


I denne artikel vil guiden fortælle os, hvordan han lavede en robotbartender kontrolleret af en smartphone.
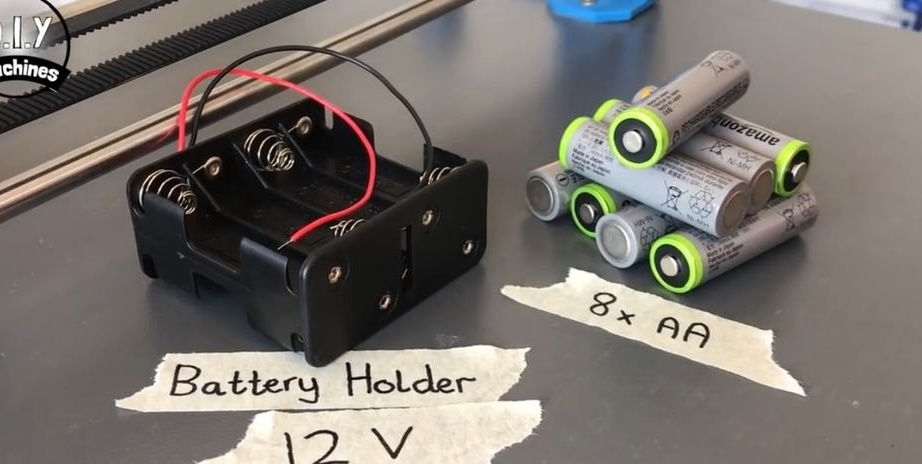
Enhedens funktioner: arbejde på Arduino, overkommelig pris, Bluetooth-kontrol fra enhver gadget, autonomi (arbejde fra 8 AA-batterier).
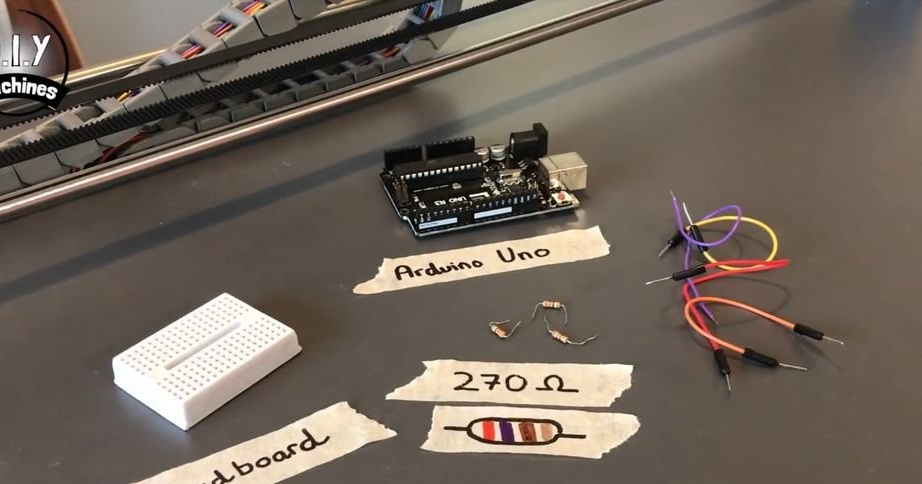
For at opbygge en sådan enhed brugte masteren følgende
Materialer og værktøjer:
-Arduino uno;
-Drivermotor L293D;
- kontakt switch;
-Linear lejer;
-Stap motor;
-Bælte og remskive (version 2m);
-Bælte og remskive (version 5m);
-HM10 Bluetooth-modul;
-En skruetrækker;
-Krepezh;
-Nozhki;
-Tabel top;
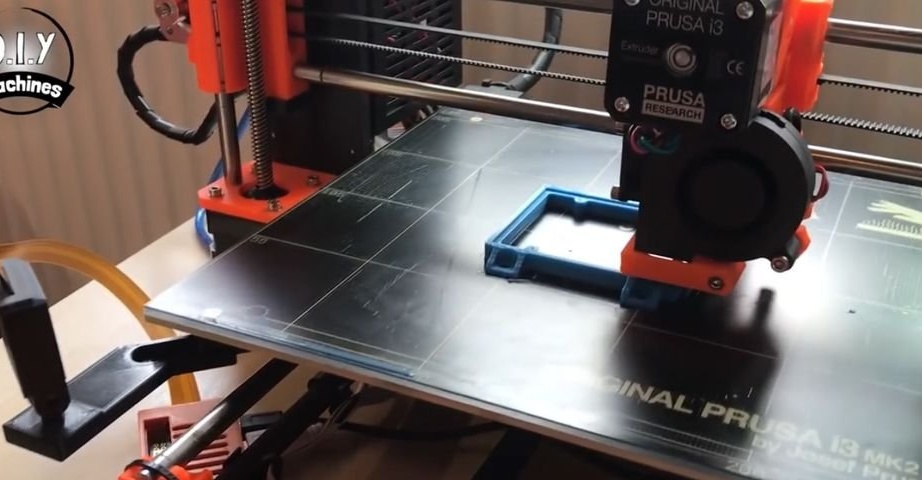
-3D printer;
-Metal stænger;
- skruetrækker;
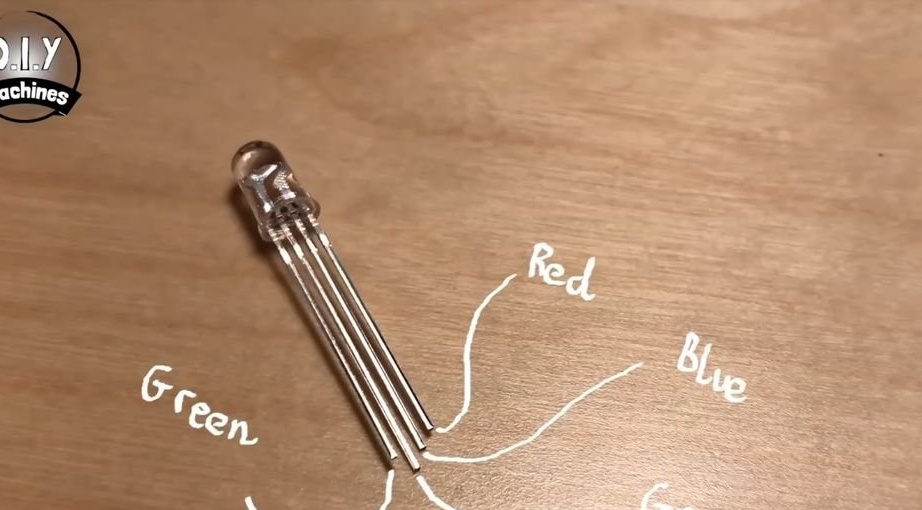
- RGB LED;
seeing-;
-Lodning tilbehør;
-Izolenta;
-Limpistol;
-Batterirum;
-Konnektory;
Button-type batteri;
-Computer med software;
- Holdere til flasker;
-Den ventil;
-Flaske;
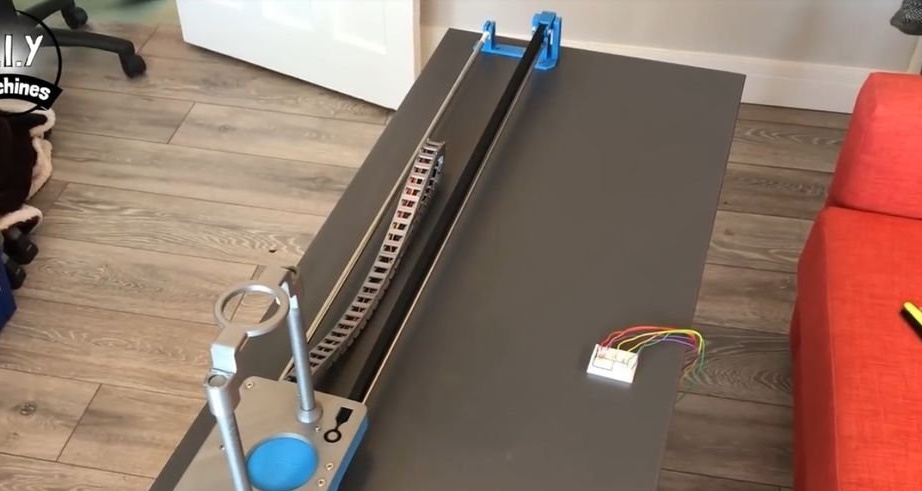
Trin 1: Tabellen
Først samler masteren bordet. Bordstørrelse 120 * 45 cm. Bordplade tykkelse 18 mm.


