
I dag har vi et andet hjemmelavet produkt fra AlexGyver (YouTube-kanalen "AlexGyver").


Det er det roboten bartender. Og efter at have læst denne artikel til slutningen, vil du lære, hvordan du samler denne enhed derhjemme bogstaveligt talt på knæet gør det selv.
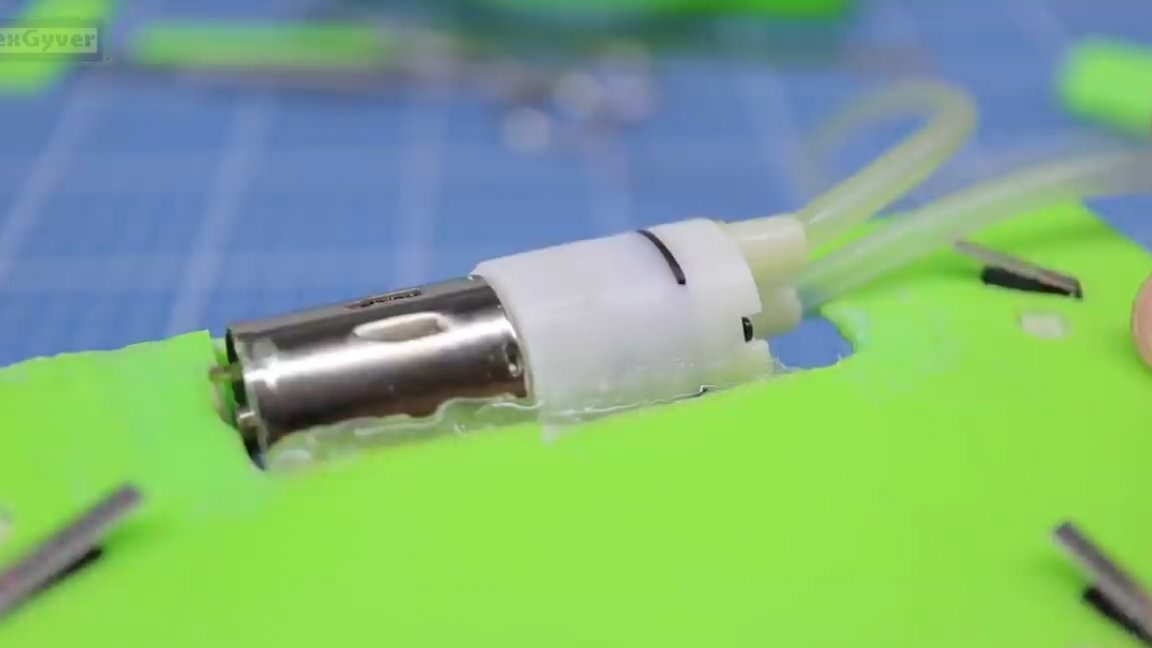
Så nalivatoren er en enhed, der hælder drikkevarer i glas. Denne enhed skal nødvendigvis indeholde en pumpe, det vil sige med en særlig mad, fortrinsvis. Jeg gennemgik ganske mange forskellige pumper med Aliexpress, forfatteren slog sig ned på en sådan membran:

Plus alt, der er skrevet på det: mad. Indvendigt er alle plastiske, enheden fungerer på grund af forvrængning af hovedet og ventilerne. Hvis nogen vil tænke i retning af peristaltiske pumper - jeg skynder mig at forstyrre dig, de er meget støjende, langsomme, og de har en jet so-so.
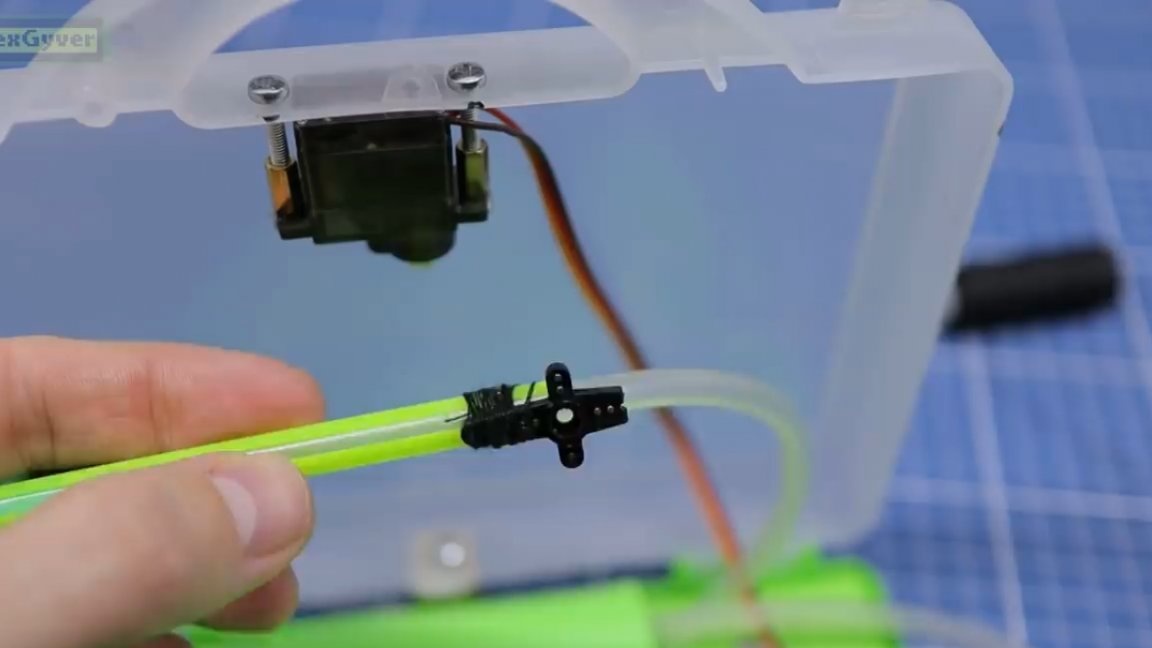
Dernæst drejemekanismen.
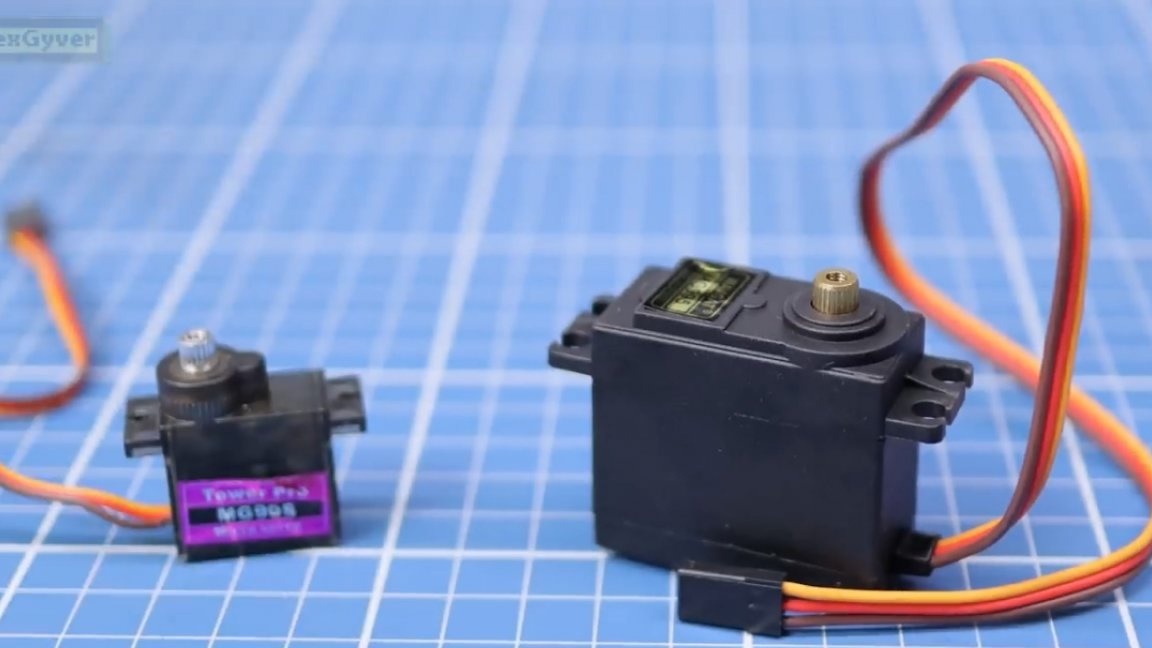
Dette er alt klart her. For at indikere tilstanden af kopperne vi bruger.
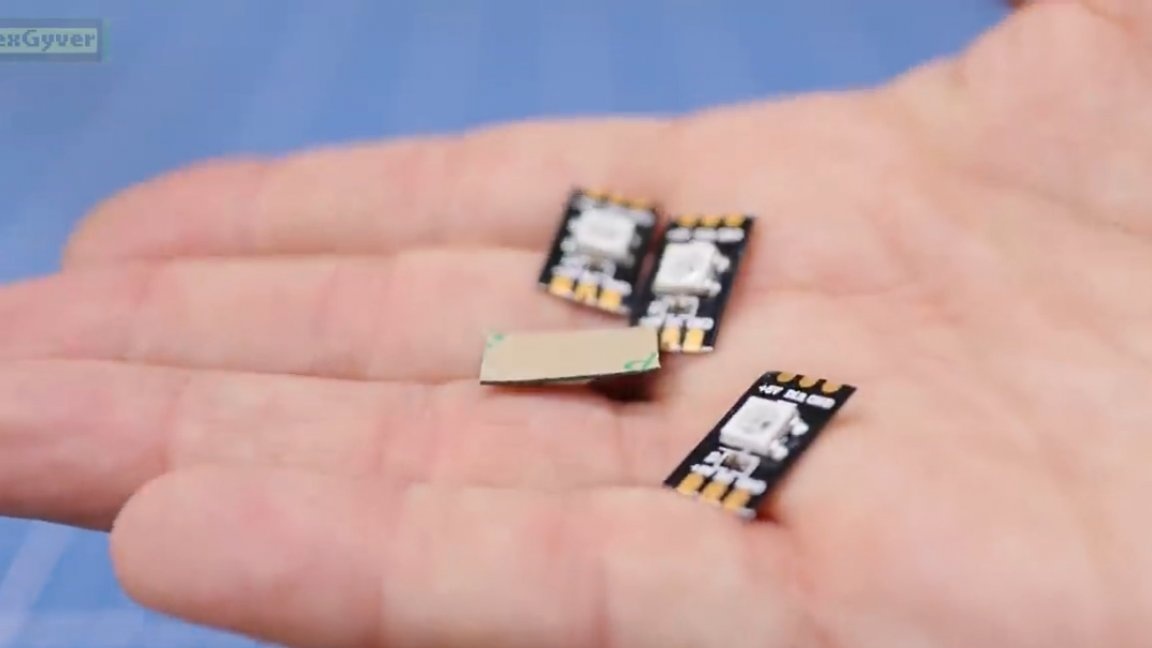
Det vil stadig være lettere med dem end med almindelige tri-farve RGB-LED'er, især da de praktisk kan implementeres i denne version:

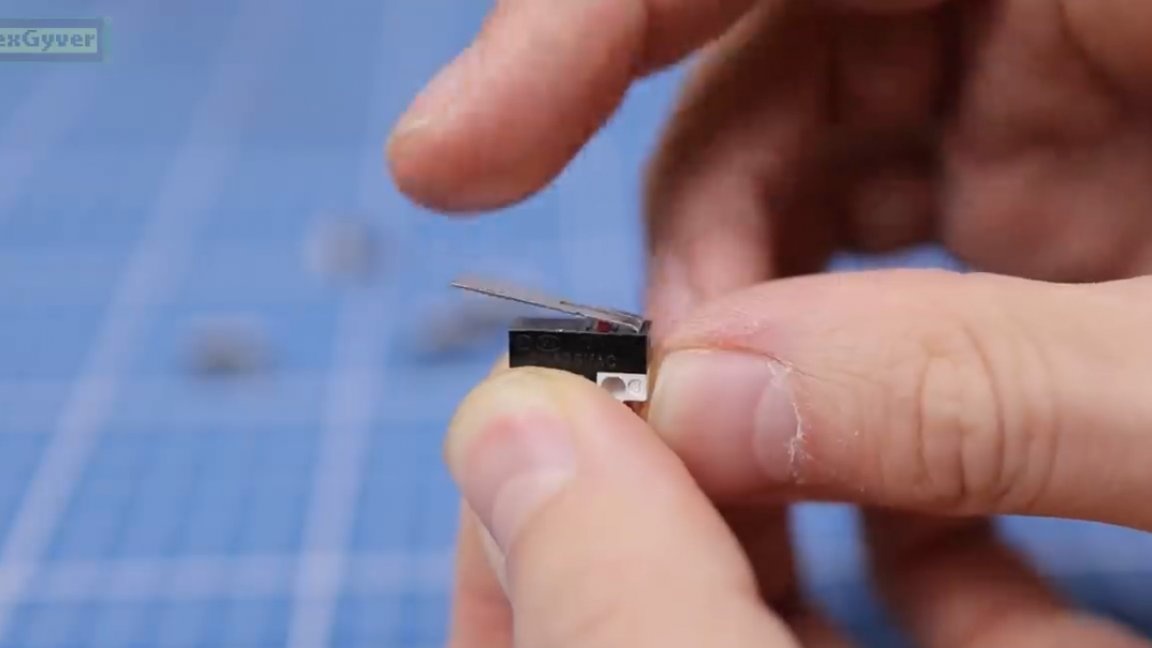
For at kontrollere (spore) tilstedeværelsen af kopper besluttede forfatteren at tage, de er også slutknapper.
For at kontrollere systemet har vi også brug for og

