

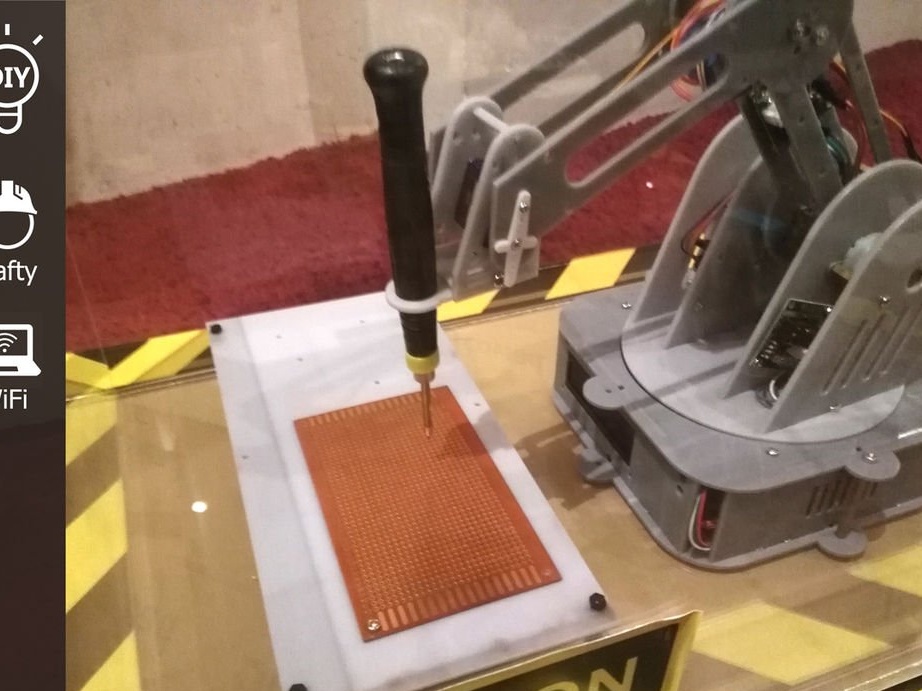

Desværre vil dette materiale ikke trække på en fuldgyldig artikel, derfor besluttede jeg at placere det i "tipene", måske kan nogen have brug for materialet. Artiklen fortæller, hvordan man lodder elektronisk komponenter på et trykt kredsløbskort ved hjælp af en automatiseret manipulatorarm.
