

Hvis du laver din første quadrocopter, og du ikke har en 3D-printer, er denne instruktion til dig. På vejen til at bygge denne quadrocopter lavede skibsføreren syv modeller, og hver havde sine egne, betydelige mangler. Til sidst var han i stand til gennem prøve og fejl at få dette til at fungere modellen.
Værktøjer og materialer:
- Krydsfiner med en tykkelse på 7 mm og en størrelse på ca. 30 x 22 cm;
- Aluminiumsprofilrør 25 * 25 mm - 1 meter;
-Izolenta;
-Krepezh;
-Latch tråd;
-Lodning tilbehør;



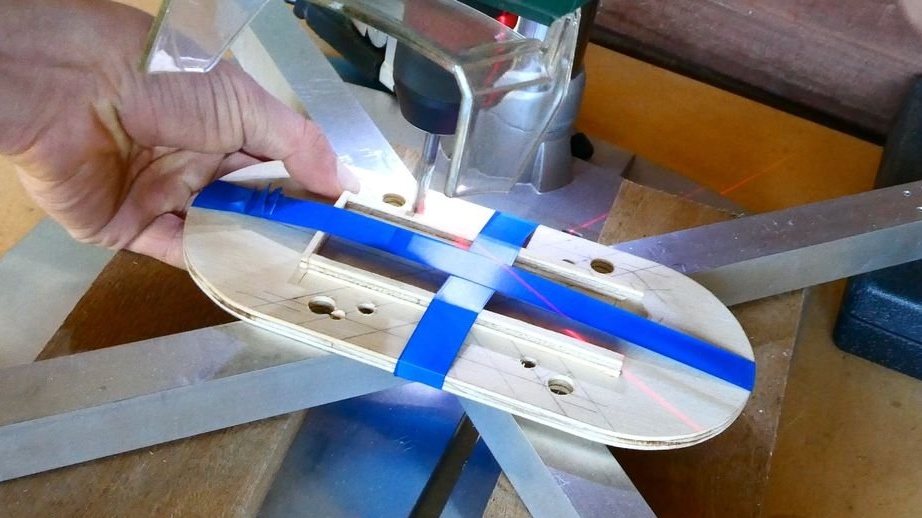
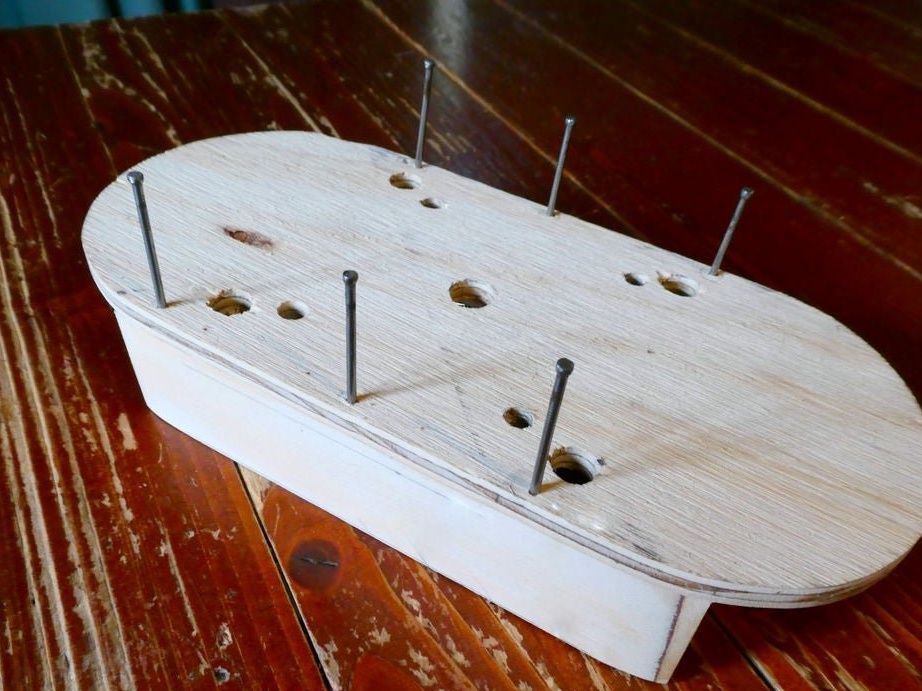
Trin 1: Sagen
typen skabelon og sæt den på krydsfiner. Klip delene ud og bor alle huller.
Placer batteriet på basen, og balance basen. Skitsér batteriet. Lim strimlerne på tre sider af batteriet.





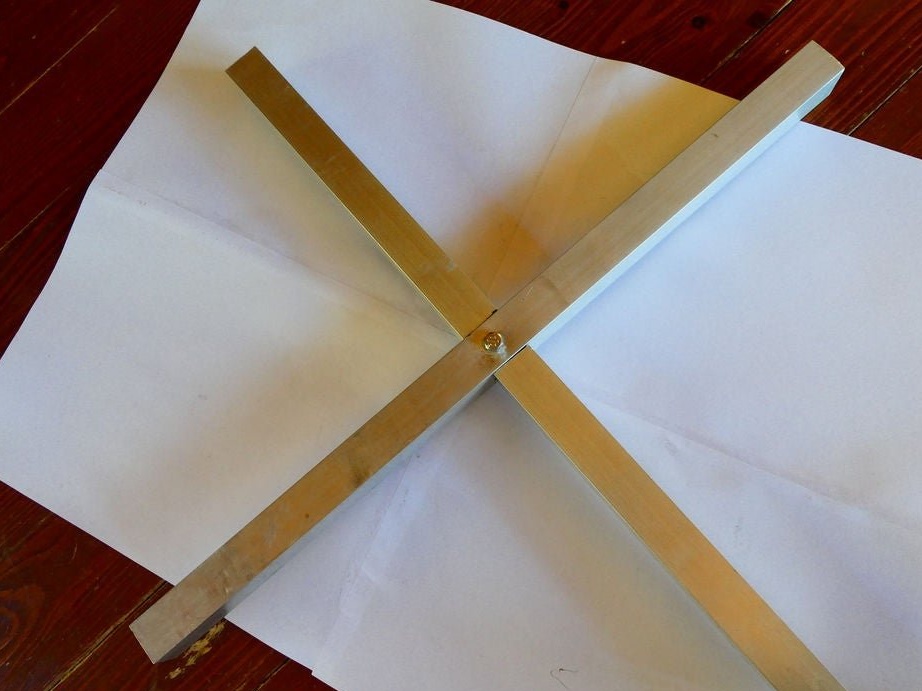
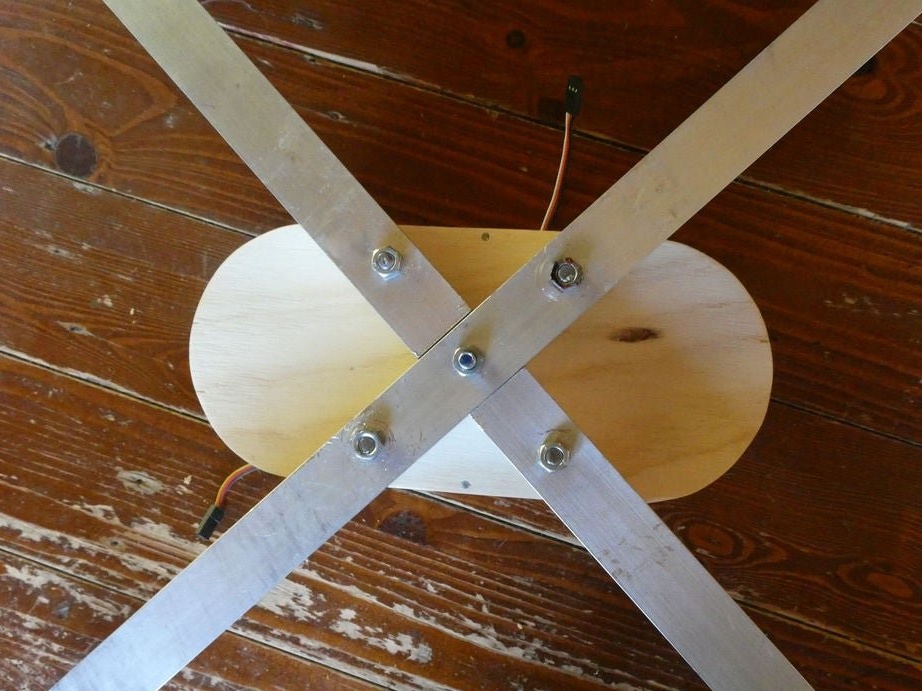
Trin to: Ramme
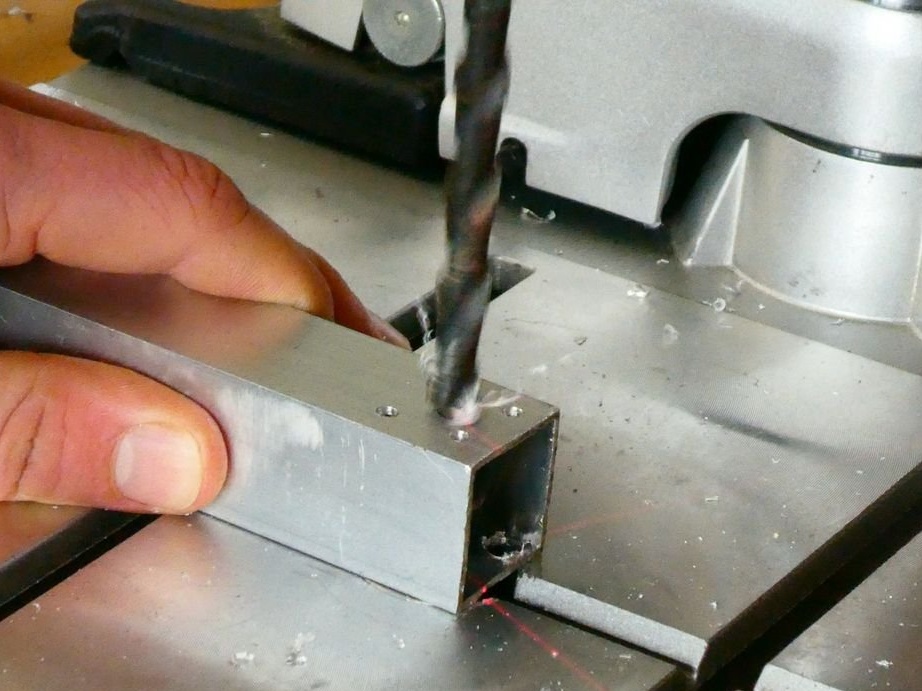
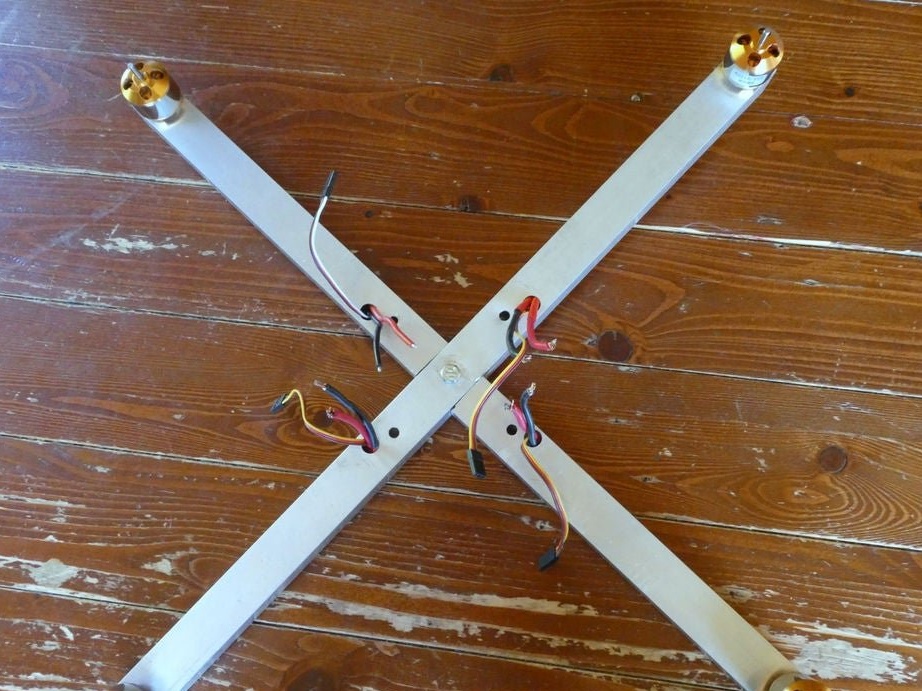
Skær aluminiumsprofilrøret i to lige store dele (50 cm hver). Skær to riller på 2,5 cm i midten af rørene Bor i midten af hullet. Saml korset og fastgør med en bolt.

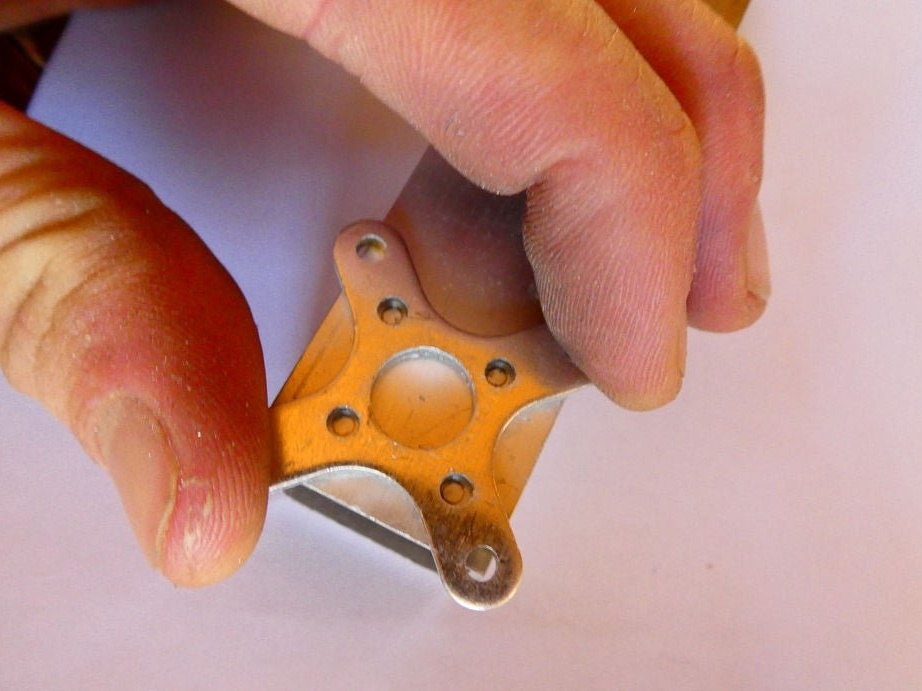
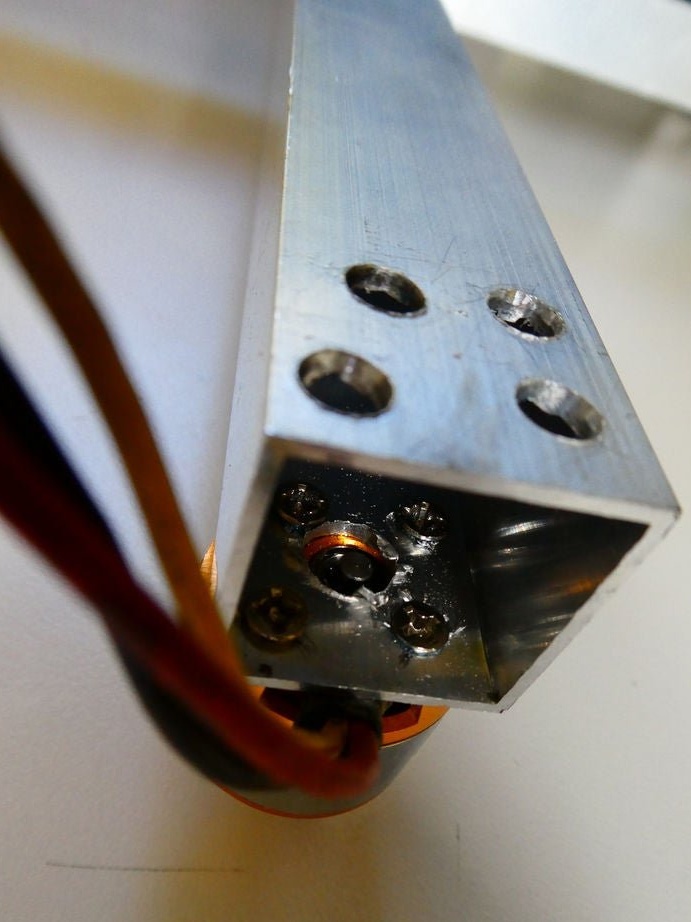
Brug nu det motorophæng, der følger med dem, til at markere monteringshullerne. Bor huller. Modhagerne skal slibes.

Marker og bor monteringshullerne til fastgørelse af chassiset på rammen.
Lim sidestrimlerne på kroppen.

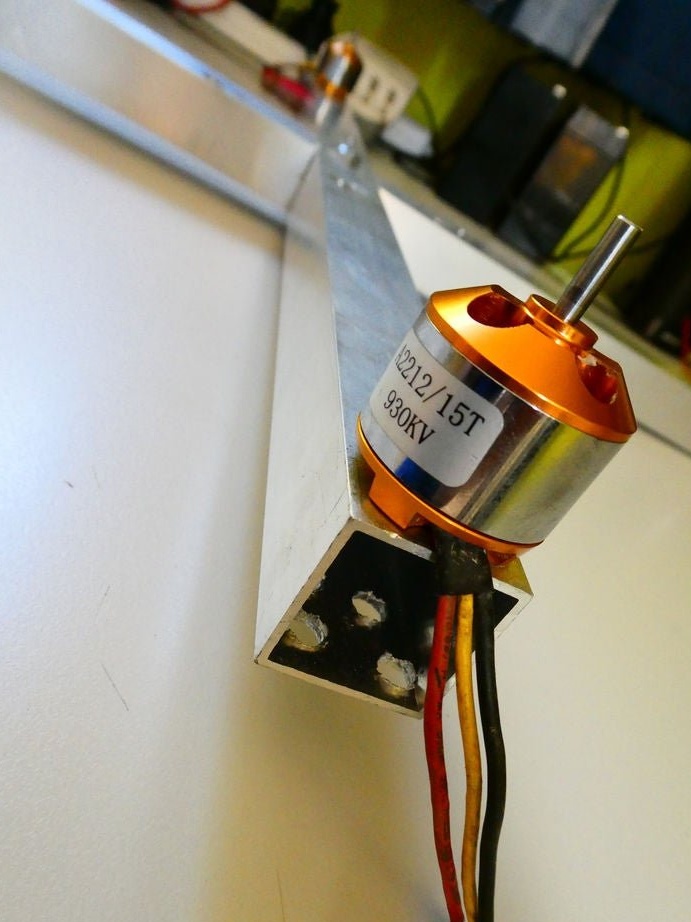
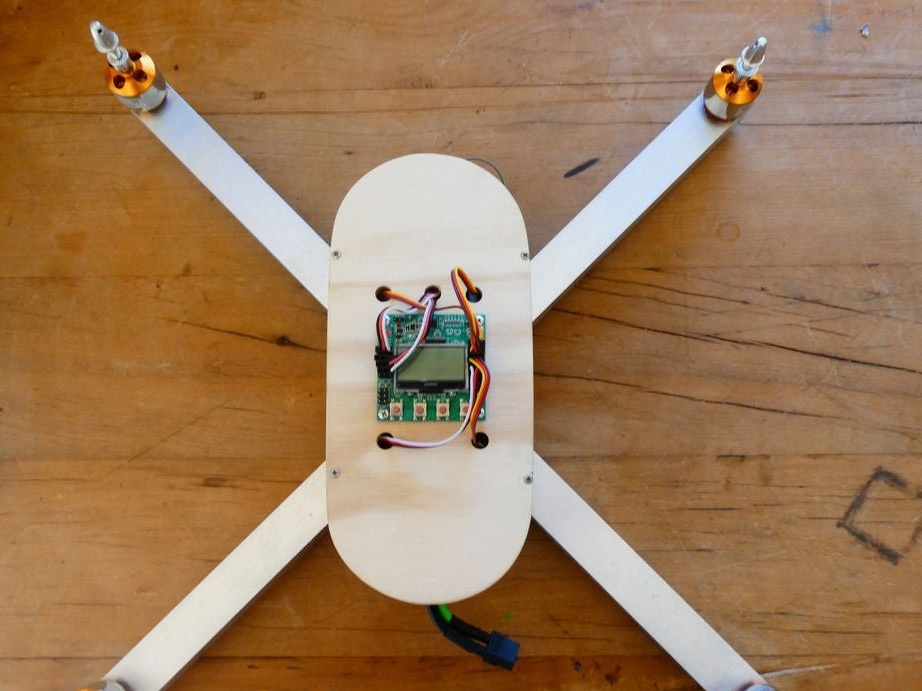
Trin tre: Installation
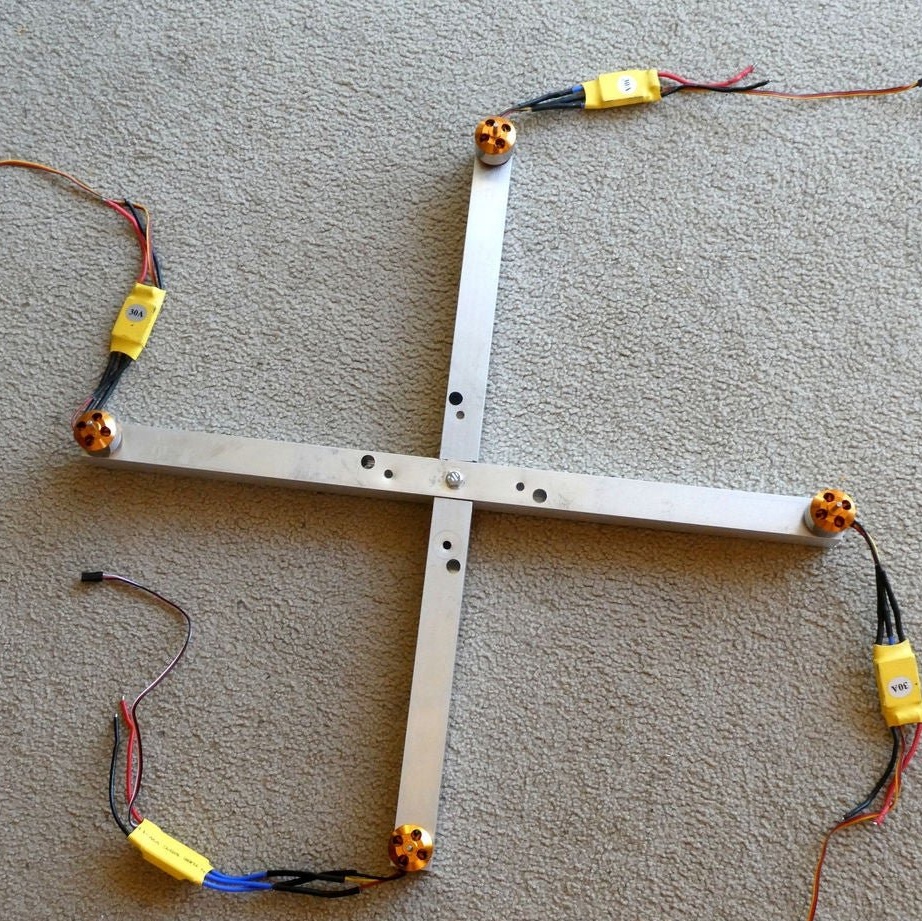
Nu skal du montere motorerne på rammen. Det er absolut nødvendigt at anvende en gevindlås på fastgørelsesskruerne, ellers skrues skruerne løs, og motorerne flyver væk.
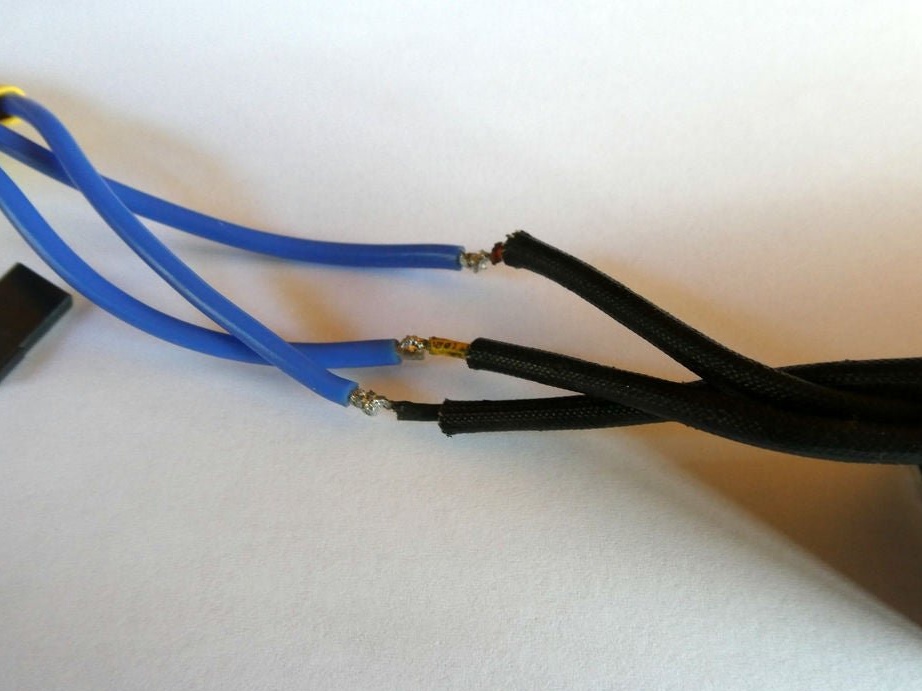
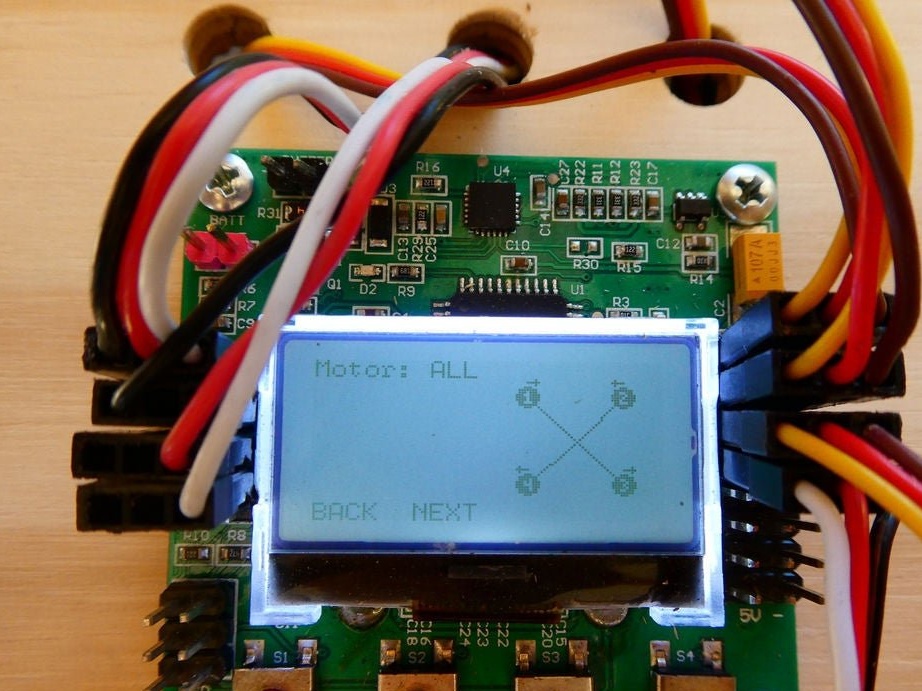
Tilslut ESC til motorerne, så den øverste venstre motor roterer med uret, den øverste højre motor roterer mod uret, den nederste højre motor roterer med uret, og den nederste venstre motor roterer mod uret. Skift to af de tre ledninger for at ændre motorernes rotationsretning. Isoler forbindelserne.
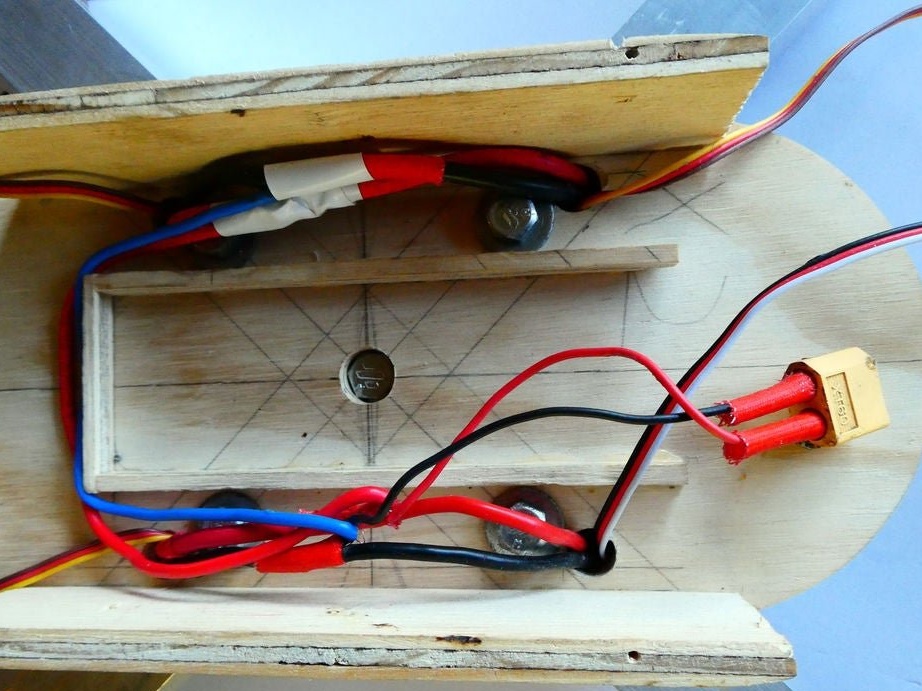
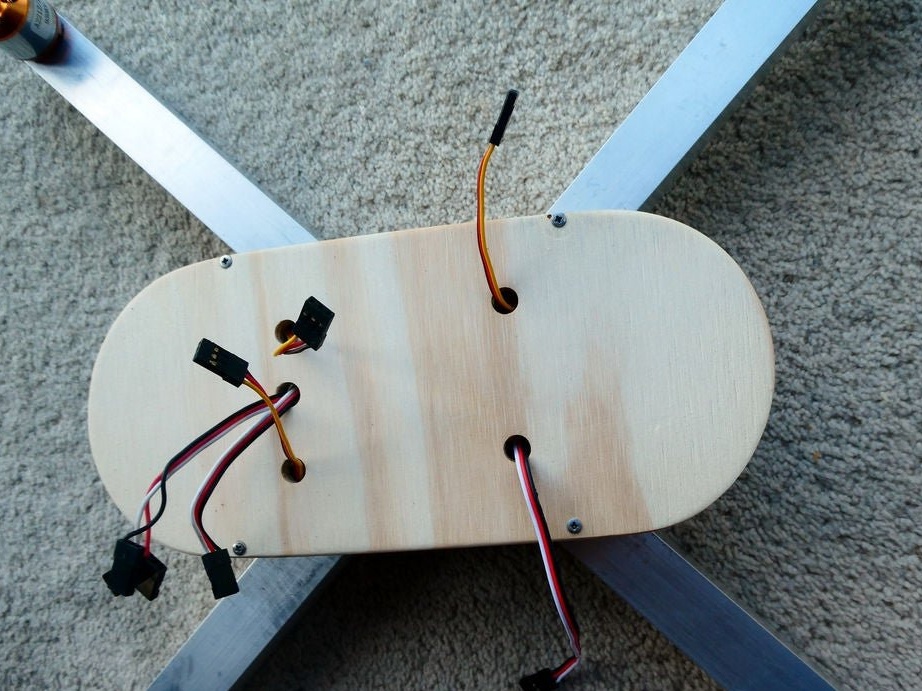
Træk ledningerne gennem rammen og træk ind i hullet, ESC er fast i rørets rør.

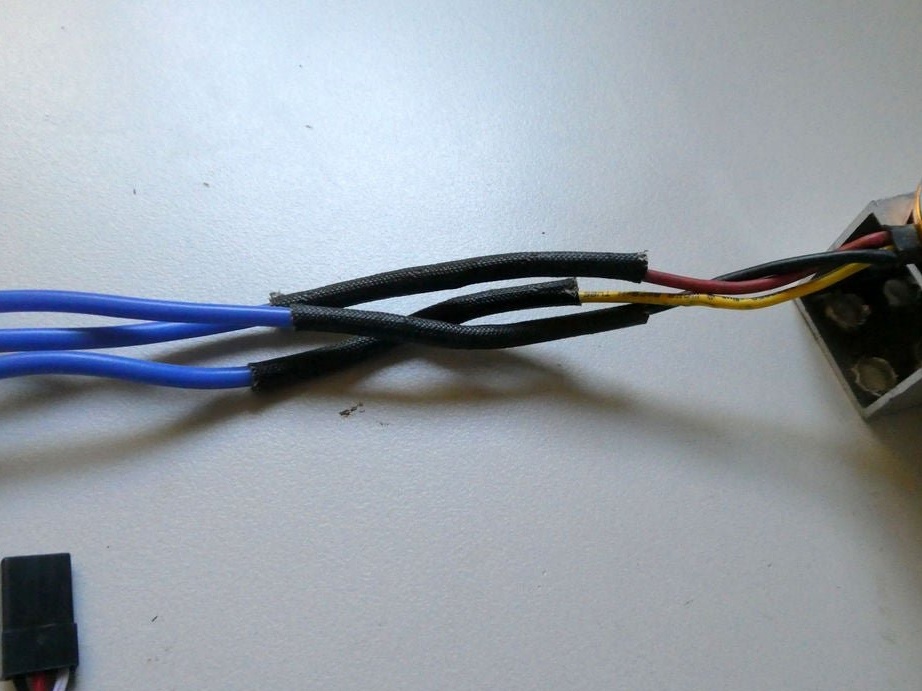
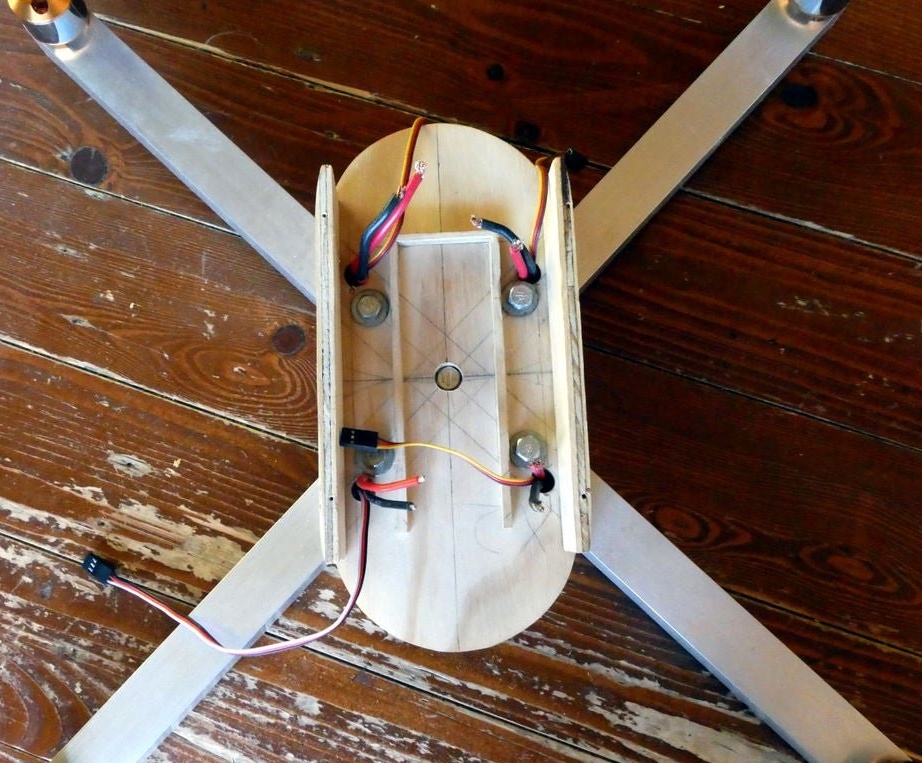
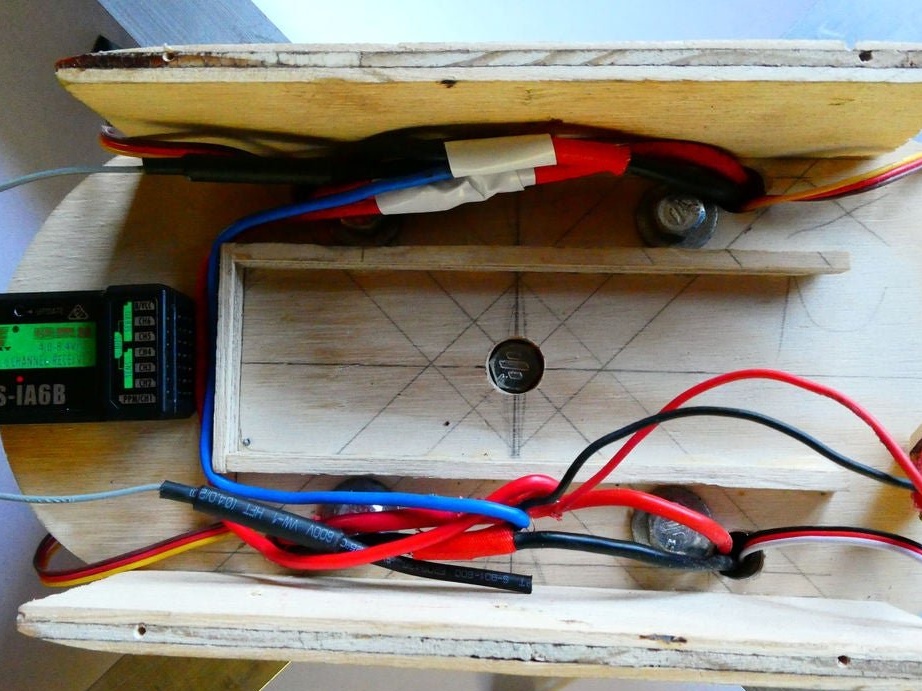
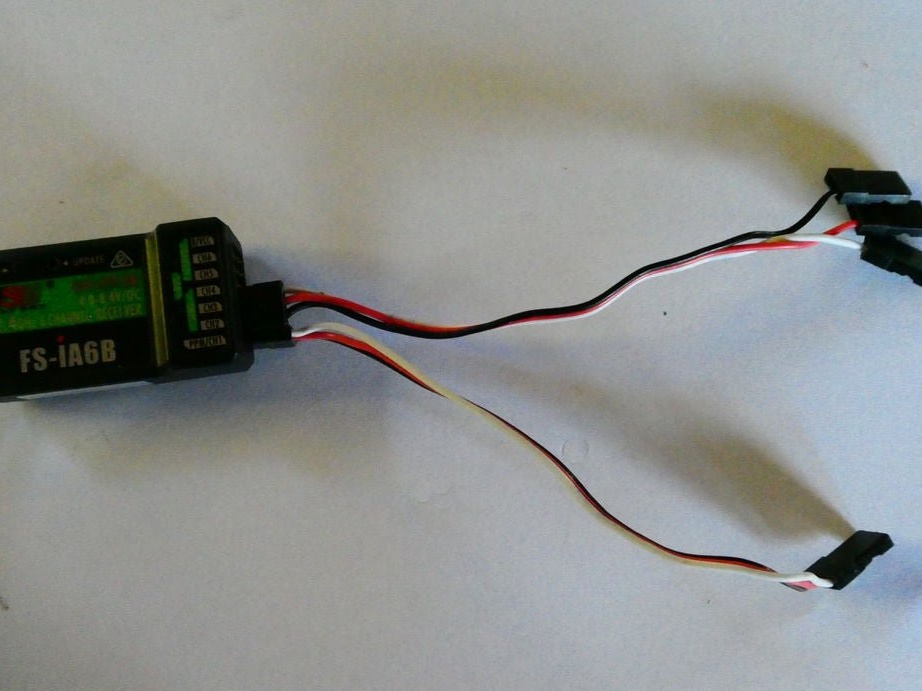
Forbind alle sorte (minus) og alle røde (plus) ledninger sammen. Lodde de to ledninger til XT60-stikket (rød og sort). Fastgør modtageren til chassiset ved hjælp af dobbeltsidet bånd.
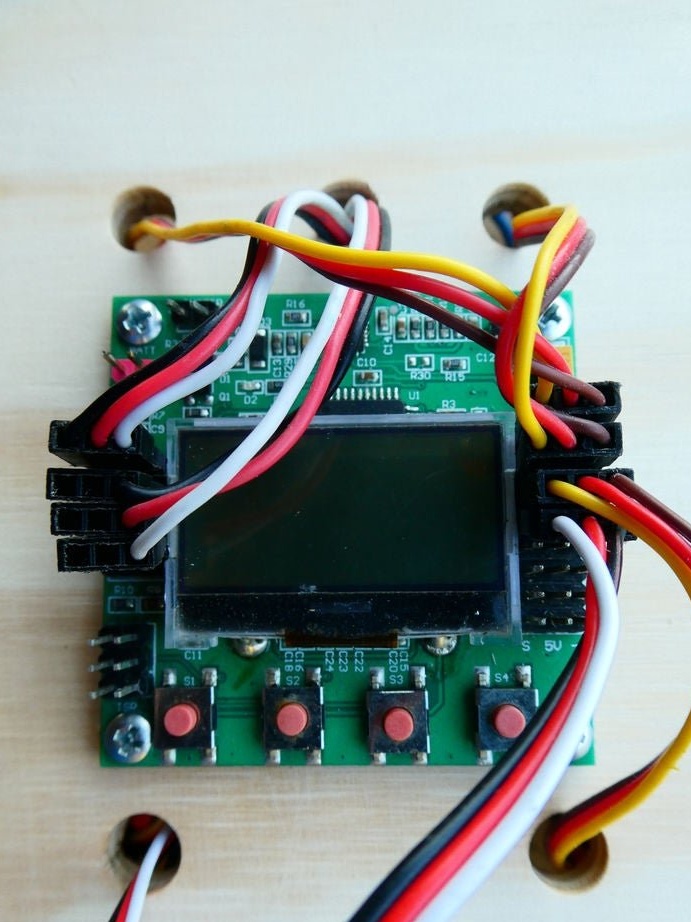
Træk ledningerne fra controlleren og modtageren gennem hullerne i rumdækslet, og skru derefter dækslet. Skru regulatoren til dækslet. Tilslut ledningerne til styringskortet.
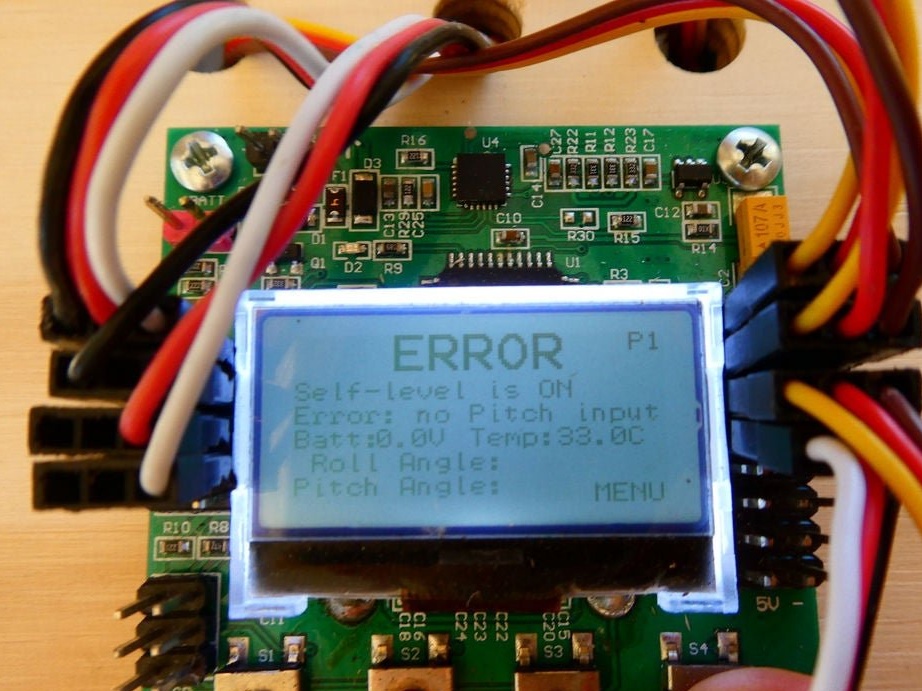
Trin fire: Opsætning
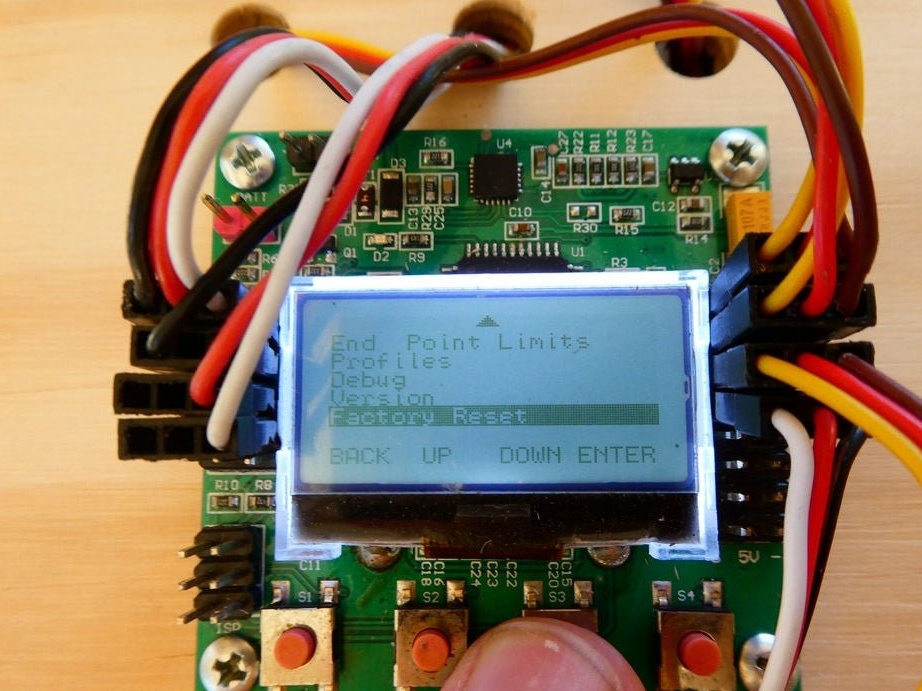
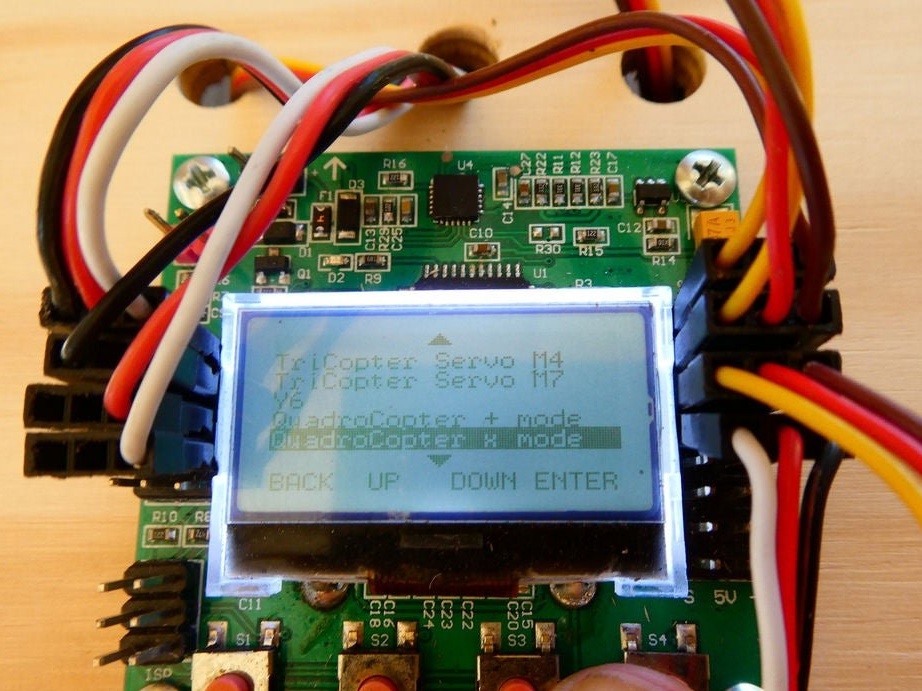
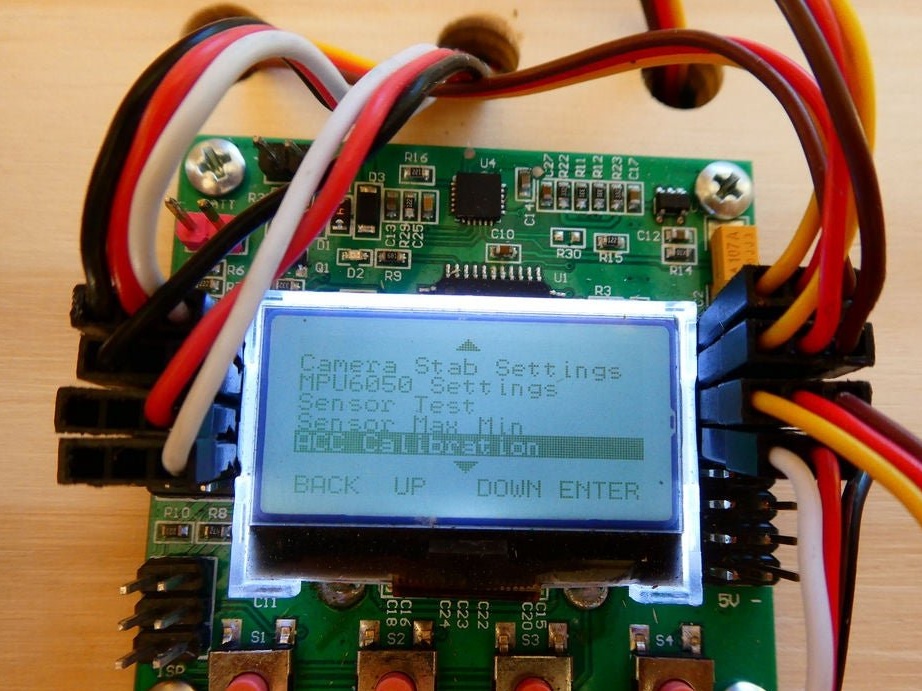
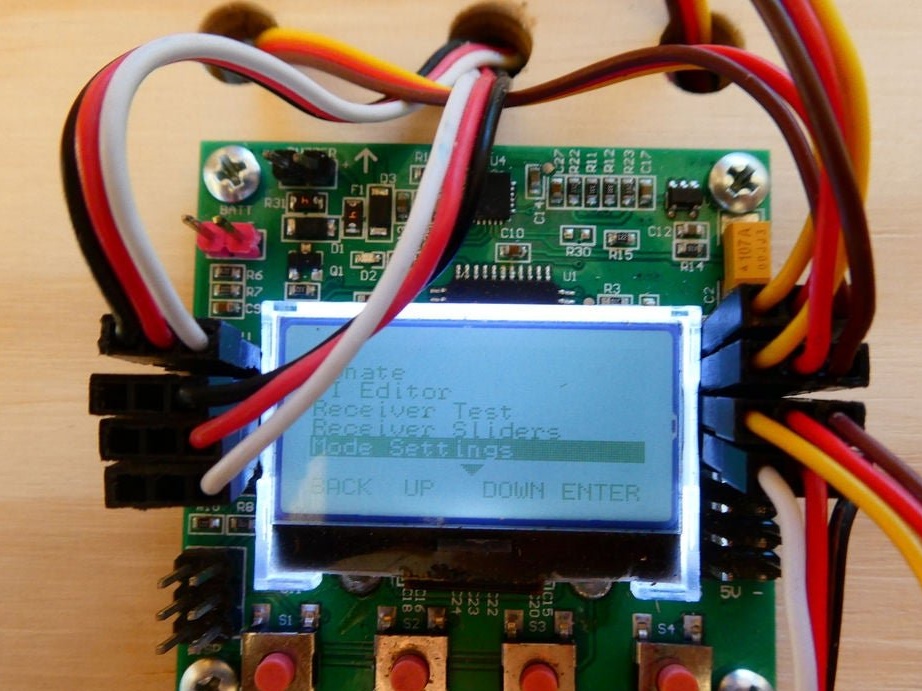
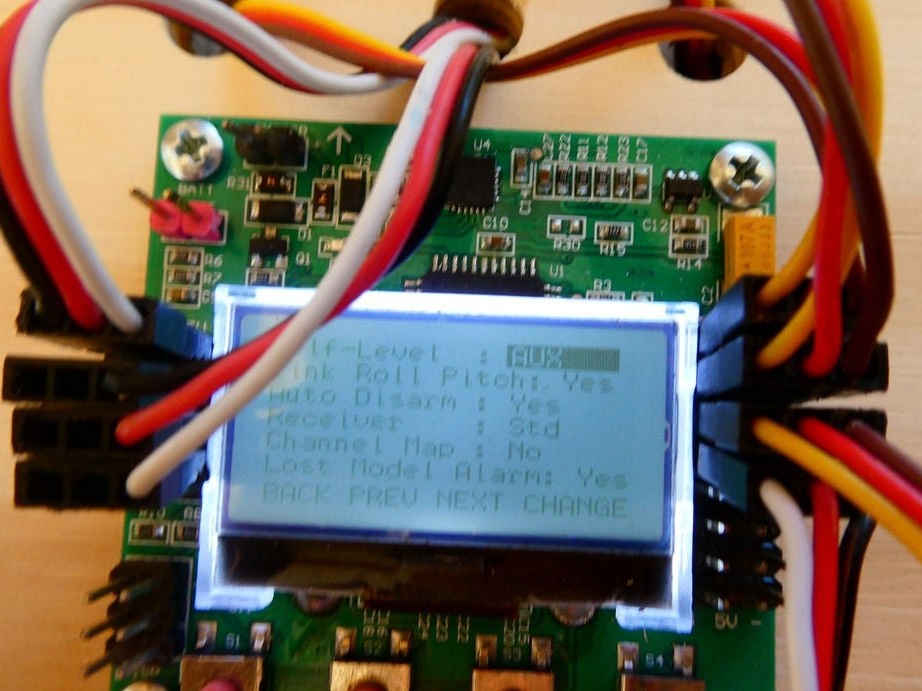
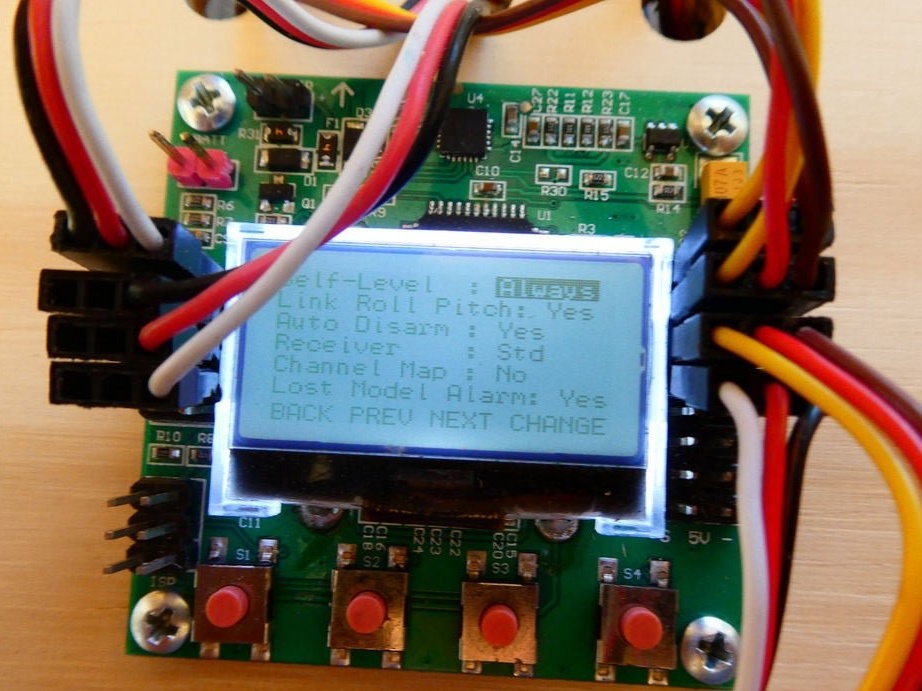
Tilslut batteriet, og controlleren skal starte. Der skal vises en fejlmeddelelse på displayet. Ignorer det, og tryk på menuknappen. Rul ned og klik på "nulstil." Derefter skulle en menu vises for at vælge den ønskede ramme for droner. Rul ned, indtil du kommer til Quadcopter-X-tilstand, og tryk på "accept". Tryk tilbage og vælg "AUX-kalibrering." Placer dronen på en plan overflade, og tryk på "kalibrer." Når dette er gjort, skal du rulle op til modeindstillingerne og ændre autoniveauet fra "AUX" til "Always".
Sluk for batteriet, tænd for controlleren, og tilslut derefter batteriet igen. Flyvelederen skal tænde og vise SAFE. Flyt til venstre til venstre hjørne, og displayet skal skifte fra SAFE til ARMED,
Trin fem: Propeller
Fastgør skruerne på motorakslerne.


Alt er klar. Og endelig et par tip fra mesteren.
Først kan quadrocopter synes at være vanskelig at kontrollere. Den bedste måde at starte en flyvning er at klatre omkring 1 meter over jorden og flyve frem og tilbage, venstre og højre, og derefter starte en quadcopter i en cirkel. Quadcopter kan ikke lide "skure" -flyvning, så lær at fungere problemfrit.
Begynd at flyve, og hold bagsiden af dronen vendt mod dig, så du altid ved det.
Kulstoffiberskruer er stærkere end plastskruer og bryder ikke sådan.


