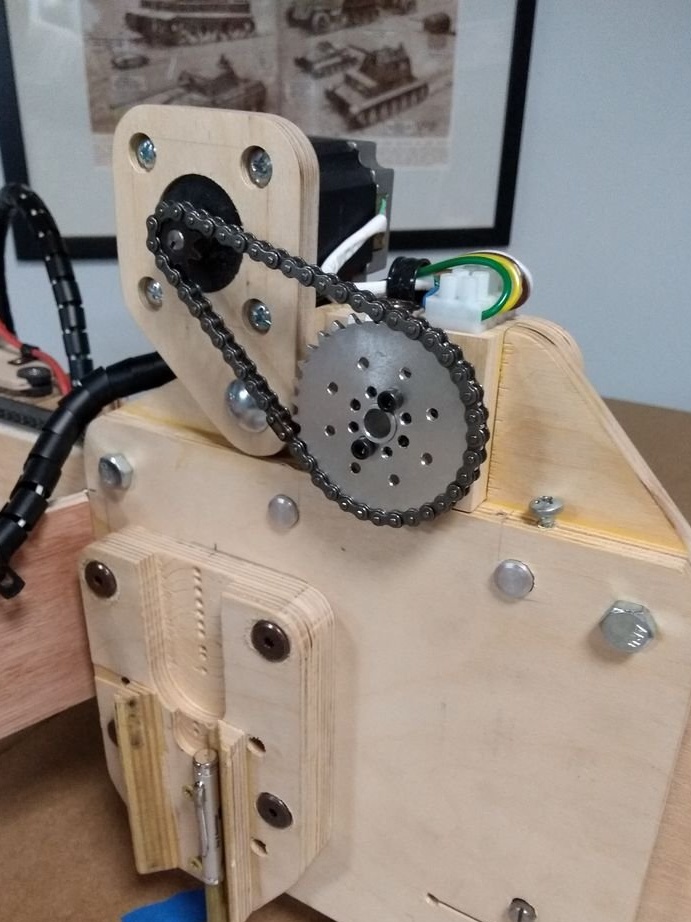
For at flytte vognen med møllen på Z-aksen bruger skibsføreren en trinmotor og et kædehjul.





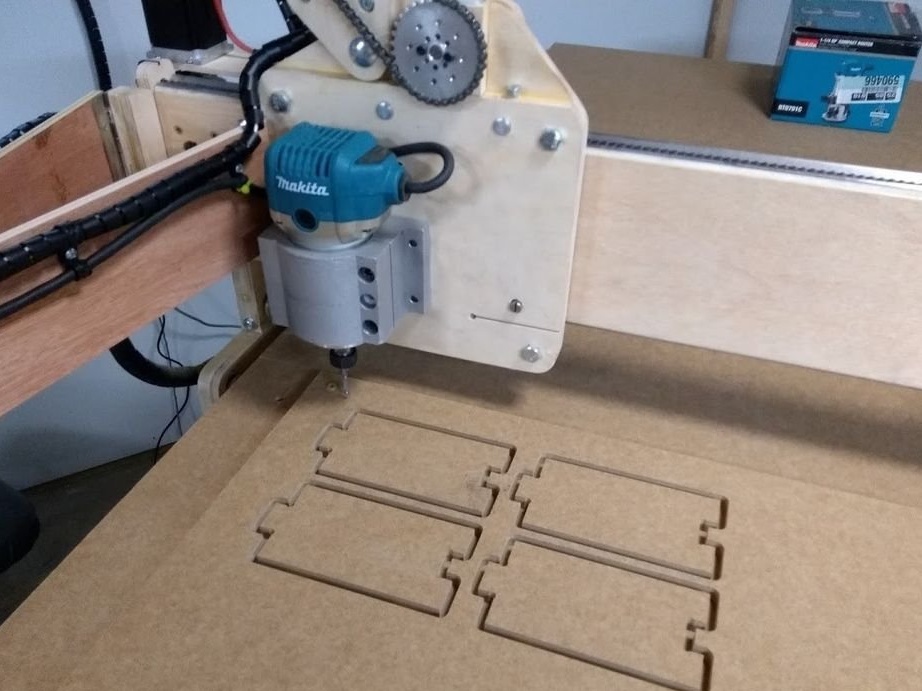
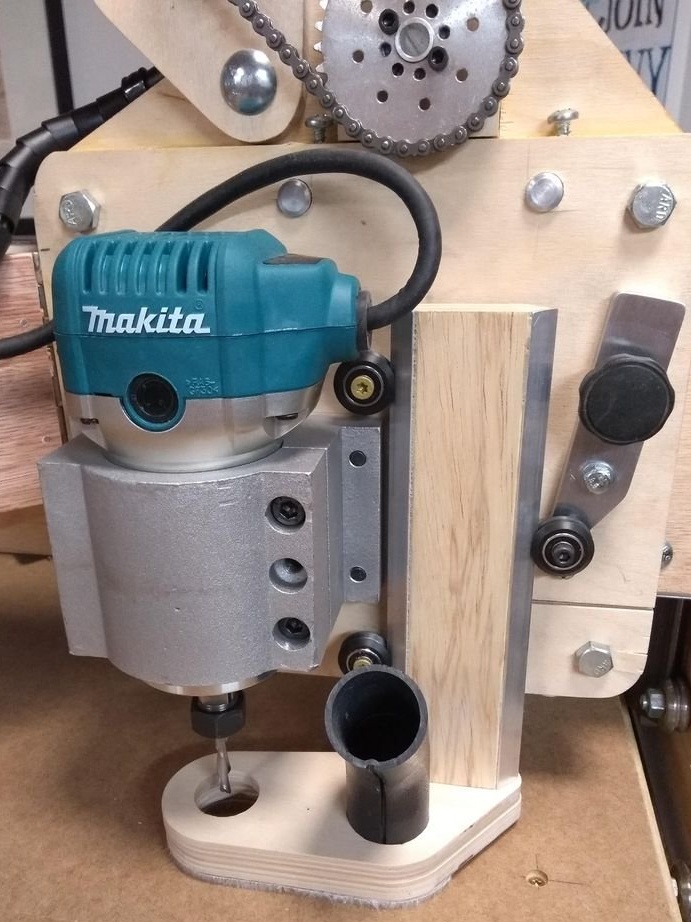
Trin fire: Fræserkutter
En Makita RT0701C-router er installeret på maskinen. Masteren installerer også en adapter til tilslutning af støvsugers slanger.



Trin fem: Management
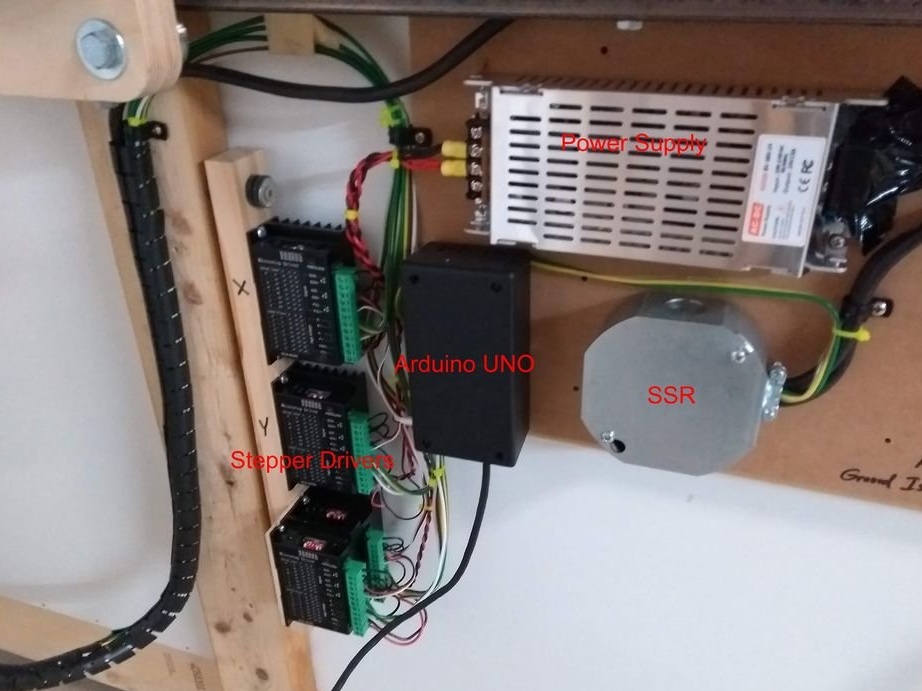
Management system baseret på Arduino UNO og en lille pc med EstlCAM CNC-software.
Arduino Uno er monteret på bagsiden af maskinen og understøtter Estlcam-controller-software. Den elektriske kasse indeholder en 10A SSR (Solid State Relay), der tænder og slukker routeren. Til venstre er TB6600 trinførere og en 24 V, 15. A. Ledningerne til motorerne passerer gennem korrugeringen. En Windows 10-pc viser billedet på skærmen og styres af en trådløs mus og tastatur.

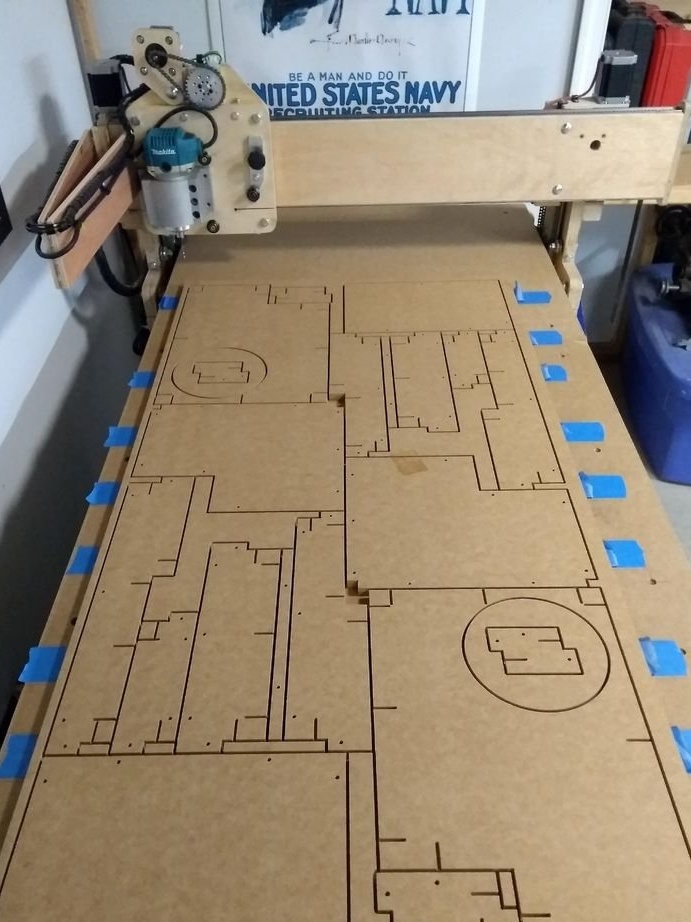
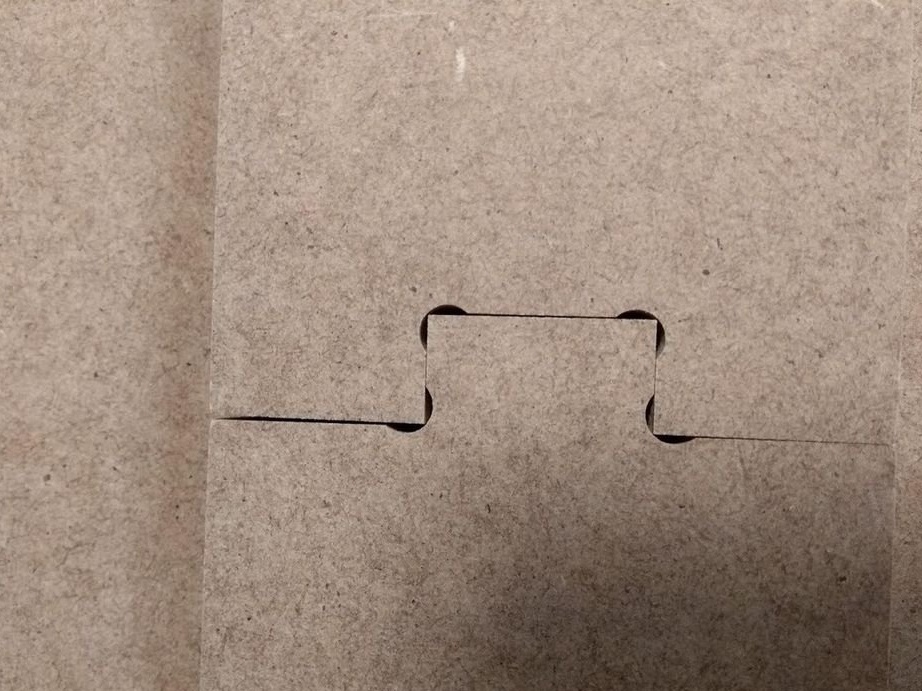
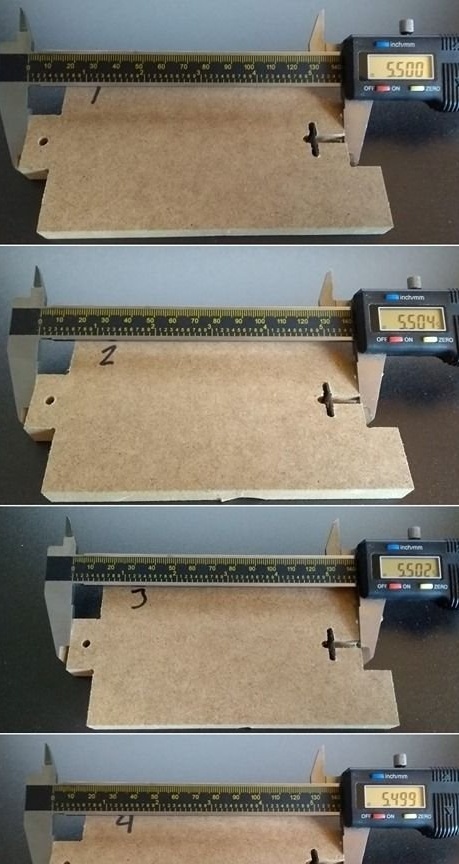
Ifølge masteren viste maskinen sig at være ganske normal, det sidste foto viser eksempler på, hvordan maskinen fungerer.