

Dette projekt er ideelt for dem, der ofte glemmer at fodre deres fisk. Eller simpelthen ikke altid i stand til at gøre det til tiden. Når du har lavet en sådan feeder, kan du ikke bekymre dig om dine små kæledyr og endda føle dig fri til at rejse et stykke tid.
materialer:
- Arduino UNO eller en anden kompatibel mikrocomputer.
- Strømadapter 9V eller 12V.
- En 5V trinmotor fra et gammelt diskettedrev.
- Glat partition (brugt fra værktøjskassen).
- Håndtagskontakt fra en fasttelefon.
- Sagen fra harddisken (fungerer som en beholder til foder).
- Glat plade (f.eks. Plastlineal).
- Stativ fra et CCTV-kamera.
- Modstand 10 kOhm.
- Mekanisk vekselstrømsur.
Første trin. Sagforsamling:
Samlingsdesignet er vist i den første figur. Et hul er skåret ud på den ene side af harddiskens indkapsling. På denne del af feederen kan du endda bruge en plastflaske, men du bliver nødt til at komme med en støtte til den, så den holdes på hovedet.
Forfatteren bruger et stativ fra et CCTV-kamera, da det har en ideel højde til installation af en trinmotor under det. Det eneste, der blev tilbage, var at bore et hul i huset.
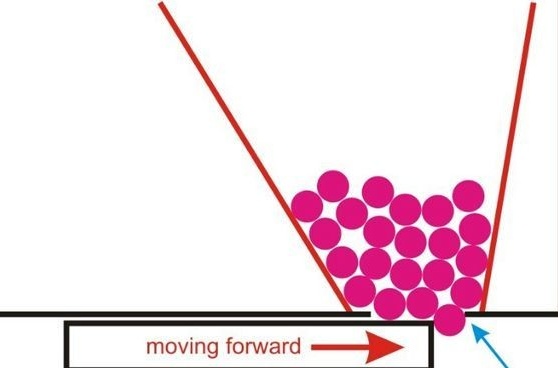
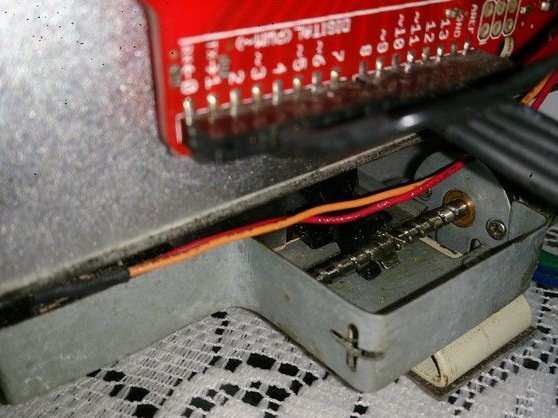
En 5V stepmotor med en drivmekanisme, der blev brugt til at bevæge drivlinserne, blev brugt til at bevæge dækslet. En glat skillevæg fra boksen blev placeret på toppen af objektivholderen, under hullet, hvor foderpillerne skulle forlade. For at gøre dette anbefales det også at bruge en ødelagt lineal. Efterlad en millimeter fra bunden af skroget, så foderpillerne kan passere gennem det lukkede låg.


Trin to Ændring af kroppen:
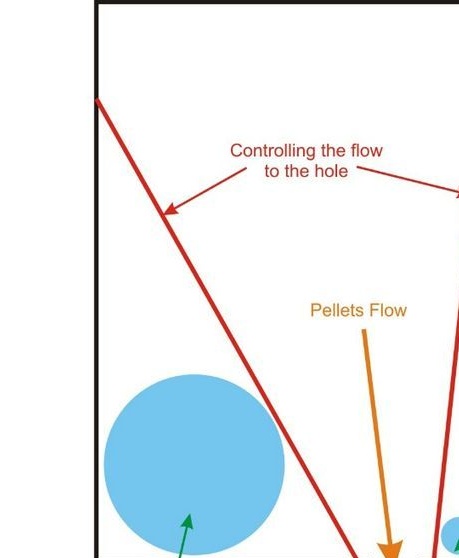
Følgende diagram viser, hvordan foderet skal passere korrekt gennem hullet, så pellets ikke lægger sig i foders udgangsvinkler.
Efter to dages brug forstod forfatteren, at noget af foderet sad fast, men ikke kom ud som tilsigtet. Derfor havde vi brug for en lineal eller en hvilken som helst glat plade, der passer ind i beholderen og i form af bogstavet V.