Trin to: Strammer
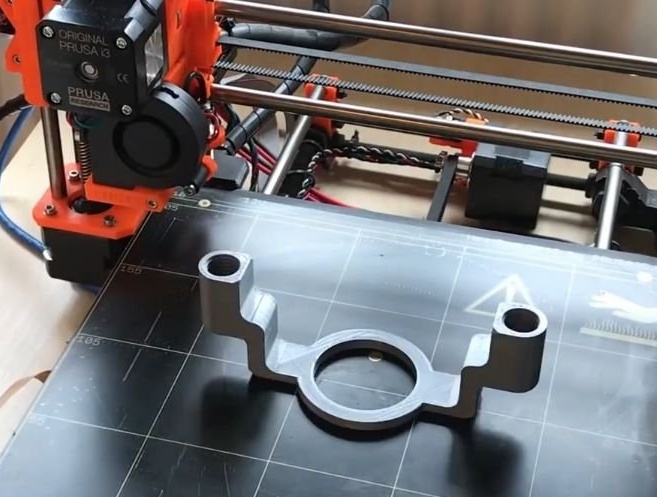
Filer til udskrivning af dele kan downloades nedenfor.
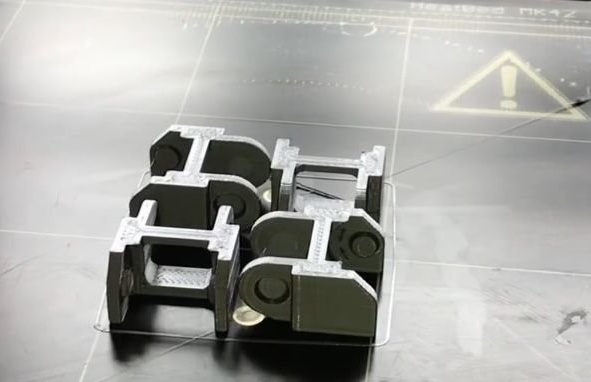
3D-udskrivning af filer.
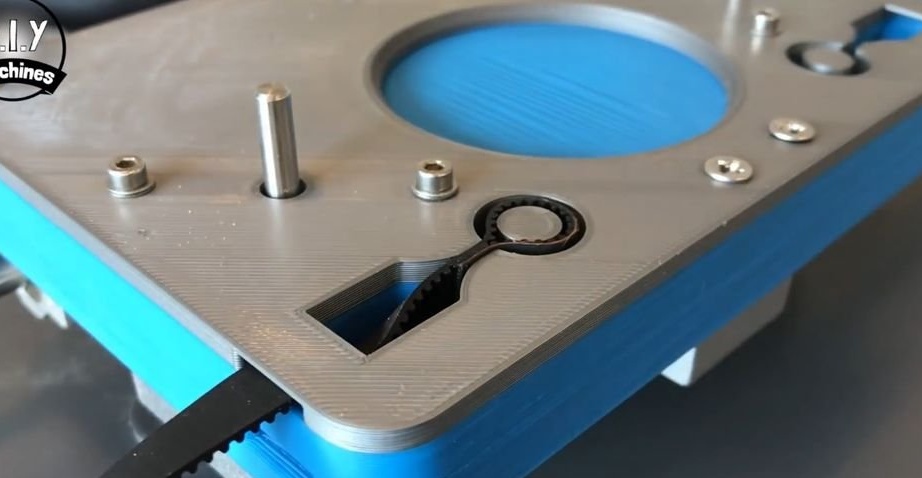
Nu vil det være nødvendigt at udskrive de to første detaljer “idler.stl” og “Rod_Clamp_V5.stl”.
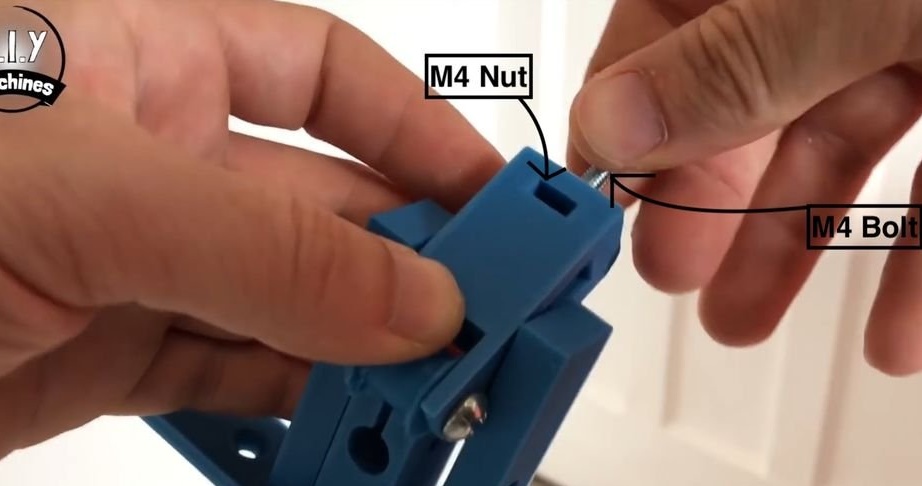
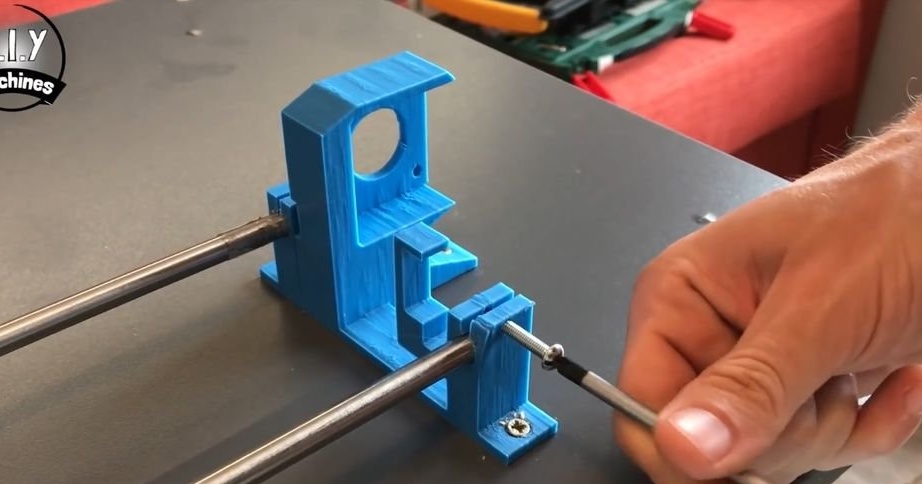
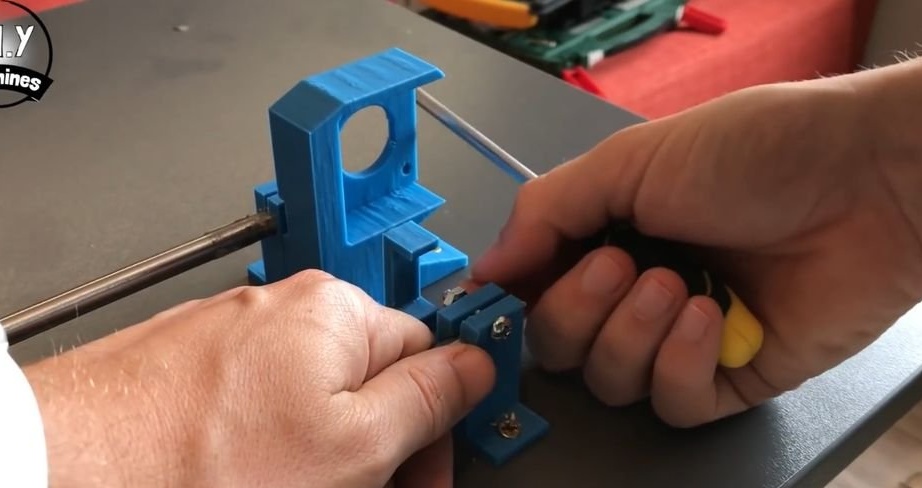
Efter udskrivning er det nødvendigt at fastgøre spændervalsen til stammenklemmen ved hjælp af en lang M4-bolt og møtrik. Stærk spænding er ikke nødvendig, da rullen skal rotere frit.
Derefter monteres de to dele sammen.
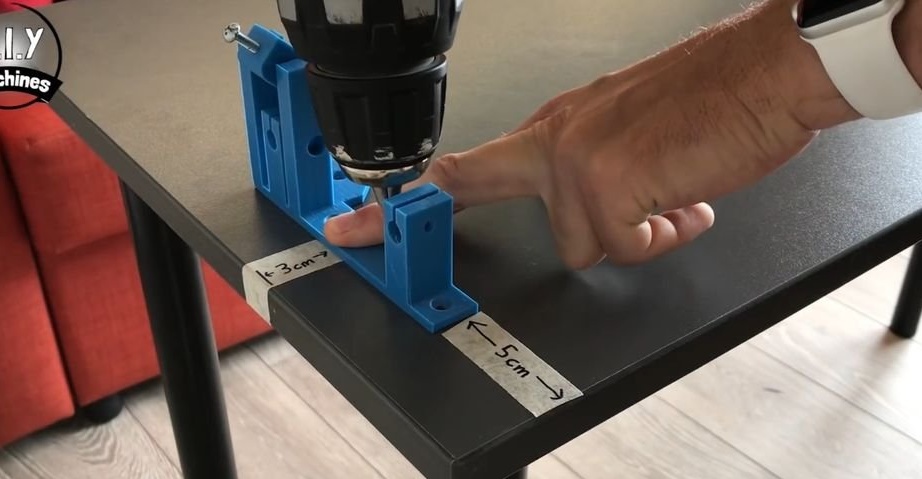
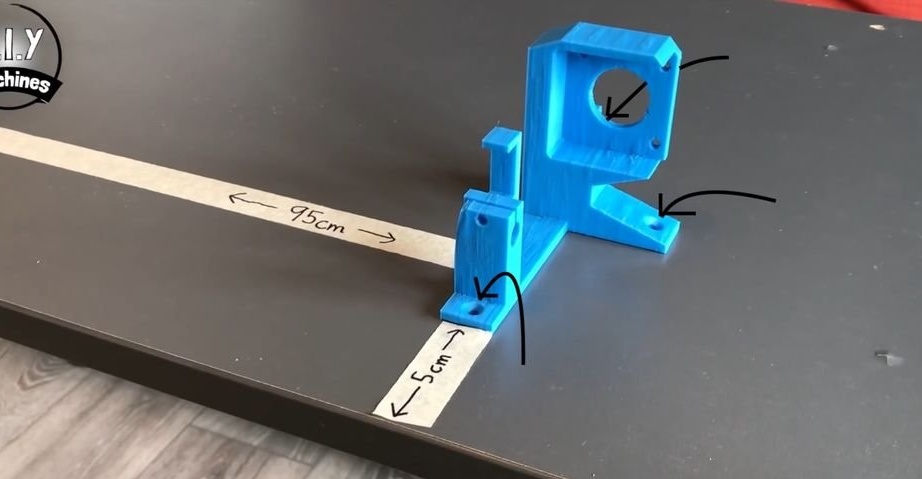
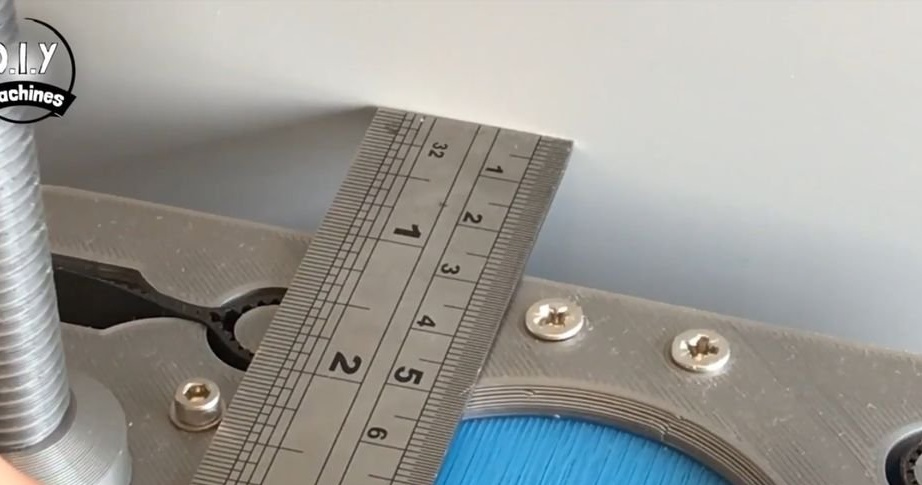
Markerer på et bord 3 cm fra venstre korte ende og 5 cm fra forkanten og stram strammeren.

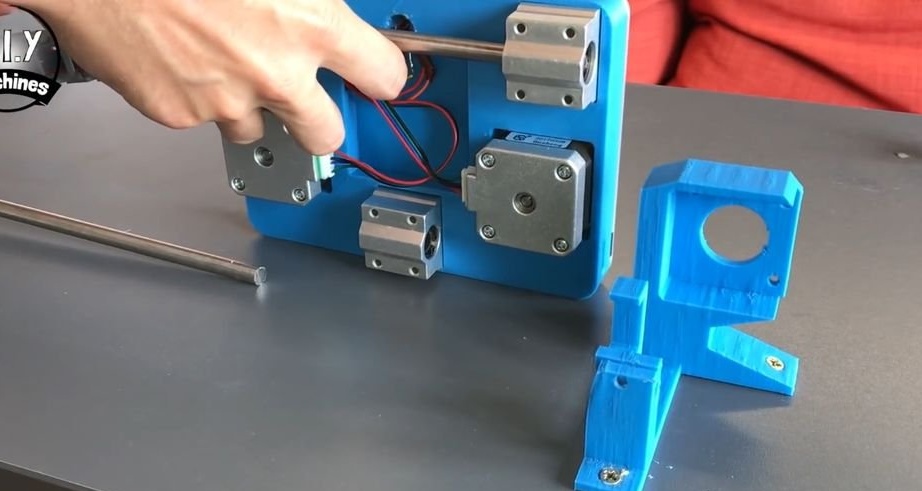
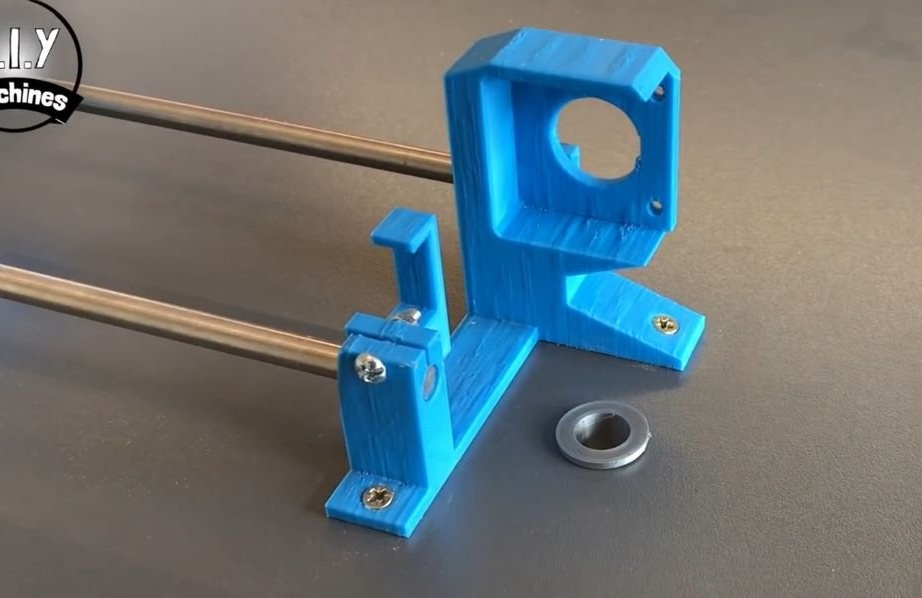
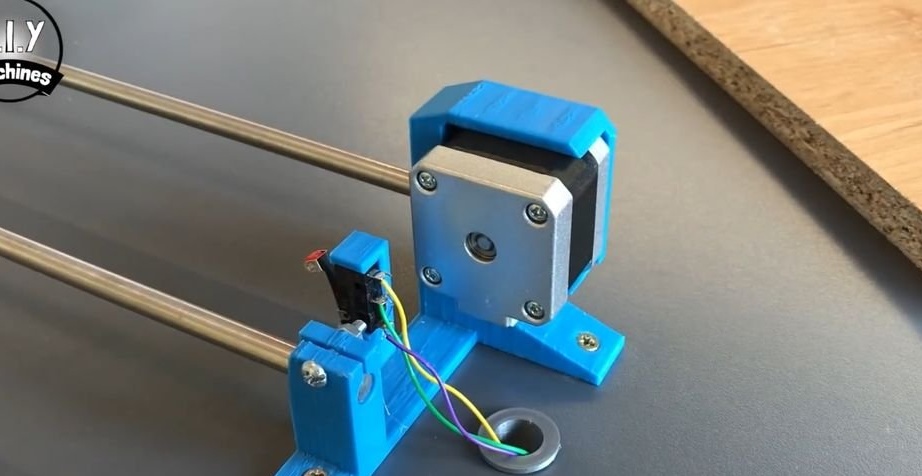
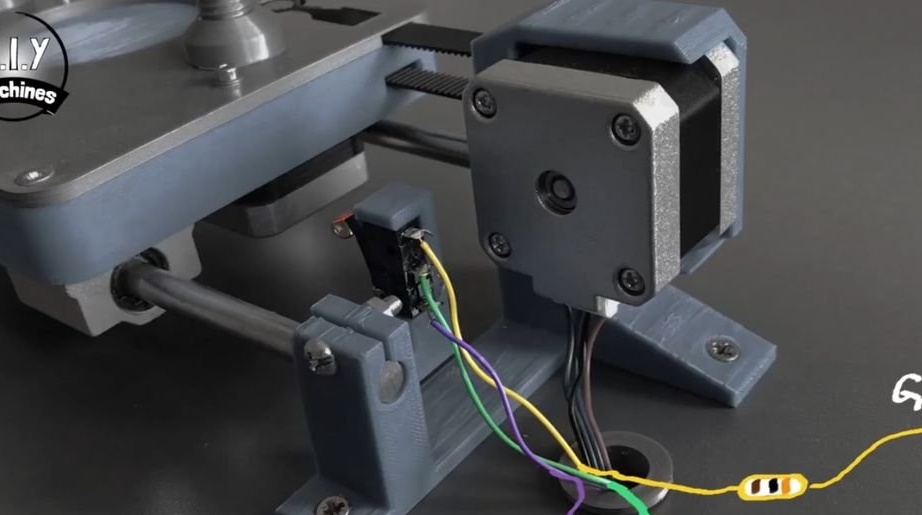
Trin to: Motorophæng
Udskriver motorholderen, filen "X_Axis_Motor_Mount.stl". Fastgøres på bordpladen i en afstand af 95 cm fra strammeren og 5 cm fra bordkanten.
