

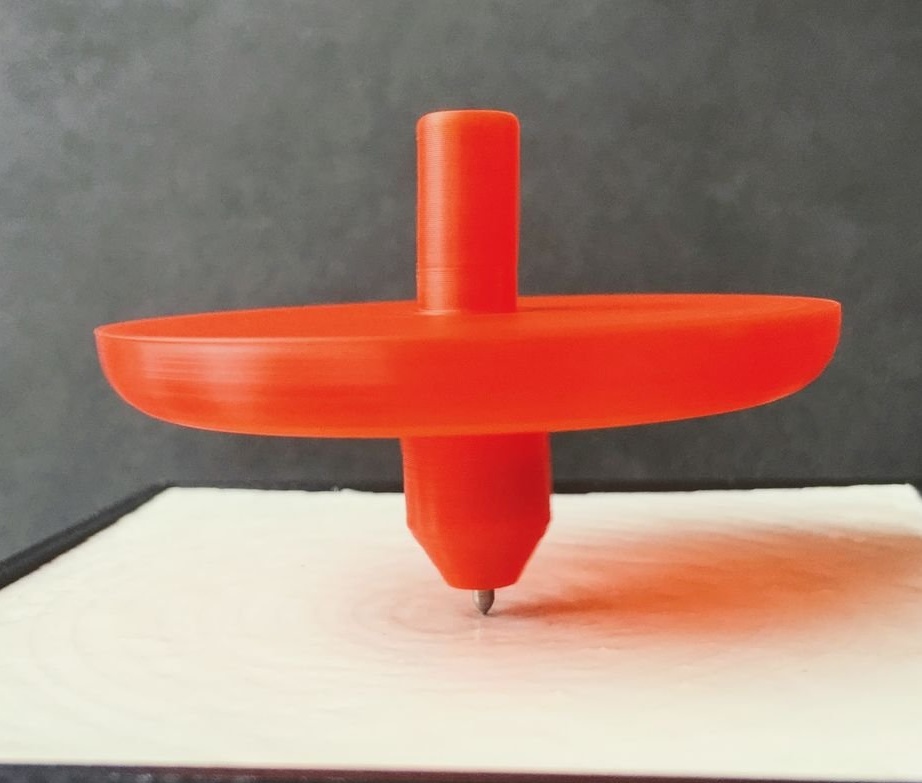
Når toppen roterer, forvandles dens kinetiske energi gradvist til varme, og snart stopper den. hjemmelavet produkt, der er foreslået af forfatteren af Instructables under kaldenavnet HowToEngineer, kompenserer for friktionstab på grund af energiforsyningen udefra. Den roterende top vil rotere kontinuerligt, indtil det generer brugeren selv, og han slukker for enheden.
Princippet for betjening af enheden er baseret på interaktion mellem magneter:
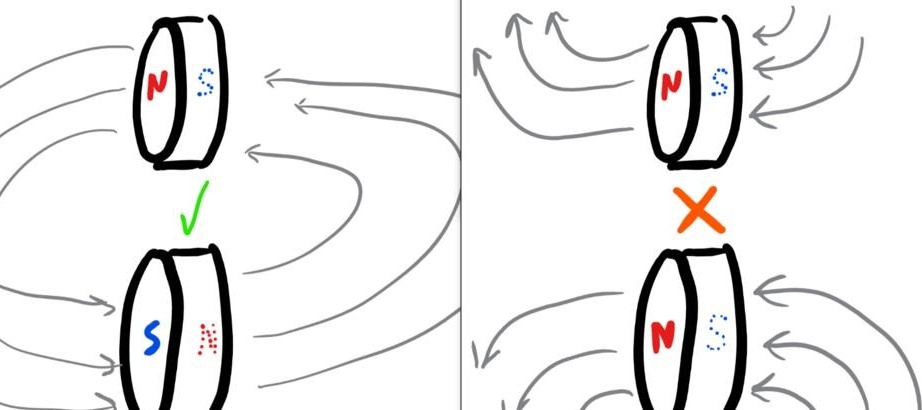
Udenfor - en magnet, der er vægget op i toppen, indeni - en magnet på en disk, der er drevet til rotation af en elektrisk motor. Læsere, der antydede, at der bruges flere elektromagneter i designet, skiftevis tændt af Arduinovil blive skuffet. Eller vice versa, de er glade, hvis de betragter dette som over-engineering. Regulatoren for den elektriske motores omdrejningshastighed er en trådmodstand.
Følgende er nogle detaljer om enheden: en switch, en tråd (krævet) variabel modstand (rangeringer fra 25 til 100 ohm er velegnet), en elektrisk motor, en tynd trådet tråd, lige under alt dette er to magneter, og omkring ... en bøjle. Bliv ikke overrasket, det er meget praktisk at fremstille toppen af toppen. Hvis du bider et meget lille stykke ståltråd af det, kan du endda bruge det videre til det tilsigtede formål.

Uden værktøjer kan du selvfølgelig ikke. Og hvis du har en 3D-printer og en tokomponent epoxyharpiks, er der arbejde for dem.

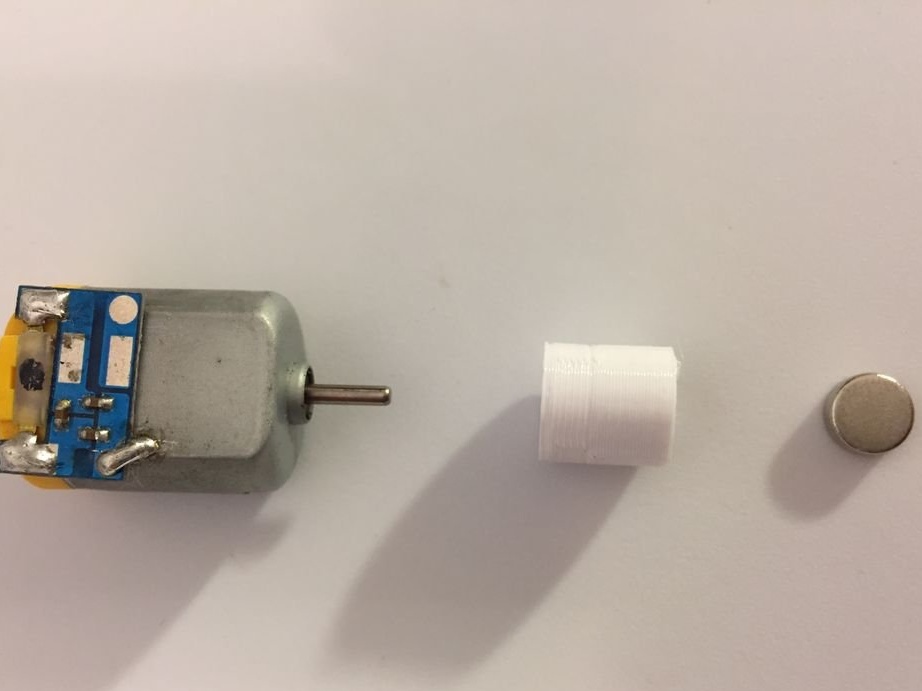
Efter at have udviklet alle 3D-trykte dele uploader guiden to arkiver, hvoraf den ene indeholder alle filer i FreeCAD-formatanden - alle STL-filer. Derefter opsamler den den elektriske del af enheden:

Fastgør en magnetholder til motorakslen, som magneten er monteret i, og limer den med epoxy. Mens den tørrer, skal der ikke være nogen genstande i nærheden, der kan tiltrække magneten og derved trække den ud af adapteren. Harpiks må ikke have adgang til motorlejet - det kan ikke rotere. Polariteten skal vælges, således at motoren, når den ses ovenfra, roterer med uret. Hvis du er venstrehåndet - mod uret.
Installerer alt i tilfældet, det næste foto viser, hvordan nøjagtigt magneten er placeret i adapteren. Det bliver også klart, hvad man skal gøre med et motorophæng og en adapter, hvis der ikke er nogen 3D-printer. Håndtaget til den variable modstand kan tages med ethvert passende, færdigt eller hjemmelavet.

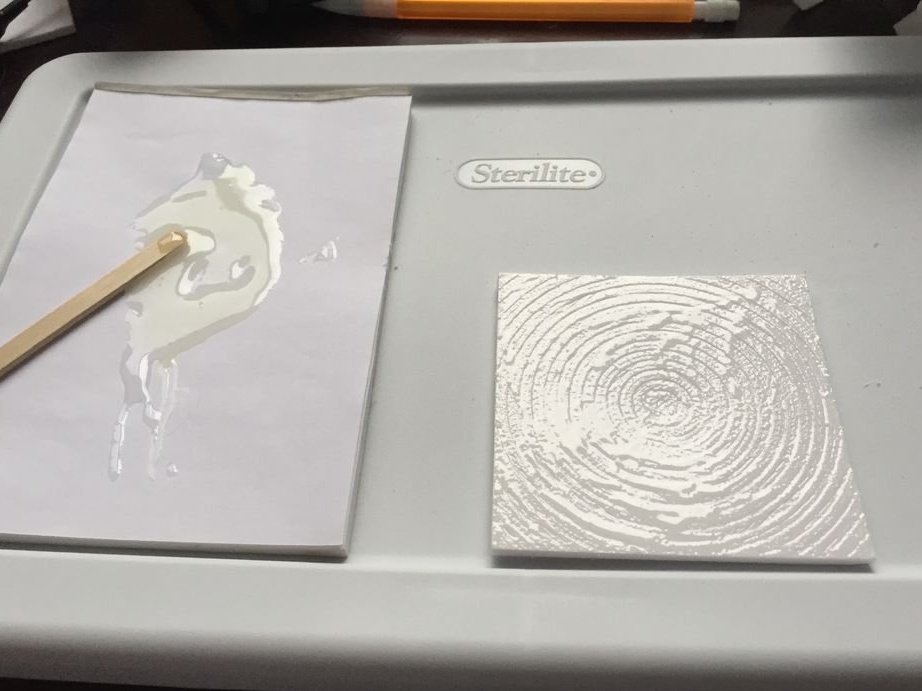
Den overflade, hvorpå den roterende top roterer umiddelbart efter 3D-udskrivning, er ikke egnet til dette. Skibsføreren polerer det, påfører et lag af epoxy, hærder det, polerer det igen og påfører et andet lag. Efter hærdning opnås en glat overflade.
Den færdige del lukker sagen, og enheden er klar:

I 3D-trykte toppe (de kan også fremstilles på en anden måde) installerer magneter, dækker dem med cylindre og tætninger:
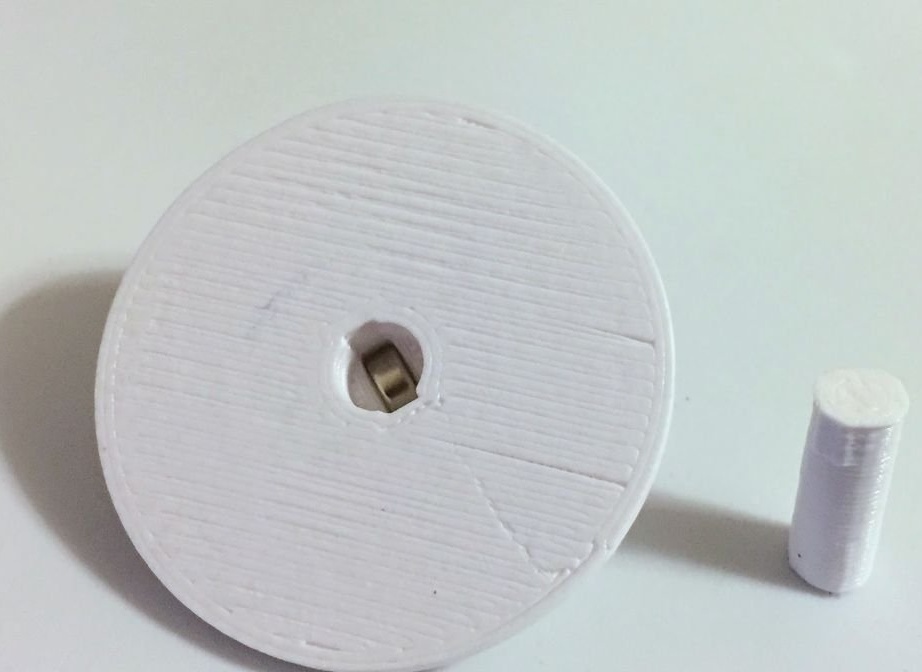
En af de to toppe har allerede en plastikspids. Du kan bruge det med det samme, men det bliver hurtigt kedeligt - du skal slibe det. For den anden top afskærer masteren et lille stykke ståltråd fra bøjlen:

Skarpes den, borer et hul i toppen, klistrer den resulterende spids der:
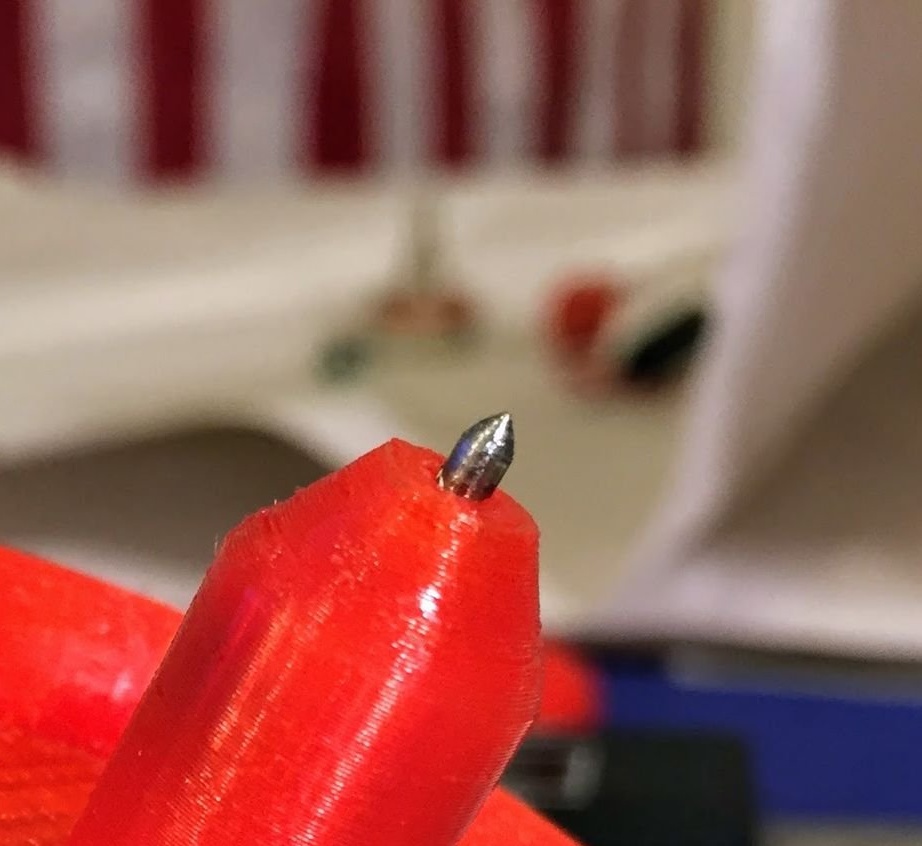
Begge spinde toppe er klar:

Hvis overfladen til rotation af toppen ikke er fremstillet ved 3D-udskrivning, men på anden måde, og det viser sig at være straks glat, skal den slibes og overtrækkes med epoxy som beskrevet ovenfor alligevel. Ellers vil det hurtigt slides af virkningen af en metalltip. Under alle omstændigheder er det nødvendigt at give mulighed for at lirke denne del og fjerne den for at få adgang til batterirummet.
Skibsføreren vrider den variable modstand til et minimum, sætter toppen på overfladen, løsner toppen, tænder for strømmen, drejer den variable modstand forsigtigt, indtil friktionen i lejerne er overvundet - motoren begynder at rotere. Det øger hastigheden lidt og sænkes derefter, indtil motorhastigheden falder sammen med toppen af toppen. Det er synkroniseret med motoren, det vil kunne ses ved en skarp lydændring. Nu kan du øge hastigheden til det ønskede. Den roterende top roterer, indtil enheden er slukket, eller indtil batterierne / akkumulatorerne er afladet, børsterne, motorlejerne er slidt, og den første top har også en spids. Alle fejl er lette at løse, og alt fungerer igen. Du kan også give et input til en 5 V PSU og en pulsstabilisator til at konvertere denne spænding til 3,3 V, og også bruge en PWM-controller i stedet for en variabel ledningsmodstand.