Trin tre elektronisk del af feederen:
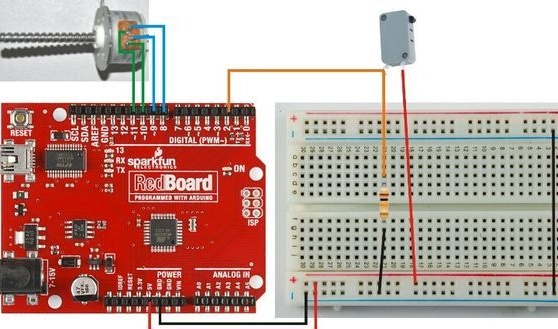
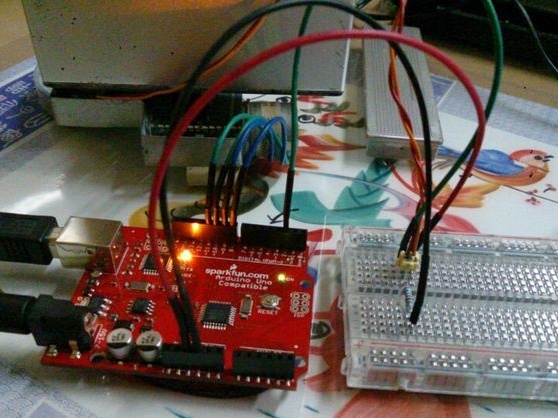
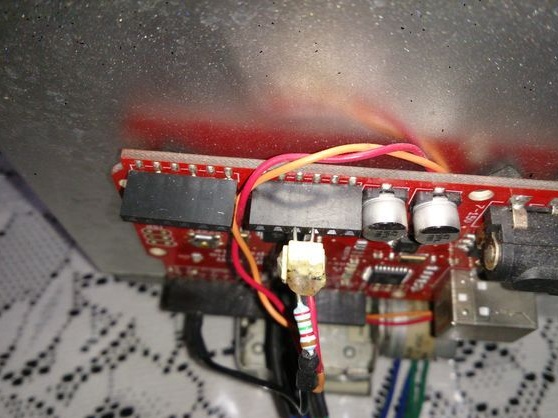
En trinmotor, en 10 kΩ modstand og en afbryder er installeret som vist på nedenstående diagram. For at lette forståelsen af betjeningen af kredsløbet og afprøvningen bruges en brødbræt, i den endelige samling mangler den (et eksempel på det sidste foto).
Fire motorledninger forbindes til digitale stifter 8-11. En fod af kontakten til 5V strømudgang. Det andet ben er på sin side forbundet til jorden ved hjælp af en 10 kΩ modstand og er også forbundet til en digital pin 2.
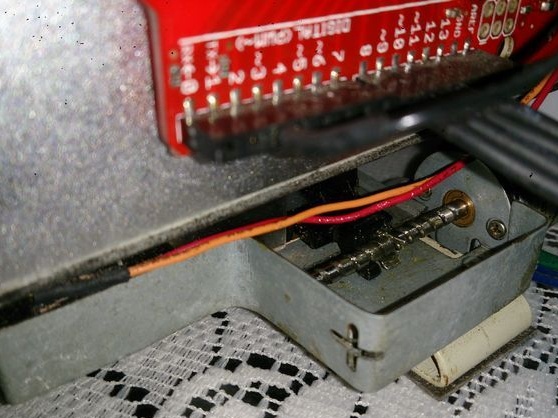
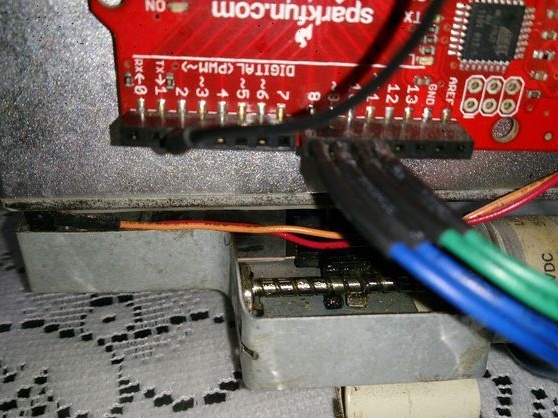
Kontakten placeres foran det bevægelige dæksel, og metaldelen er bøjet, hvorved der dannes en stopper (rød og orange ledning i det tredje foto). Når kontakten bevæges fremad og trykker på stop, registrerer Arduino en HØJ-værdi og stopper motoren.
Brættet er fastgjort på bagsiden af sagen med elektrisk bånd, og stikket med en timer på sin side. De bruges til at balancere kroppen, så den forbliver i den rigtige position.
Arbejdstest hjemmelavet uden madbeholder:
Den følgende video viser betjeningen af en fuldt samlet enhed. Som du kan se, er den første feedoutput korrekt. Ved den anden udgang af foderet kan det ses, at hvis granulaterne sidder fast, og låget ikke lukker ordentligt, så bevæger det sig fremad og tilbage, indtil det lukker korrekt.
Programkode: