


God eftermiddag, i dag vil jeg dele instruktioner om at lave en legetøjstank styret af en Android-telefons accelerometer. Tankens bund vil være lavet af farvet krydsfinér 3 mm tyk. Larver og dobbelt gearmotor fra det berømte Tamiya-selskab. Producerer kvalitet og billige dele.
Til tanken har vi brug for:
- Tamiya 70168 dobbelt gear
- Tamiya 70100 sæt ruller og spor
- Tamiya 70157
- Krydsfiner 10 mm (et lille stykke)
- Arduino Pro Mini 5V AtMega 328
- DRV 8833
- Bluetooth-modul HC-06 eller tilsvarende
- USB-UART til Arduino firmware
- Rektangulære røde og grønne lysdioder
- Hvide lysdioder 5 mm 2stk.
- Modstande 3x 150 ohm
- Li-ion 18650 batterier
- Dupont-far-mor-stik
- Ledninger i forskellige farver
- lodning
- Rosin
- loddejern
- Bolte 3x40, 3x20, møtrikker og skiver til dem
- 2x10 træskruer
- Træbor 3 mm og 6 mm
- Elektrisk fretsav
- Akrylmaling
Trin 1 Montering af gearmotor.
Jeg kan godt lide at bruge Tamiya gearmotorer. De kan accepteres, samles let. Tamiya 70168 har fire byggeindstillinger. Afhængig af det ønskede gearforhold og position for udgangsakslerne.
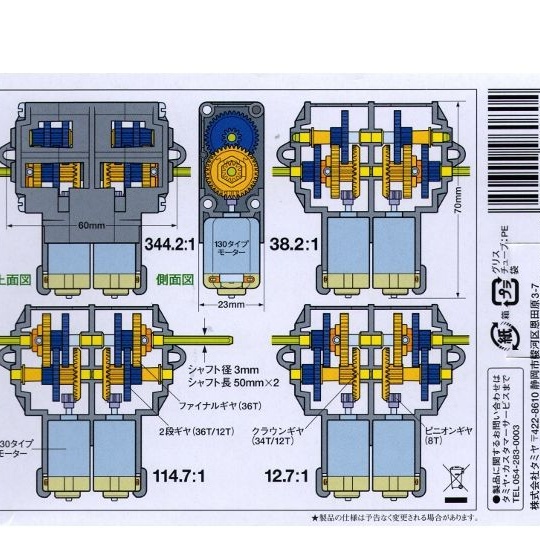
Detaljerede instruktioner er indeholdt i gearkassen. Vi har brug for, at outputakslerne skal være tættere på motorerne, og gearforholdet 114,7: 1. Vi vælger den mulighed, vi har brug for, og samler alt i henhold til instruktionerne, bortset fra installation af motorer. Det er mere praktisk at placere motorer senere, derudover skal ledninger og kondensatorer loddes til dem inden installation.
Trin 2 Produktion af kropsdele.
Kassen vil være lavet af 3 mm tyk krydsfiner. Download følgende billede, og udskriv det på A4-ark i en skala fra 102%.
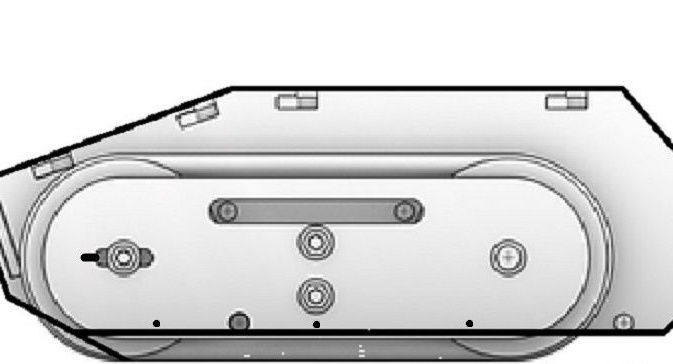
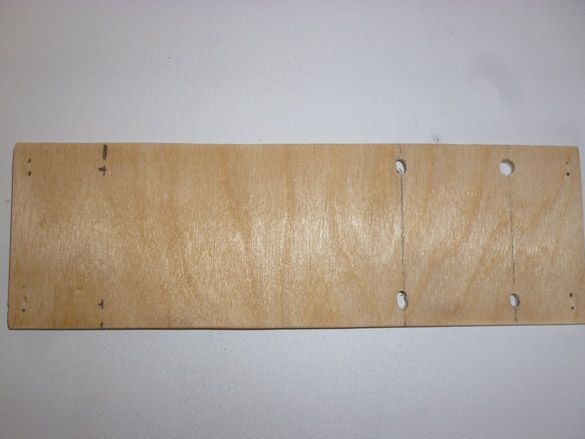
Nu tager vi to stykker krydsfiner i tilstrækkelig størrelse, sætter det ene på det andet, lægger vores billede på toppen. Der skal laves 3 mm huller i de områder, der er markeret med en fed prik. Så begge dele er ens, først borer vi et ark og to krydsfiner på et af punkterne, indsætter en bolt der, og drejer billedet og to stykker krydsfiner sammen. Derefter det andet hul, og indsæt også en bolt der. Derefter borer vi alle resten. Vær opmærksom på det øverste hul, det er nødvendigt at give det en oval form. Dette er nødvendigt for at kontrollere sporene. Nu tager vi et puslespil og klipper øjeblikkeligt to sider af sagen ud efter billedets fed skrift. To sådanne detaljer skulle vise sig:
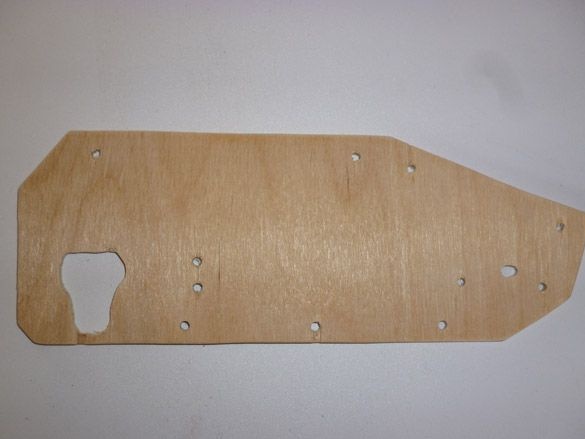
Derefter skal du gøre alt det ovenstående, kun denne gang skærer vi ud to dele, der dækker sporene. Det er nødvendigt at skære på den lille oval, der er tegnet på billedet. Som et resultat får vi to flere detaljer:
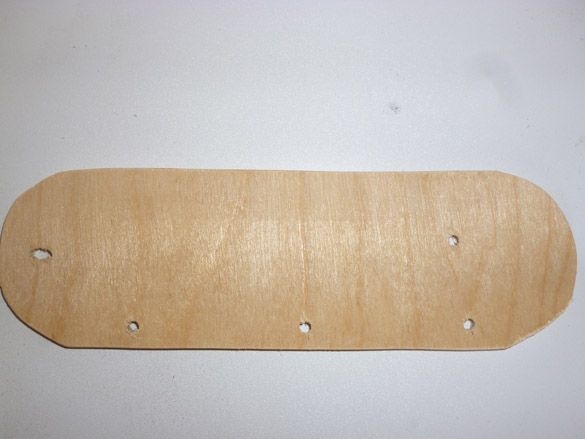
Nu tager vi et ark krydsfiner i ét lag og skærer et rektangel med dimensioner på 168 x 54 mm. Dette vil være bunden af vores tank og den del, som gearmotoren er knyttet til:
For at starte monteringen har vi brug for alle de detaljer, der er beskrevet ovenfor:

Du kan efterlade alle detaljerne som de er, men jeg foretrækker at male dem. Akrylmaling er velegnet til maling. Det tørrer hurtigt og lugter ikke, hvilket betyder, at du kan male i ethvert rum uden frygt for forgiftning. Så vi maler de udskårne detaljer:

Nu har vi brug for 10 mm krydsfiner eller en passende træpind. Det er nødvendigt at skære et rektangel på 54 x 15 mm og en tykkelse på 10 mm. Denne del er nødvendig for at forbinde huset sammen. Efter at have lavet et rektangel, borer vi to huller i en afstand af 15 mm fra kanten, først med en 3 mm bor og derefter 6 mm, men ikke gennem og gennem, men kun halvdelen af dybden. Indsæt møtrikkerne i de opnåede huller, og fastgør dem med lim. Vi har brug for fire sådanne detaljer:

Igen tager vi krydsfinér 3 mm tyk. Klip et rektangel 107 x 60 mm. Når man trækker sig tilbage 15 mm fra borehullets kanter 3 mm, vil dette være øverste låg:

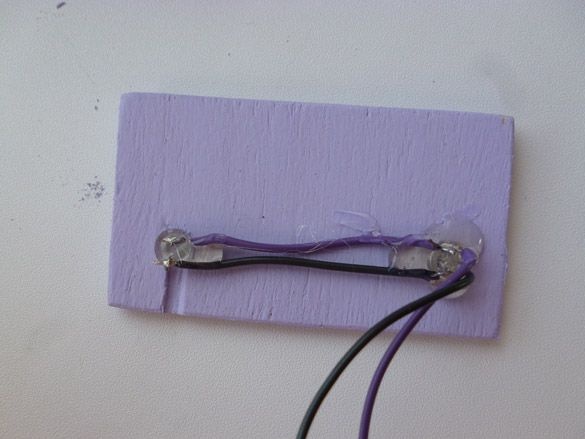
Vi skærer det næste rektangel, der måler 33 x 60 mm. Bagside 15 mm fra kanterne, vi borer to huller med en diameter på 5 mm. Skæring og stripping af en del maler vi den. Derefter indsætter vi hvide 5-millimeter LED'er i de fremstillede huller. Vi lodder dem parallelt og fikseres ved hjælp af smeltlim:
Trin 3 Montering af huset.
Når vi har klargjort gearmotoren og dele, fortsætter vi med at samle alt sammen. For at komme i gang skal du tage den nederste del af sagen og sæt gearmotoren fast på den:
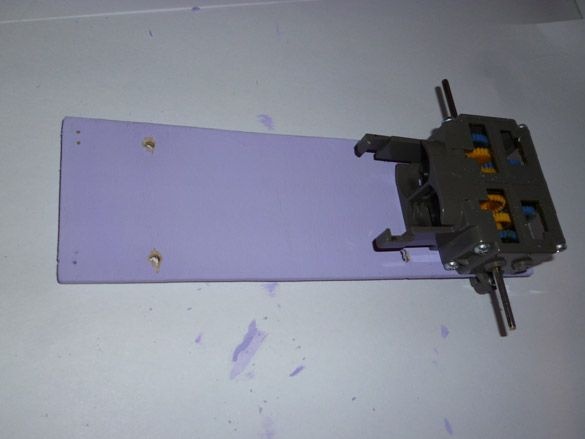
Og lidt større:

Derefter fastgør vi sidedelene ved hjælp af hjørner fra en børnejernskonstruktør og 3x20 mm bolte til dette:

Nu skal vi installere sporene. Vi tager detaljerne i de afsluttende spor. Vi indsætter 3x40 mm bolte i hullerne. Vi satte et stort hjul på den forreste bolt, på de tre nederste tre, derefter skiverne og stram møtrikkerne, men ikke stramme, så alle rullerne drejer frit. Vi lægger store tandhjul på akslerne på gearmotoren. Vi kombinerer alle bolte med ruller med huller på siderne. Efter at have passeret boltene, vikles og strammes vi møtrikkerne fra indersiden af sagen. Vi sætter sporene, kontrollerer, om de er stramme nok. Larver skal ikke falde, men for meget spænding vil skade dem. Justeringen udføres af forhjulet, bevæges det eller omvendt, flyttes det væk fra gearmotoren. Efter alle manipulationer får vi:

Vi tager motorerne, der følger med ruller og spor. Vi lodder til ledningens kontaktpuder og parallelt med dem en 0,1 mikrofarad-kondensator. Monter derefter motorerne i gearmotoren:

Lad os gå videre til batterierne. Vi lodder vores Li-ion 18650-batterier parallelt og udsender ledningerne for nemheds skyld. Drej dem med elektrisk bånd:

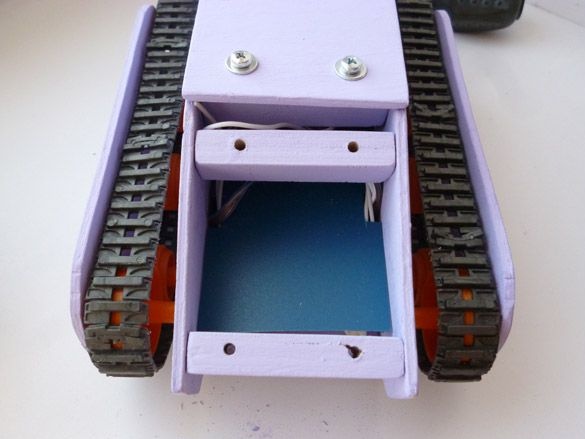
Vi placerer dem i bunden af sagen ved siden af motorerne:

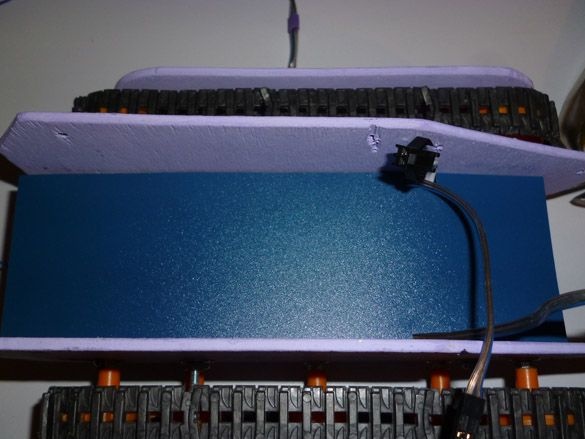
For nemheds skyld såvel som adskillelse af mekaniske og elektronisk dele, klip et rektangel på 100 x 54 mm ud af tynd plast eller pap. Placer den oven på gearmotoren og batterierne:
Vi tager fastgørelseselementer og installerer dem som vist på billedet. Vi fastgør til siderne ved hjælp af skruer:
På bagsiden af tanken fastgør vi rektangulære LED'er til varm lim. Rød og grøn:

Jeg bruger også varm lim til at fastgøre den forreste del med forlygterne:

Trin 4 Elektrik
Elektriske motorer forstyrrer deres drift, og der opstår et spændingsfald under opstart. Så at ved hver start af motorerne Arduino ikke overbelaster, deler vi strømforsyningen. Arduino drives af et 9-volt batteri af kronetypen og motorer fra batterier. Vi har allerede placeret batterierne, vi placerer kronen foran tanken:

Efter installation af batteriet skal du lukke det med det øverste låg:

Vi forbinder alt sammen i henhold til skemaet:

Jeg vil forklare lidt. Den venstre motor gennem føreren er tilsluttet 5 og 6 pin. Højre - til 9 og 10. Plus fra den røde LED gennem modstanden til 3 pin, minus til GND. Plus fra den grønne LED, også gennem modstanden, til 4 ben. Forlygter til 2 pin.
Betjeningen af Bluetooth-modulet udføres via SoftwareSerial-biblioteket.Vi bruger softwarekomporten. Forbindelseskontakter kan ændres på tegningen. Vi forbinder modulet som følger:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
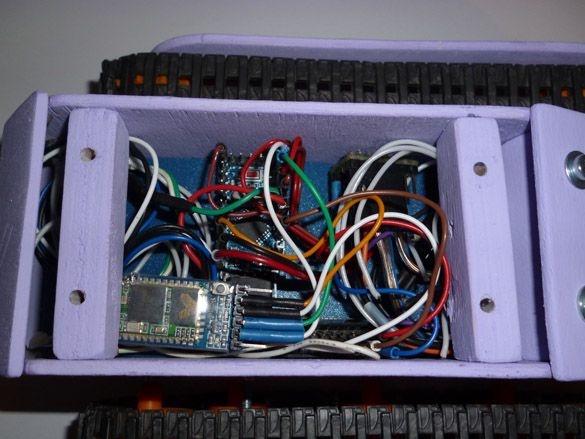
Ved at sammensætte det hele placerer vi en elektriker i den centrale del:
Trin 5-software.
For at arbejde med skitsen skal du downloade Arduino IDE. Vi fortsætter og downloader den nyeste version:
Derefter skal du tilføje biblioteket. SoftwareSerial skal allerede være i Arduino IDE. Men bare i tilfælde af, vil jeg sende det:
Hvis Arduino IDE, når kompilering af skitsen giver en fejl og sværger ved det manglende bibliotek, skal du pakke det downloadede arkiv ind i mappen "biblioteker", der er placeret i mappen med Arduino IDE installeret.
Trin 6 Forbered Bluetooth-modulet.
Standardindstillingerne for Bluetooth-modulet er forskellige fra det, vi har brug for. Derfor skal du først oprette forbindelsen til Bluetooth-modulet med computeren og ændre indstillingerne. Udfyld Send_ AT_Bluetooth-skitsen i Arduino:
Arduino fungerer som et link mellem Bluetooth og computeren. Start Arduino IDE, åbn portmonitoren. For HC-06 skal du vælge 9600 i portmonitorindstillingerne, NL og CR er ikke nødvendigt. Hvis der ikke er oprettet en Bluetooth-forbindelse med modulet, er den i indtastningstilstand til AT-kommando. Måske første gang modulet ikke svarer. Prøv derefter at overbelaste den ved at frakoble og tilslutte plus-ledningen igen. Alle kommandoer indtastes uden tilbud, glem ikke at trykke på enter for at sende. Vi indtaster følgende kommandoer:
"AT" - uden citater skal svaret "OK" komme.
“AT + NAVN
“AT + BAUD7” - indstil hastigheden til 57600.
“AT + RESET” - vi overbelaster modulet.
Hvis noget gik galt, eller ikke kan du huske indstillingerne:
“AT + ORGL” - returner modulet til fabriksindstillingerne.
Trin 7 Udfyld skitsen.
Efter installation af Bluetooth-modulet skal du fortsætte med at udfylde hovedskitse:
Trin 8 Forbered din Android-telefon.
Før brug skal du sikre dig, at din Android-telefon eller -tablet har et accelerometer. For at komme i gang skal du tilføje en Bluetooth-enheds-tanchka i Android. Vi går ind på Bluetooth-indstillingerne, finder det Bluetooth-modul, du har navngivet, og tilslut. Adgangskoden til forbindelsen er “1234” eller “0000”, den kan være forskellig for forskellige modeller. Installer nu kontrolprogrammet. Vi har brug for en Arduino Bluetooth RC-bil eller BT-controller. Begge programmer er gratis, de har evnen til at kontrollere Bku Bluetooth-enheden gennem accelerometeret, og de er i Google play. Download det program, du kan lide, på din telefon eller tablet. Indtast følgende kommandoer i menuen med programindstillinger:
W - frem
S - tilbage
A - venstre
D - ret
F eller G– stop
K - forlygter
L - forlygte slukket
Du kan også bruge joysticket til at kontrollere tanken. Det kan fremstilles i henhold til min anden instruktioner.
Og tilføj et Bluetooth-modul til det efter et andet instruktioner.