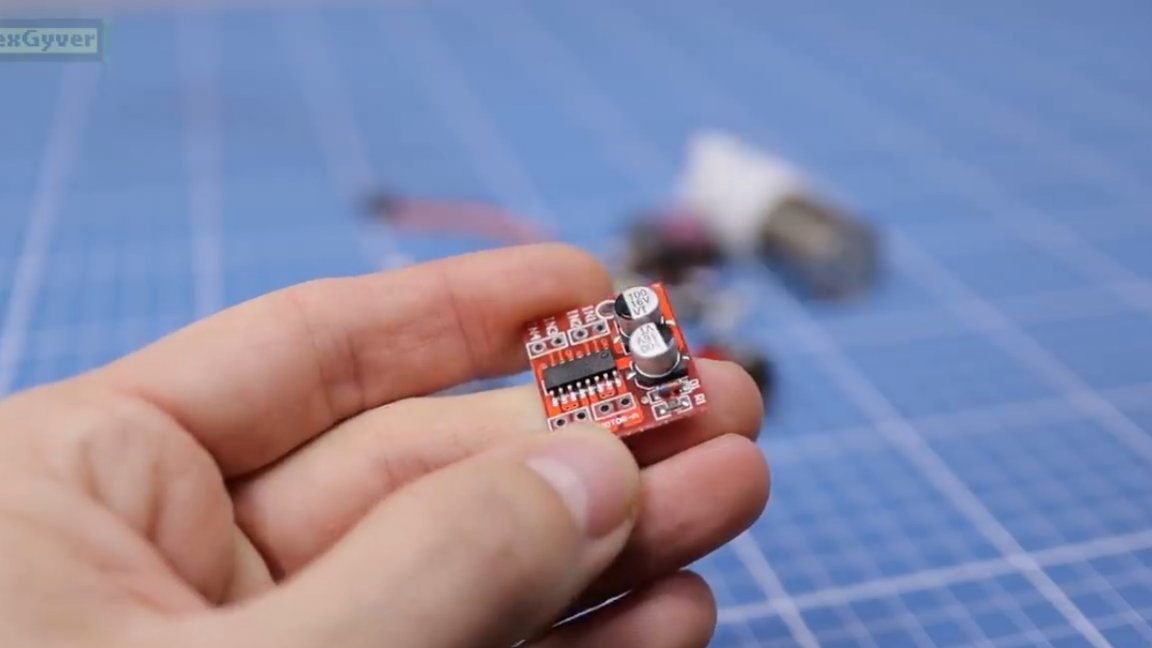
For at styre pumpen og strømmen til drevet bruger vi dette
Og at styre al denne forretning vil være det, vi programmerer på en speciel måde.
Forresten, enheden vil blive drevet fra, og til dette har du brug for dette
Det er faktisk alt elektronik. Nedenfor er alle nødvendige elektroniske komponenter i rækkefølge:
1)
2)
3)
4)
5)
6)
7)
8)
9) .
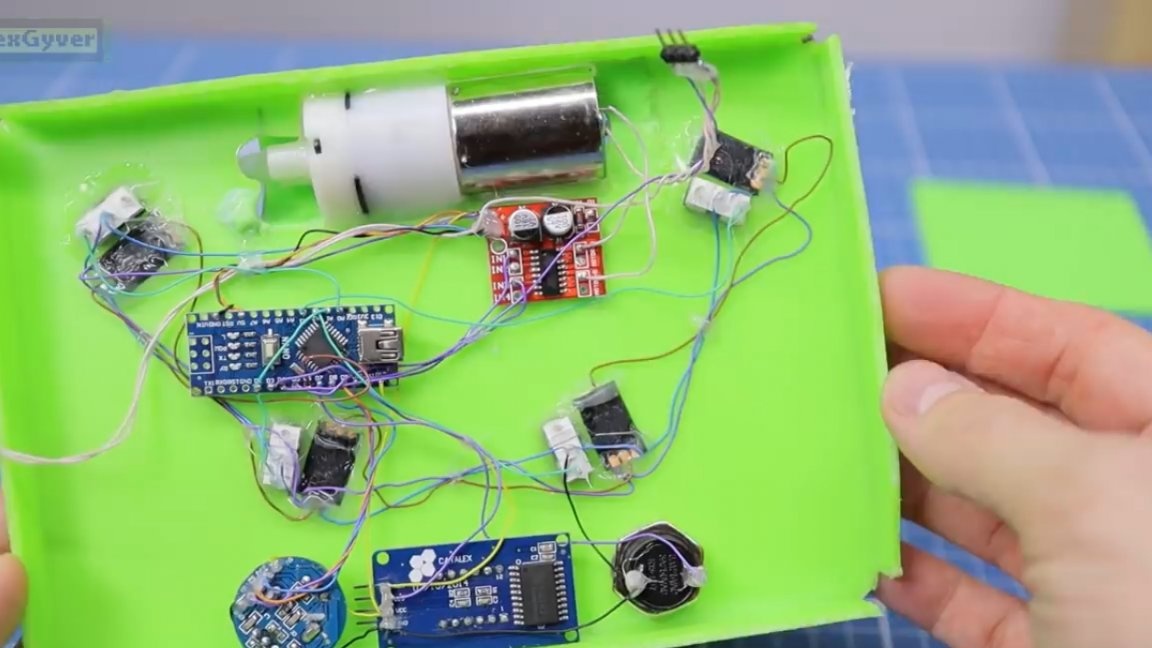
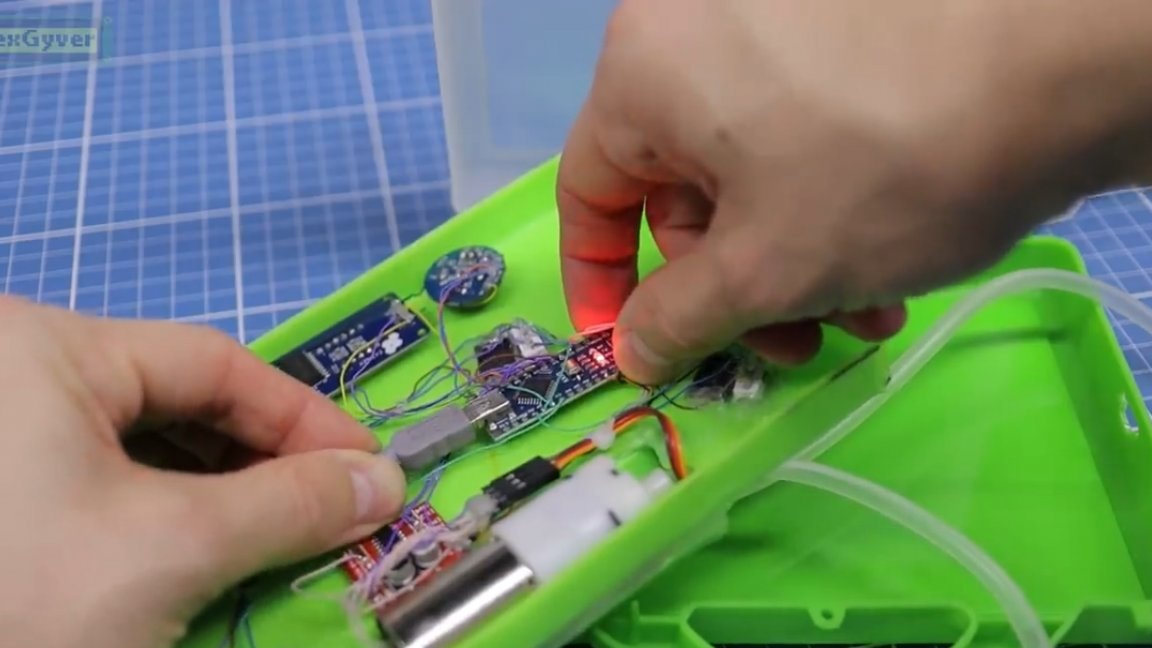
Elektronik forbinder i henhold til følgende skema:
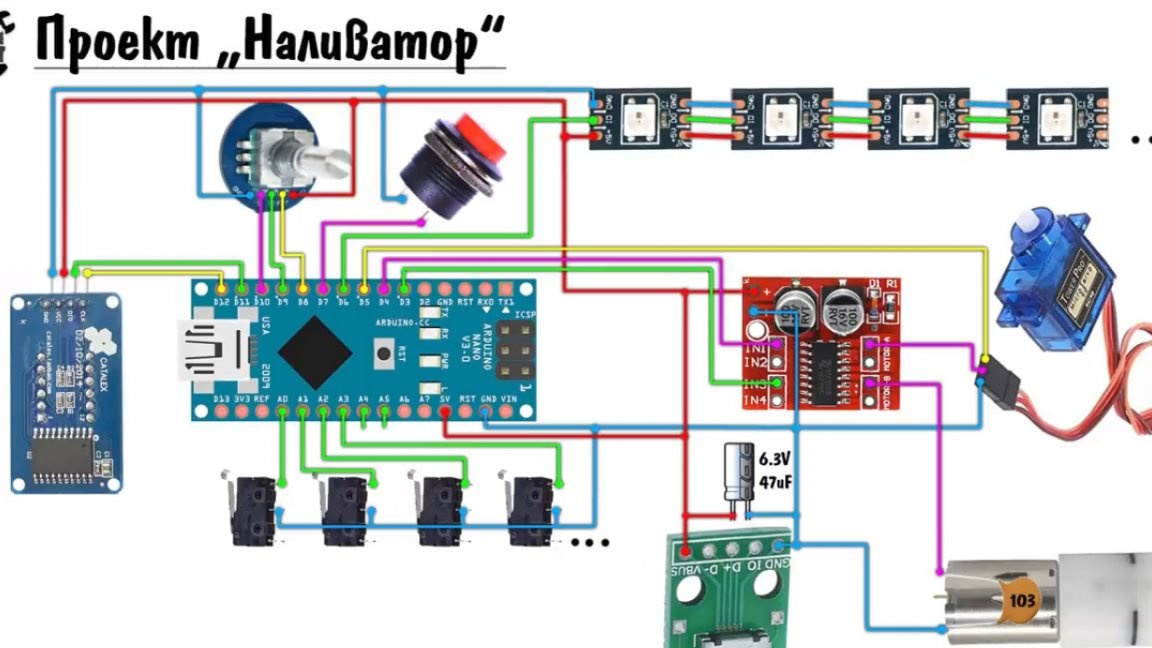
Som du kan se, er der ikke noget særlig kompliceret her. Servokraft isoleres gennem driveren. Dette er nødvendigt, så du kan frakoble servoen fra strømmen og derved reducere strømforbruget og de lyde, den udsender. Denne maskine understøtter også arbejde med antallet af briller fra 1 til 6 stykker, så du skal lodde for så mange lysdioder og knapper, som du har brug for briller, og alt andet er konfigureret direkte i selve programmet.
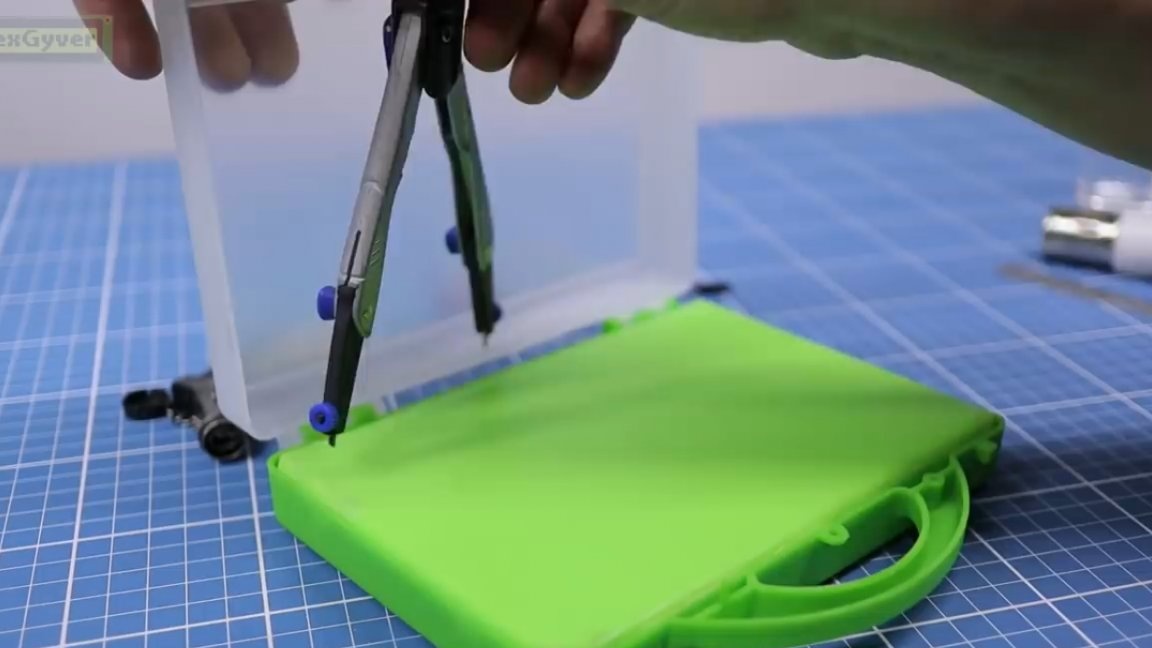
En sådan sag med en skruetrækker fra Fix Price vil perfekt spille sagens rolle:

Skruetrækkere selv om intet, du kan smide dem væk. Vi har også brug for plast, for eksempel en sådan skærebræt.

Det blev købt i en lokal hardwarebutik. Tykkelsen på plasten her er ca. 2 mm.
Dernæst er røret. Forfatteren fandt en passende igen i rettelsen.Du har også brug for et silikone-rør til akvarister:

Næste kopper, for eksempel, kan lide denne:

Vi starter med at tage målinger og lave dele af et stykke plast, der vil blive indsat i etuiet og giver os mulighed for at placere al elektronikken under en så hemmelig bund.

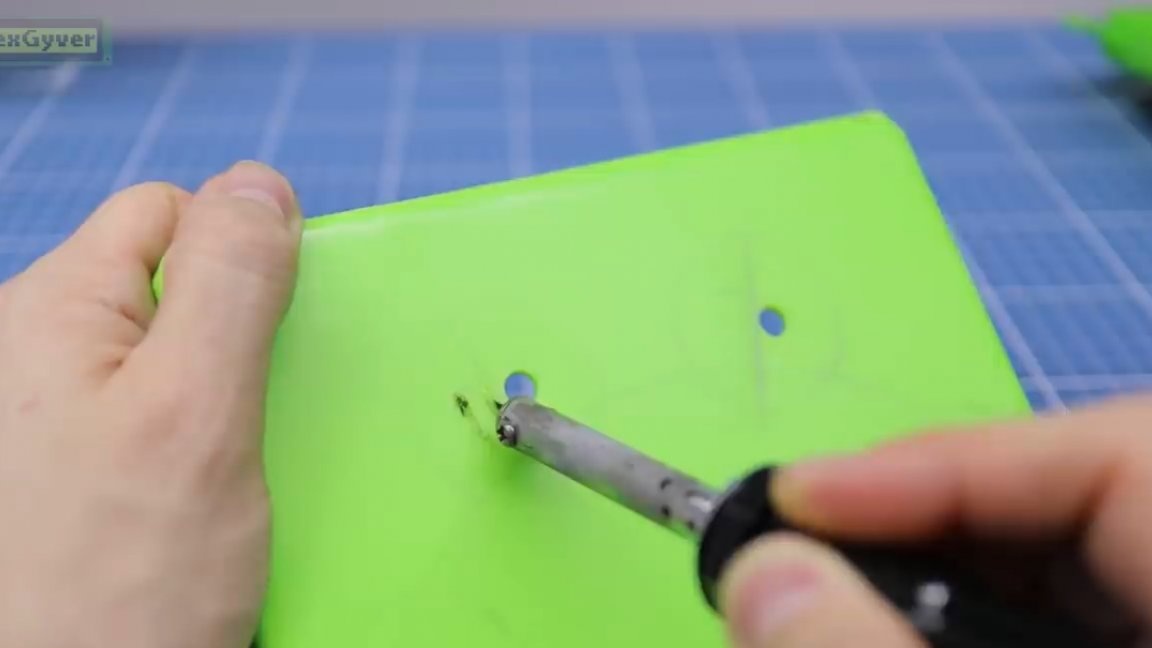
Derefter estimerer vi rørets bane og prøver på kopperne. Forfatteren lavede en sådan skabelon, hvorpå han markerede vinduet til knappen og hullet til lysdioden.

