Carpet Crawler er en lille robot, der tilhører BEAM-klassen. sådan robotter omgående med to sådanne elementer som æstetik, biologi, elektronik og mekanik. Takket være denne tilgang efterligner sådanne robotter levende væsener så meget som muligt, nogle gange ser det ud til, at de er i stand til at tænke.
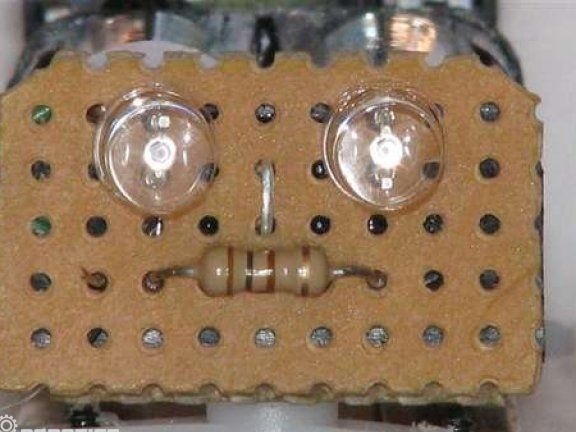
Som hjerne for sådanne robotter anvendes relæer sensorer og switches og bevæger sig hjemmelavet produkt på grund af servomotoren. AAA-batterier bruges som strøm. Da øjnene, der brænder lyst, er to lysdioder installeret.
Materialer og værktøjer til fremstilling:
- messingstrimmel, der måler 1/32 "x 1/4" x 8 "
- to stykker kobberstrimler;
- M2 nødder og bots;
- servomotor (Micro RC (7,5 g));
- to mikroskift (kan fås fra gamle drev);
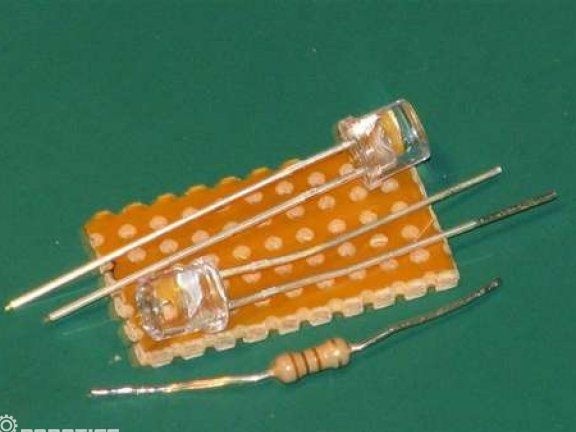
- to lysdioder (det er bedst at bruge rød, fordi hvid eller blå i dette tilfælde kan fungere);
- en 100R modstand (hvis lysdioderne er gule eller grønne, så 47R);
- to AAA-batterier og en holder til dem;
- tynd ledningsføring.




Fremstillingsproces:
Første trin. Ændring af servomotoren
Servomotoren er konstrueret på en sådan måde, at den under drift udfører impulsive bevægelser. I dette tilfælde skal det gøres om, så det fungerer ved rotation. Der er to måder at gøre dette på.
I det første tilfælde kan du gemme hastighed og retning fra motorstyring såvel som kontrolelektronik. Enheden har stadig brug for indgående pulser for at fungere.
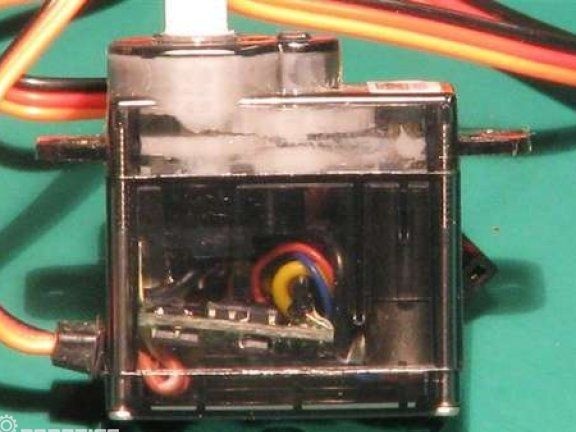
Forfatteren gik den anden vej. Det er nødvendigt at afskære gearelementets stopelement. Derefter skal gearene indføres, det vil være vanskeligt at samle dem tilbage, hvis sekvensen går tabt. Ved demontering skal servomotorens overflade smøres med silikone-fedt.