Idéen om projektet kom til mesterens tanker tilfældigt, da han studerede forskellige muligheder for robotmanipulatorer og derefter opdagede, at der er flere, der dækker området automatiseret svejsning og lodning af en robotmanipulator.
Værktøjer og materialer:
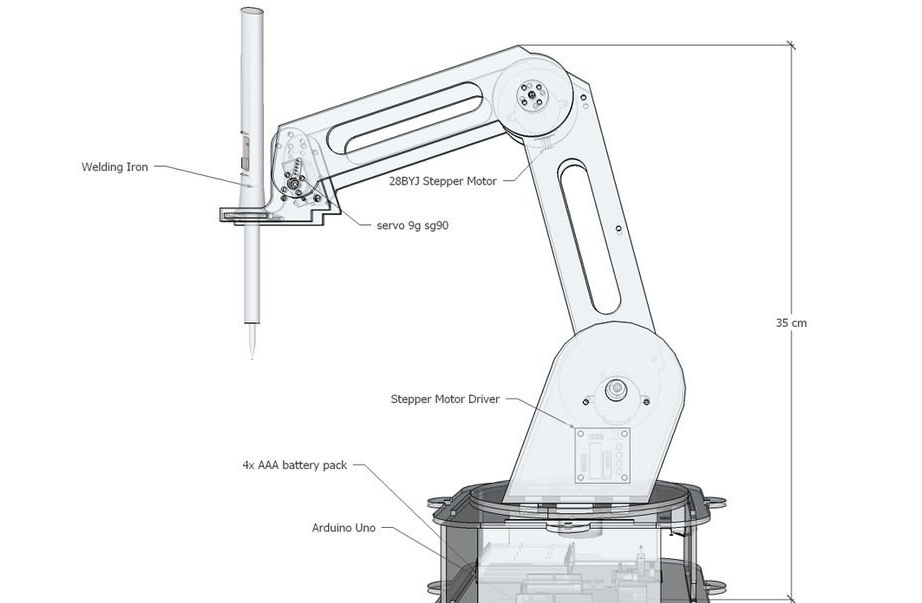
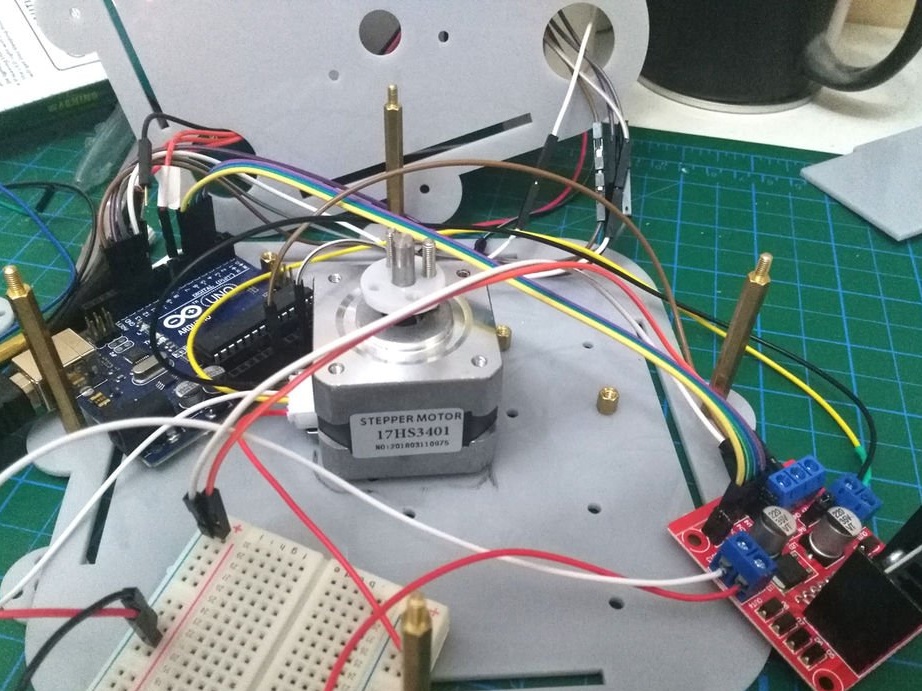
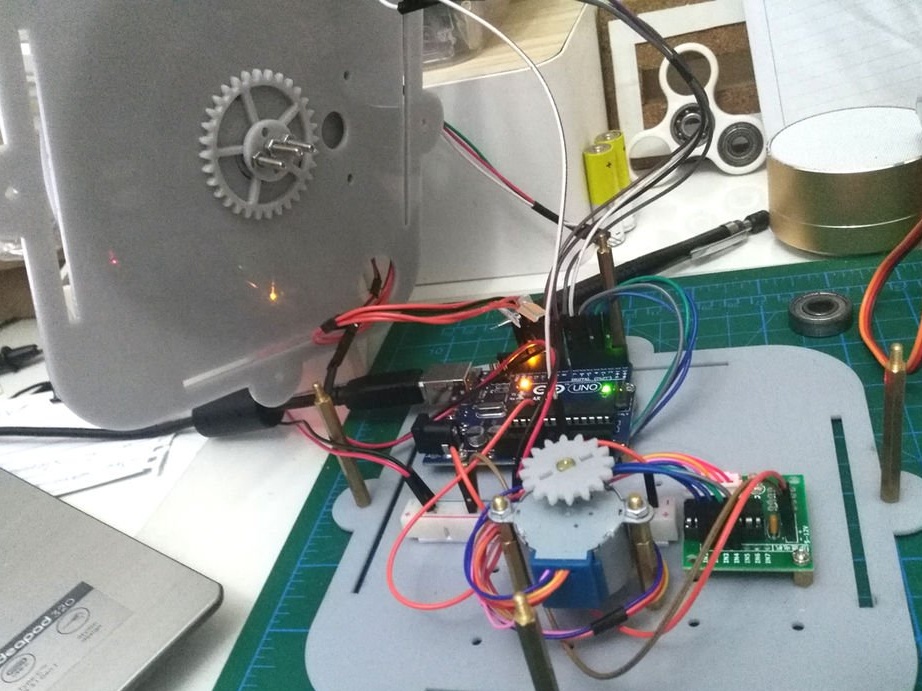
-Stegmotor 28BYJ-48 med drivermodul ULN2003;
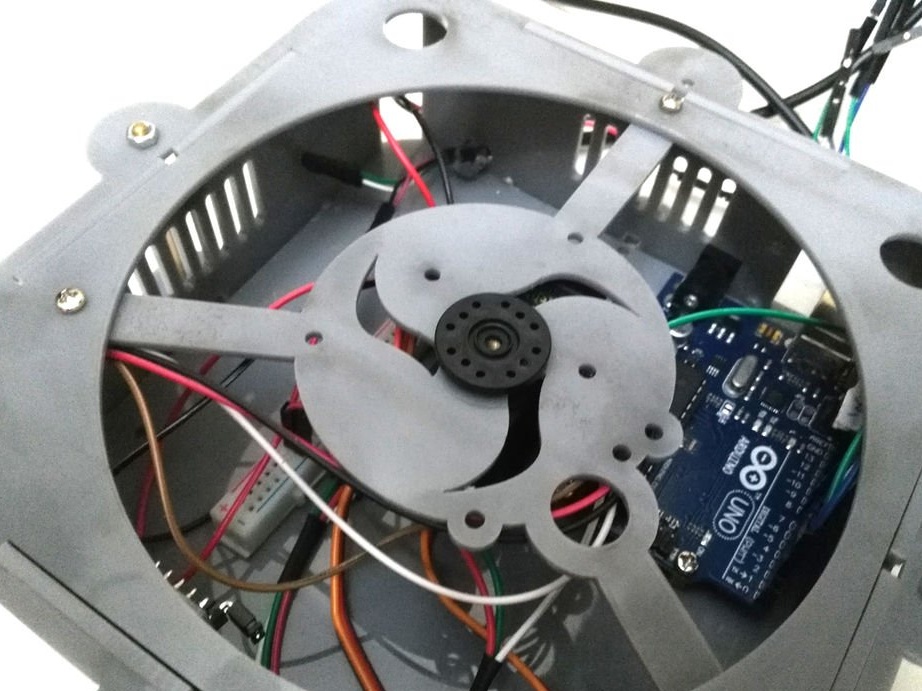
- Arduino Uno R3;
Servomotor MG-90S;
- LCD 1602;
-Maketnaya bord;
- tilslutning af ledninger;
- Sænkningskonverter;
-Servox SC-1252MG $ Servo Drive
-Krepezh;










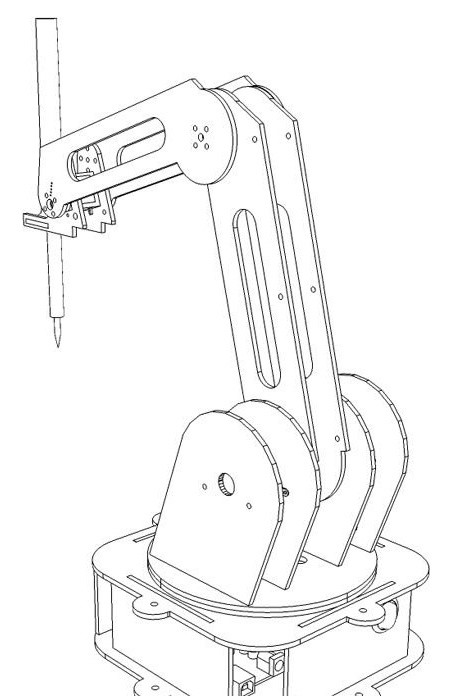
Guiden udviklede først projektet. En del af detaljerne blev skåret ud på en CNC-maskine med en laser.
Efter montering af alle delene dukkede det op en række problemer:
1. Håndtagene var for tunge til, at små trinmotorer kunne styre.
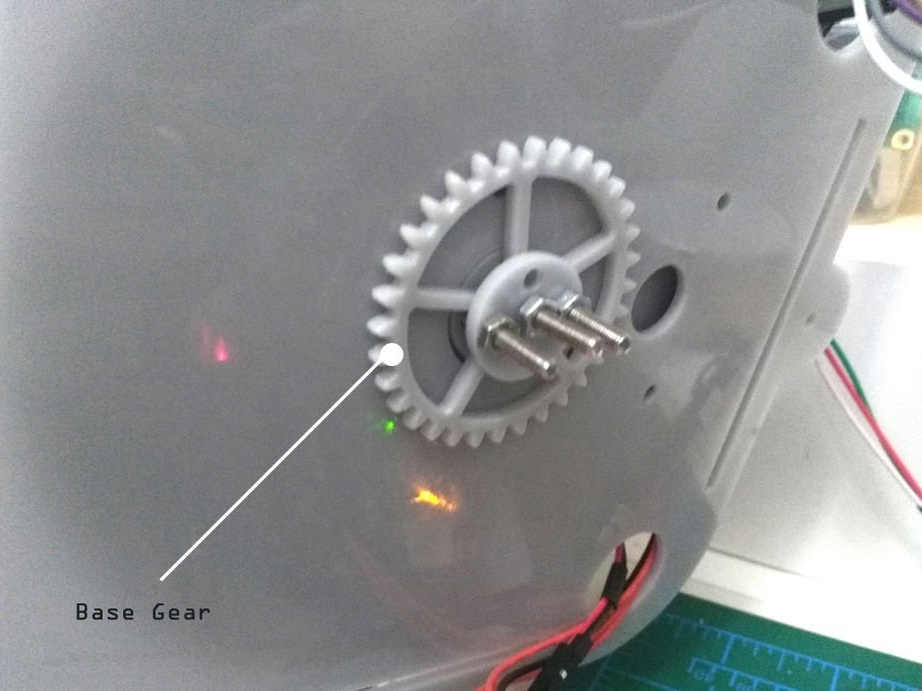
2. Siden modellen var lavet af plastik, friktionen af den roterende base var høj, og bevægelserne var ikke glatte.
Den første løsning var at købe en større trinmotor, der var i stand til at modstå vægt og friktion, og masteren gjorde om basen til installation af en større trinmotor.
Men problemet forsvandt ikke, og så ændrede masteren grundlæggende design fuldstændigt og installerede en servomotor med en gearkasse og metalgear.
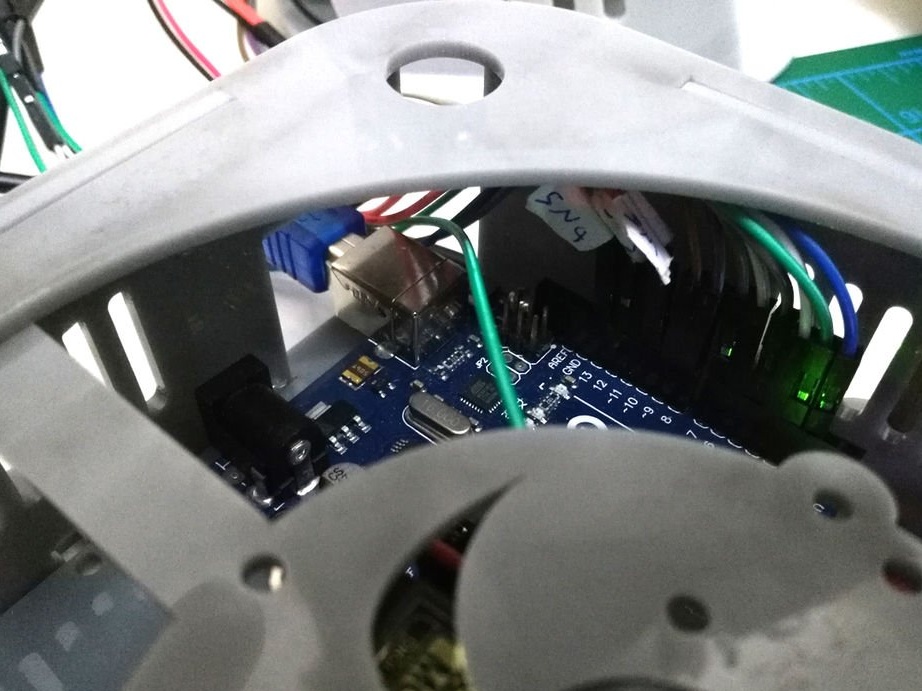
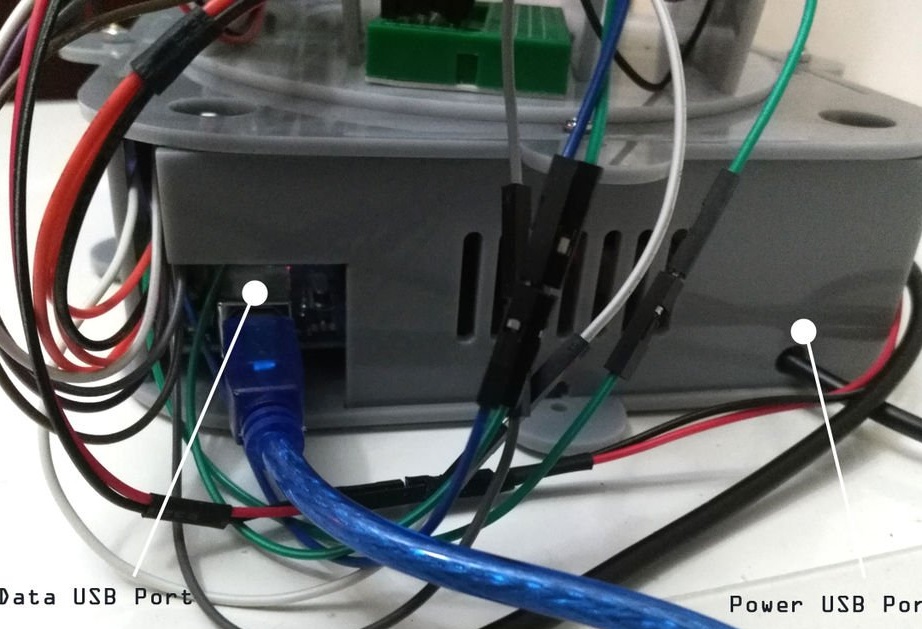
3. Spændingen.
Arduino kan drives enten fra DC-strømstikket (7-12 V), USB-stikket (5 V) eller fra VIN-stiften på kortet (7-12 V). Spændingsforsyningen gennem 5 V- eller 3,3 V-kontakter forbigår regulatoren, og masteren besluttede at købe et specielt USB-kabel, der understøtter 5 V fra en pc eller en hvilken som helst strømkilde.

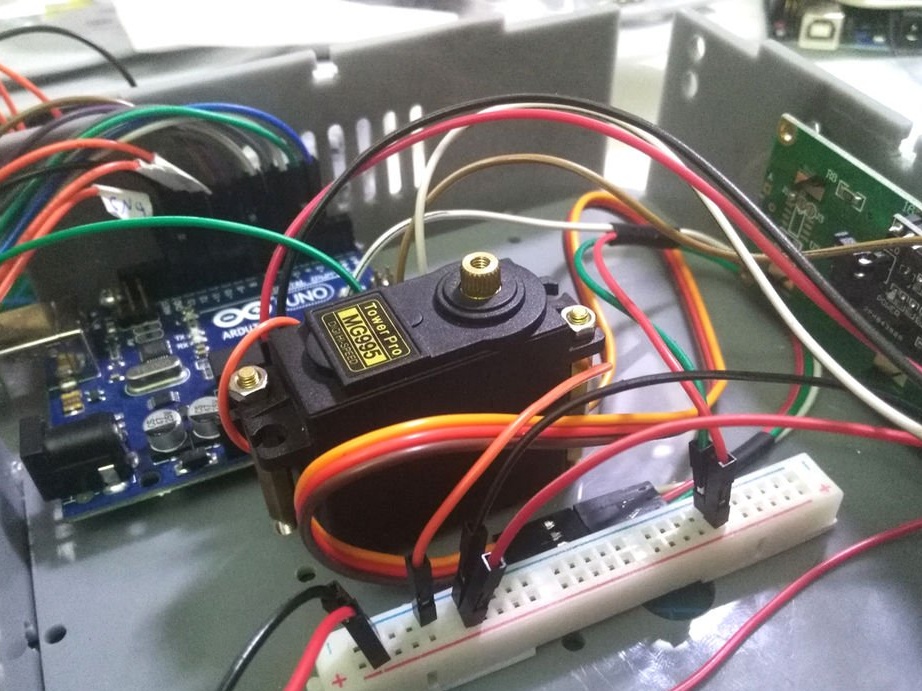

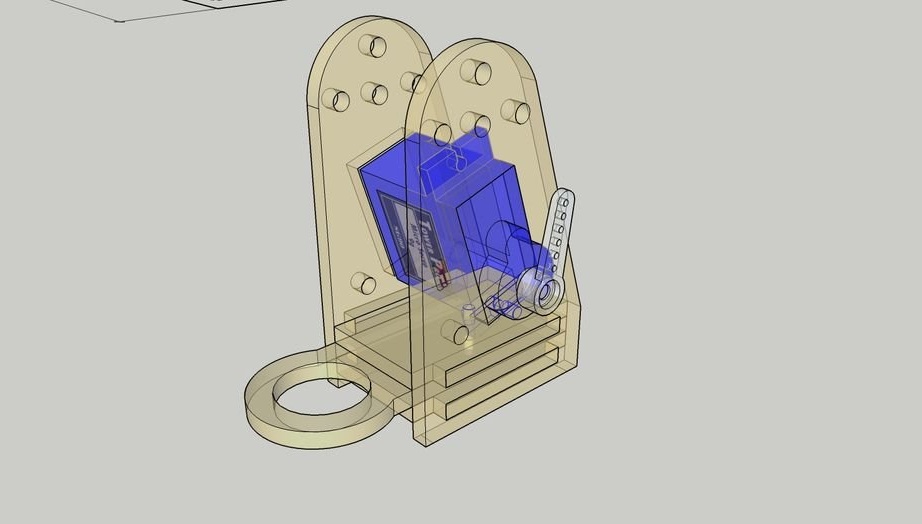
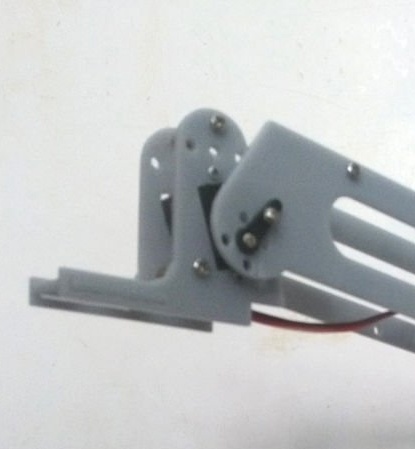
Efter nogle ændringer ændrede skibsføreren design af modellen, reducerede størrelsen på beslagene og lavede et passende hul til servomotorens gearkasse, som vist på billedet.

For at holde loddejernet lavede masteren en speciel holder.For korrekt betjening kræves en servomotor med en 180-graders rotationsparameter.

Koden kan downloades nedenfor.

ProjectCodeFirst.ino
Højdepunkter i fremstillingen af enheden kan ses i videoen.
Naturligvis er information ikke nok, der er ikke et diagram, der er ingen filer til CNC, der er ingen eksempler på enhedens drift, men der er en god idé og måske en interesseret guide, på grundlag af denne idé vil han lave en fuldt funktionel enhed.