

Oprettelsen af projektet begyndte i februar 2015. første roboten linjen med "Antei" var "Domovenok" - en robotbørste. Senere optrådte "Antei 1".
Anteya-platformen er en sag udstyret med en controller Arduino Uno, sensorer og instrumenter til forskellige funktioner. Antei kan også blive en støvsuger, en husholdnings-mejetærsker, en vagterrobot osv.
Men det vigtigste ved Antey er løsrivelsen af "myrer", der bevæger Antey.
Princippet for drift af vores kompleks blev taget fra selve naturen. Hver såkaldt myre kan bevæge sig uafhængigt, men er også i stand til at udføre kollektivt arbejde. På samme tid er de i stand til ikke kun at løfte belastningen meget tungere end deres vægt, men også vide, hvordan de flytter sammen utroligt store belastninger til dem.
Hver af vores myre er udstyret med en vibrationsmotor. Dette er en temmelig uudforsket form for fremdrift. Dens fordele er åbenlyse. For det første er denne type fremdrift mere økonomisk i energiforbruget. For det andet er det kompakt i modsætning til andre typer motorer, men det giver anstændig ydelse.
Vi fandt ud af, at hver "myre" med en vægt på 8 gram. kan trække 89 g., hvilket indikerer, at han er i stand til at bære vægt 11 gange sin egen.
Siden oprettelsen af Antei har der været et spørgsmål om antallet af vibrationsmotorer, hvordan de er placeret på robotens platform, og ud fra hvad benene på myrer (en tandbørste eller gummiben) skal laves. Der er prøvet mange muligheder.
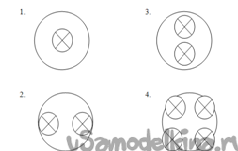
Men det blev besluttet at etablere 2 rækker med 3-4 myrer på gummiben på hver side af platformen, mens de skal være i en stiv kobling med hinanden.
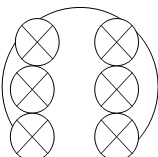
I denne udførelsesform opnås en selvsikker bevægelse fremad, og når visse motorer er slukket, udføres en drejning til siden.


Vores Antey