Billedet viser RSV-kontrolmekanismen, der skal flyttes.

Efter fjernelse af tavlen skal den røde ledning skiftes til nøjagtigt den røde ledning i motoren. Ledninger skal omhyggeligt indpakkes med elektrisk tape for at undgå kortslutning.

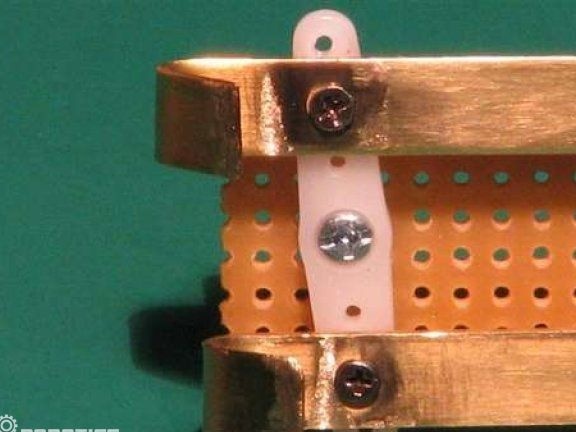
Trin to Opret den mekaniske del
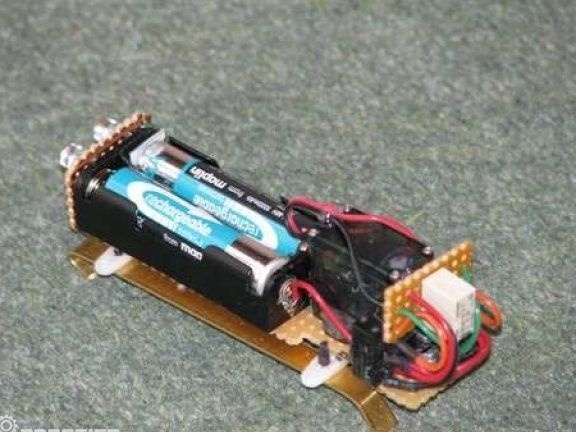
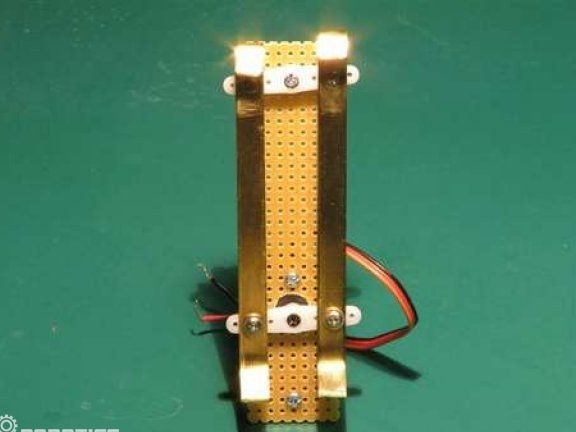
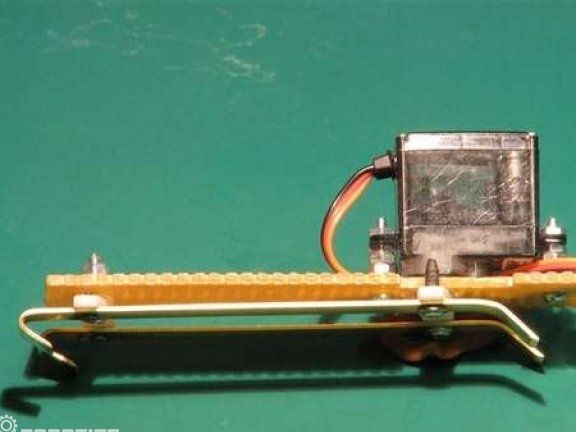
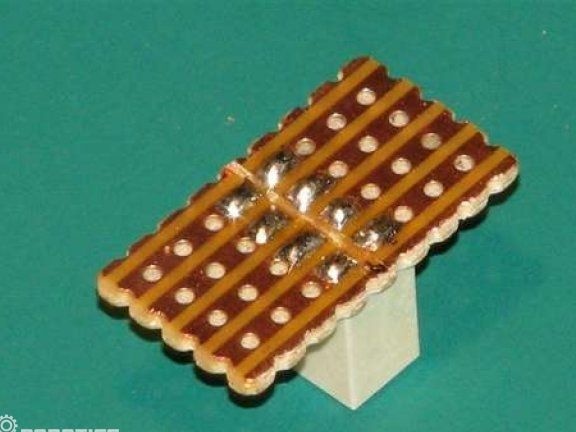
I arbejdsbordet skal du bore flere huller og derefter installere relæet på bagsiden af batteriet.Til montering af servo-drevet bruges 2 mm bolte.
Robotens ben er lavet af solide kobberplader, for dette skæres de først i stykker af en given længde og laver bøjninger. Takket være sådanne afbøjninger vil roboten klamre sig fast på vejen og gennemgå. Fastgør pladen med små skruer.


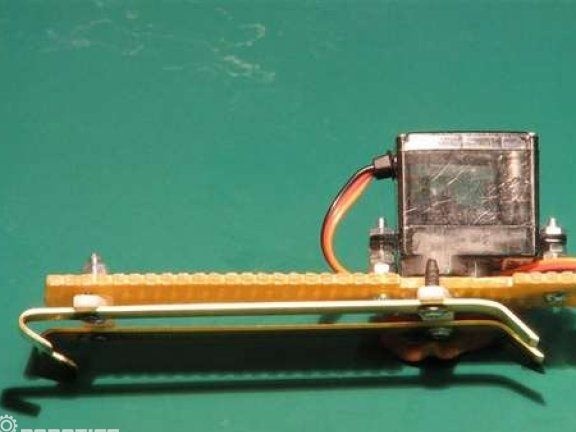
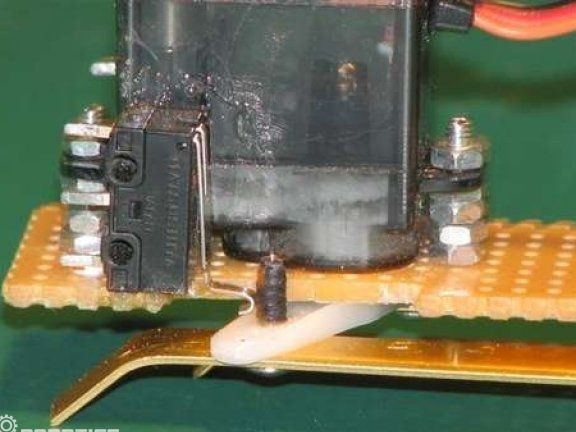
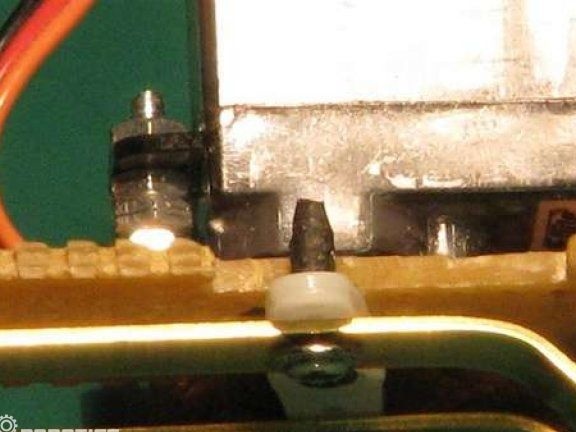
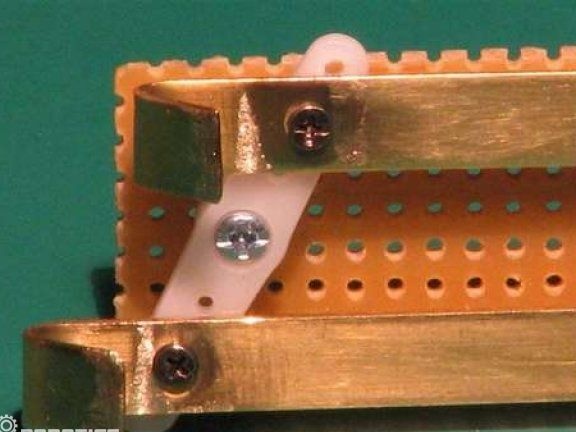
For at kontrollere benene skal du indstille switchene. De er fastgjort til servomotoren med lim.
Trin tre Robot elektronisk kredsløb
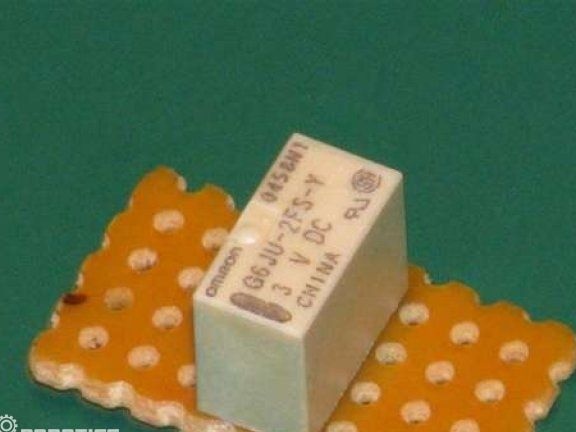
Hovedkomponenten i arbejdet med hjemmelavet kan betragtes som en relælås, der fungerer, når den kobles fra spolen. Relæet ændrer bevægelse, men det forbliver et sted indtil næste drejning.
Pulserne til spolerne kommer fra to mikrobølger, de tændes, når antennens relæ rammer kontakten.

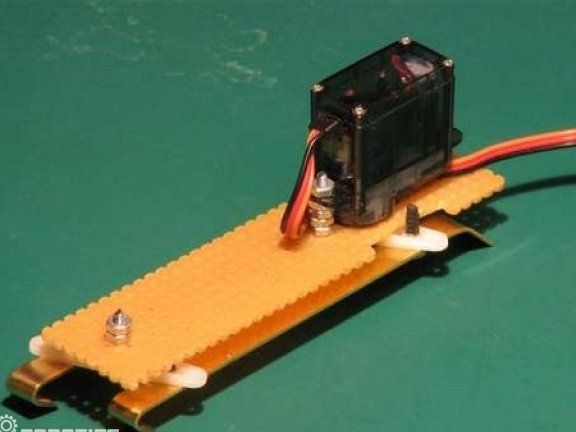
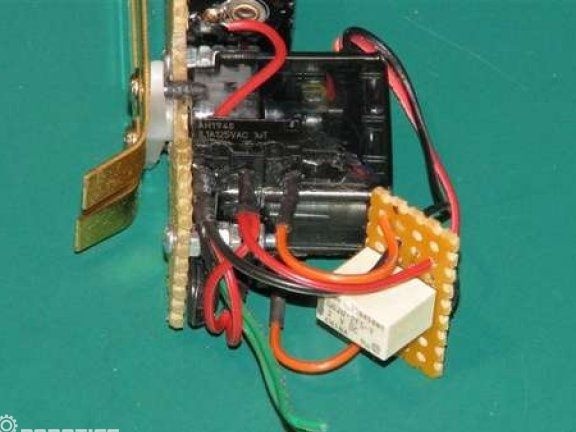
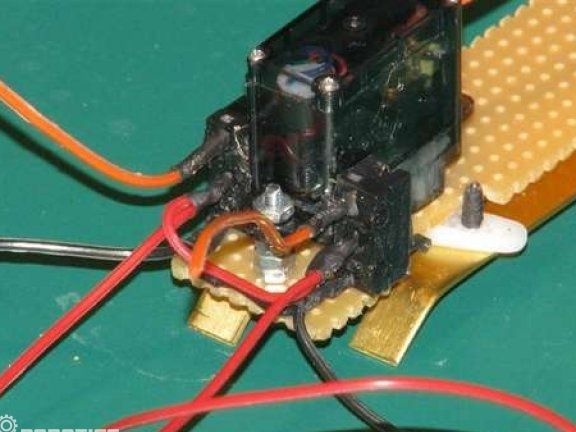
Trin fire Montering af den elektroniske del
Relæet er monteret på et skrot på en plade, så det er nemmest at tilslutte. Hele processen med tilslutning af elektronik vises på billedet.





Det er alt, nu er roboten klar. Bedst af alt, han ser ud til at være sig selv på gulvtæppet, da det er designet specielt til sådanne steder. Først skal roboten tænde lysdioderne, og derefter vil den langsomt kravle langs gulvet.