Ved hjælp af et fixspray-loddejern med en syet spids kan du skære plast som smør.

Nu installerer vi knapperne og fastgøres ved hjælp af en varm limpistol.
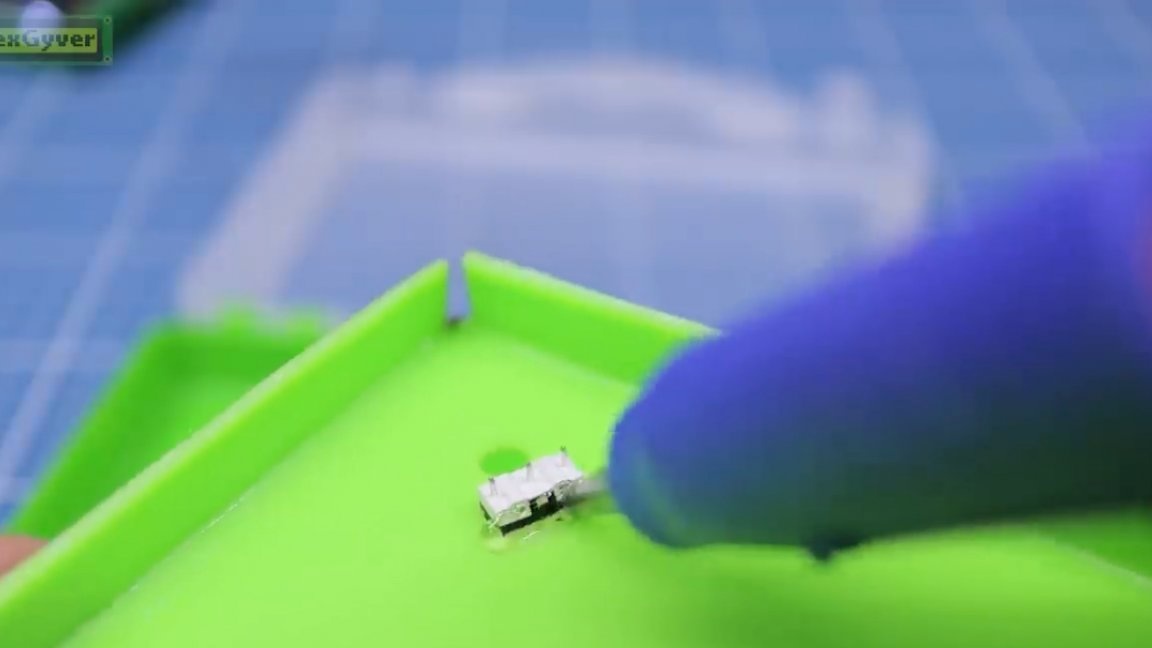
Fortsæt derefter med lodning. Du bliver nødt til at lodde meget. Vi starter med LED og knapper. Lysdioder skal forresten være fyldt med varm lim og også ovenpå for at få en slags diffusor.

Igen skabelonen, bor, brænd og sæt alt på sin plads.

Derefter skal du fikse røret på pumpen. For at gøre dette kan du opvarme røret i varmt vand eller bruge en lighter. Derefter limes pumpen ind i et vindue, der er specielt skåret til det, og ovenfra er det dækket med et halvcirkelformet skjold lavet af samme plast.

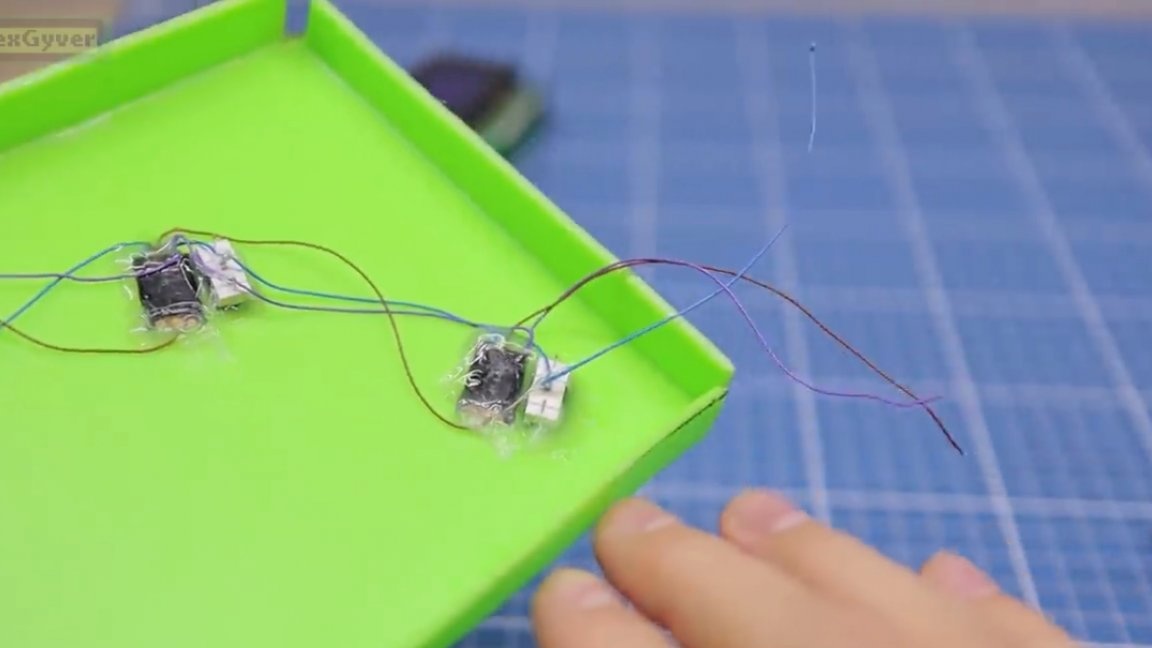
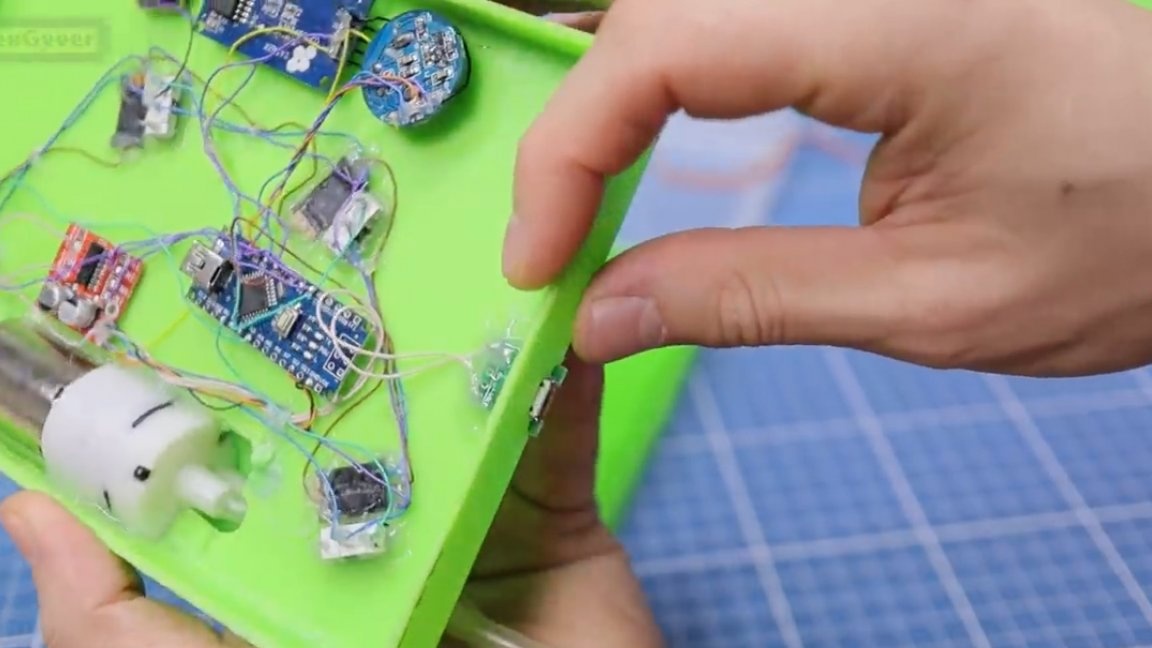
Dernæst lodder vi blot alt efter ordningen.
Servoen vil være placeret øverst på kuffertens låg. Forfatteren brugte stativer til trykte kredsløb til dette, og du kan fikse det med lange M3-skruer.
Derefter trækker vi USB-stikket ud gennem hullet i plastikken.
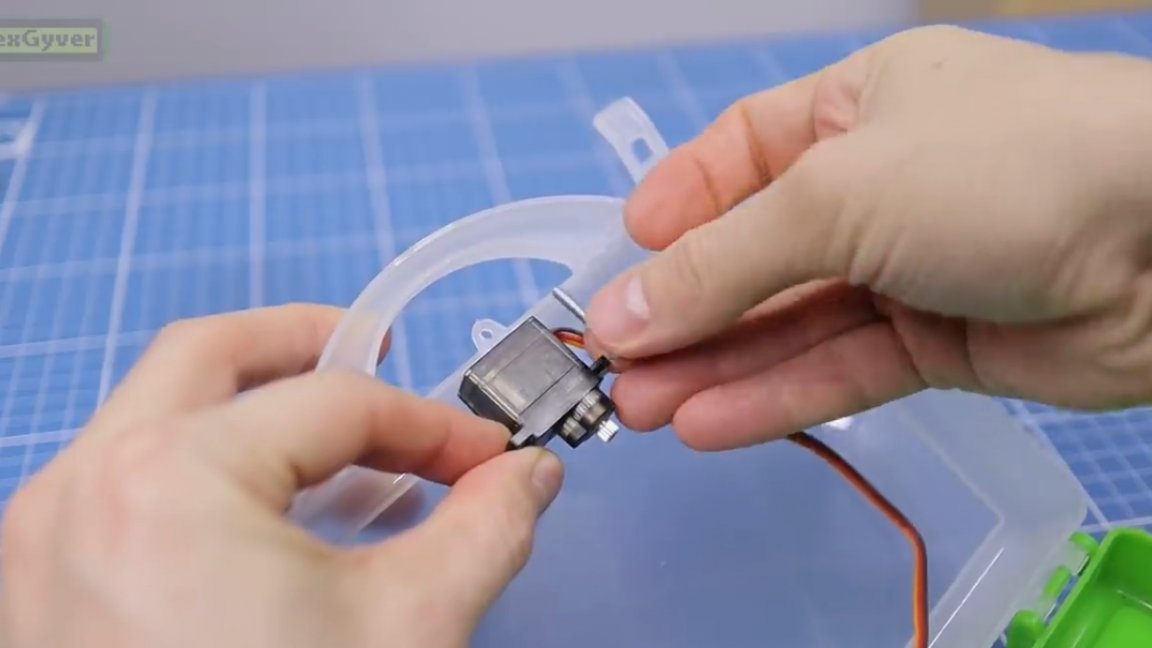
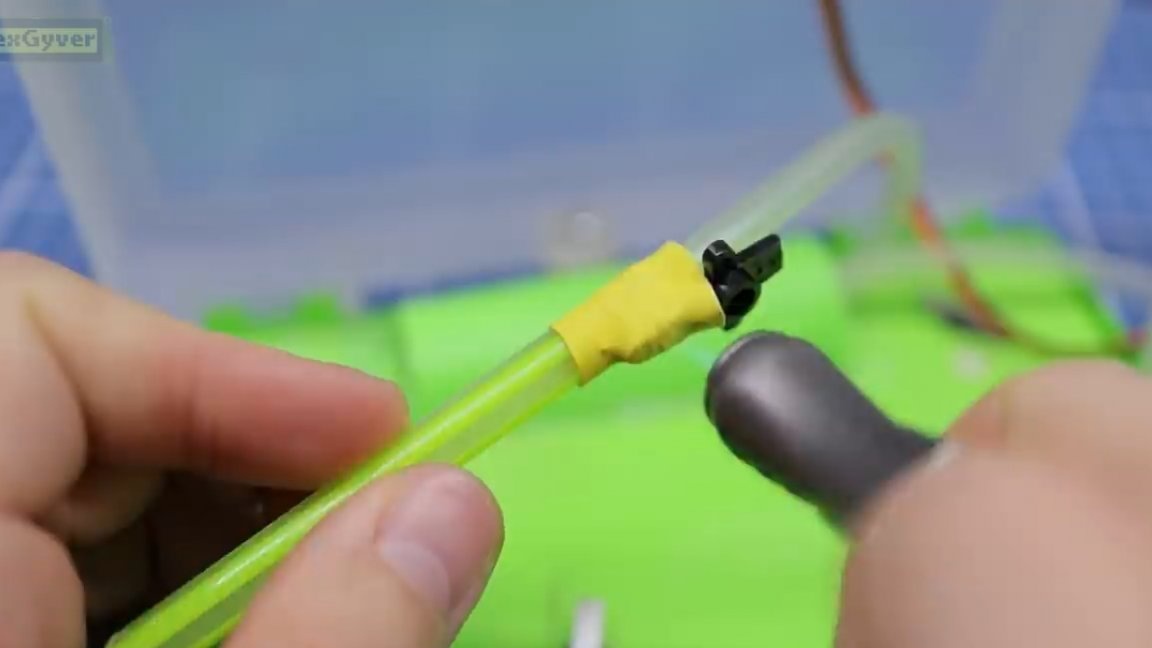
Lav nu en vandhane:

Vi fastgør vores rør til vippet på servo-drevet på de bedst måder, der er kendt for menneskeheden: tråde og superlim.
For ikke at ligne en ”kollektiv gård” bruger vi varmekrympning.
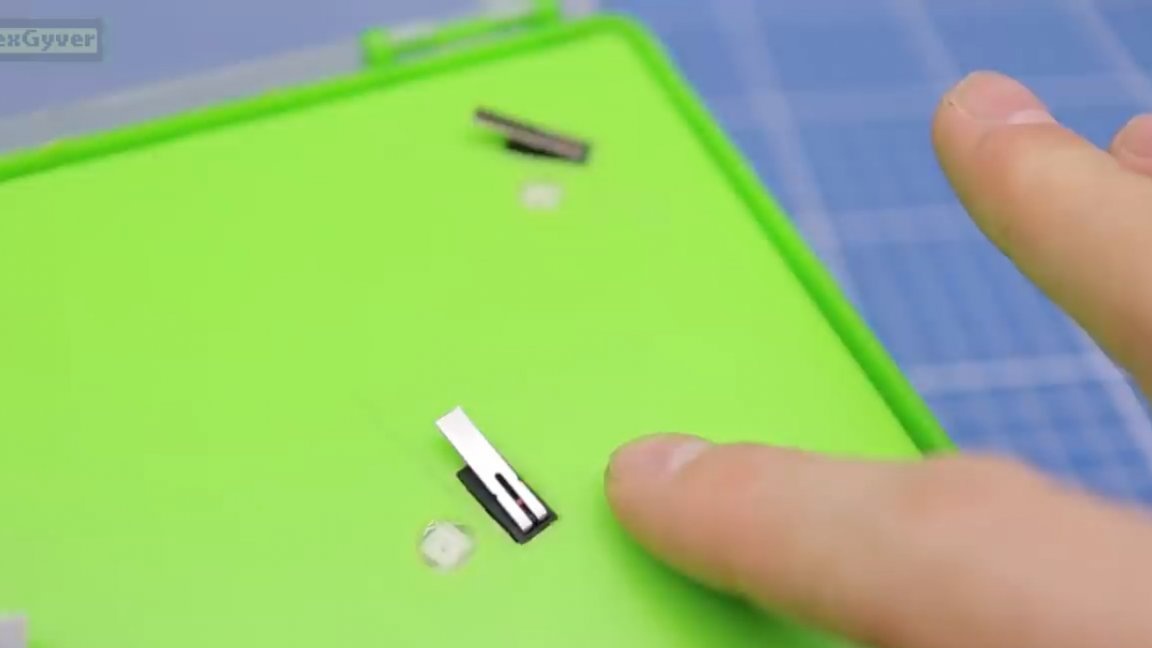
Nå, en helt anden sag! Det gjenstår at foretage fastgørelse af dækslet ved hjælp af et hjørne og en magnet limet på superlim. Det fungerer fejlfrit, ser teknisk ud og generelt ret praktisk.

Vi regnede ud med jernet, det gjenstår at indlæse firmwaren i Arduino.
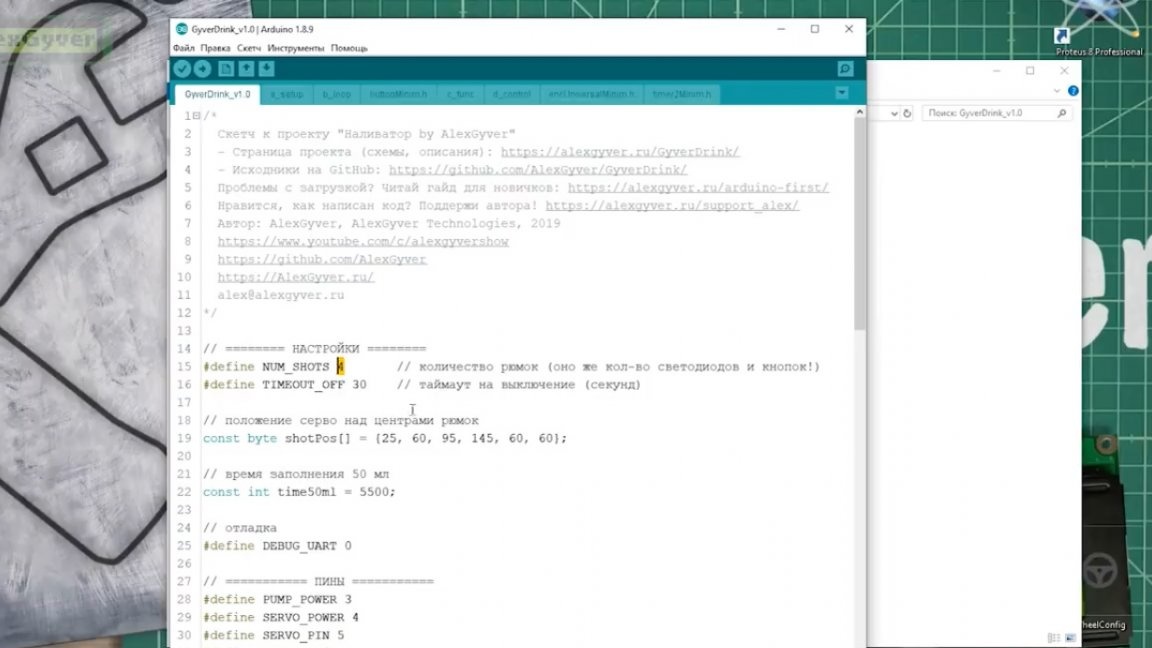
Download arkivet. Arkivet med den nødvendige software er også tilgængeligt på projekt side.
Der finder du også detaljerede instruktioner til download af firmware. Faktisk er alt simpelt der. Du skal installere programmet, tilslutte Arduino nano-kortet til computeren, åbne firmwarefilen, angive dit antal briller (fra 1 til 6) og klikke på download-knappen.
Fortsæt derefter til kalibrering. For at gøre dette skal du holde den store knap nede og tænde for systemet. Linjen “service” kører gennem displayet, hvilket betyder, at systemet er i servicetilstand.

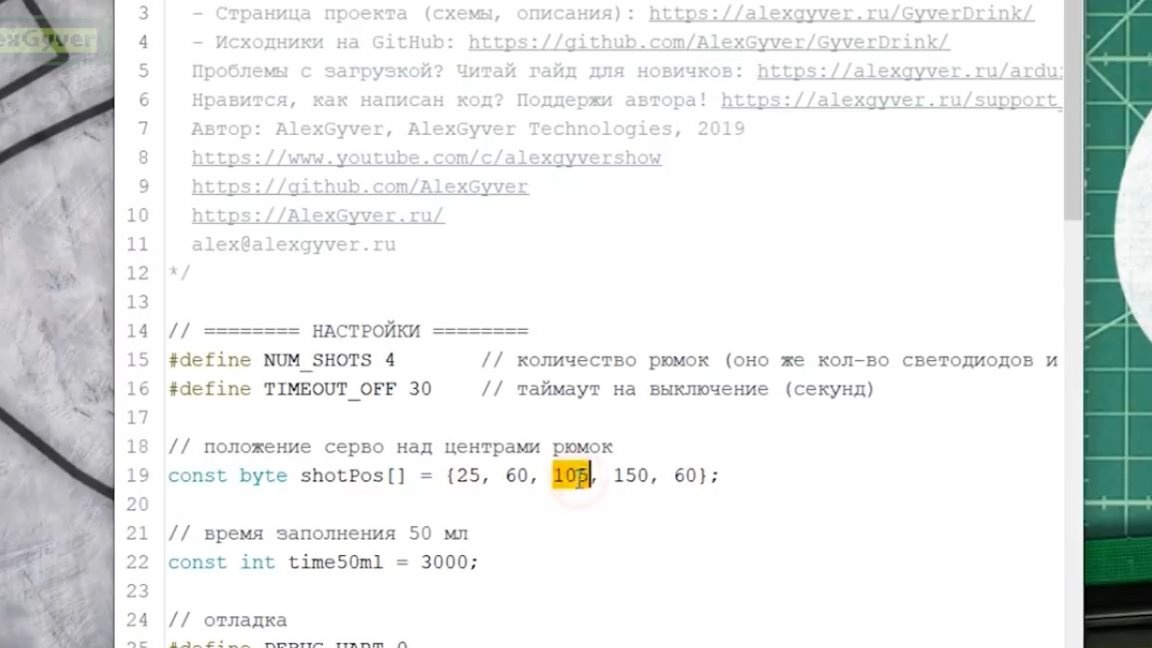
Servicetilstanden giver dig mulighed for manuelt at rotere hanen, mens rotationsvinklen vises.
Nu skal du køre vandhanen gennem alle brillerne og huske vinklen for hver.

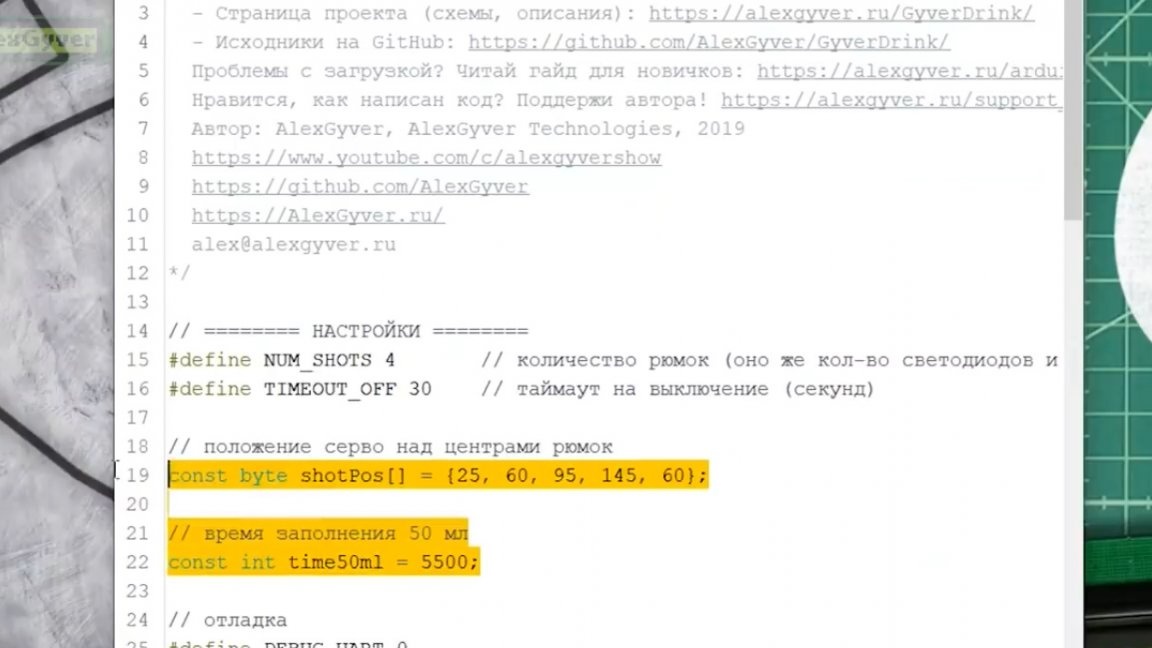
De opnåede værdier for vinklerne skal indtastes i firmwaren lige her, for fra nul:
Derefter skal vi hælde nøjagtigt 50 ml væske og finde ud af, hvornår denne procedure finder sted.
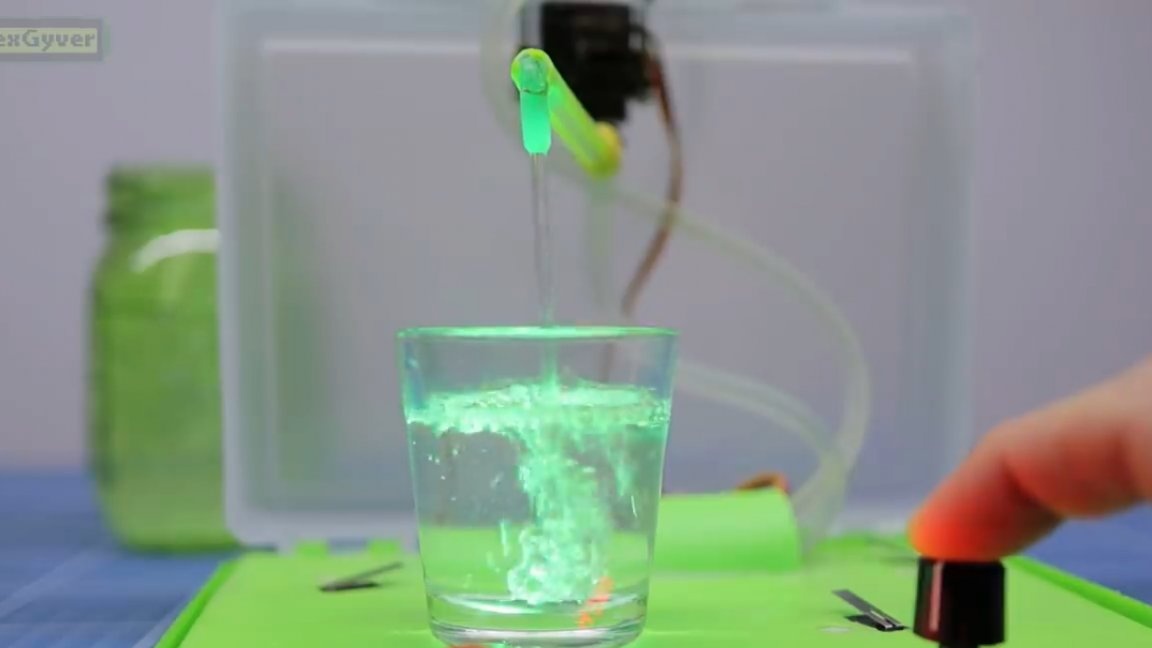
5,5 sekunder. Det resulterende antal indtastes her, disse er millisekunder:
Kalibrering afsluttet. Download kalibreret firmware til systemet.
Så hvordan man bruger det. Vi åbner, bringer vand, og mens vi holder nede koderknappen, kører vi vandet gennem røret.
I øjeblikket er vores system i manuel tilstand, bogstavet R. Det vil sige, vi sætter kopperne, justerer lydstyrken og trykker på knappen. Dernæst gør fyldstoffet sit job.

Efter fyldning af glasset søger apparatet efter tomme briller og fylder dem også, selvom de blev leveret inden slutningen af hældecyklussen.
Der er også en anden tilstand - automatisk, for at skifte skal du holde den store knap nede. I denne tilstand hælder systemet straks væske i hvert leveret glas.

Det er alt. Tak for din opmærksomhed. Vi ses snart!
Forfatterens video: