I dag vil jeg dele min næste homebrew kvist. Det er baseret på Lego og Arduino. Til kontrol bruger vi en fjernbetjening med en 433 MHz sender. Denne gang ville jeg lave en racing en bil. Lad os starte:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- 433 MHz radiokommunikationsmodul
- Motorreduktion 200 o / min med en akseldiameter på 3 mm
- 2 lysdioder
- 2 modstande 150 ohm
- Kondensator 10v 1000uF
- 2 enkeltrads kamme PLS-40
- 2 PBS-20-stik
- Induktor 68mkGn
- 6 NI-Mn 1,2v 1000mA batterier
- Forbindelse far-mor to pin til wire
- Homutik
- Ledninger i forskellige farver
- lodning
- Rosin
- loddejern
- Bolte 3x40 og møtrikker og skiver til dem
- Bolte 3x20
Trin 1 samles sagen.
Det er nødvendigt at samle vores maskine i henhold til Lego-instruktion 42022 den anden mulighed med en vis forfining. Vi udfører alle handlinger fra side 3 til 6. Vi har ikke brug for en gearmekanisme. Lego-motoren behøver heller ikke at samles. Du har dog brug for motorophæng, der er samlet på side 14-19, undtagen gear og aksler. Dernæst samler vi alt fra side 20 til 74, bortset fra håndtaget på side 25.
Trin 2 mekaniser kroppen.
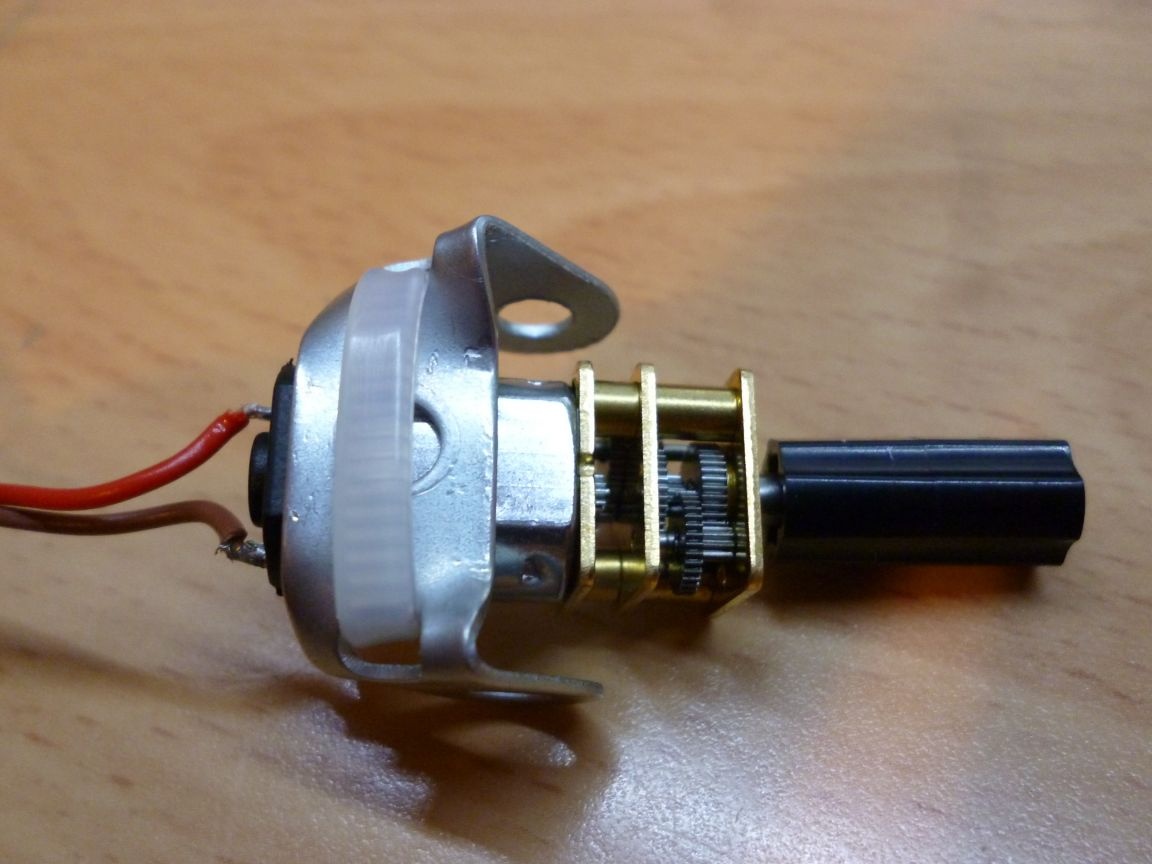
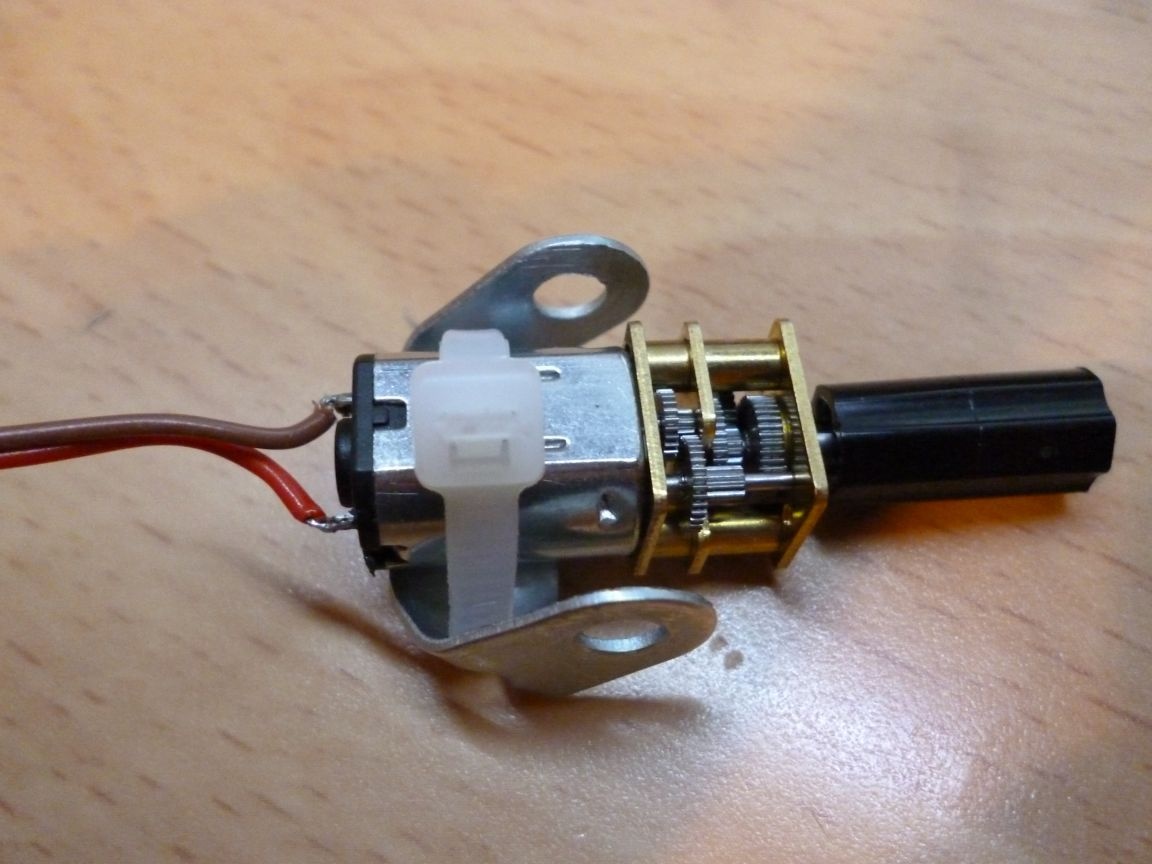
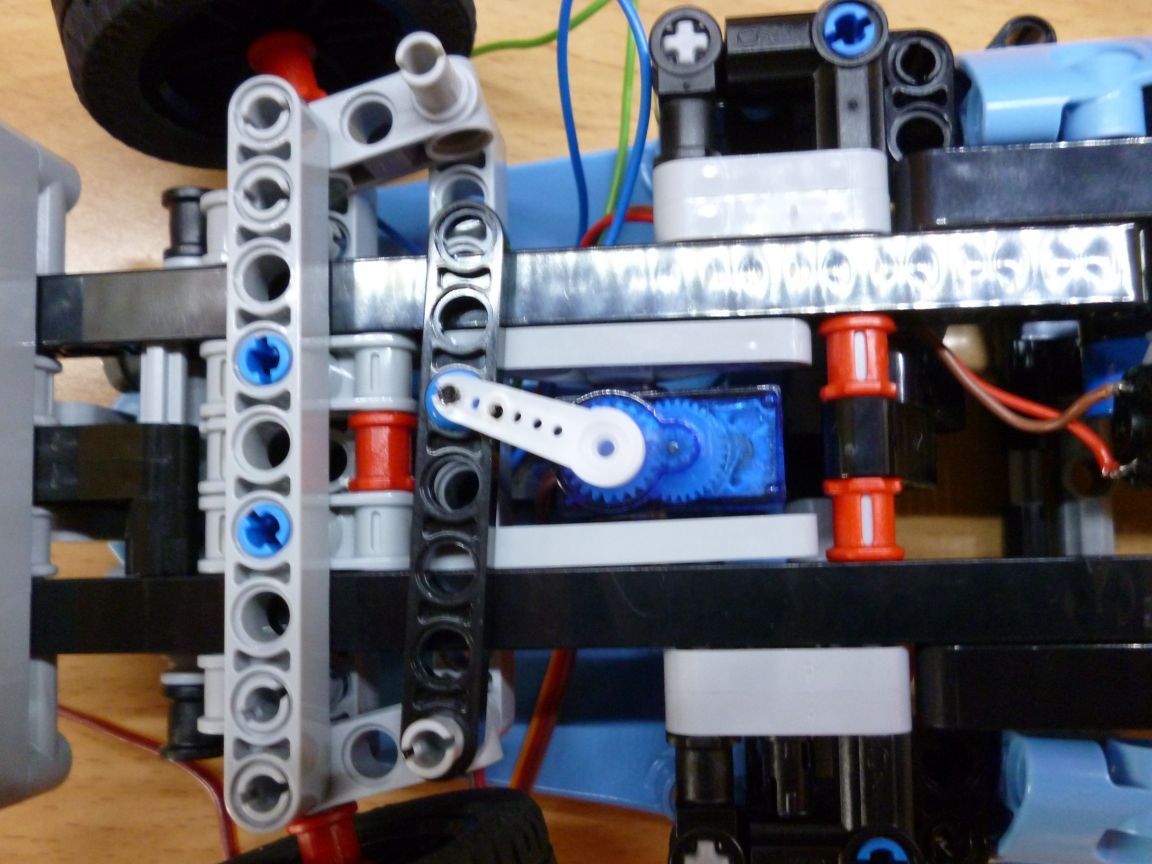
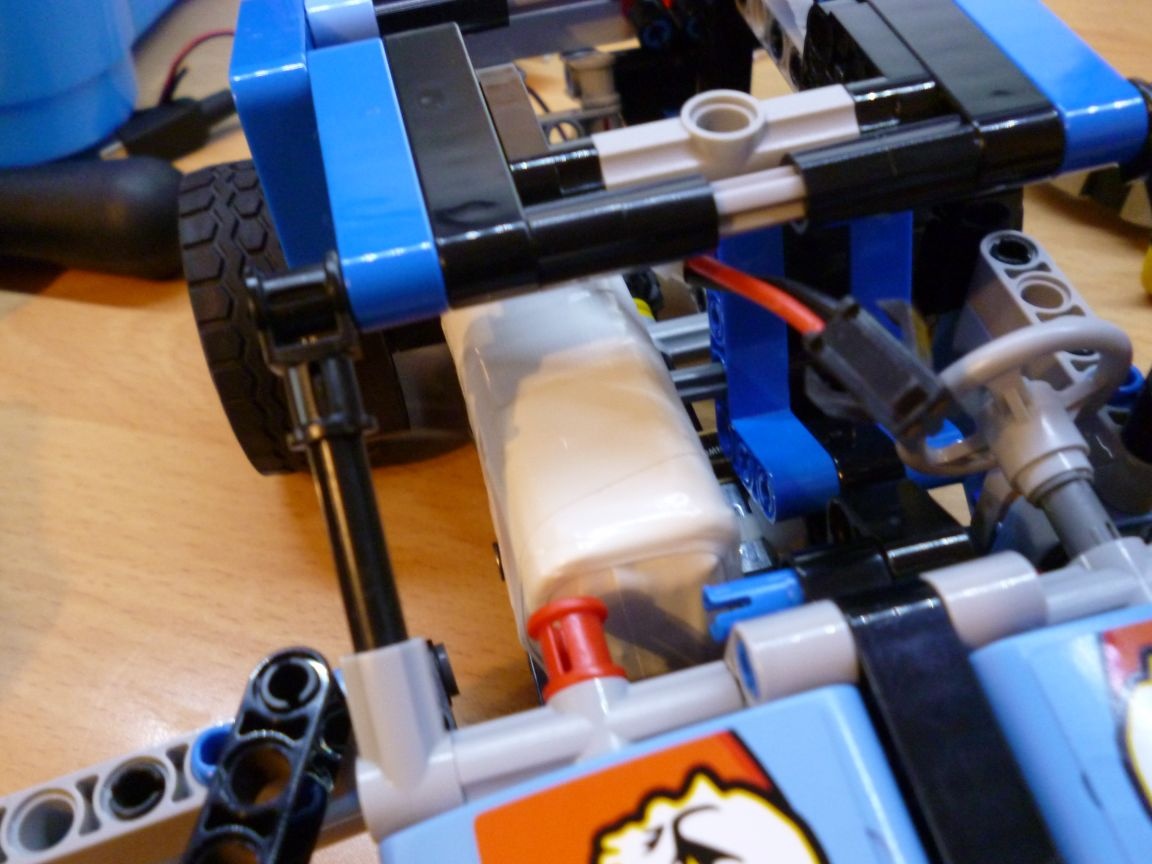
Sæt i gang vores modellen der vil være en gearmotor med en hastighed på 200 o / min. Kan bruges med et andet gearforhold. Men efter min mening er dette den bedste mulighed. Ved 100 o / min - for langsomt, 300 o / min - er der ikke nok strøm, og motoren er meget varm. På gearmotorens skaft skal du sætte på "Legovskaya" -forbindelsesmuffen og sikre den mod at dreje matchen med en trim. For at fastgøre vores motor på modellen er det nødvendigt at bøje delen fra metalkonstruktoren med bogstavet “P” og fastgøre gearmotoren til pladen med en klemme. Resultatet skal være følgende:
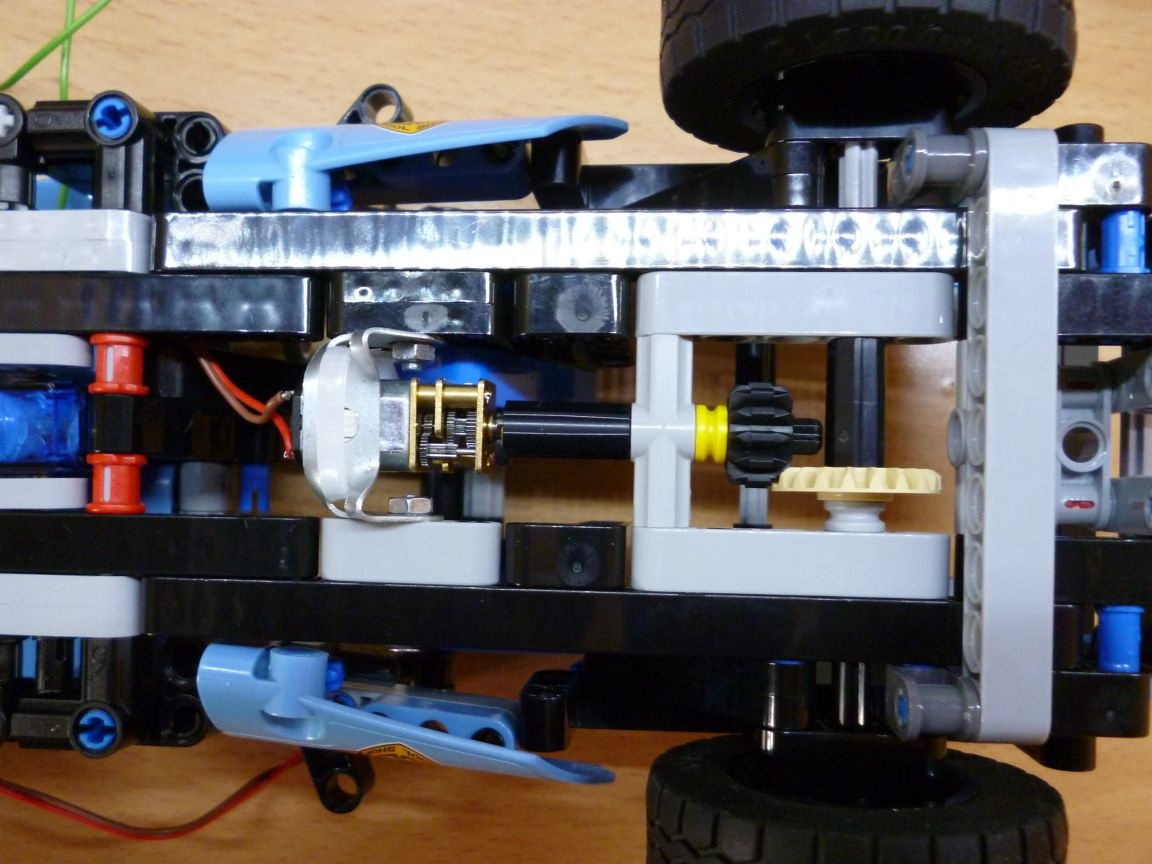
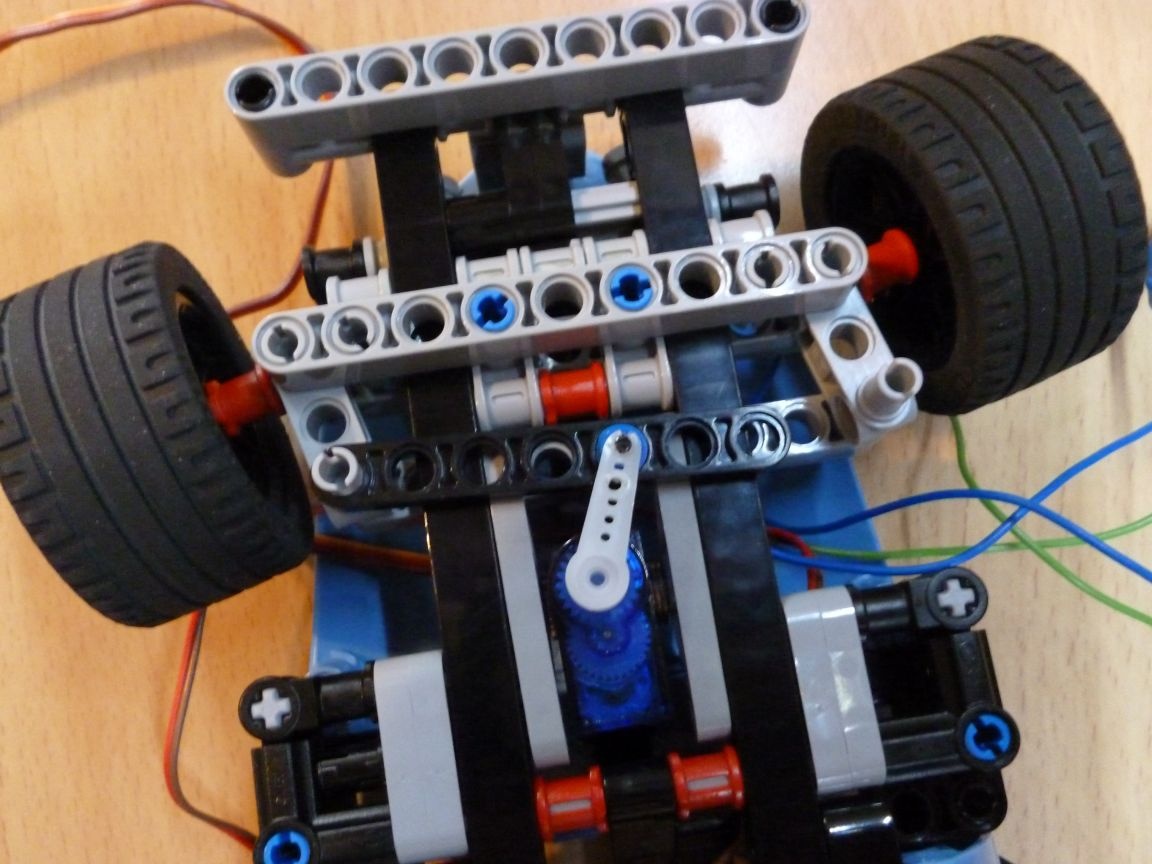
Ved hjælp af 3x20 bolte fastgør vi vores motor til modellen. Spænd ikke for meget! Ellers kan du skade Lego-konstruktørens dele. På modellen ser det sådan ud:
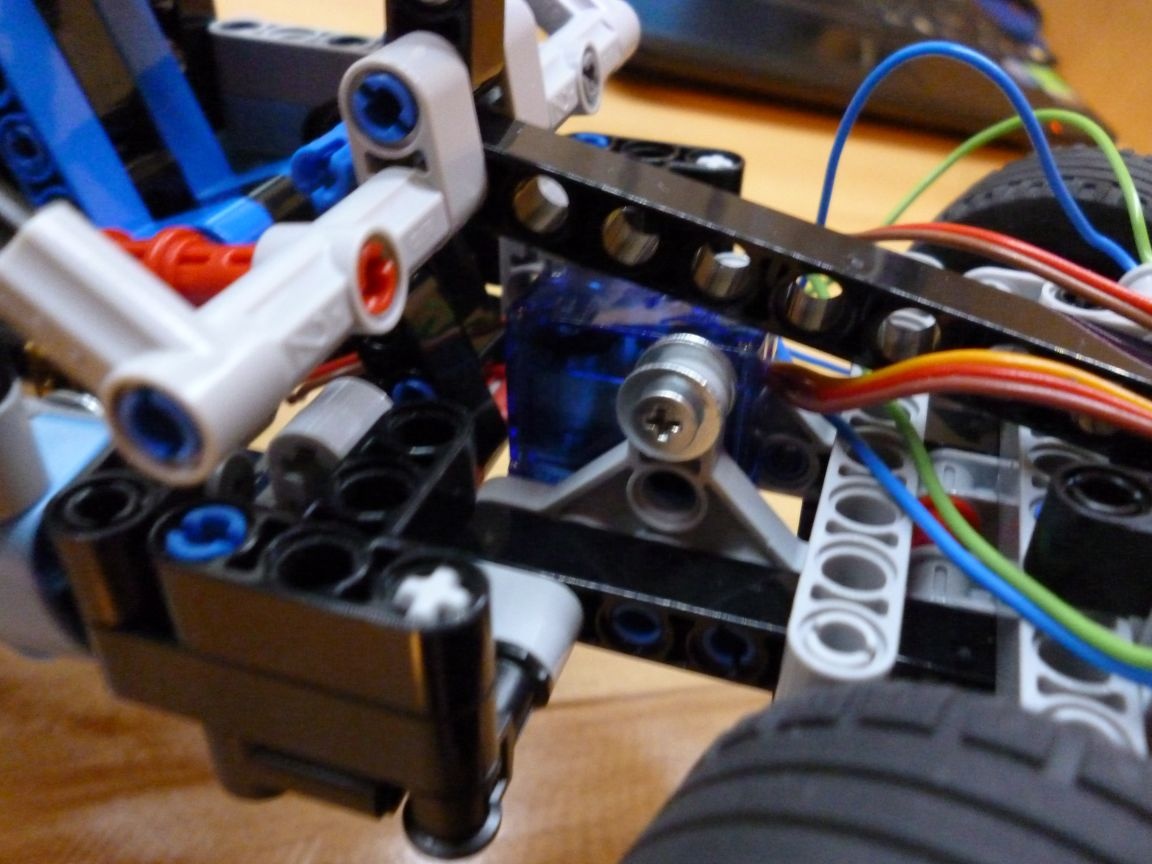
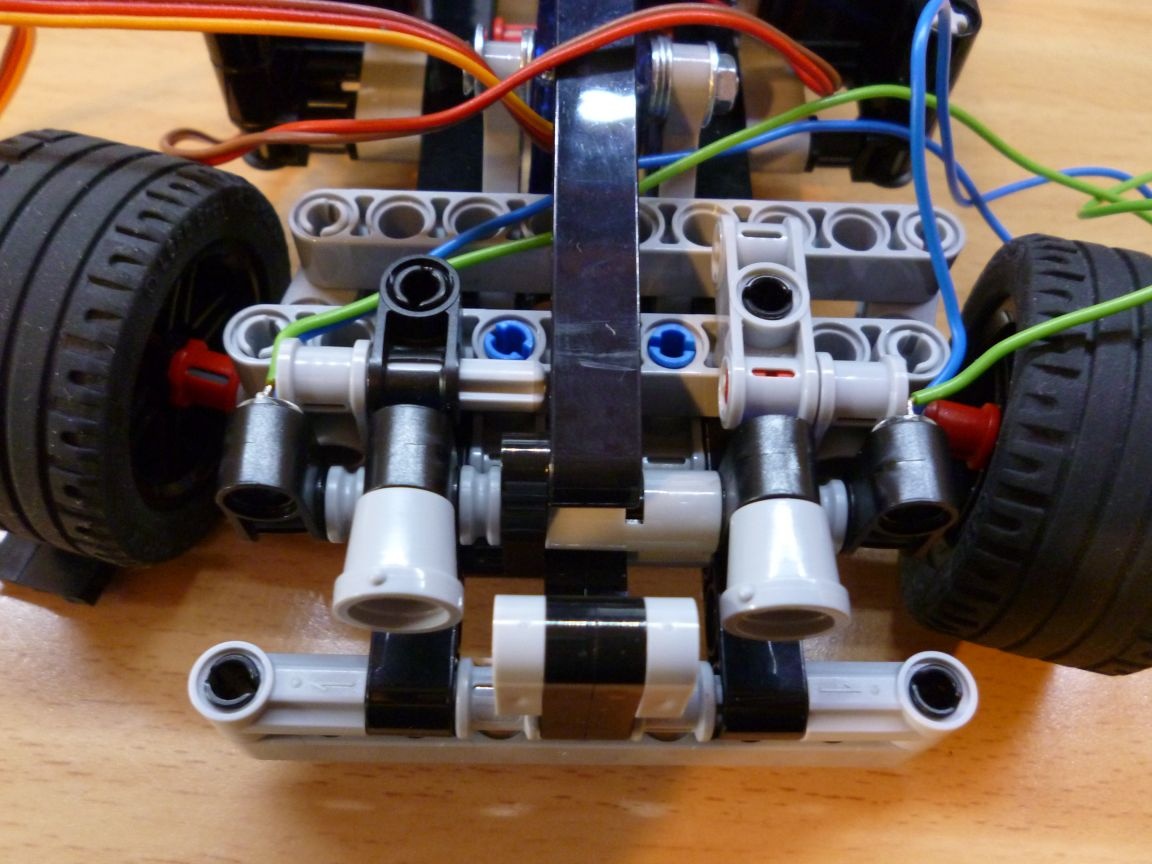
For at dreje, skal du tage en let modificeret servo SG-90. Kufferten skal bores omhyggeligt for ikke at røre ved de indvendige dele, det gennemgående hul med en diameter på 3,2 mm eller blot skære med en brevpapirkniv.

Vi sætter en bolt i hullet, og på kanterne lægger vi trekantede plader og fastgøres med møtrikker. Vi sætter håndtaget på servoakslen og fastgør delen til Lego-håndtaget. På en skrivemaskine ser det sådan ud:
Trin 3 er en elektriker.
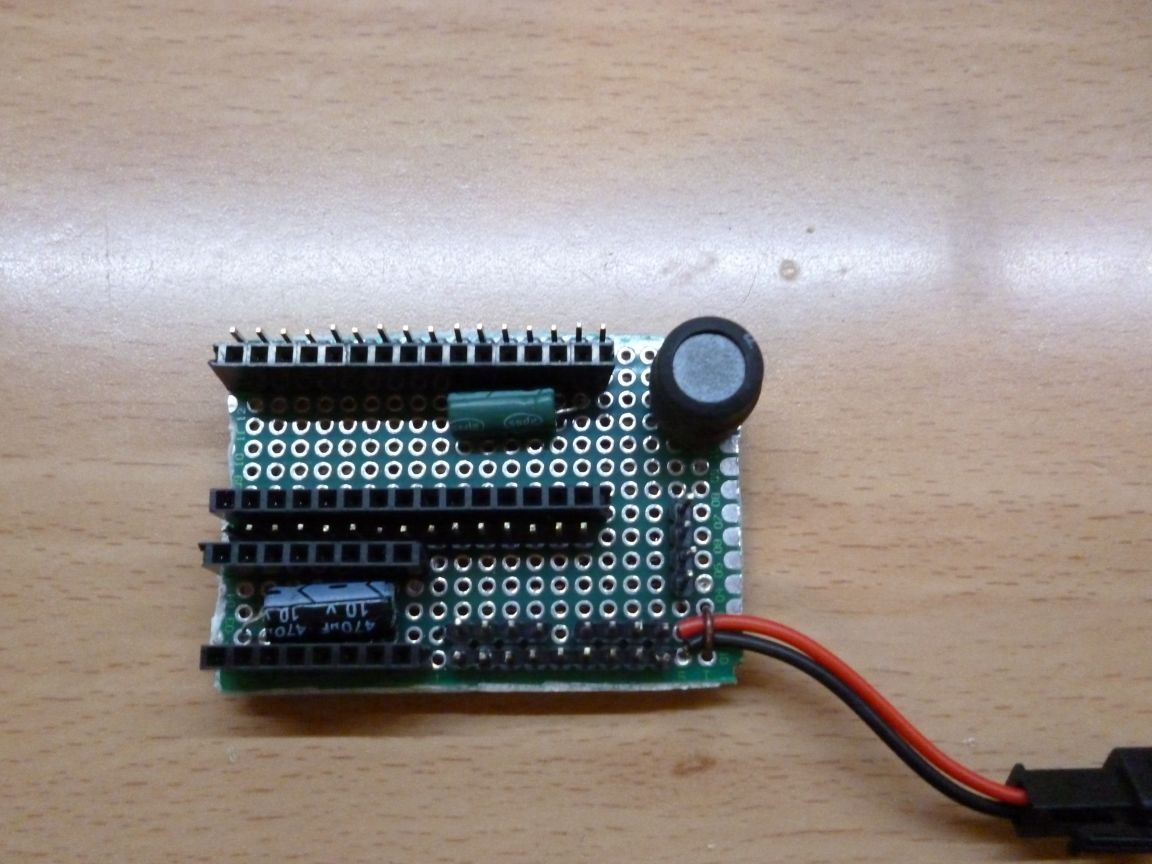
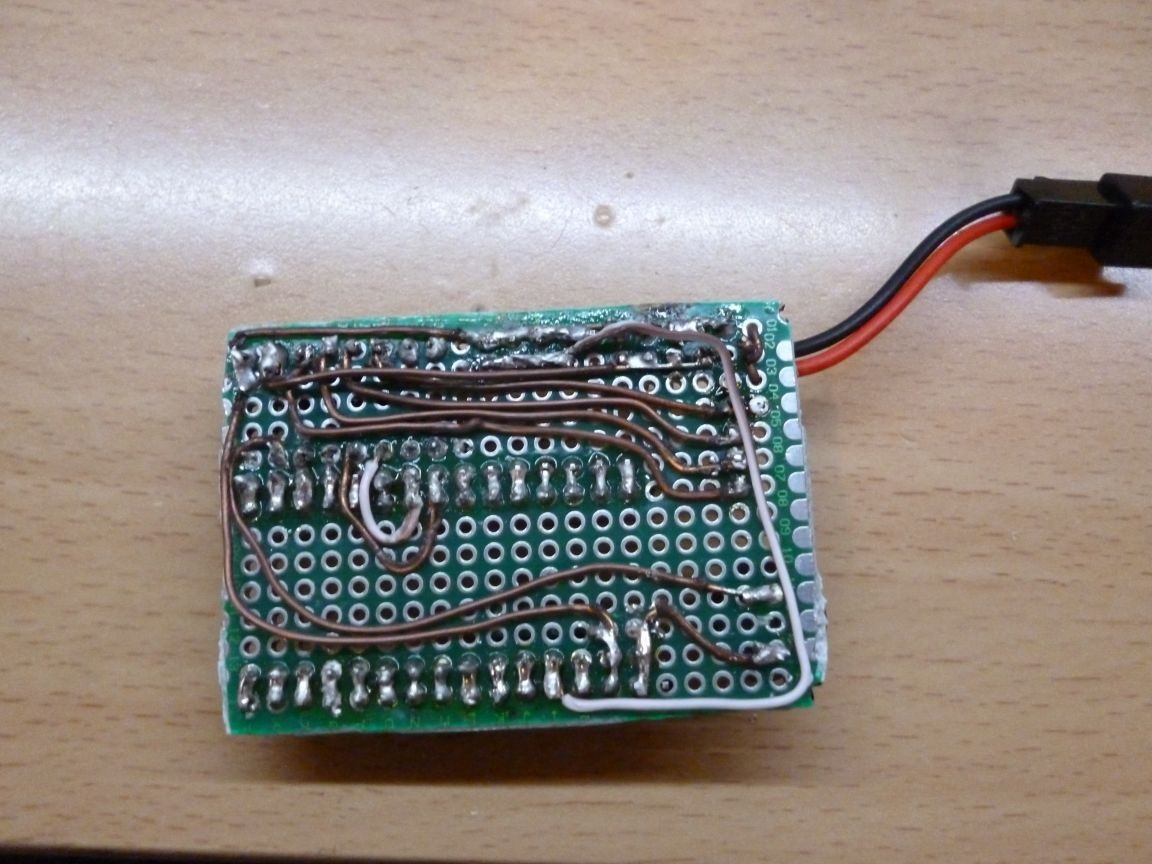
Loddejern i hånden og gå. Al elektronik kan samles ved blot at tilslutte monteringsledningerne. Men dette er ubelejligt, da det kræver meget plads. Derudover er der en stor sandsynlighed for kontakt af dårlig kvalitet. Derfor er det bedre at lodde alt på kredsløbskortet i henhold til følgende skema:
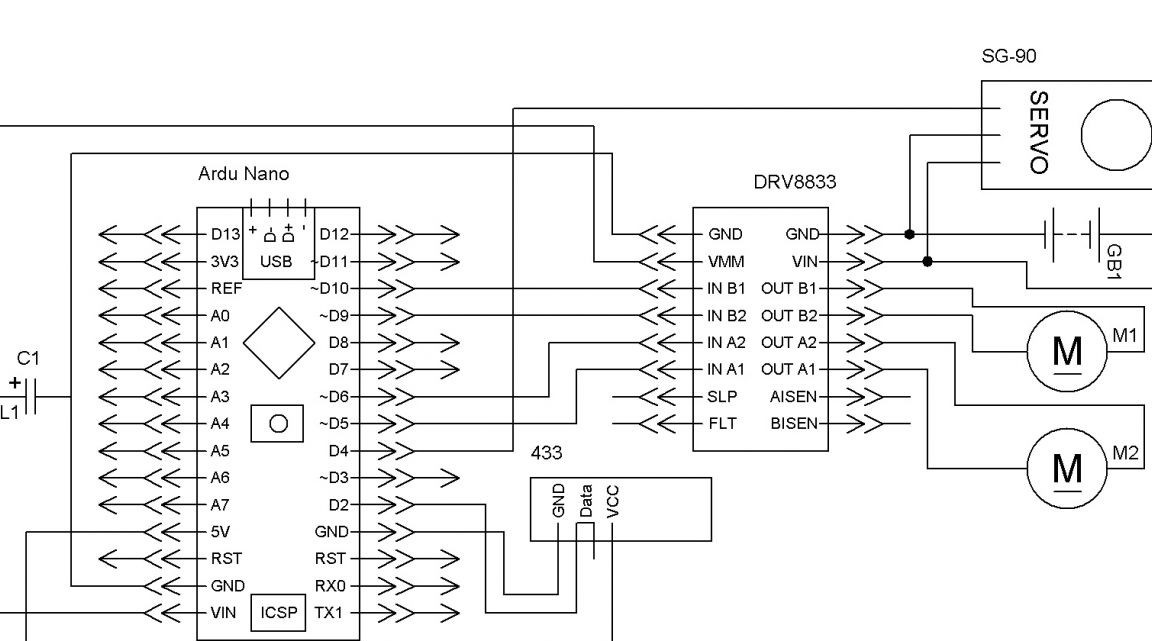
Jeg bringer en smule klarhed: Du kan tage en hvilken som helst laveffektkondensator, du kan også finde en induktor af enhver art, dette er nødvendigt for at stabilisere spændingen på mikrokontrolleren. Antennen skal loddes til modtageren. Jeg fik følgende:
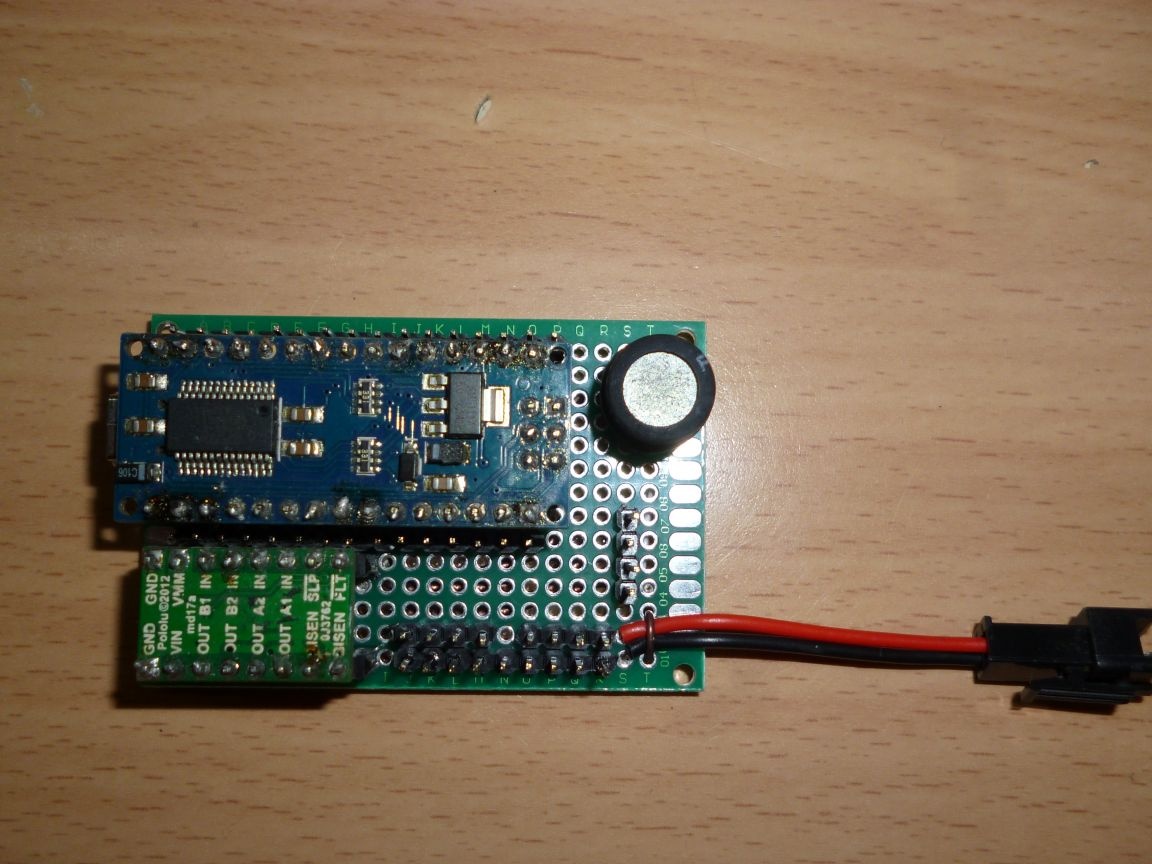
Vi sætter Arduino Nano og DRV 8833 på deres steder:
Til strøm vil vi bruge 6 Ni-Mn 1.2v 1000mA-batterier, loddet i serie og viklet med elektrisk bånd. Lim dem på et dobbeltsidet klæbebånd-passagersæde.

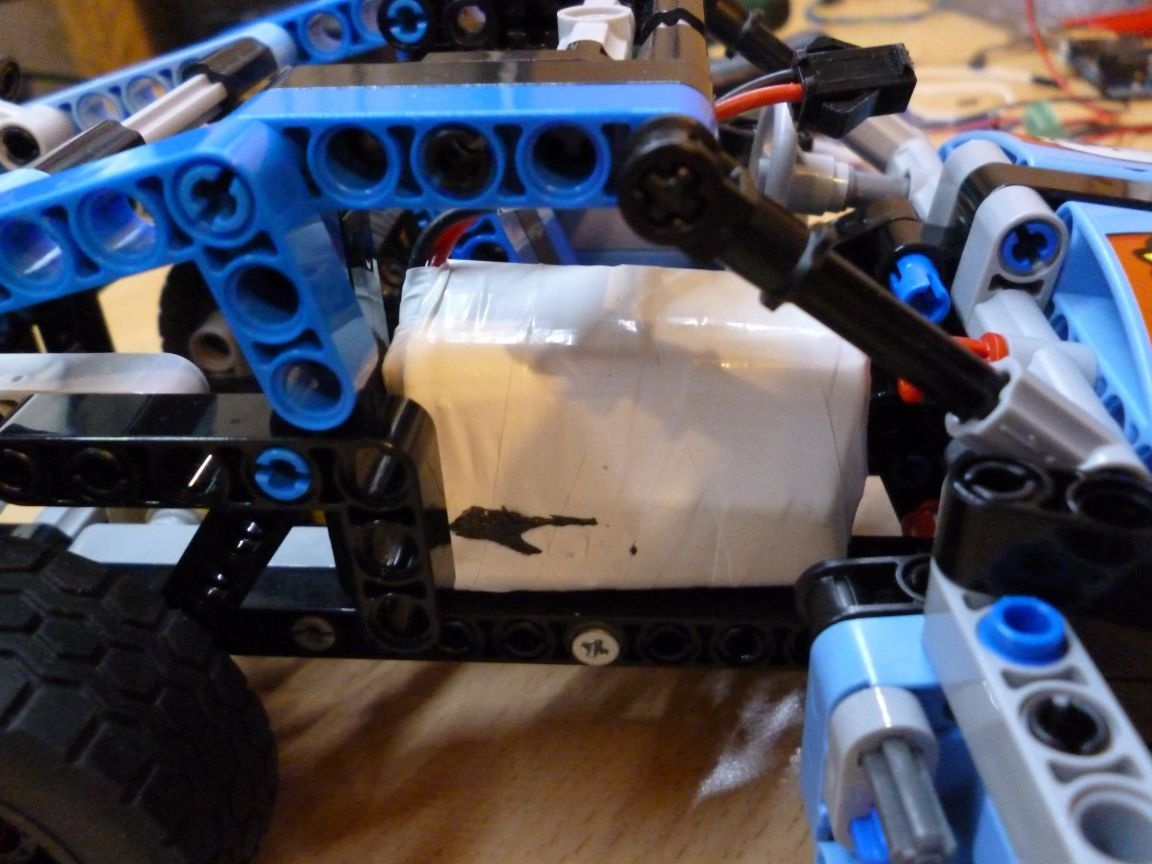
Vi forbinder alt efter skemaet og installerer på bagsiden af maskinen. Du kan også tilføje et par lysdioder. Sæt dem i forlygterne og tilslut til stift 14 (A2).
Trin 4 firmware.
For at skrive firmwaren brugte jeg Arduino IDE. Den aktuelle version i skrivende stund er 1.8.1. Det er praktisk at implementere kommunikationsprotokollen ved hjælp af 433 MHz-modulet ved hjælp af rc-switch-2.52-biblioteket. Du skal downloade det og tilføje det til mappen "biblioteker" på Arduino IDE.
Vi forbinder Arduino og blitzer den med følgende firmware:
For at teste ydelsen af vores model har vi brug for et andet Arduino-bord. Det er nødvendigt at tilslutte en 433 MHz radiosender til det andet kort. Senderen er tilsluttet som følger:
VCC (sender) til 5+ (Arduino),
GND til GND,
DATA til D10.
Skriv den ændrede SendDemo-skitse der. Det er i eksemplerne på biblioteket, vi installerede, og tjener til at sende kommandoer. Før du blinker skitsen, skal du ændre den lidt, nemlig ændre de transmitterede kommandoer. Afhængig af hvad du skal kontrollere, skriv følgende kommandoer til sendelinjen:
“1” - bevægelse fremad (skriv en kommando uden anførselstegn!)
"2" - bagudbevægelse
“15” - fuld stop
"3" - drej rattet til venstre
"4" - drej rattet til højre
"5" - indstil rattet i midten
"10" - tænd forlygterne
"11" - sluk forlygterne
At fremstille en fjernbetjening med en 433 MHz radiosender er et emne for en separat artikel. Jeg vil bestemt skrive instruktionerne til fremstilling af en sådan fjernbetjening.
Jeg vil sige, at denne mulighed er velegnet til næsten enhver model af Lego-biler. Det er nok at forbinde alle mekanikerne og finde et sted til tavlen. Og hvis du inkluderer fantasy, kan du mekanisere enhver model.