
Jeg tror, at hver af jer, der spillede spil, før eller senere ønskede at bruge snyderi. Dette påvirkede også forfatteren (YouTube-kanalen "Open Frime TV") af dette hjemmelavede produkt. Som et resultat fik vi en sådan installation, der afspilles på dit sted.


Fra barndommen elskede forfatteren at spille forskellige spil, og en af dem var “Guitar hero”. Forfatteren spiller stadig det, det hjælper med at slappe af efter en hård dag såvel som at træne reaktionen.
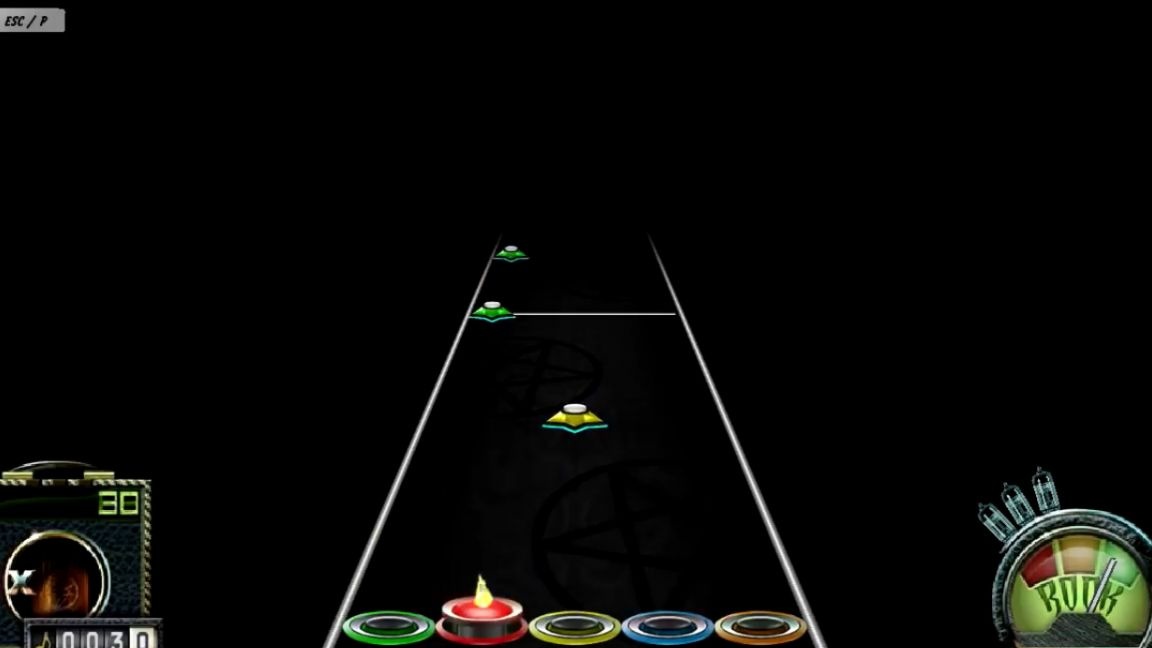
Som du forstår, skal du i dette spil spille sange på guitaren og komme ind i noterne. Når en note nærmer sig dette område, skal du trykke på den tilsvarende tast.
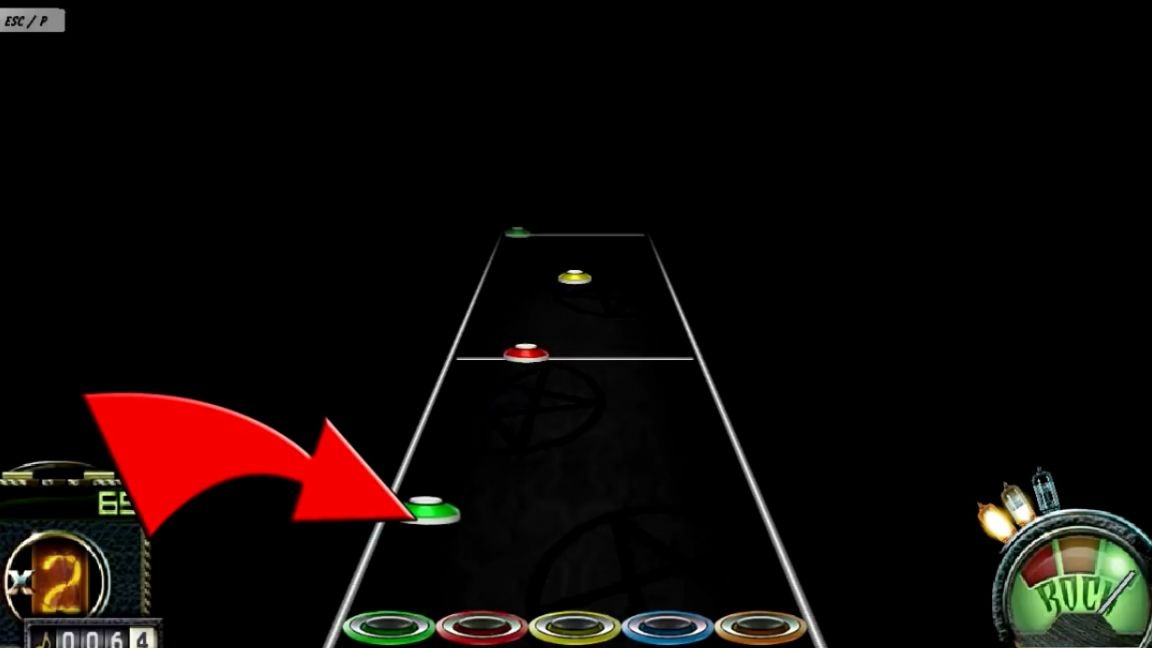
Også i dette spil er der meget komplekse sange, der næsten er umulige at videregive. Det var derefter, at forfatteren kom med ideen om at samle en enhed, der ville følge en note, der var egnet i et bestemt område, og i overensstemmelse hermed trykke på den ønskede tast. Her kan du straks fremsætte 2 kommentarer. Først: selvfølgelig er det nemmest at gøre dette generelt programmatiske og bruge det som snyderi.
Og det andet, selvom det ikke gøres programmatisk, er det ekstremt uønsket at bruge et relæ, det er bedre end en optokoppler eller noget andet.

Nu i orden. Hvis du bruger programkoden, kan du nemt få et forbud i dette spil. Det mekaniske snyderi er næsten umuligt at beregne. Nu om stafetten. Hans ujævnhed skaber en ubeskrivelig atmosfære og den fulde virkning af tilstedeværelsen, så det blev besluttet at dvæle ved dem. Så opgaven er klar. Nu vil du se, hvordan forfatteren af denne hjemmelavede robot formåede at implementere den. Alt er enkelt. Arduino Uno driver hele denne ting.
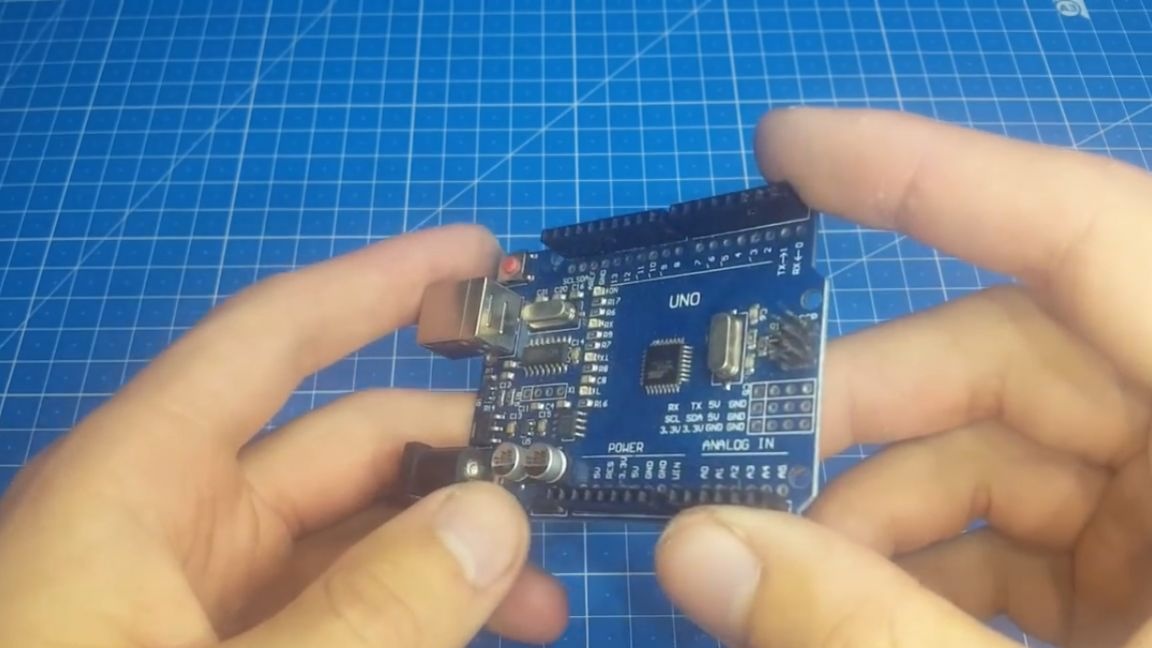
Og der er to grunde til dette. For det første, fordi Arduino Uno-tavlen allerede var i forfatterens besiddelse, og for det andet, ville jeg ikke rigtig gider og lave dette hjemmearbejde på operationelle forstærkere, da Arduino meget lettere bare ved at ændre værdierne i koden.
For at skabe en hjemmelavet robotbot har vi brug for et gammelt computertastatur, som vi vil forbinde og trykke på knapper.

Vi har også brug for hjul, fototransistorer og forskellige bagateller, dette ser du senere.
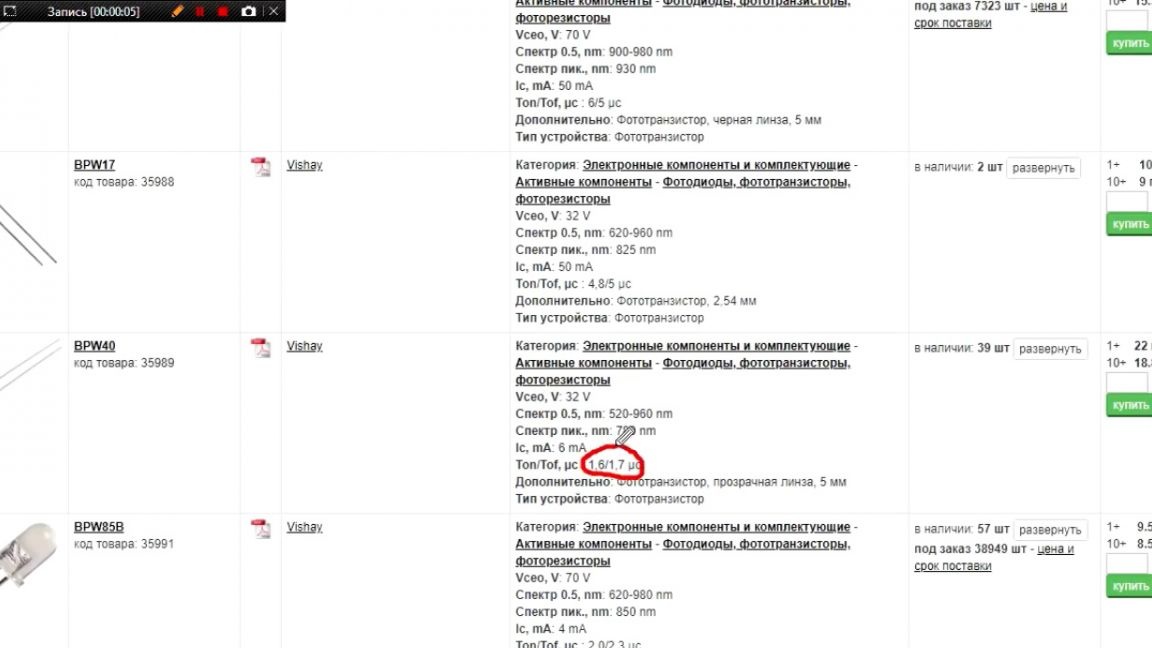
Hvorfor besluttede forfatteren at bruge fototransistorer? Svaret er dette, først lavede han en robot ved hjælp af fotoresistorer, men så viste det sig, at de var for langsomme og ikke havde tid til at træne.

Hos fototransistor er skiftehastigheden kun 0,01 sekunder, og det giver os fremragende ydelse.
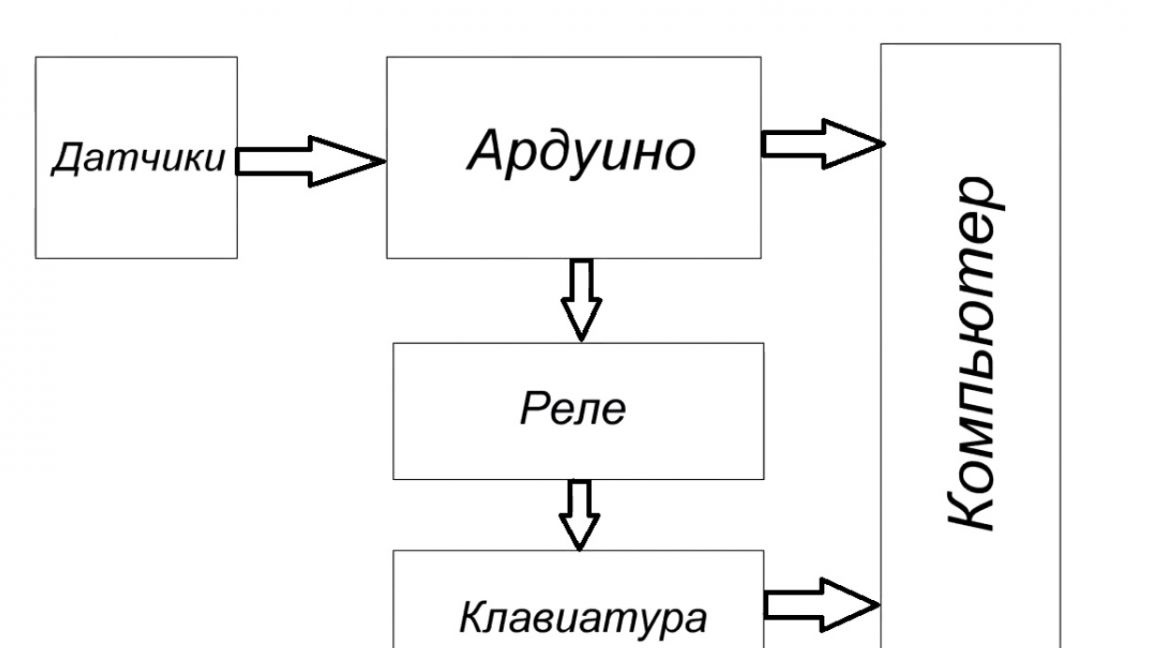
Gå nu direkte til enhedsdiagrammet. Lad os se på flowcharten først.
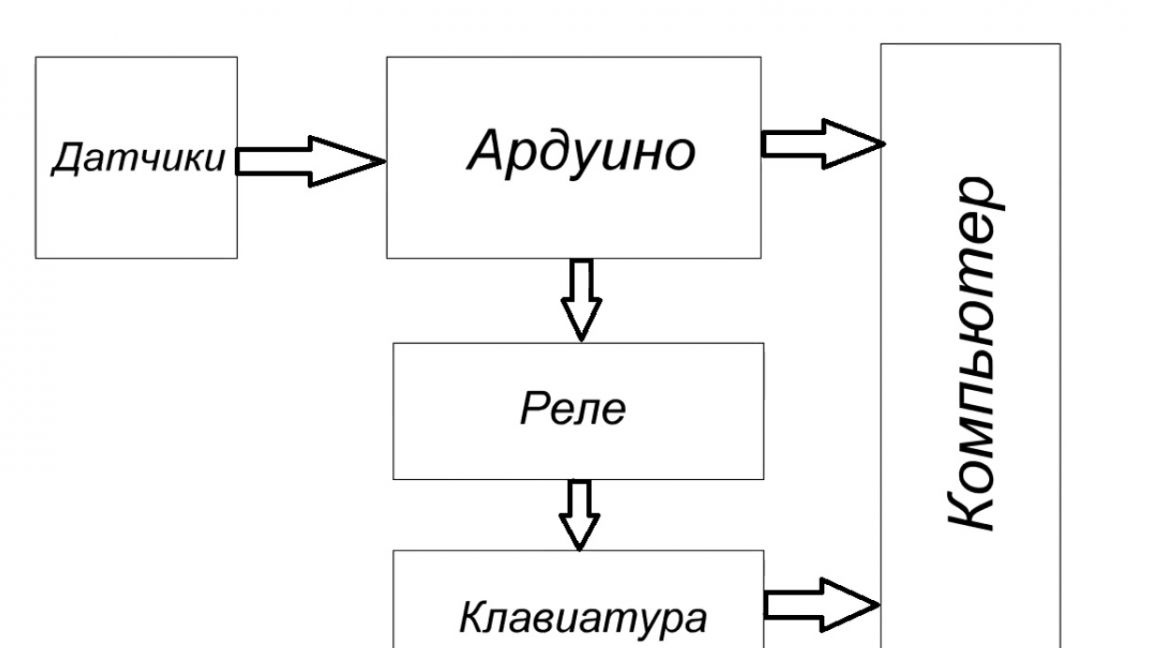
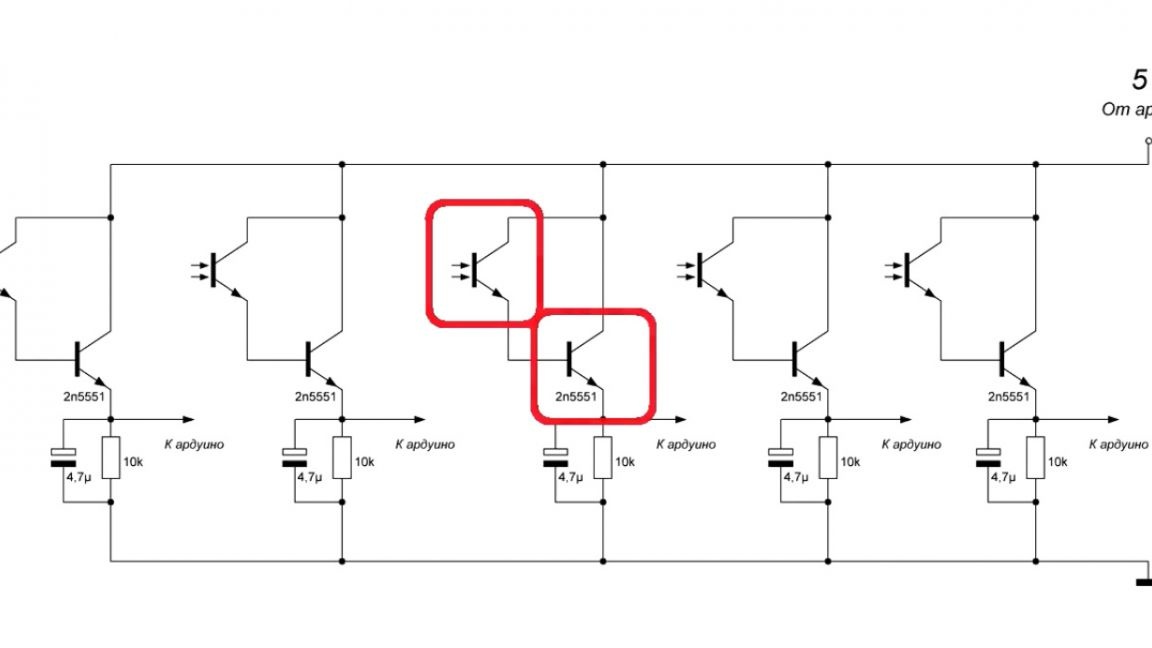
Som du kan se, alt er temmelig enkelt her. Og nu betragter vi hver enkelt blok separat. Sensorkredsløbet ser sådan ud.
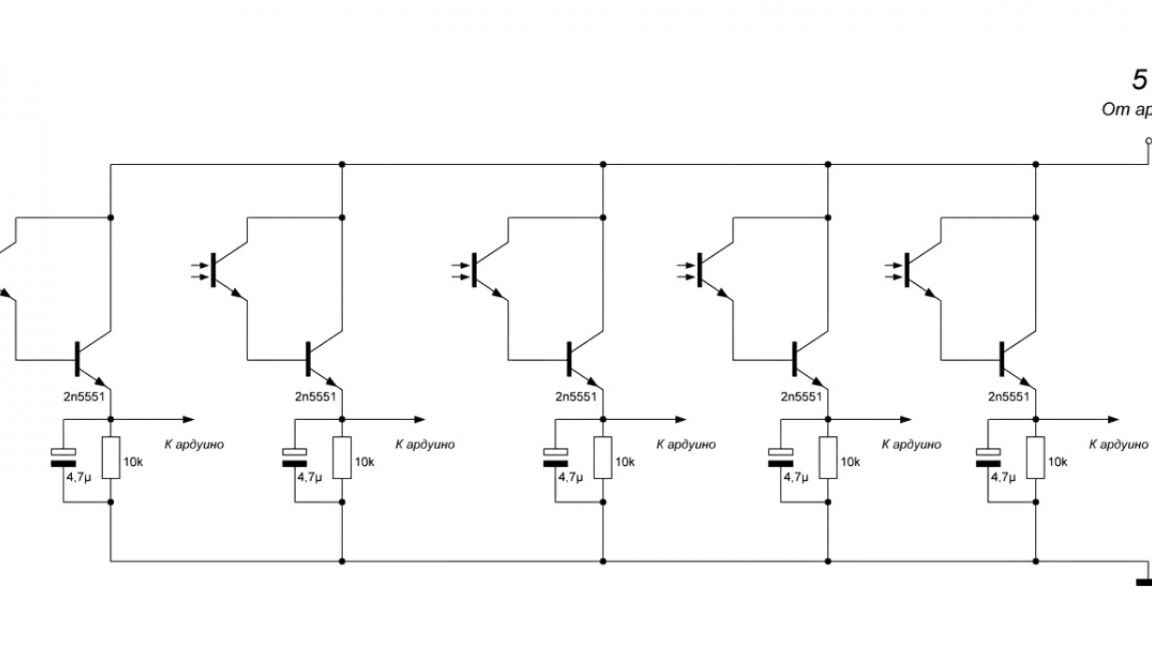
Hver fotoresistor er kombineret med en almindelig transistor for at øge forstærkningen, og der er også pull-up-modstande og udjævningskondensatorer for at forhindre falske alarmer.
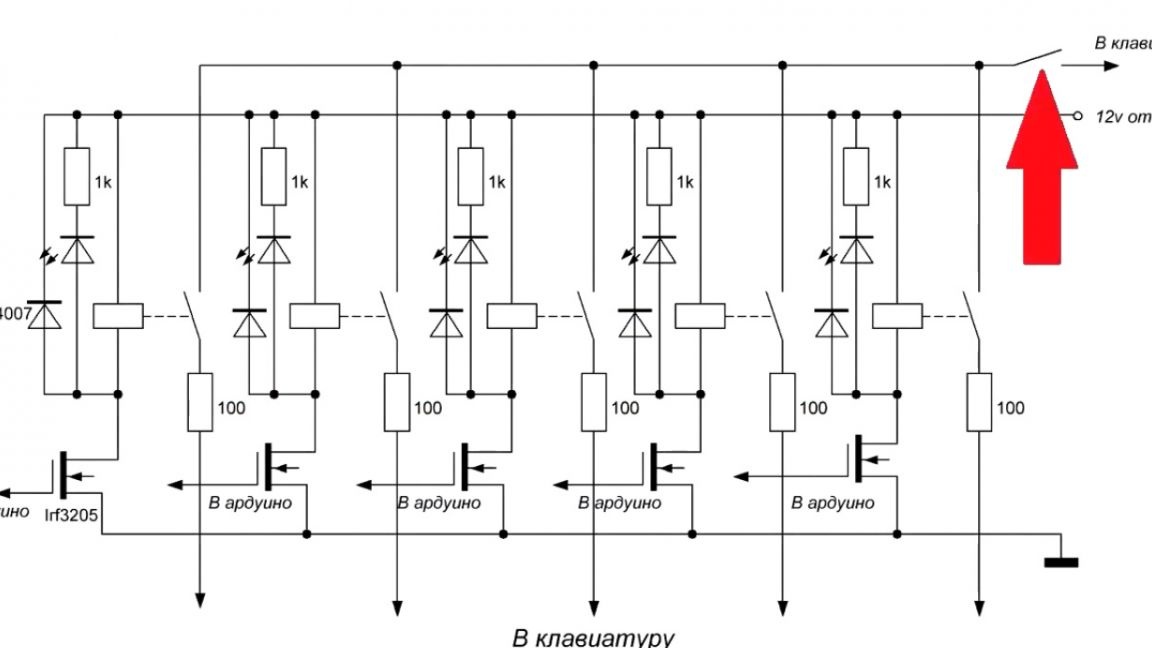
Den anden ordning er en trust-ordning.
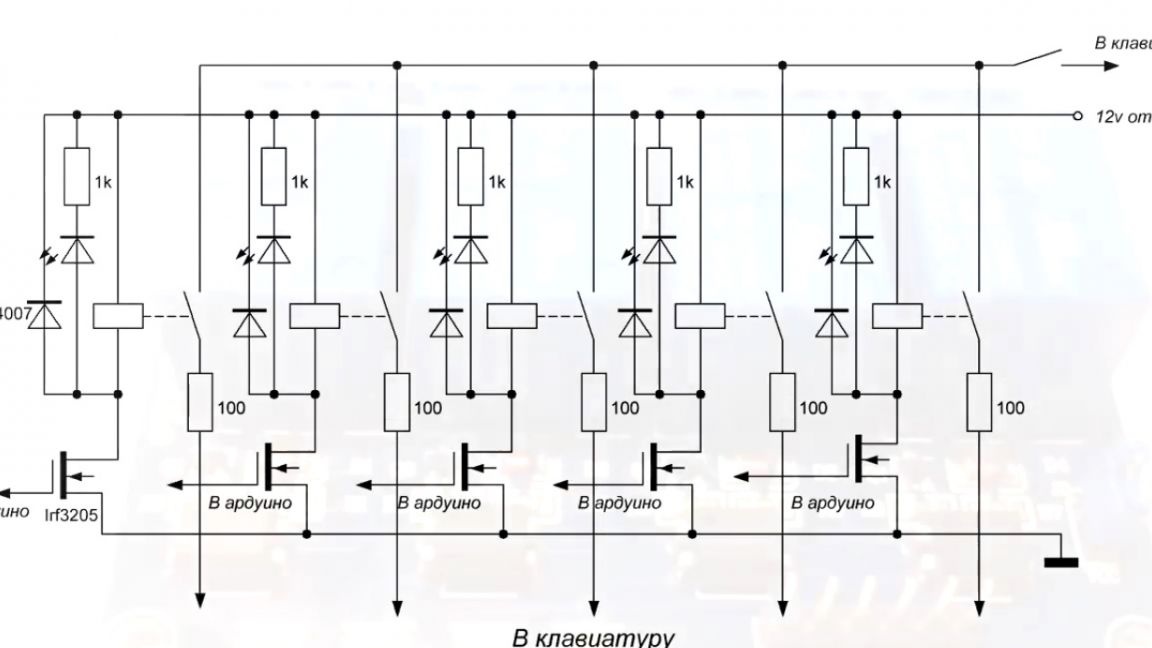
I stedet var det muligt at tage et færdigt modul, men hvilken slags radioamatør ville vi være, hvis vi ikke gjorde det selv gør det selv.

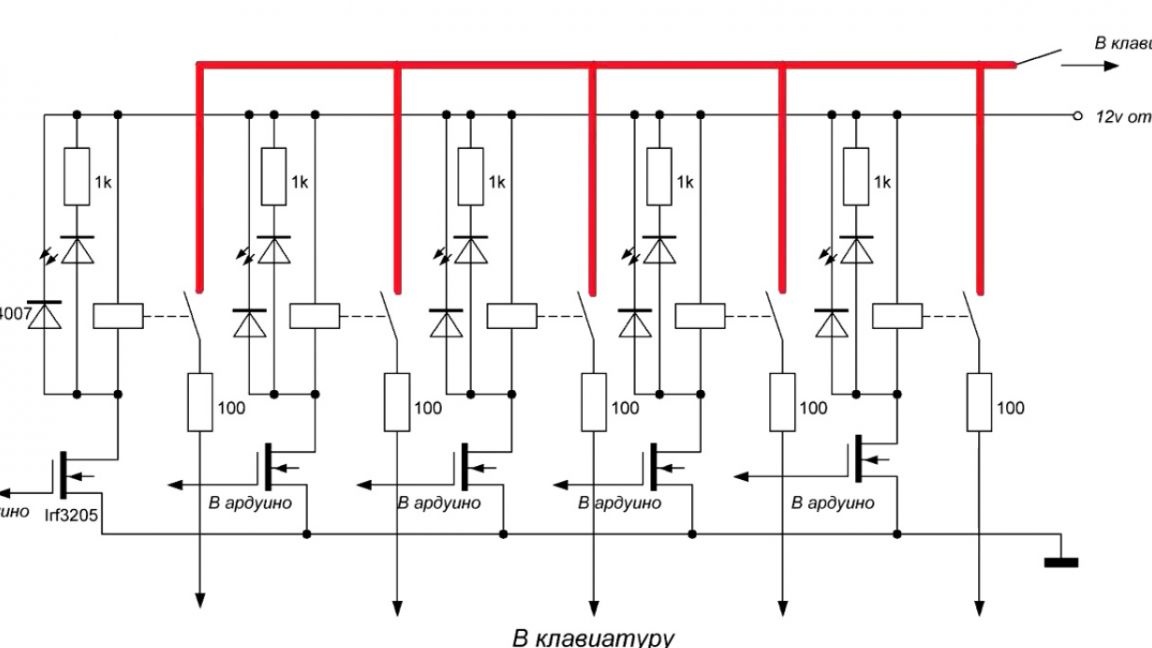
I dette diagram kan du se mosfets, der styrer skinnen, beskyttelsesdioder såvel som lysdioder (det blev besluttet at placere dem helt til slut for at forenkle opsætningen af enheden).
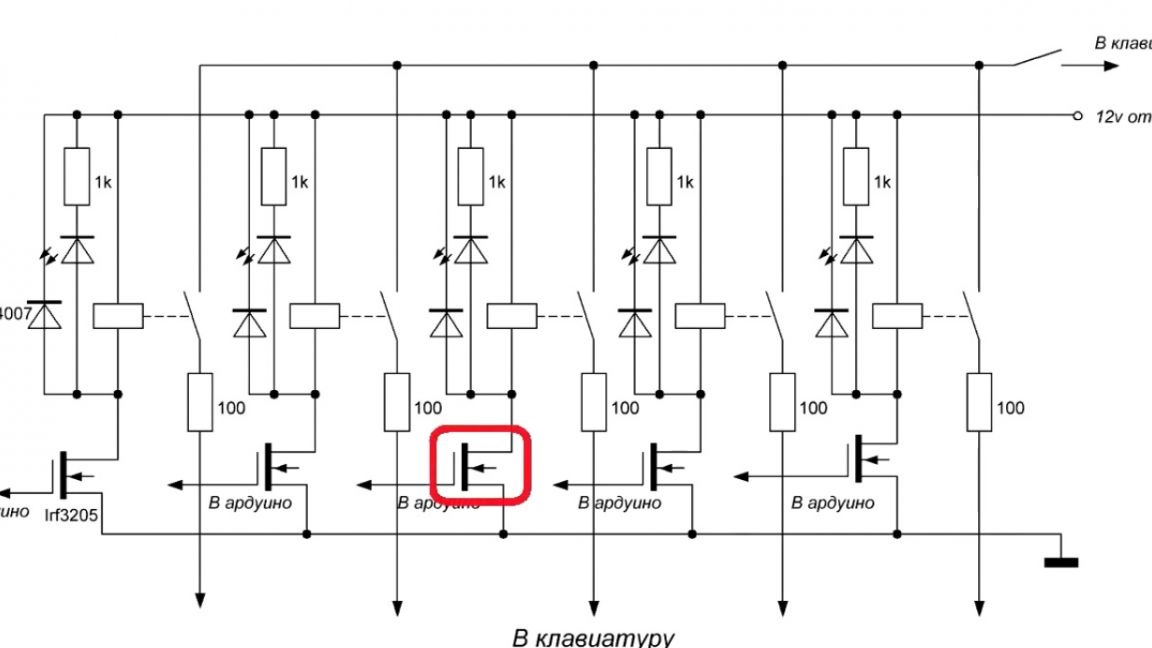
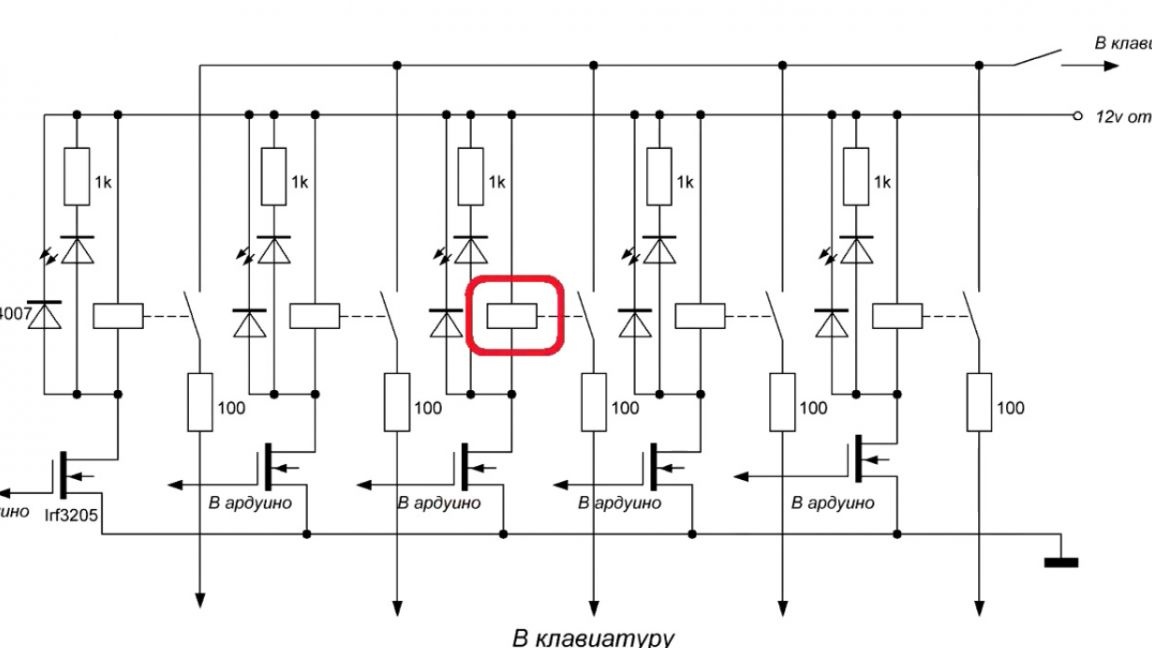
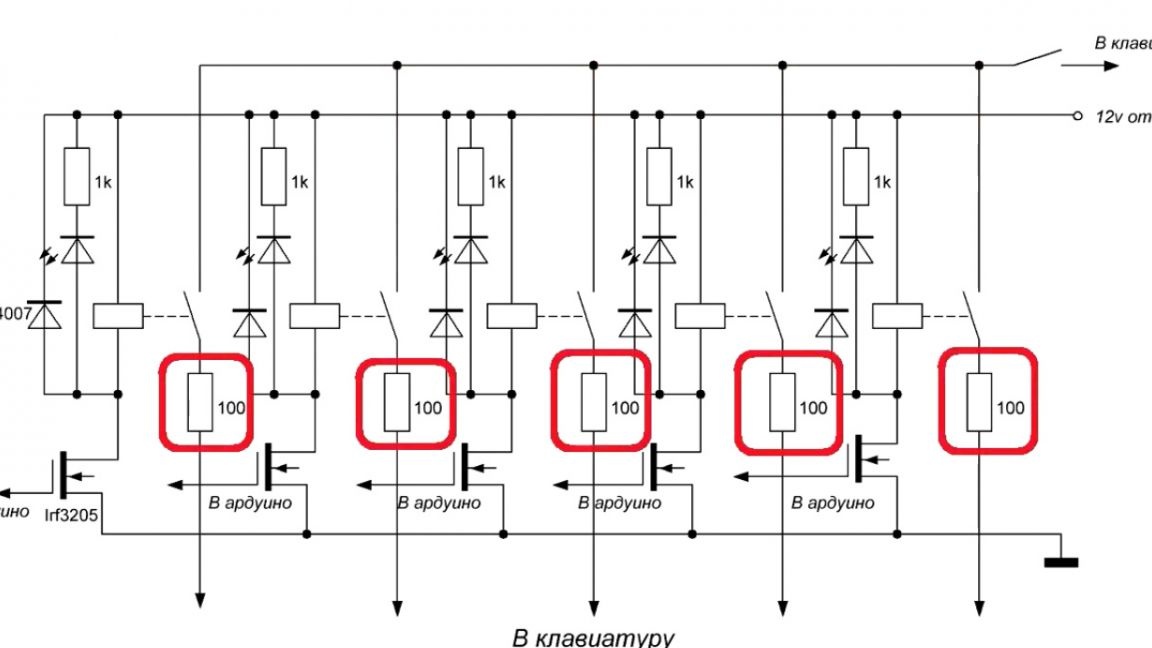
Også her ser vi et uforståeligt spor og modstande, lad os finde ud af, hvad det er.
Så som nævnt tidligere har vi brug for et gammelt tastatur til fremstilling af dette hjemmelavede produkt, det kan bruges med en anden forbindelsesgrænseflade (usb eller PS / 2 er ikke vigtig).

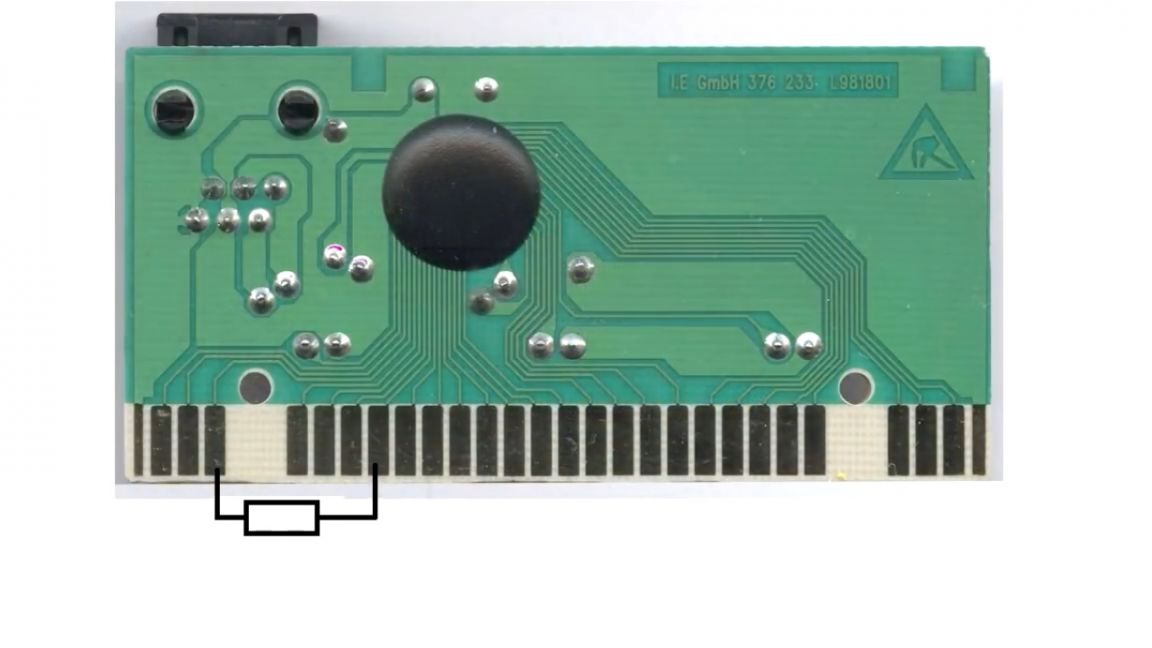
Fra det skal du hente modulet.
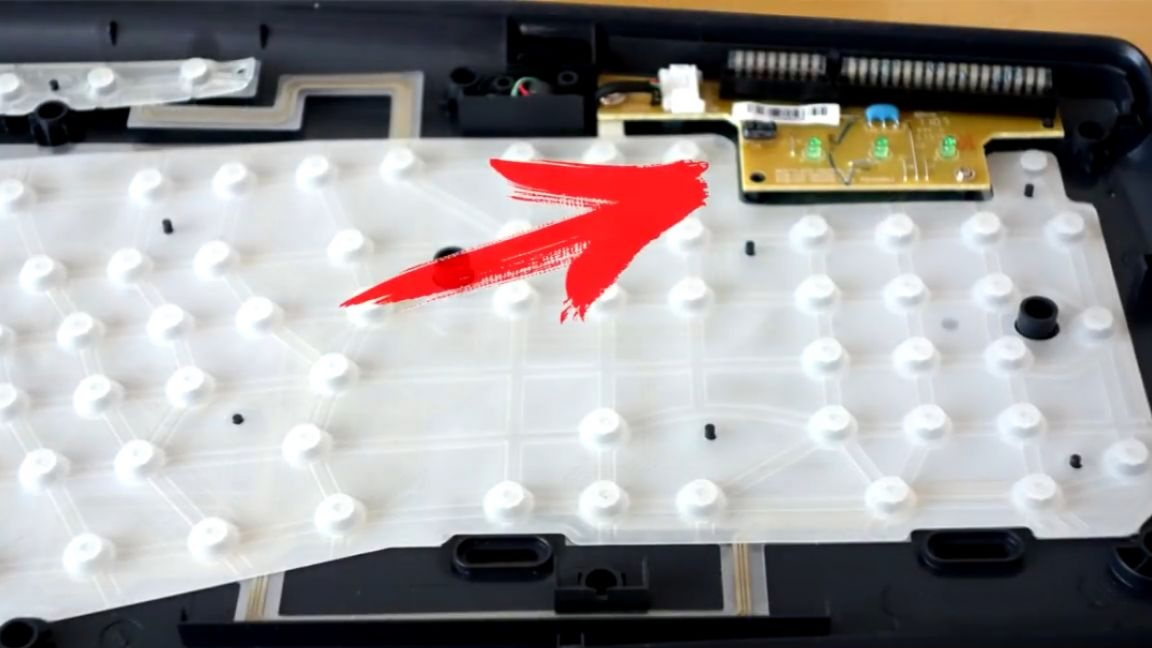
Nu skal du lodde hjulene i stedet for knapper, for dette skal du forstå, hvordan tastaturet fungerer.

Selve platformen med tasterne indeholder spor, men disse spor er ikke let, men med modstand.
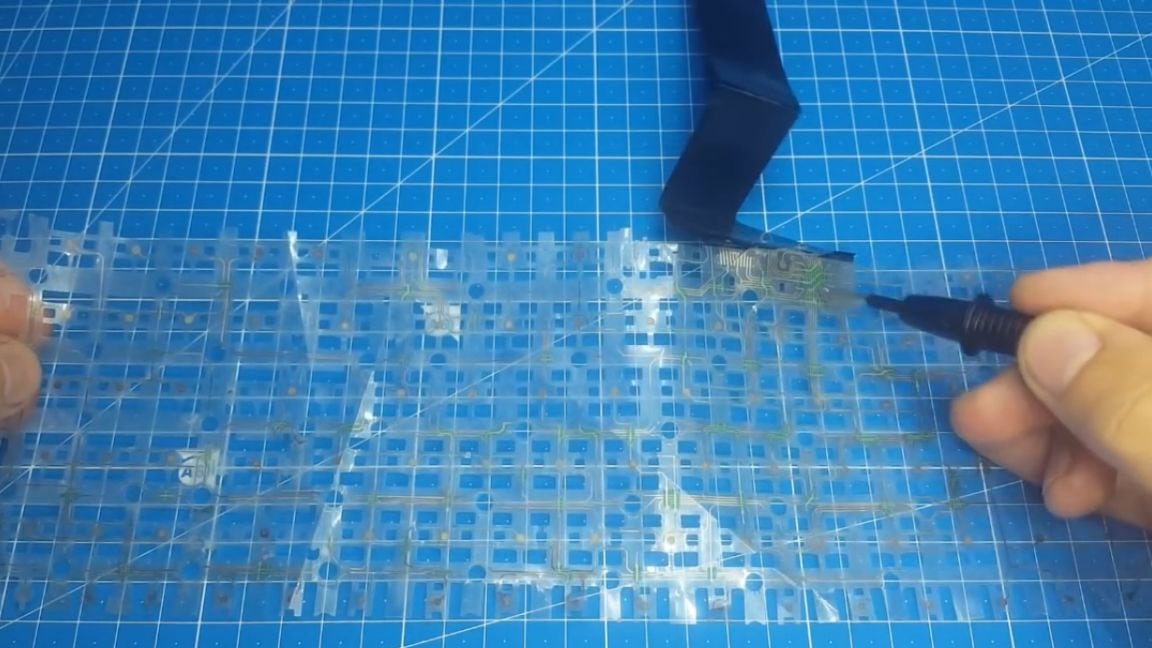
Og lad os sige, hvis vi lukker på dette tidspunkt, så er modstanden 50 ohm:
Og på dette tidspunkt er det allerede 100 ohm.
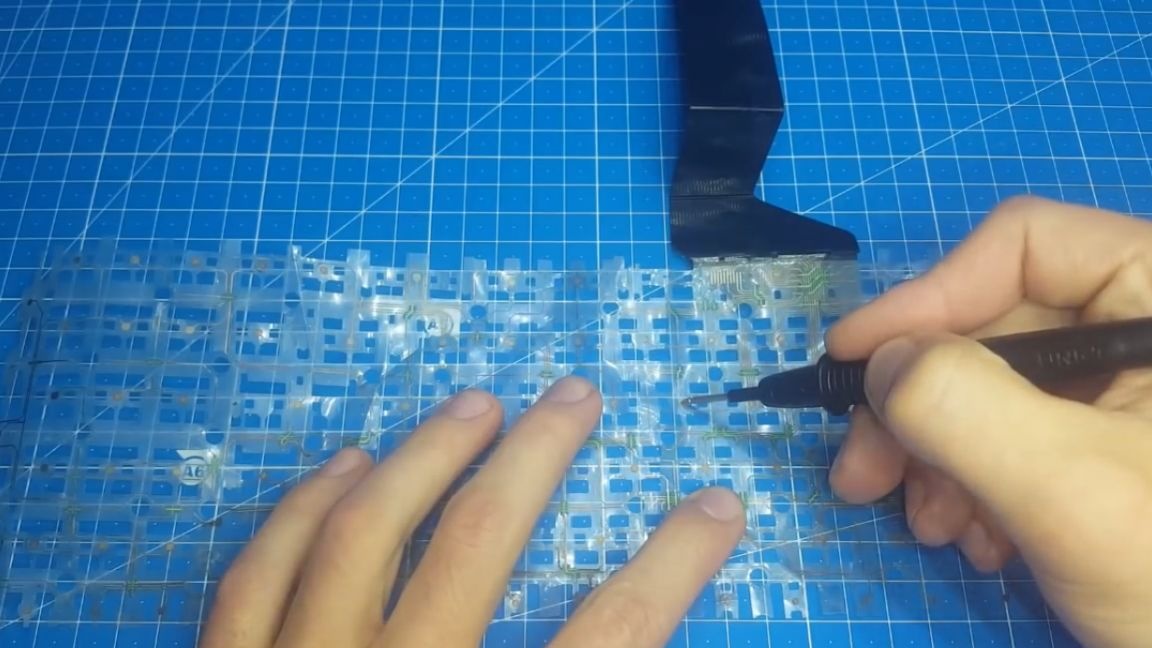
Modulet ser dette og giver information til computeren. Vi er nødt til at erstatte disse spor med modstande. For at gøre dette måles sporets modstand.

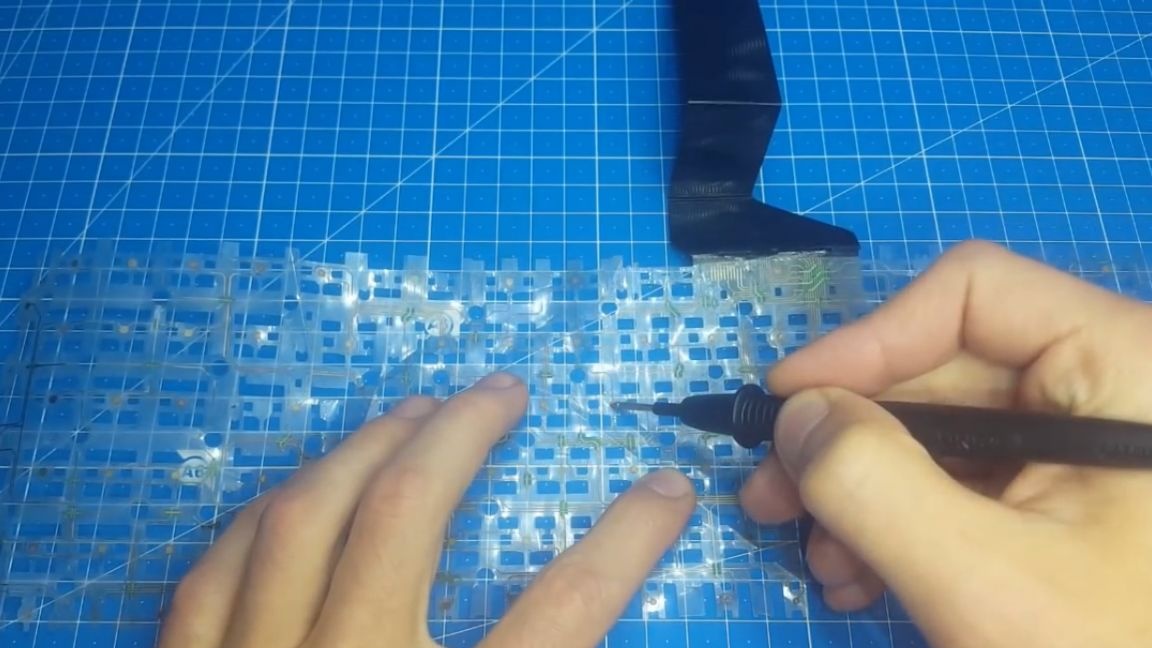
Derefter forbinder vi tastaturet til computeren, tager en passende modstand og begynder at forbinde det til forskellige punkter, afhængigt af hvilken tast vi trykker på.
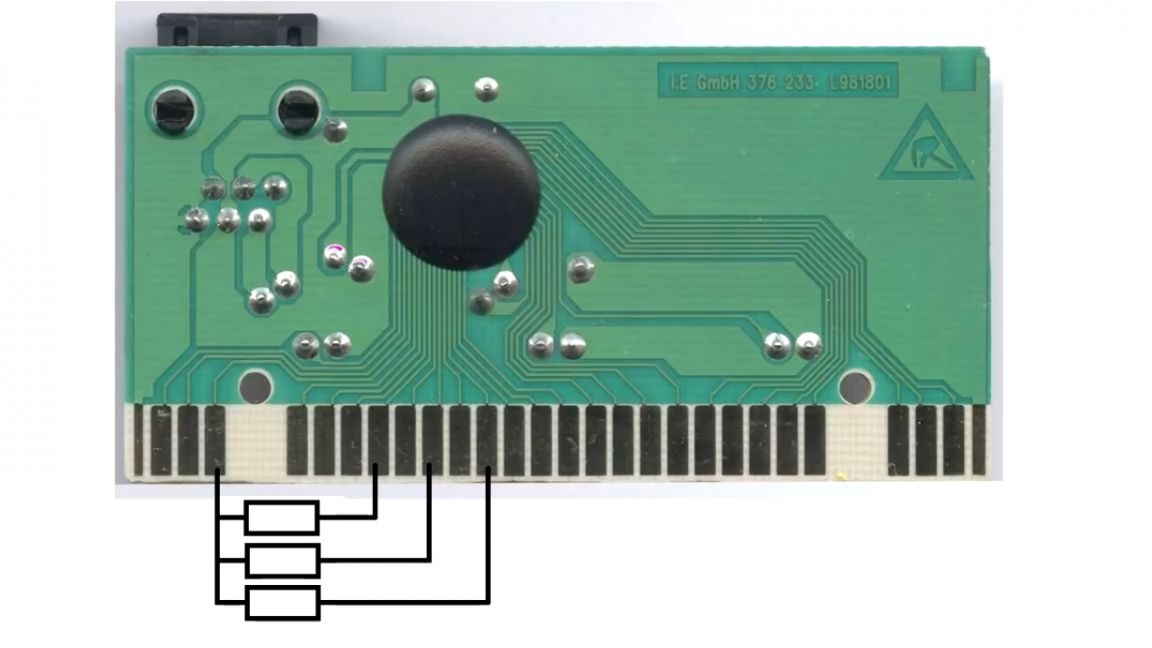
Her tilrådes det at finde et spor, som du kan tilslutte 5 taster på én gang.
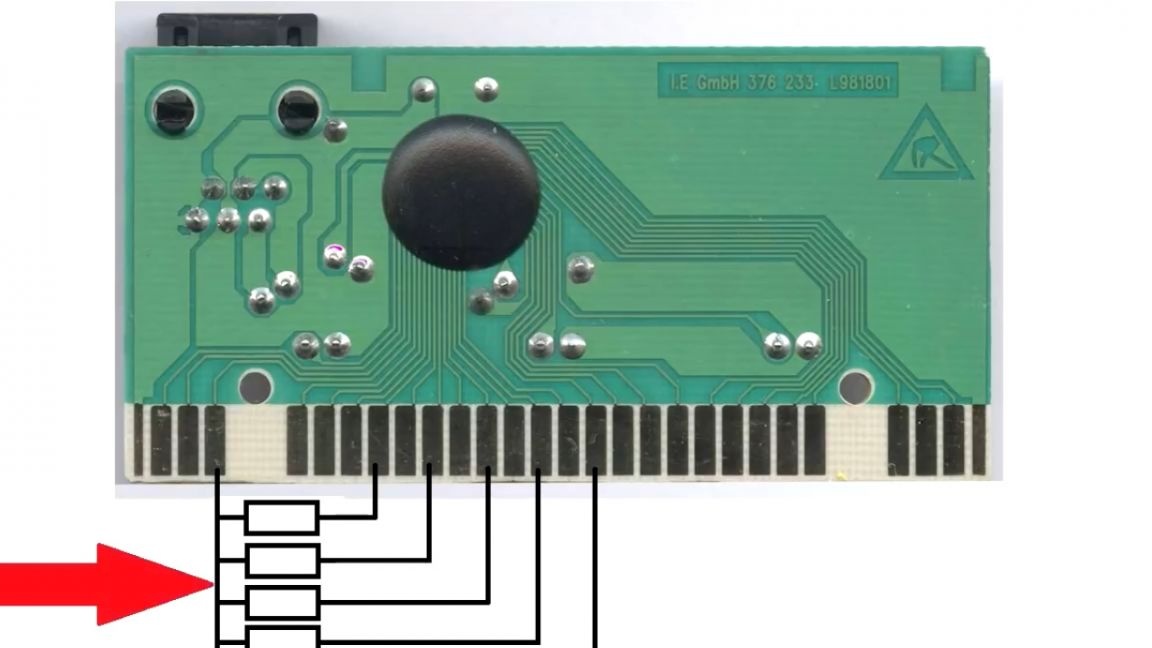
Dette gøres på en sådan måde, at du kan slukke for tastaturet, når spillet er forbi, ellers begynder hjulene, der lukker lyset, at sprænge alle tasterne og skabe vildt kaos.
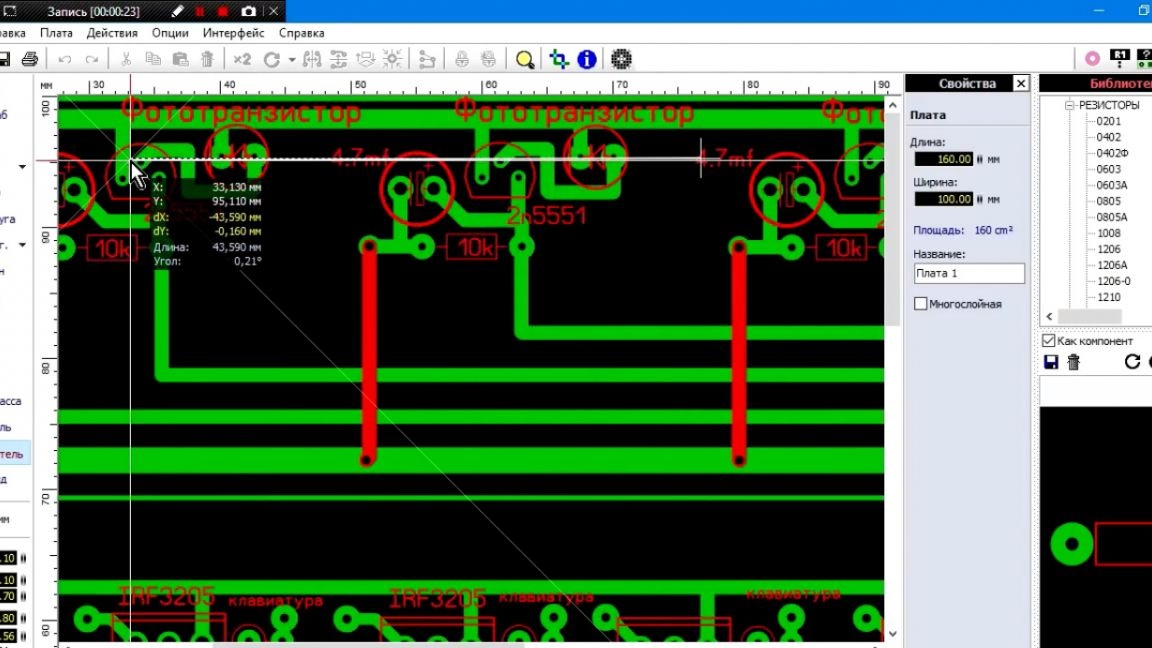
Og nu, da vi regnede ud kredsløbene og forbindelsen, var det tid til at lave de trykte kredsløb. For nemheds skyld kunne det naturligvis gøres på en brødbræt, men det forekom forfatteren lettere at tegne et signet i stedet for at blive plaget med brødbræt.
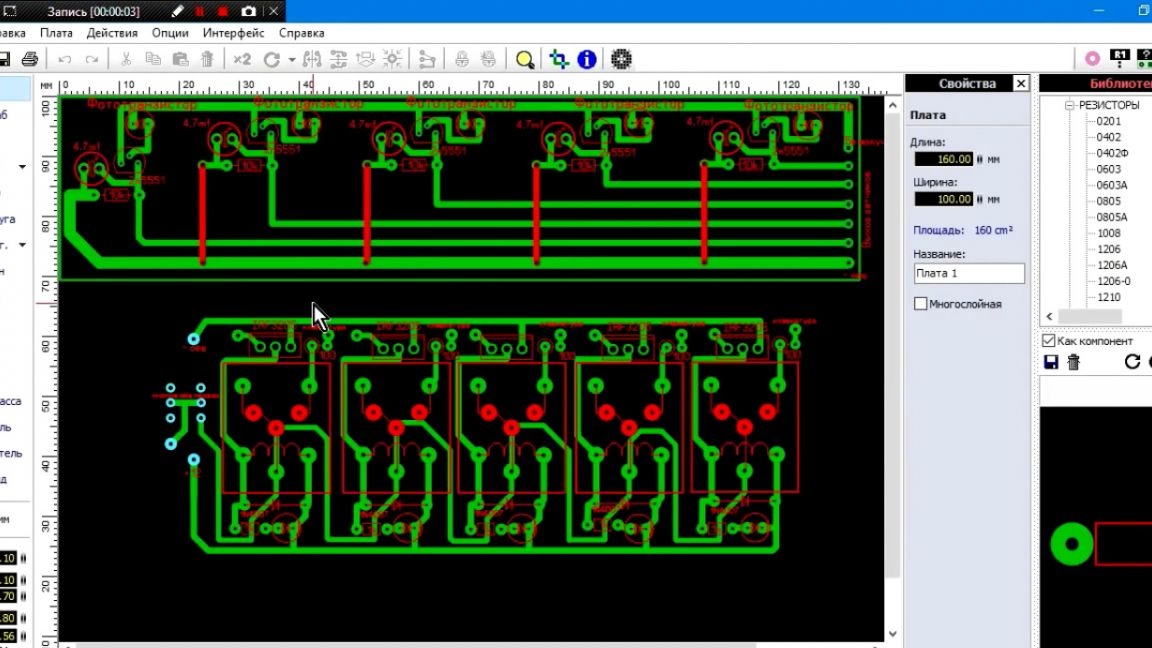
Så brættet er trukket. Forfatteren valgte placeringen af fotoresistorer for sin skærm, for en anden skærm, du har brug for enten at øge eller formindske afstanden.
De resulterende plader forsegles, alt dette gøres elementært. Vi samler individuelle blokke.

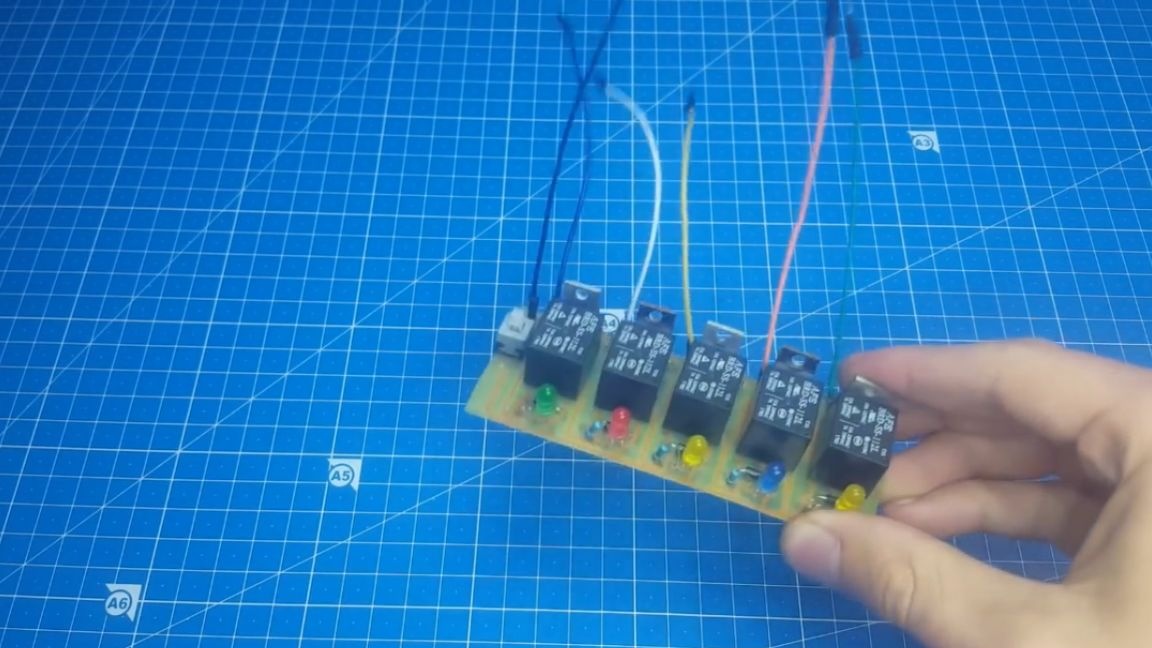
Som du kan se, forfatteren lavede et sådant stand for fotoresistorer, så de ville være på det rigtige niveau.
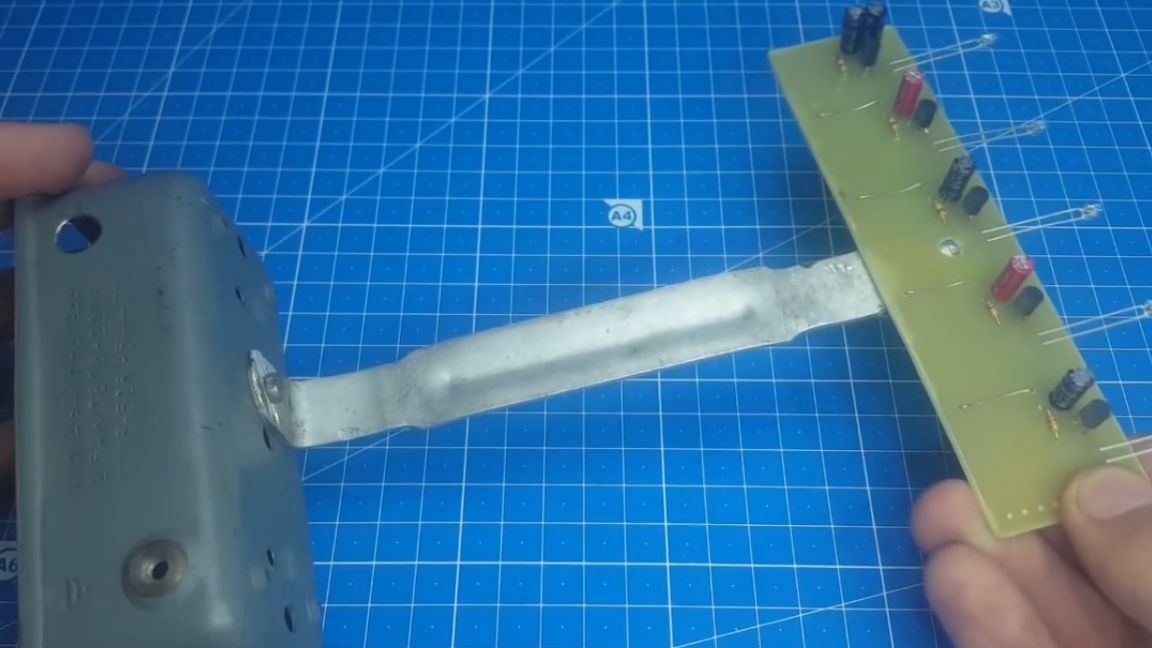
Det gjenstår at forbinde blokke til en enhed. Vi samler alt som på figuren, og nu kan vi gå videre til arduino firmwarekoden.

For at gøre dette har vi brug for denne skitse.
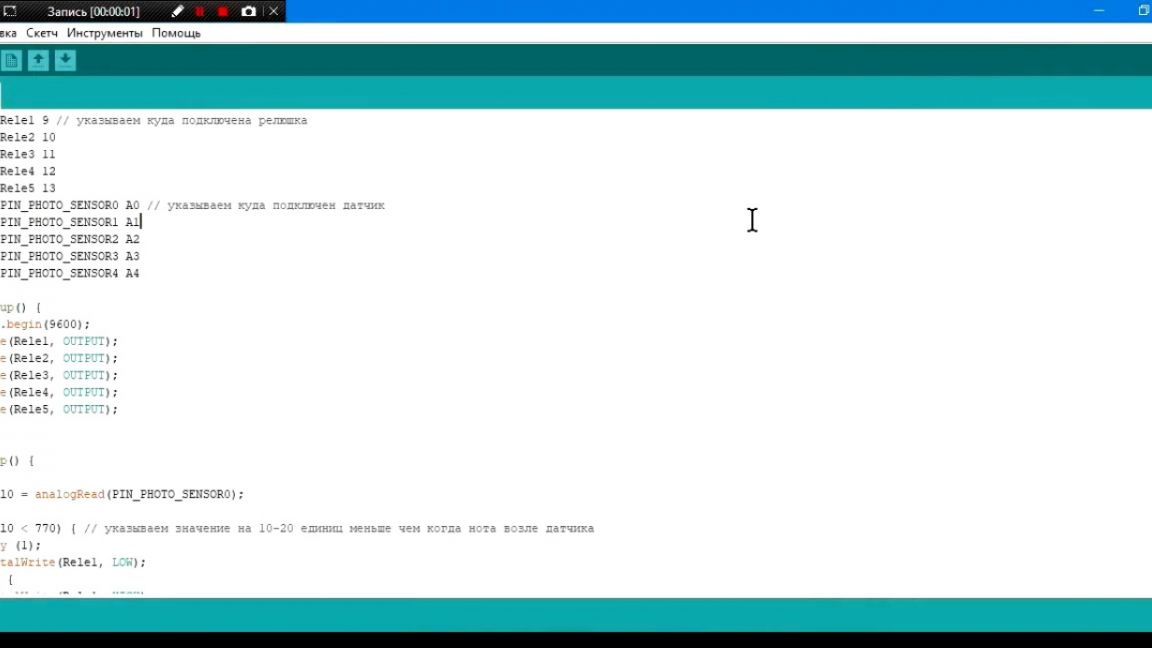
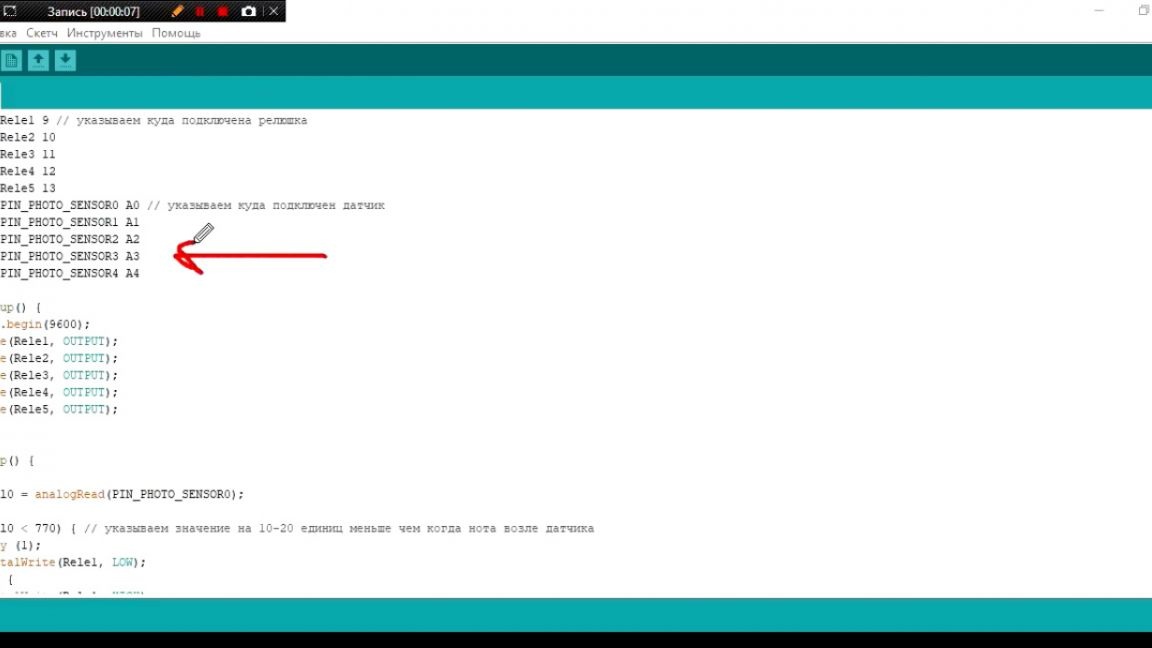
Her viser vi, hvor lyssensorerne er forbundet:
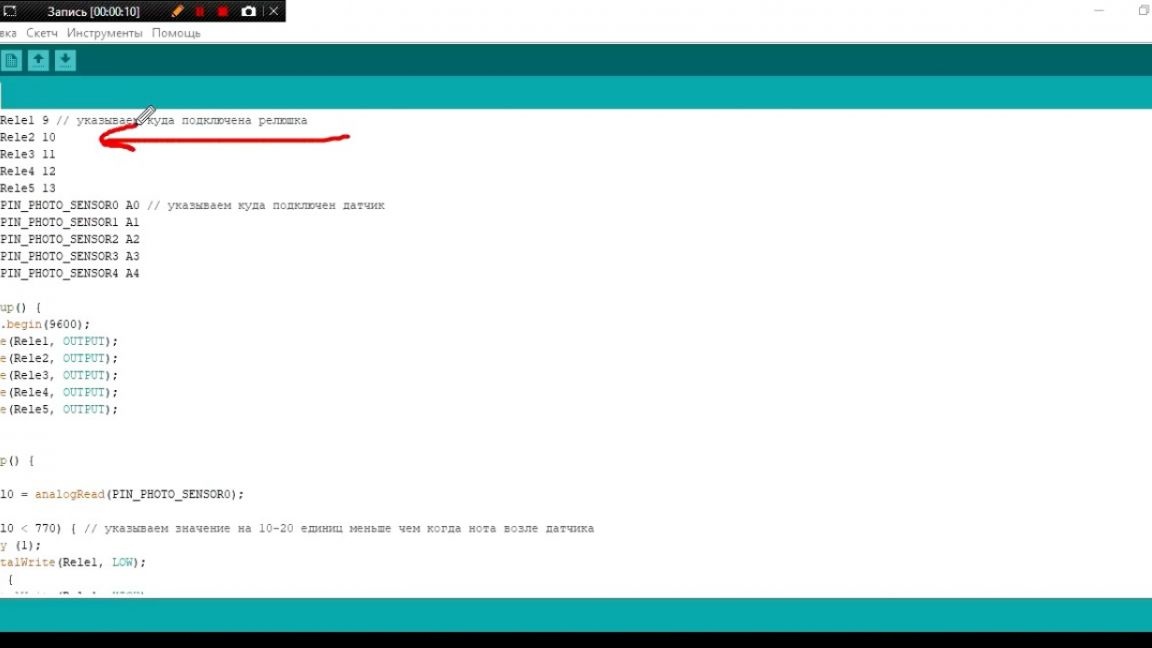
Og her, hvor relæerne er forbundet:
Nu gjenstår det at foretage justeringen. For at gøre dette skal du se på portmonitoren for hver sensor med en mørk skærm, og når en note passerer gennem sensoren.
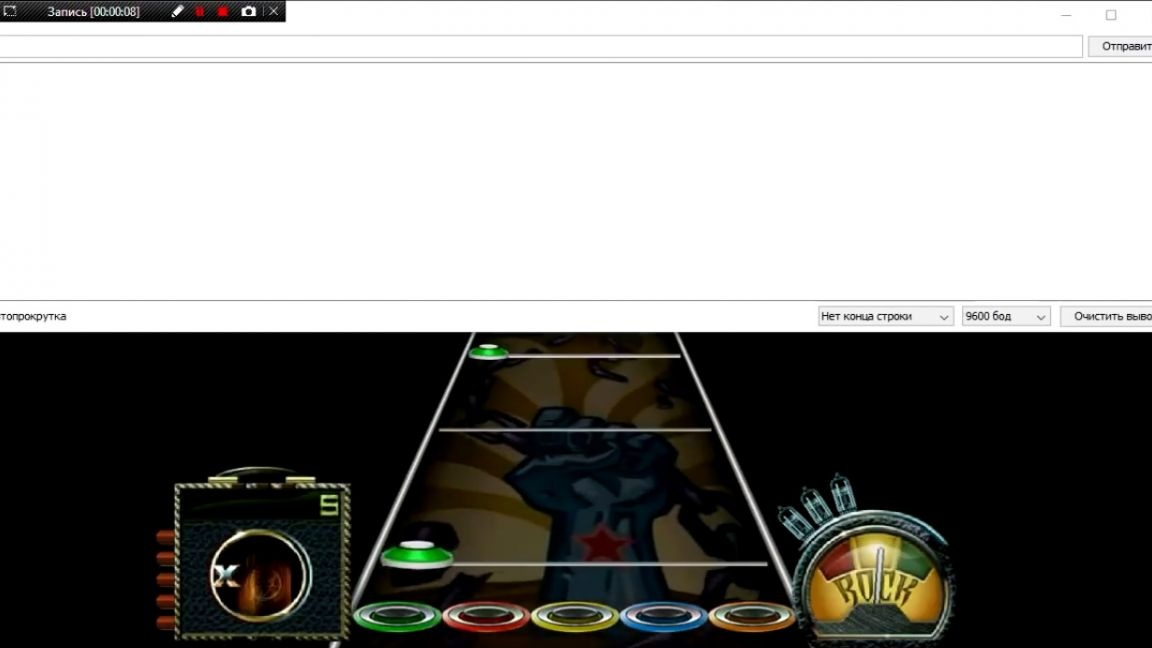
Det gjenstår kun at køre her den værdi, der var, når noten passerer sensoren.
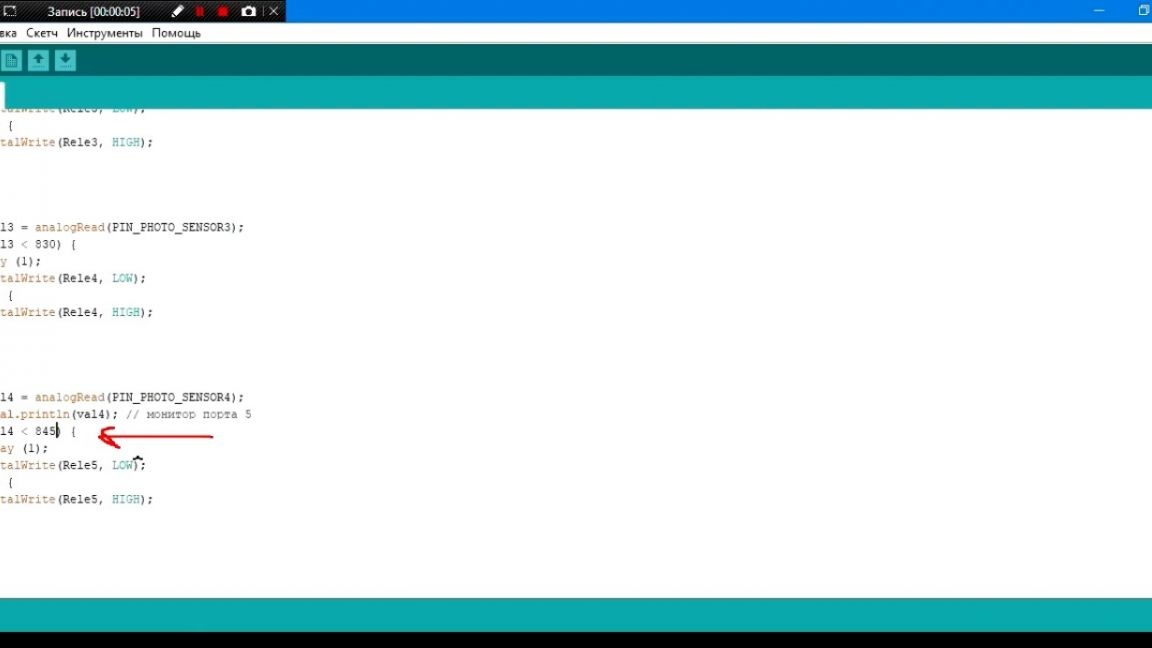
Men det er alt. Udfyld skitsen i arduino, og du kan teste den.


Som du kan se, gør enheden et fremragende stykke arbejde. Det er sandsynligvis alt. Tak for din opmærksomhed. Vi ses snart!
videoer: