
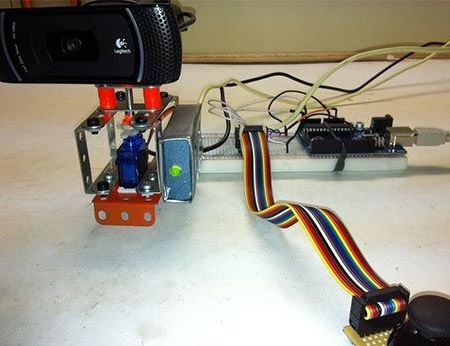
Denne artikel vil tale om, hvordan man bruger Arduino kan styre webcam. Mere præcist vil kontrollen være et servo-drev, der er installeret i rammen fra den designer, som webcam allerede er knyttet til.
Materialer brugt af forfatteren til at oprette denne enhed:
1) metalkonstruktør
2) kold svejsning
3) webcam
4) servo
5) LED'er
6) Arduino
8) joystick fra PS3
Overvej mere detaljeret design og hovedpunkter ved at oprette en enhed til styring af kameraet.
Forvirret over spørgsmålet om, hvordan man bruger en så praktisk Arduino-platform ud over standardfunktioner såsom blinkende lys. Når han havde haft en samtale via Skype med en kollega på arbejdet, kom forfatteren med en interessant idé. Hvad hvis du giver hans kolleger mulighed for at kontrollere et webcam og se, hvad der sker på kontoret. Ikke før sagt end gjort, og forfatteren begyndte at arbejde med implementeringen af denne idé.
Oprindeligt studerede forfatteren de vigtigste materialer i artikler, hvor en joystick blev brugt til at styre enheder oprettet på Arduino-platformen. Efter at have forstået materialet i disse artikler, forstod forfatteren, at han kunne bruge den gamle joystick fra PS3 til at kontrollere bevægelserne af servoen fra ham.
Fra begyndelsen af bygningen besluttede forfatteren at opbygge en ramme, hvor servodrevet og selve kameraet vil blive placeret. For ikke at komplicere opgaven besluttede forfatteren at bruge den sædvanlige metalkonstruktør, som han købte i en sparsommelig butik.
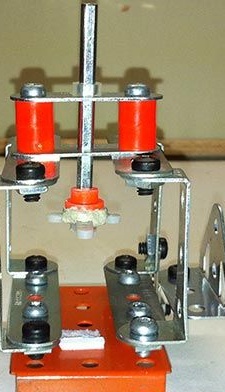
Idet man tog detaljerne i denne konstruktør, viste det sig at skabe en sådan ramme for den fremtidige enhed:
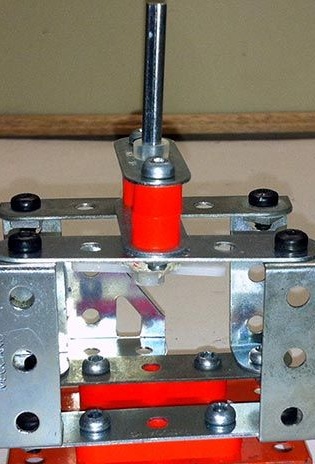
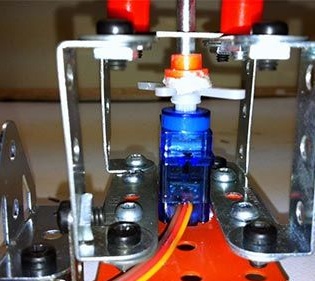
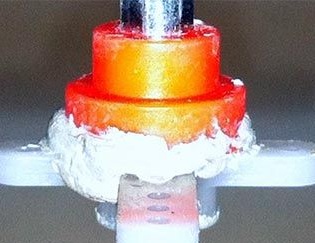
Et servo-drev blev installeret inde i rammen. Som det kan ses på billedet, passede det perfekt i den oprettede ramme. For at fastgøre servoen på rammen brugte forfatteren dobbeltsidet bånd. Ved hjælp af kold svejsning blev servo akslen forbundet til gearet, der styrer platformens bevægelse med kameraet.
Det er vigtigt at sikre, at transmissionskonstruktionen er lavet, så der ikke er unødvendig belastning.
Derefter begyndte forfatteren at installere webcam. Der blev brugt et Logitech-kamera, der bruges på kontoret for det firma, hvor forfatteren arbejder. På grund af det faktum, at kameraet ikke hører til forfatteren, demonterede han det ikke og fjernede modvægten, skønt dette ville forenkle designet til det fremtidige udstyr.

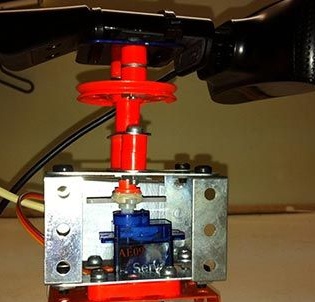
For på en eller anden måde at kompensere for kameraets vægt og fordele det i midten af strukturen brugte forfatteren 2 tykke pakninger. De giver dig mulighed for at flytte kammerets vægt fra servoakslen til hovedrammen og undgår også tryk fra akslen på selve kammeret.
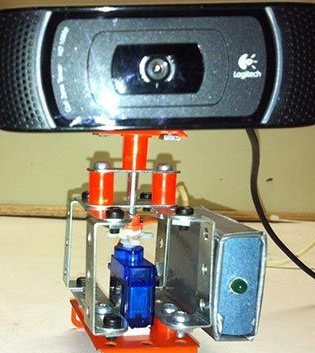
Kameraet er monteret på en speciel rund platform, der er baseret på en aksel, der kommer fra servodrevet. På denne måde realiseres kamerastyring ved hjælp af en kryds transmission.
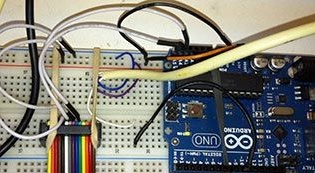
Efter at den mekaniske del af strukturen var klar, tog forfatteren den op elektronisk udstopning.
Til at begynde med besluttede han at forbinde servoer og LED'er, der viser systemets status.
Selve servoen har 3 ledninger: -GND, + 5V og Signal. Forfatteren brugte 9 stifter til at indse evnen til at kontrollere drevet. For at lave en drevaktiveringsindikator installerede forfatteren en diode, der er forbundet til to ledninger: + 5V og GND med en modstand på linjen + 5V.

Derefter, på baggrund af artikler på Internettet, forberedte forfatteren en ødelagt joystick fra PS3 for at kontrollere drevet.

Derefter hentede forfatteren et program til Arduino, takket være hvilket det bliver muligt at bruge joysticket og USB-porten til at kontrollere servoen. For at kommunikere med en USB-port brugte forfatteren modemstyring og en applikationsterminalemulator såsom Minicom eller Putty.
Dette program giver flere funktioner til styring af kameraet.
For at installere kameraet i midten 90 grader skal du trykke på "m", kameraet kommer også automatisk til denne position, når servo-strømmen tændes. For at dreje kameraet til venstre er det nødvendigt at trykke på "F" -tasten, og ved at trykke på "J" -knappen drejes kameraet til højre.
Du kan downloade programmet i slutningen af artiklen.
Da forfatteren ikke specielt udarbejdede designet til kamerarotationsenheden, begyndte det at have en række nogle ulemper.
For eksempel: da kameraet ikke er fastgjort i rammen, når det vippes, kan det falde fra platformen; da servo er ganske lille, skaber kameraets drejningsmoment yderligere rotation, hvilket igen deformerer servoen; huller til servo akslen er for store, så den er ikke statisk og udsættes også for belastning.
Derfor ønsker forfatteren fremover at opgradere enheden lidt som følger: Sørg for, at kamerarotationen styres af joystickens pile og ikke af knapperne; lette belastningen på servoen, når der drejes rundt.