


I cirklen af raketmodeller til denne knude er det sædvanligt at bruge udtrykket avionik - avionik. Jeg forstår ærligt ikke rigtig hvorfor. I det overvældende flertal af tilfælde er noden kun ansvarlig for at udløse redningssystemet, hvis det er køligere, registrering af flydata og videooptagelse. Men begrebet luftfart har en klar definition: "Luftforsvaret har historisk udviklet en klar opdeling af flyudstyr (fly) til luftfart (AEC), for sit arbejde udsender og / eller modtager radiobølger) og luftfartsudstyr (AO). De fleste AO-systemer indeholder også elektronisk komponenter og komponenter, men bruger ikke radiobølger under deres drift. "
Baseret på disse definitioner ville det være meget mere logisk at bruge udtrykket luftfartsudstyr eller simpelthen luftfart. Men luftfart så avionik.
Baseret på disse definitioner ville det være meget mere logisk at bruge udtrykket luftfartsudstyr eller simpelthen luftfart. Men luftfart så avionik.
Der er mange variationer og løsninger til denne opgave: timere, hvor faldskærmen skubbes ud efter en bestemt tid, der beregnes før flyvningen, optiske vippesensorer (LED). Men på grund af det faktum, at vi lever i et samfund og tid, hvor avancerede digitale teknologier er tilgængelige for alle, har smarte kredsløb, der er i stand til at måle højden, vundet udbredt brug. Sådanne ordninger er bygget på basis af højdemålere (højdemålere), det er også en barometrisk tryksensor. Som jeg tror, alle ved, at atmosfæretrykket er forskelligt afhængigt af højden. Det er grunden til, at bjergene har et lavere kogepunkt for vand, og ekspeditionsmedlemmer kan opleve iltesult. Under almindelige levevilkår er en person ikke i stand til at fange forskellen i atmosfærisk tryk, disse enheder er også i stand til at registrere ændringer i bogstaveligt talt 10 centimeter!
Det er et af disse enheder, som jeg vil beskrive i dag. Uden en samvittighedstram indrømmer jeg, at ordningen ikke er min. Forfatteren af enheden er den franske raketmodeller Boris Duro (jeg håber korrekt oversat til russisk).
Dette er den "yngste" enhed, som Boris har foreslået, ikke desto mindre har den tilstrækkelig funktionalitet til en vellykket start. Lad os først gå igennem hans arbejde. Efter tændingen er enheden fastgjort til terrænet, kontrollerer sikringenes integritet og udsender et signal: intermitterende kort - i rækkefølge, intermitterende lang - beskadiget. Signalet vil lyde før start, uanset sikringens funktionsdygtighed / funktionsfejl efter start, kredsløbet begynder at måle højden.Start anses for at være en højde på mere end 20 meter, når apparatet når apogee, aktiverer enheden sikringen og roterer kontinuerligt apogeehøjden i en cirkel ved hjælp af en enkel ciffer. Det ser sådan ud: et langt signal - 100 meter, et kort 10 meter. Det vil sige, lad os sige, at enheden udsender 5 lange og 3 korte signaler, hvilket betyder, at apogeehøjden er 530 meter. Denne "meddelelse" roterer, indtil enheden er slukket. Data gemmes ikke i hukommelsen, og efter tænding starter hele cyklussen på ny. Ja, denne enhed registrerer ikke flydata som mange af dens analoger, men for de første flyvninger er dette mere end egnet mulighed. Derudover er kredsløbet, der er lavet på plane komponenter, så lille, at det er let at montere selv i de mindste børnenes raket.
Dette er den "yngste" enhed, som Boris har foreslået, ikke desto mindre har den tilstrækkelig funktionalitet til en vellykket start. Lad os først gå igennem hans arbejde. Efter tændingen er enheden fastgjort til terrænet, kontrollerer sikringenes integritet og udsender et signal: intermitterende kort - i rækkefølge, intermitterende lang - beskadiget. Signalet vil lyde før start, uanset sikringens funktionsdygtighed / funktionsfejl efter start, kredsløbet begynder at måle højden.Start anses for at være en højde på mere end 20 meter, når apparatet når apogee, aktiverer enheden sikringen og roterer kontinuerligt apogeehøjden i en cirkel ved hjælp af en enkel ciffer. Det ser sådan ud: et langt signal - 100 meter, et kort 10 meter. Det vil sige, lad os sige, at enheden udsender 5 lange og 3 korte signaler, hvilket betyder, at apogeehøjden er 530 meter. Denne "meddelelse" roterer, indtil enheden er slukket. Data gemmes ikke i hukommelsen, og efter tænding starter hele cyklussen på ny. Ja, denne enhed registrerer ikke flydata som mange af dens analoger, men for de første flyvninger er dette mere end egnet mulighed. Derudover er kredsløbet, der er lavet på plane komponenter, så lille, at det er let at montere selv i de mindste børnenes raket.
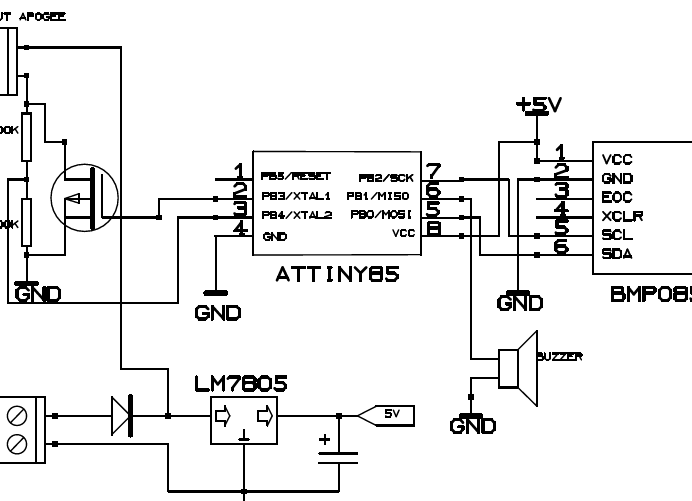
Over kan du observere enhedens kredsløbsdiagram. Ordningen blev taget fra Boris websted, men det er værd at bemærke, at det har en overhøjde, der kan være vildledende. Diagrammet viser en grafisk betegnelse af en p-kanals felteffekttransistor, når der faktisk bruges en n-kanal. Hvilken transistor er ikke vigtig at bruge, enhver højstrøms n-kanal.
Til fremstilling har du brug for:
- BMP180 Barometer Modul
- Attiny 85 mikrokontroller
- Elektrolytisk kondensator 47 mF, 16 V
- 100 kΩ og 2 kΩ modstande
- 78L05 stabilisator i TO92-boliger eller tilsvarende i SMD
- Transistor med høj strømfeltvirkning IRF540 / IRFZ44 eller tilsvarende i SMD-version
- Puder til ledninger 2 stk.
- 5 V aktiv summer
- Diode 1N4001 eller 1N4007. Valgfrit er det en beskyttelse mod forbrug.
- textolite
Fra værktøjet:
- Loddejern
- pincet
- Sideskærere
- lodde
- flux
- USBasp-programmerer
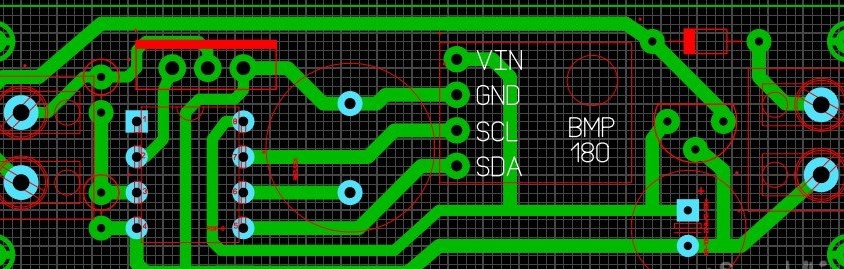
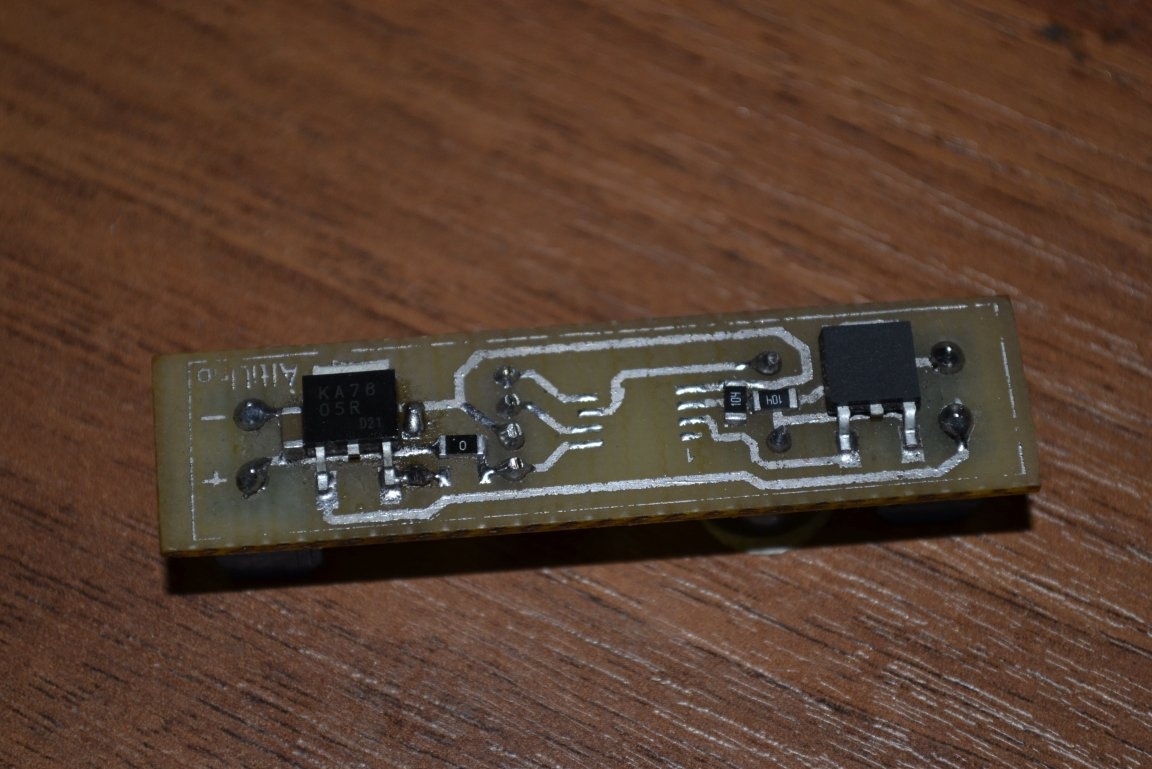
I arkivet herunder er to filer på kredsløbskortet, til SMD-komponenter og til konventionelle udgangsforbindelser. Jeg må med det samme sige, at jeg ikke indsamlede det andet bord, jeg gjorde det i SMD, men for dem, der af en eller anden grund ikke kan lodde små plane komponenter, lavede jeg et spor for almindelige komponenter. Ikke desto mindre kontrollerede jeg flere gange, det skulle være fejlfrit.
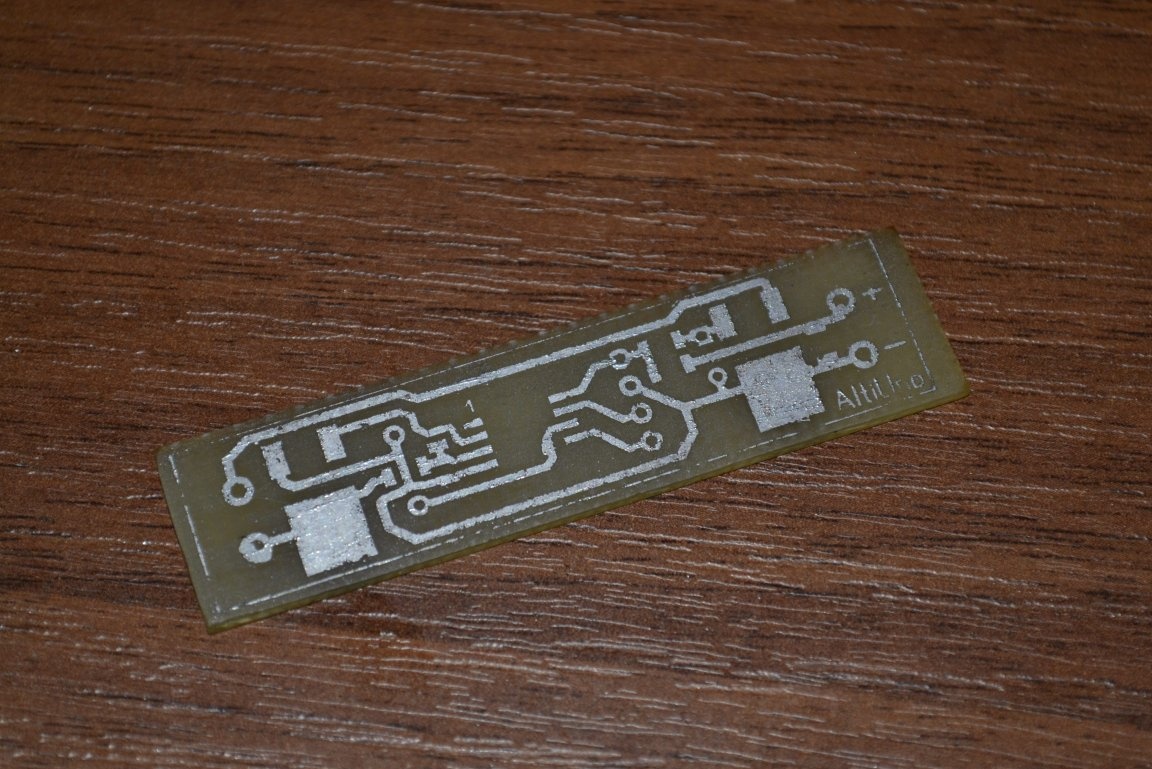
Og så er den første ting, vi gør, at lave et printkort. Jeg gjorde som sædvanligvis LUT.
Og lodde alle SMD-komponenter undtagen controller.
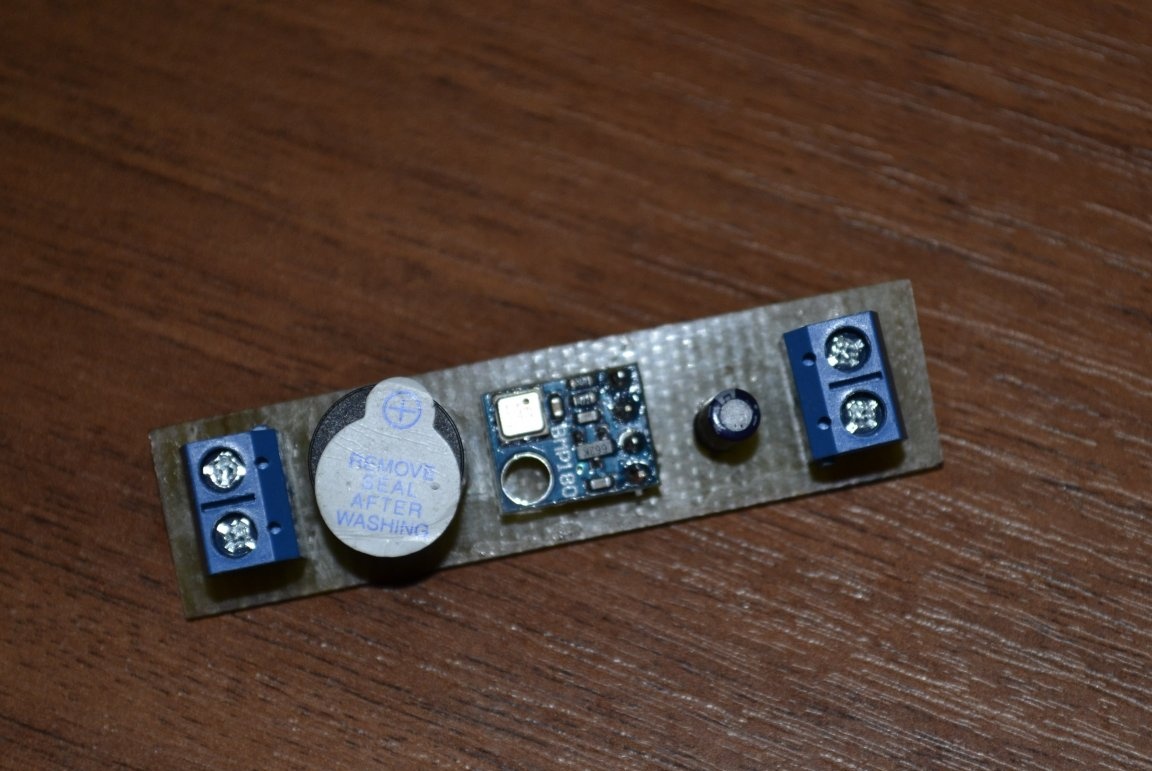
Lod derefter summer, sensor, puder og kondensator.
Nu skal du blinke controller. Firmwaren til dette kredsløb er skrevet i Arduino-miljøet, så du er nødt til at udfylde Arduino bootloader i controlleren. Dette gøres via USB ASP-programmereren direkte under selve arduino-programmeringsmiljøet. Først og fremmest skal du forbinde controlleren til selve programmøren. Forbindelsesdiagrammet er nedenfor.

For at tilslutte controlleren i SMD-version kræves en adapter.

Filen med det trykte kredsløb findes også i arkivet i slutningen af artiklen. Lad os nu gå videre til softwareforbedringer. Først skal du få venner Arduino IDE med Attiny 85, fordi denne controller ikke er understøttet af boksen. For at gøre dette ved ... / Arduino / hardware skal du oprette en lille mappe, hvor indholdet af arkivet kan placeres med kernerne. Du kan downloade arkivet dette linkDownload den nyeste version. Nu vil miljøet kunne se controlleren. Vi forbinder programmereren, åbner arduino-miljøet, går til og sætter USBasp.
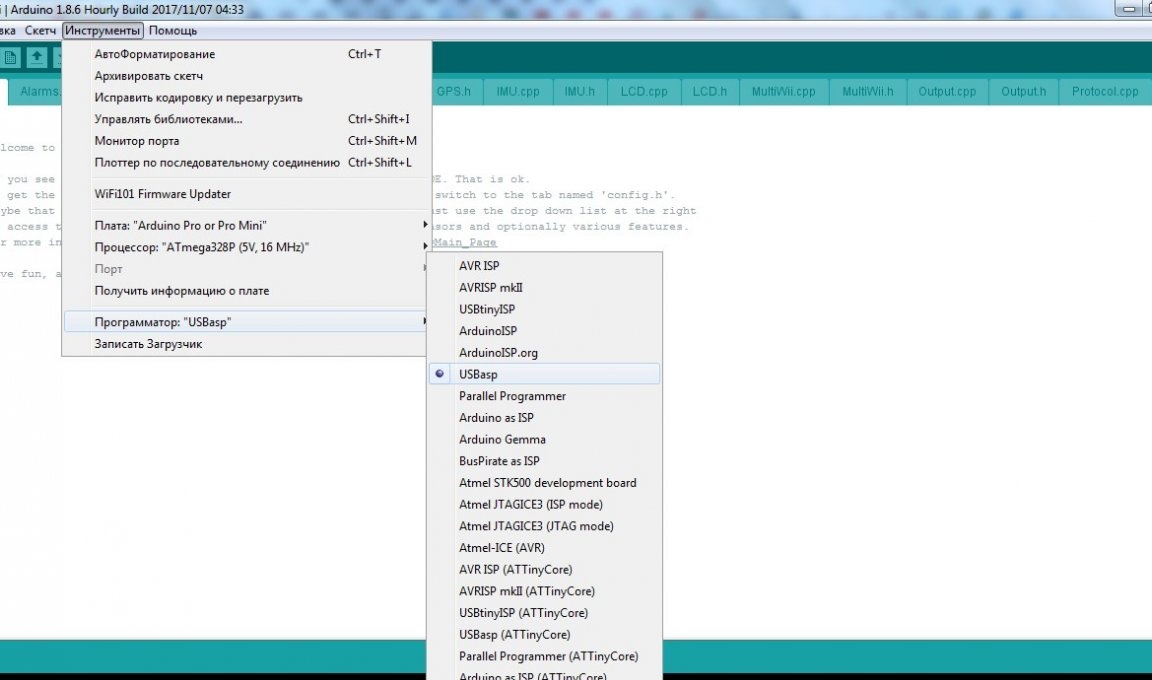
Vælg nu ATtiny25 / 45/85.
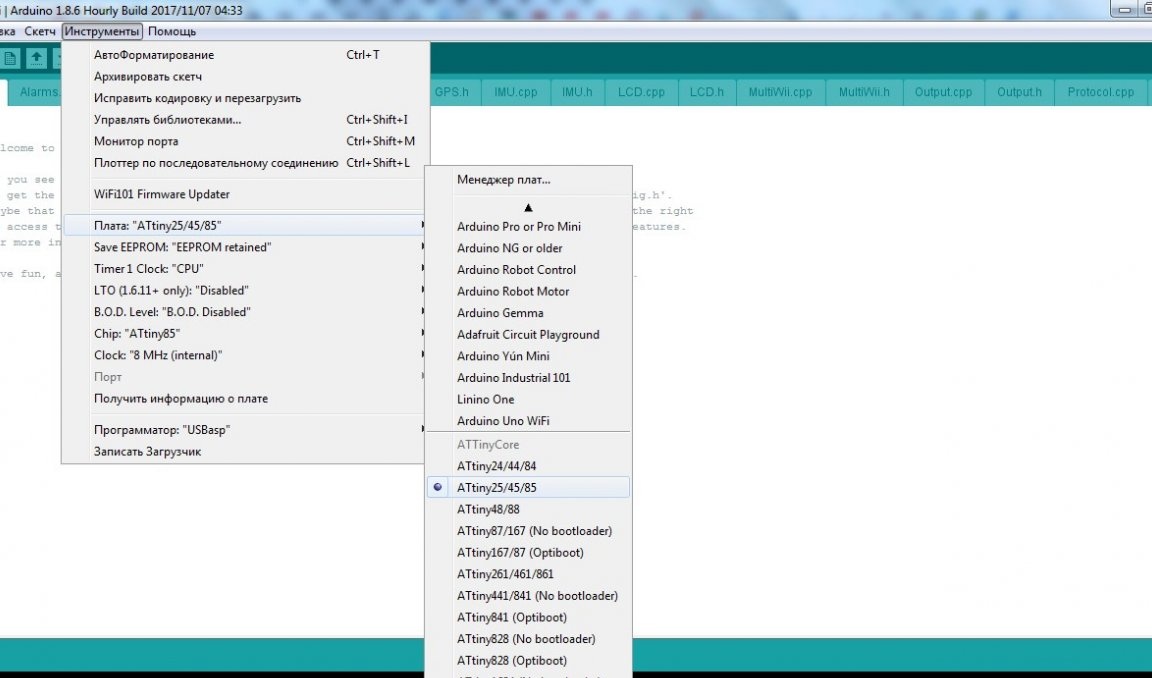
Vi ser ud til, at ATtiny85 ville stå i Chip. Klik nu alle i de samme værktøjer. Hvis alt gøres korrekt, er der ingen problemer med kontakten, der er ingen problemer med driverne, og miljøet rapporterer en vellykket optagelse. Et stort plus i denne firmware er, at du ikke behøver at bekymre dig om sikringer, Arduino-miljøet vil gøre alt selv. Så du dræber ikke controlleren. Derefter kan du udfylde skitsen. Skitse hældes næsten på samme måde som sædvanligt, men i stedet for den sædvanlige knap skal du gå til. Det er alt, nu kan du lodde en tink i brættet.

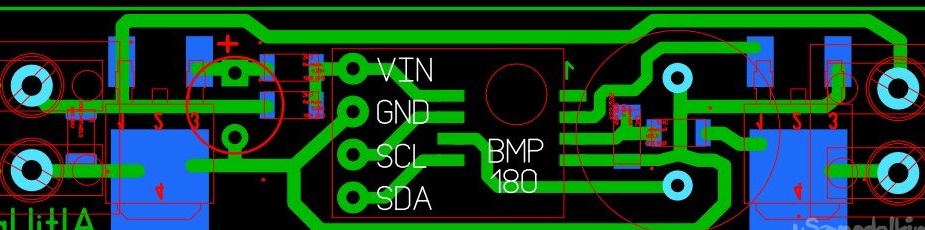
Lad os nu gå videre til funktionerne på mit printkort. Jeg lavede et avionikrum til installation af et 18650 batteri i det.Som du ved producerer et fuldt opladet enkeltbanks li-ion-batteri 4,2 volt, den nedre tærskel for forsyningsspændingen for Attiny 85 er 2,7 volt, det kritiske udladningsniveau for et sådant batteri, det er, som du forstår, strømmen er nok. MEN! Kun hvis du bruger strøm direkte ved at omgå stabilisatoren. Jeg begyndte ikke at fjerne stabilisatoren fra kredsløbet for at gøre det mere universelt, selvom det ikke er involveret i mig. Og så er der fem på brættet for to modstande.
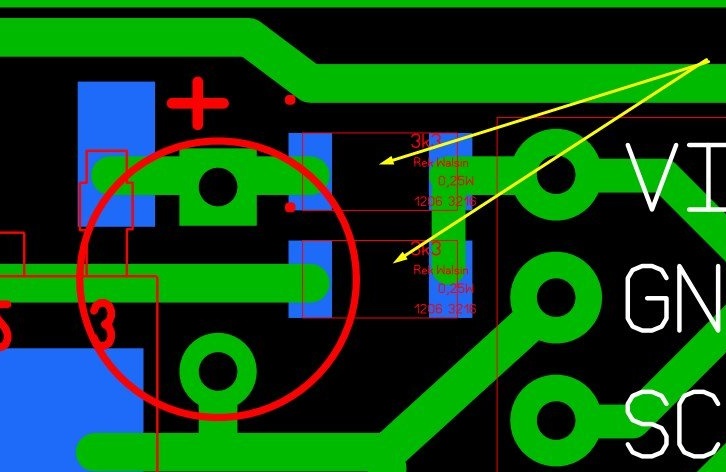
Dette er ikke rigtig modstande. På et par af disse hæle skal du lodde en jumper, den såkaldte nulmodstand (du kan dumt et stykke tråd). Hvis du, som jeg, vil føre kredsløbet fra en sådan strømkilde, så loddes til de nedre kontakter, hvis du ser på billedet, hvis du agter at bruge for eksempel en krone, så til den øverste, til output fra stabilisatoren. På det trykte kredsløbskort er faktisk alt synligt, hvad og hvor går.
På tavlen til outputkomponenter er denne mulighed ikke tilgængelig. Du kan enten færdiggøre signet selv, tilføje for eksempel et par jumpere, eller bare ikke lodde stabilisatoren og lodde jumperen.
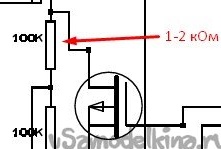
En anden nuance. Når det drives af et batteri med en spænding på 4,2 volt, kan det ske, at transistoren konstant er åben. Som du kan se på diagrammet, er der en skillelinje mellem afløbet og kilden. For at løse problemet skal du udskifte en af modstande med 1-2 kOhm. Hvilken er vist nedenfor.
På tavlen til outputkomponenter er denne mulighed ikke tilgængelig. Du kan enten færdiggøre signet selv, tilføje for eksempel et par jumpere, eller bare ikke lodde stabilisatoren og lodde jumperen.
En anden nuance. Når det drives af et batteri med en spænding på 4,2 volt, kan det ske, at transistoren konstant er åben. Som du kan se på diagrammet, er der en skillelinje mellem afløbet og kilden. For at løse problemet skal du udskifte en af modstande med 1-2 kOhm. Hvilken er vist nedenfor.
Nu til firmwaren. Der er 2 firmwares i arkivet, den vigtigste til at udløse den elektriske sikring i redningssystemet og en alternativ. Alternativ firmware giver dig mulighed for at bruge kredsløbet som et lydsøgningsfyr. Da kredsløbet er meget kompakt, kan det anbringes i raketens hovedmuffe ved at vælge en kompakt strømkilde. For at gøre dette, i stedet for en sikring, er en stærk piezo-emitter forbundet til kontakterne, svarende til den, der er vist nedenfor.

Nogen vil sige, hvorfor der på brættet er en summer. Ja, men uanset hvor højt det kan synes for dig under test i rummet, kan du faktisk høre et loft på omkring 20 meter i marken. Generelt er søgemaskiner til modeller et helt episk. I fremtidige planer har jeg en samling af GPS-fyr, som bestemmer koordinaterne og sender dem i luften. Koordinater modtages på en bærbar radiostation (walkie-talkie), og ved hjælp af en hvilken som helst telefon (alle har nu en GPS-navigator) søges der efter en model. Men det er i planerne, vi vil vende tilbage til virkeligheden.
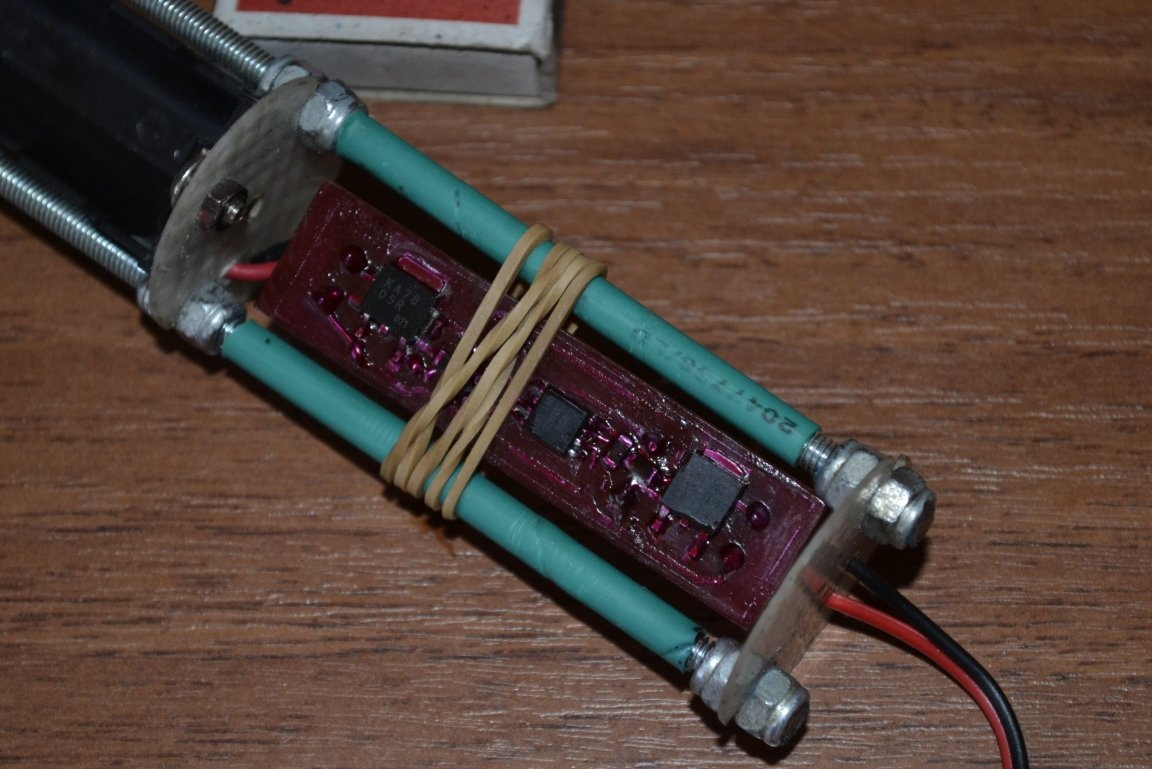
Selvom der i princippet ikke er noget særligt at vende tilbage til. Der er lavet et specielt chassis til brættet, takket være hvilket det er monteret i en raket. Chassiset er lavet specielt til dit modellen. Jeg lavede det fra de tyndeste hårnåle, som jeg kunne købe i en byggebutik, og stykker hjemmelavet glasfiber.
Selvom der i princippet ikke er noget særligt at vende tilbage til. Der er lavet et specielt chassis til brættet, takket være hvilket det er monteret i en raket. Chassiset er lavet specielt til dit modellen. Jeg lavede det fra de tyndeste hårnåle, som jeg kunne købe i en byggebutik, og stykker hjemmelavet glasfiber.

Brættet er fastgjort til chassiset på almindelige gummibånd til papirvarer. Det er let at installere og fungerer som en støddæmper, så sensoren ikke bliver skør.
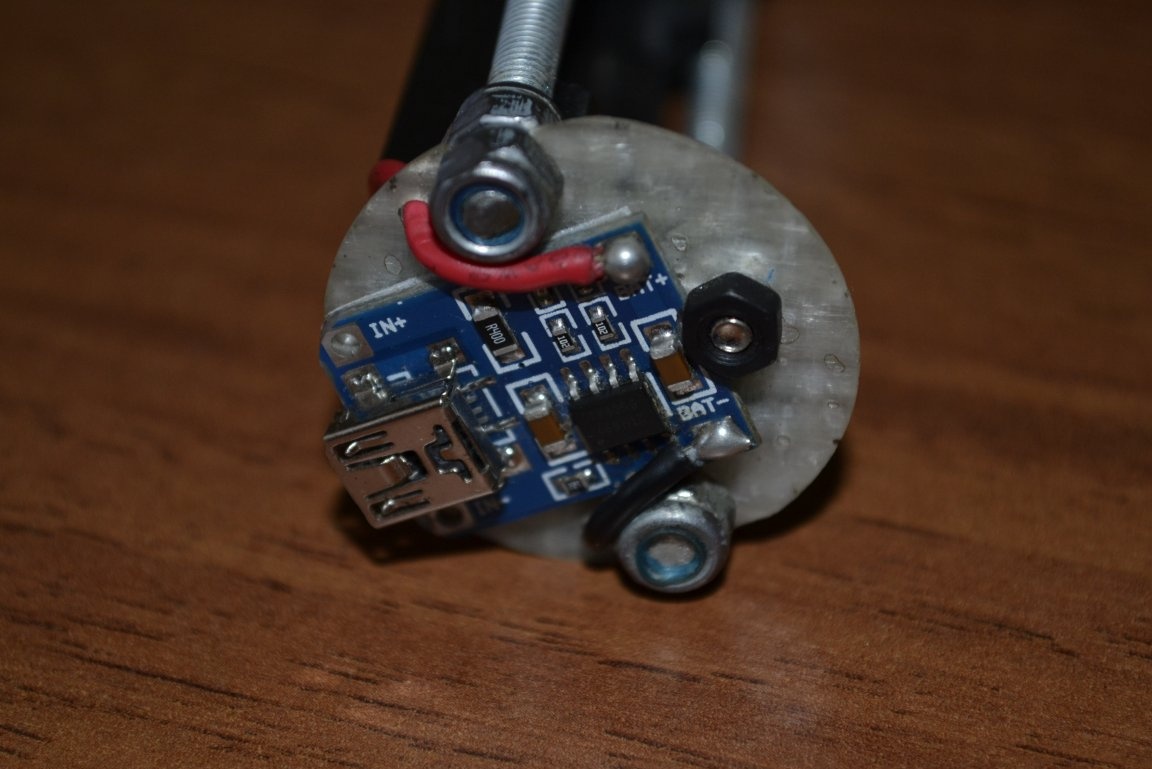
Som du kan se brættet fra siden af sporene, jeg malede deprimeret neglelak, så at sige større beskyttelse. Fra slutningen af chassiset besluttede jeg at vedhæfte et opladningsmodul, jeg købte et par dusin på Ali, de koster som frø, så det er ikke synd.
Et par ord om bekræftelsen. Vi tager en krukke (sådan at kredsløbet med strøm passer) og et nylonafdækning. Vi laver et hul i låget og sætter røret fra dropperen hermetisk ind i det. Den anden ende af røret er forbundet til en sprøjte med terninger på 20. Vi sætter enheden i en krukke, lukker og pumper luften ud med en sprøjte. Efter at vi leverer luft tilbage.
Den anden mulighed. Efter råd fra en velkendt modellerer. Vi tager et rør fra en slikkepind, en stang af en pen, en ørepind. Vi vinder flere lag elektrisk bånd i enden, så det elektriske bånd strækker sig ud over røret et par millimeter. Klip forsigtigt med en skarp monteringskniv af sårrørets kant, hvilket ville være jævnt. Vi påfører det jævnt på hullet på selve sensoren og trækker luften skarpt ud med vores mund. Primitivt, men det fungerer.
Den anden mulighed. Efter råd fra en velkendt modellerer. Vi tager et rør fra en slikkepind, en stang af en pen, en ørepind. Vi vinder flere lag elektrisk bånd i enden, så det elektriske bånd strækker sig ud over røret et par millimeter. Klip forsigtigt med en skarp monteringskniv af sårrørets kant, hvilket ville være jævnt. Vi påfører det jævnt på hullet på selve sensoren og trækker luften skarpt ud med vores mund. Primitivt, men det fungerer.
Og et par ord, for dem, der har et spørgsmål, hvordan bestemmes klimaks. I alle sådanne enheder implementeres dette på samme måde. Når du flyver, sammenlignes den aktuelle højde konstant med den foregående. Så snart denne værdi begynder at falde under den foregående (raketten begyndte at falde), fastlægges den af apogen. Men for at der ikke er nogen falske positive betragtninger, anses apogien for at være et raketfald til en bestemt højde, normalt et fald på 3 meter (dette er rettet i koden), men for højere flyvende missiler lægger de mere.
Alle nødvendige filer kan downloades fra.
Det er alt. Video med en plakatdemo nedenfor. Al succes i arbejdet!