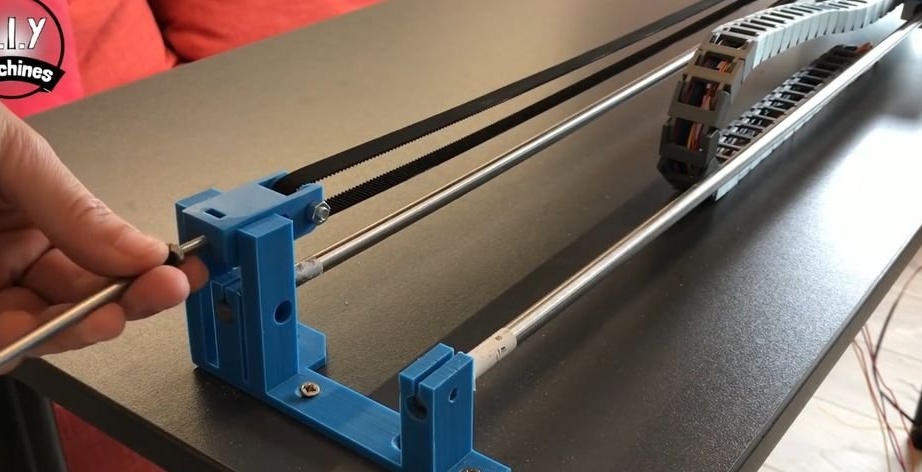
Trin tre: Guider
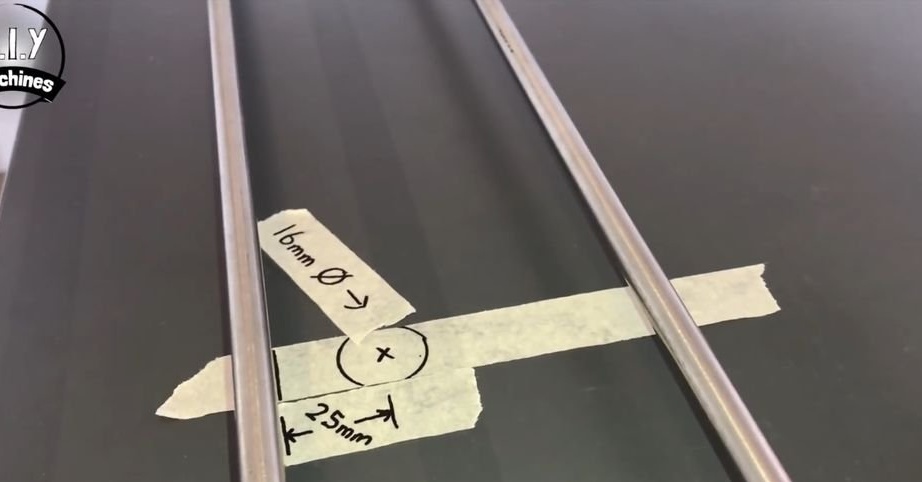
Sætter guider. Længden på stængerne er 1 meter.
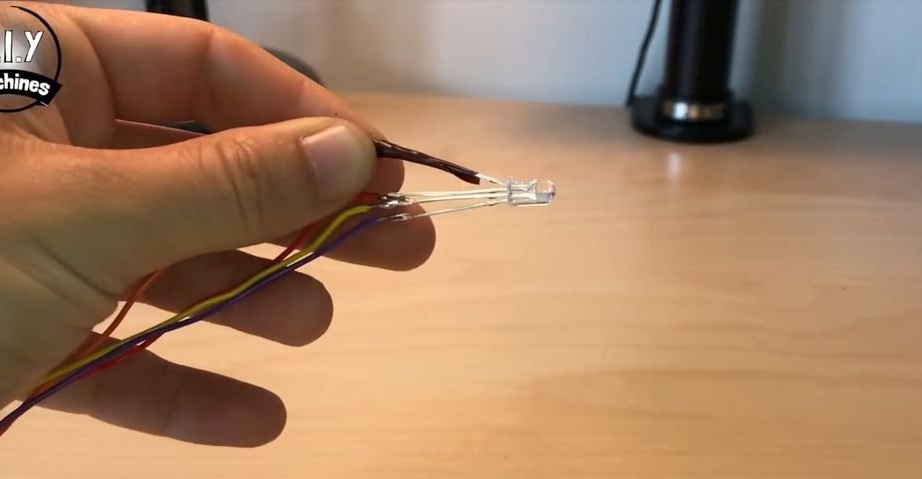
Trin fire: LED
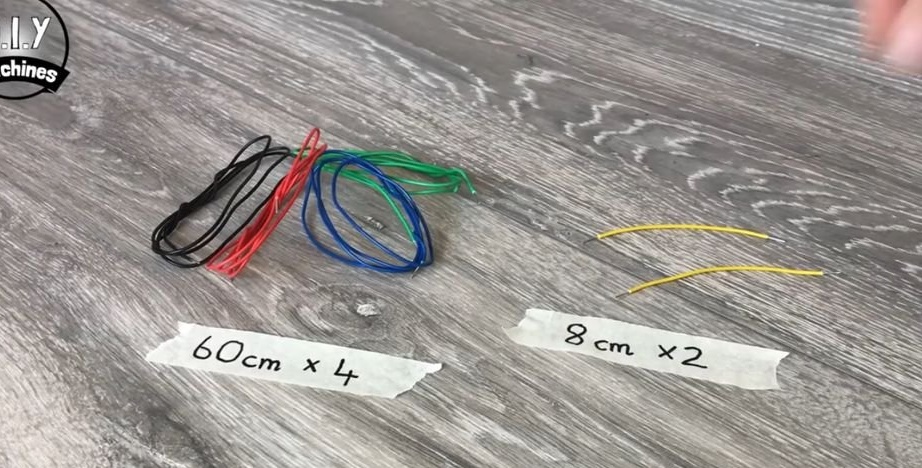
Masteren bruger RGB LED til indikation. Lodde 180 cm ledninger i forskellige farver til hvert ben. Krydset isolerer.




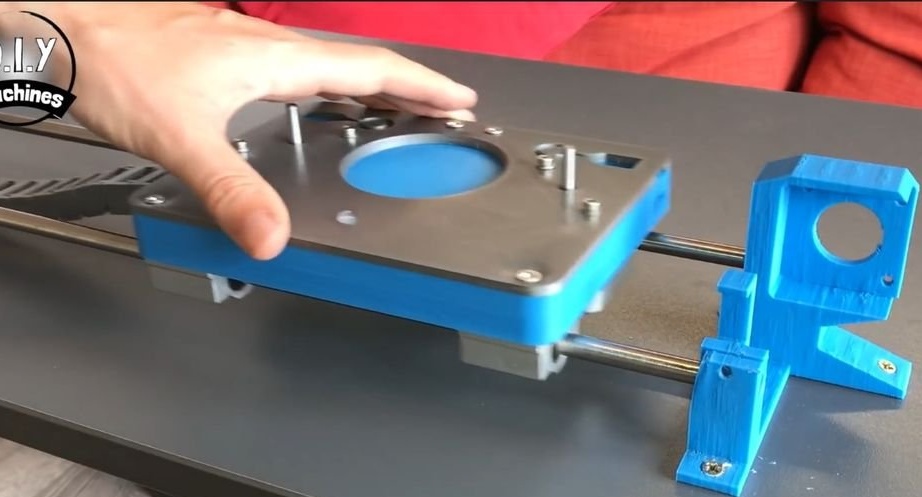
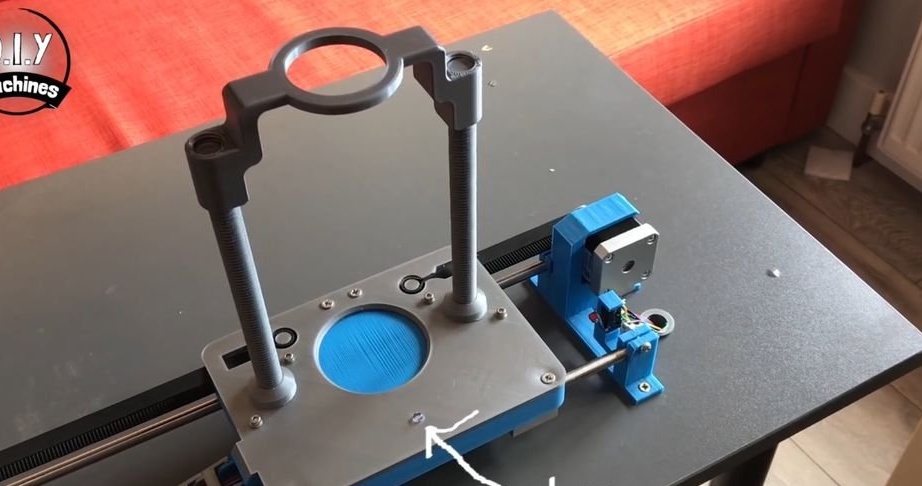
Trin fem: platform
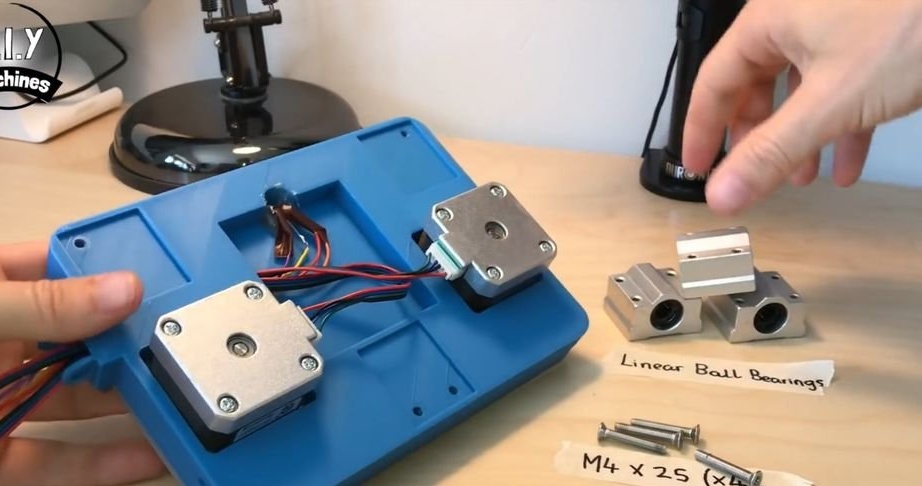
Udskriver delen 'slider_base_v3.stl'. Fastgør en LED. Installerer trinmotorer.
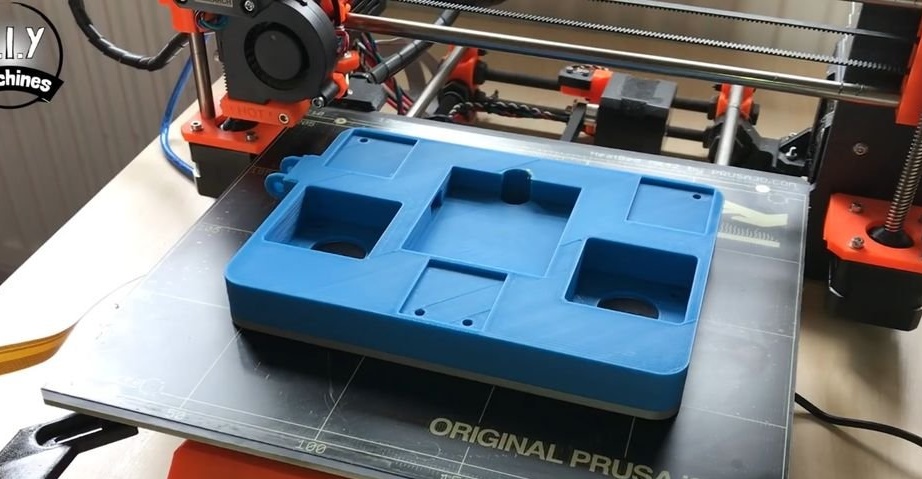

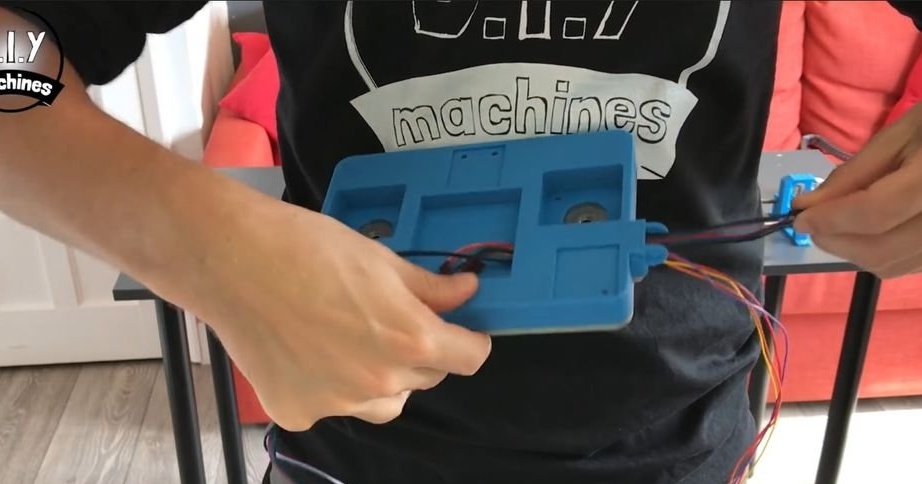
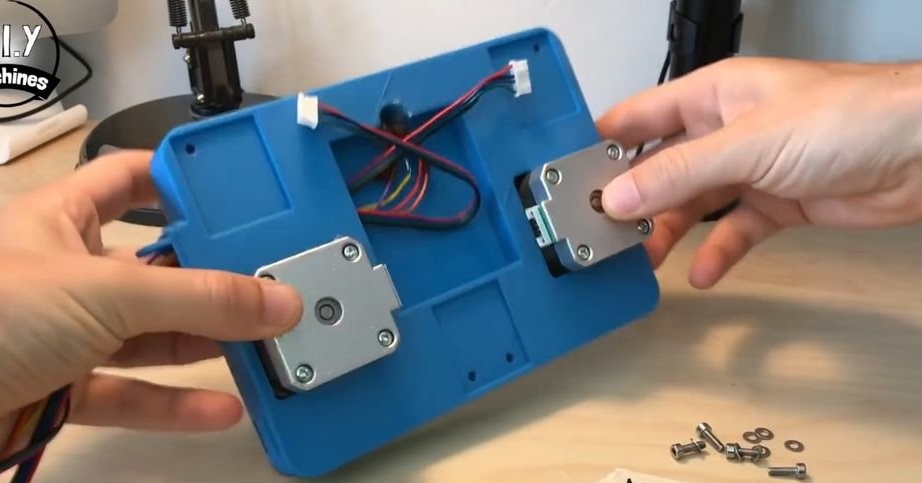
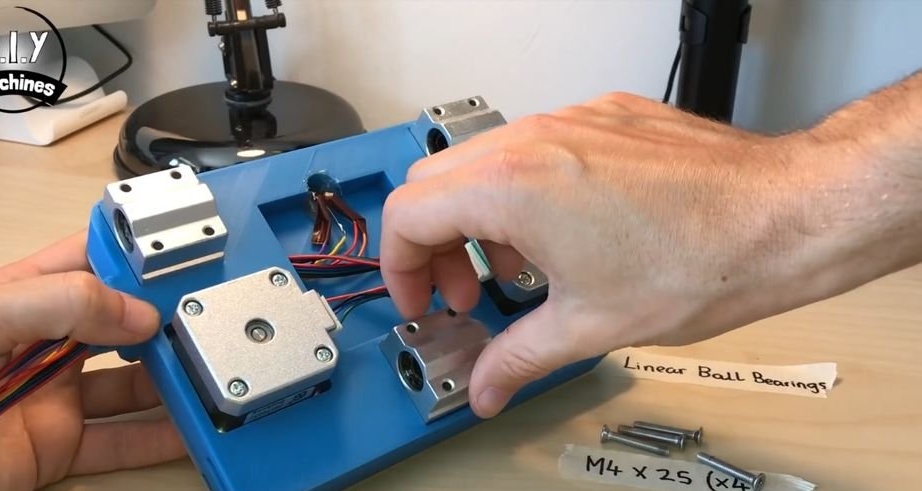
Installerer lineære lejer.
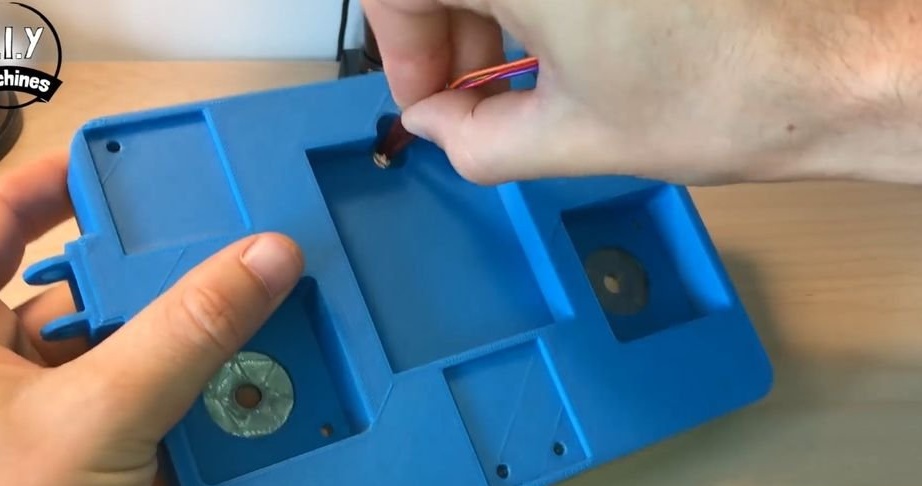
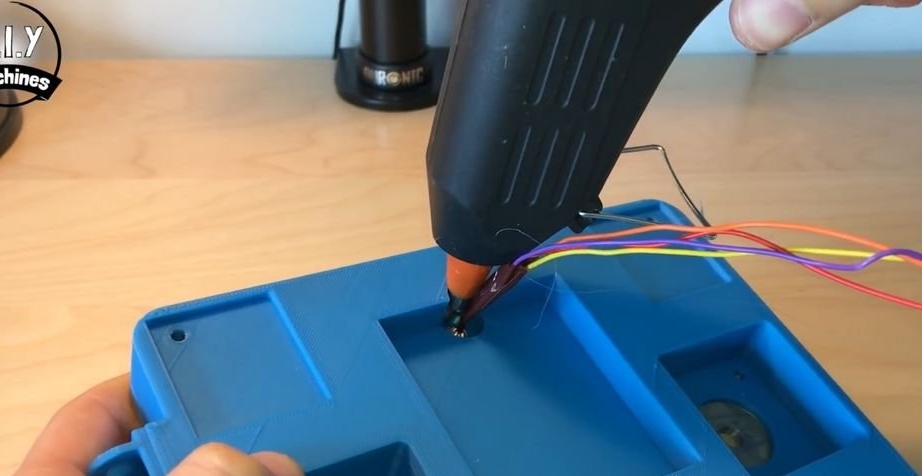
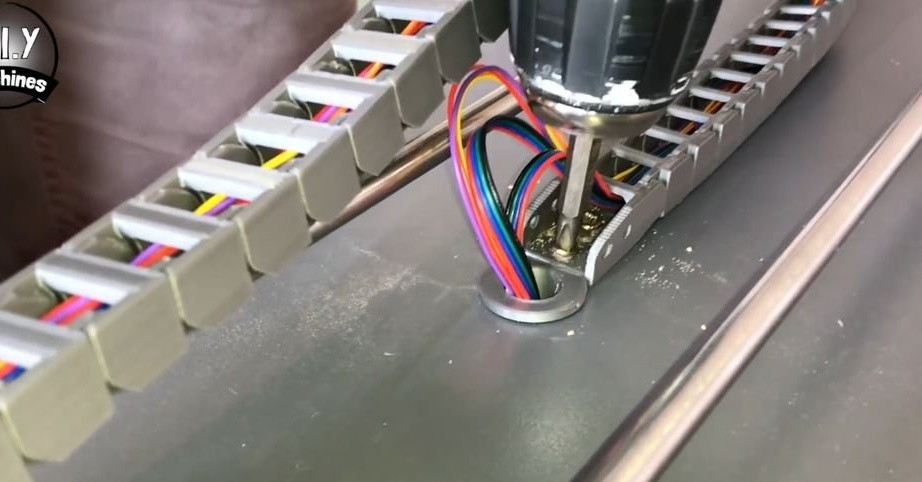
Trin seks: Kabelkanal
Kabelkanalen til enheden består af separate segmenter, der er forbundet i et enkelt kredsløb.Inde i kredsløbet er ledninger lagt. Kæden er bevægelig og bøjes om nødvendigt. Kædesegmenter udskrives også på printeren.


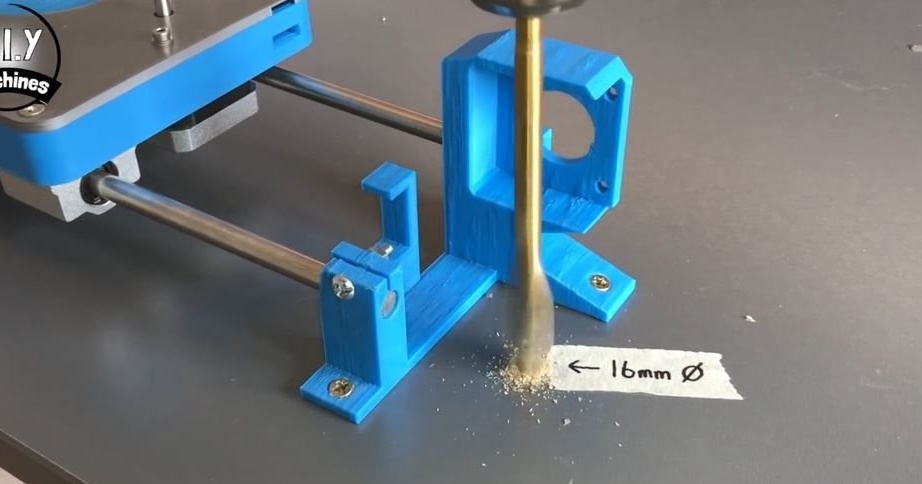
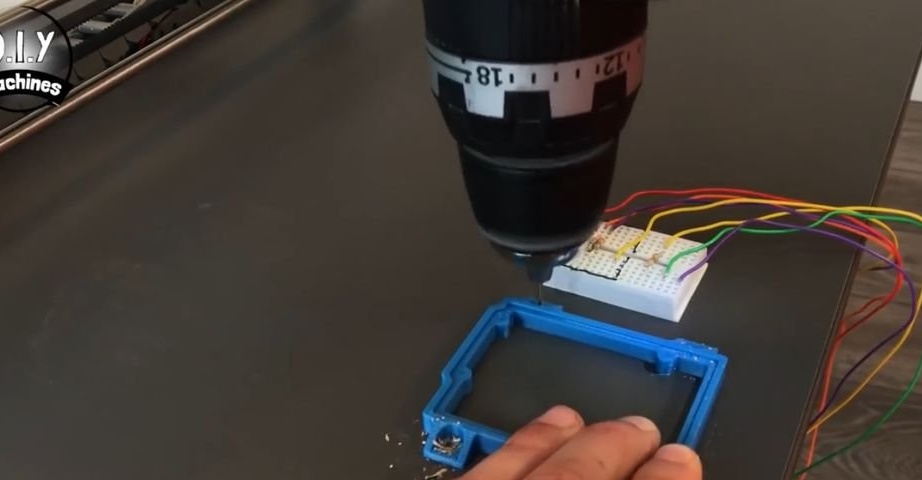
Bor et hul på 16 mm i en afstand af 25 mm fra den ekstreme føring og 47 cm fra strammeren. Sæt ærmet "Table_Tidy.STL" i hullet. Fastgør kabelkanalen den ene ende på platformen, den anden på bordpladen ved siden af bøsningen. Strækker ledninger.



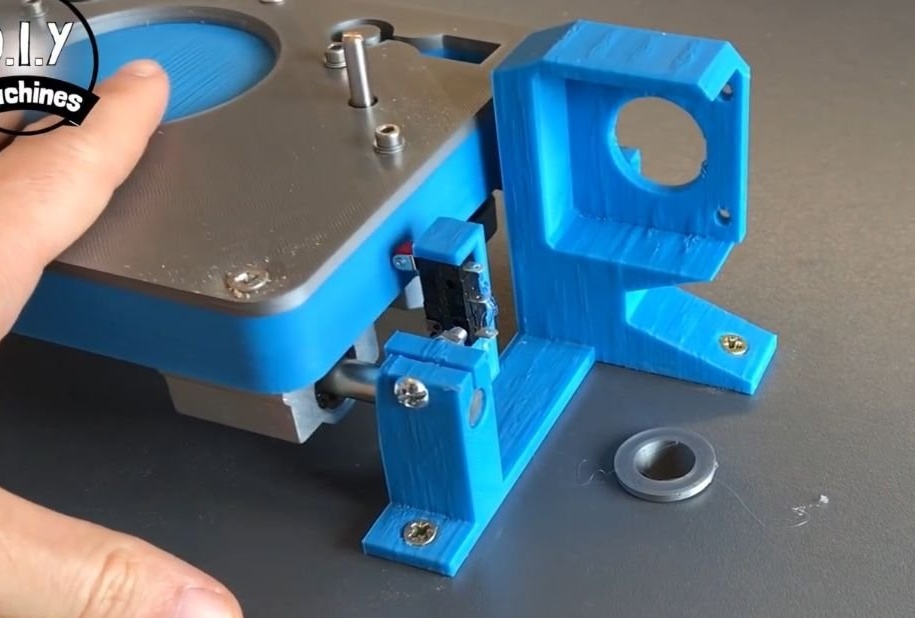
Syvende trin: skifte
Ved siden af motorholderen bores et andet 16 mm hul. Sæt en ærme i det. Fastgør traileren til holderen. Lodde til sine kontakter for 1 meter ledning.

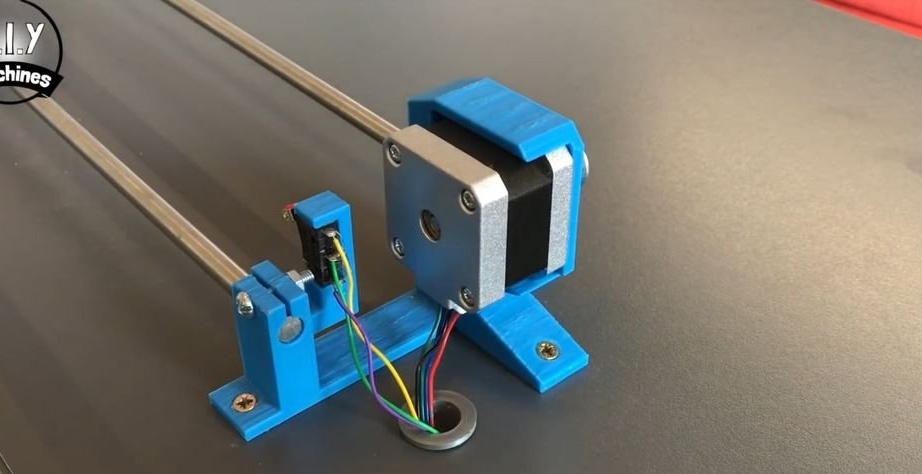
Trin otte: X-aksemotor
Sikrer motoren til montering.

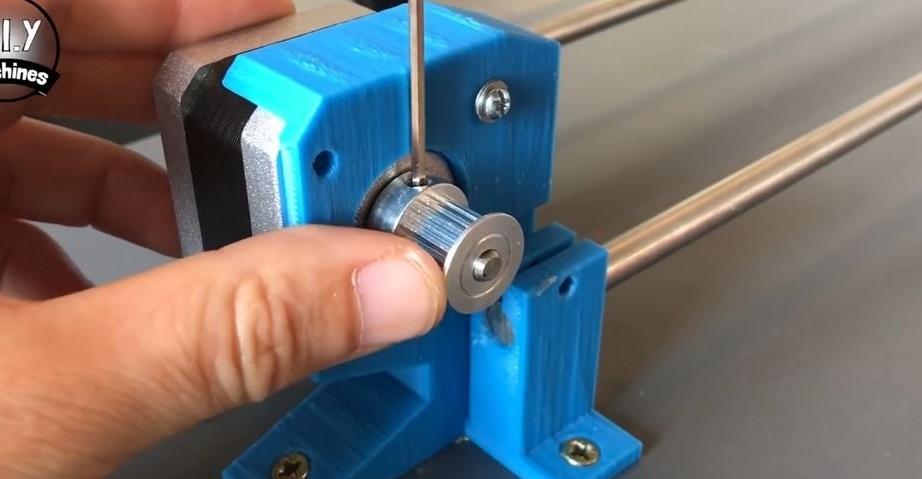
Trin ni: Bælte
Fastgør remskiven til motorakslen. Fastgør enden af bæltet til platformholderne. Trækker bæltet gennem remskiven og gennem strammehjulet. Fastgør den anden ende til holderne. Om nødvendigt kan båndspændingen justeres ved at stramme eller skrue skruen ud.







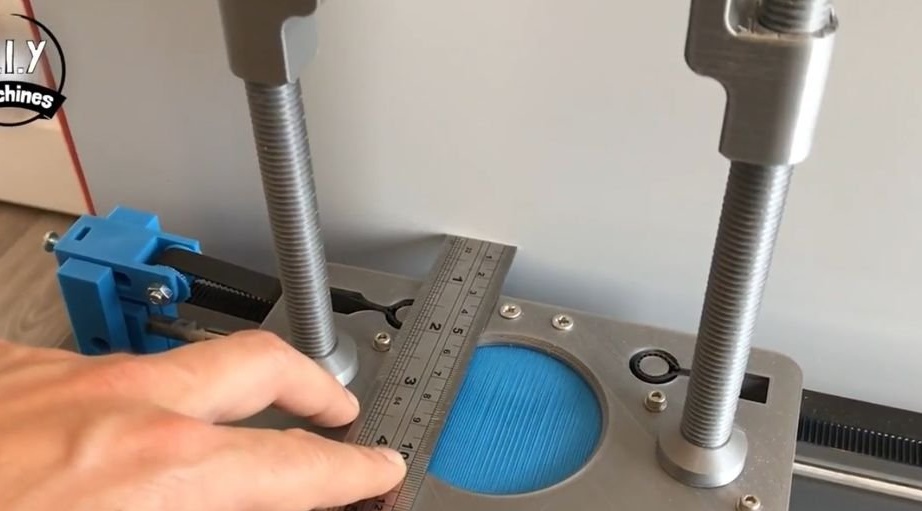
Trin ti: Cupholder
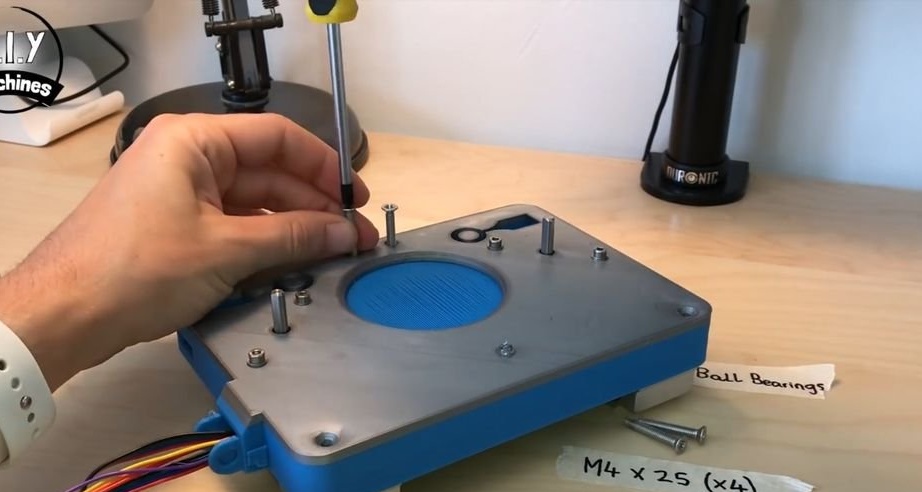
Udskriver to gevindstænger main_rod2.3.STL og holder Dispenser_Paddle_V2.STL. Fastgøres på en platform.



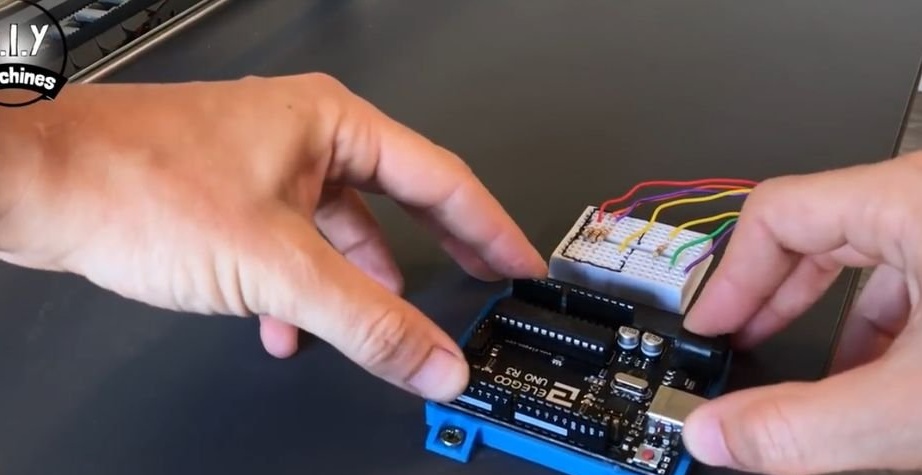
Trin elleve: indikator, trailer, brødbræt
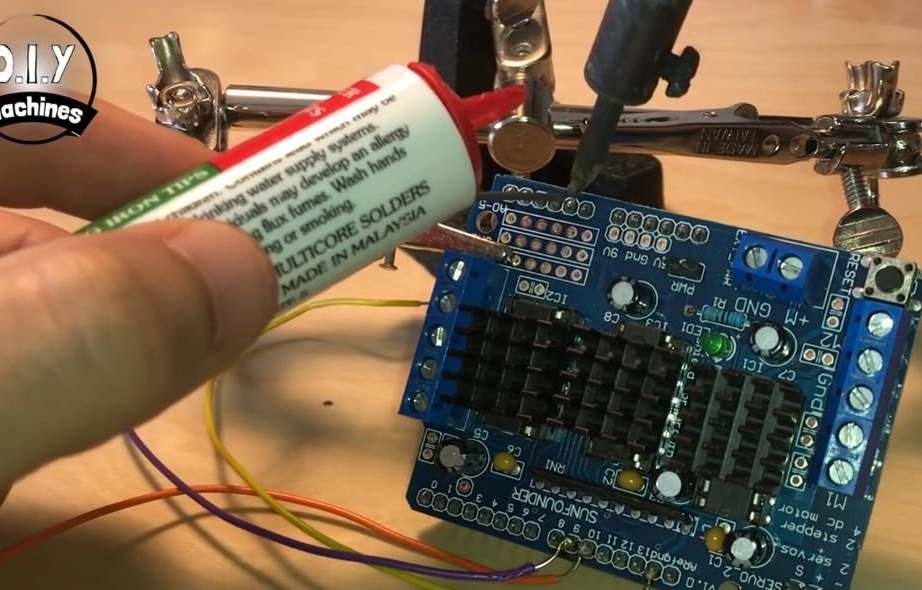
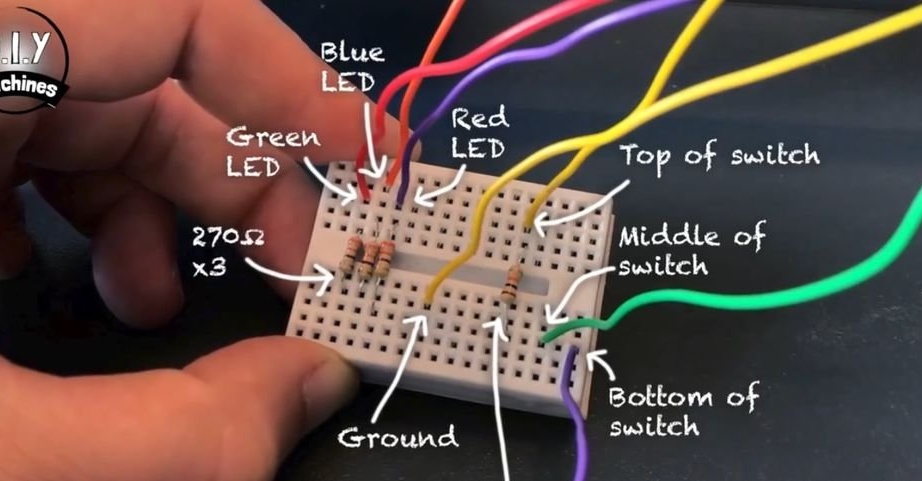
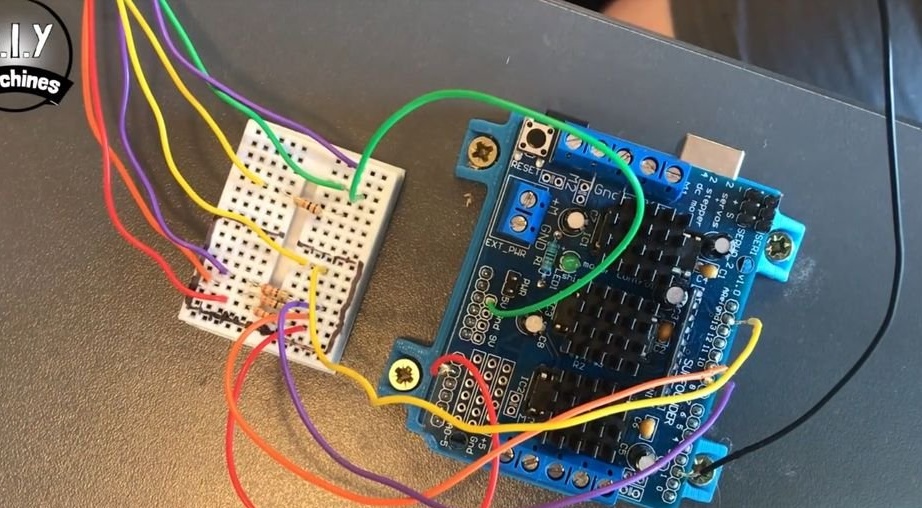
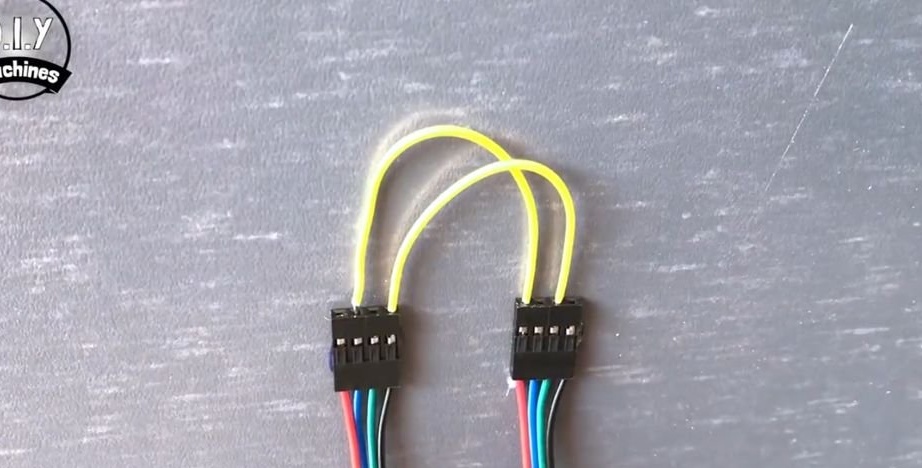
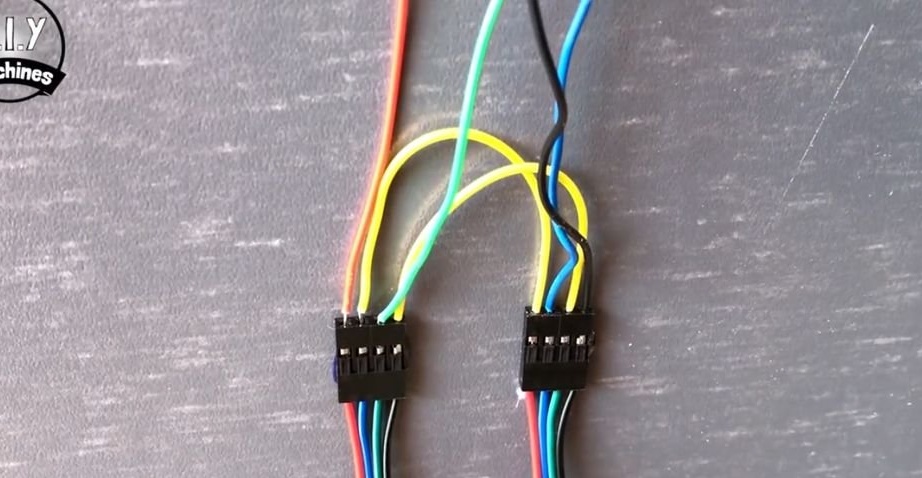
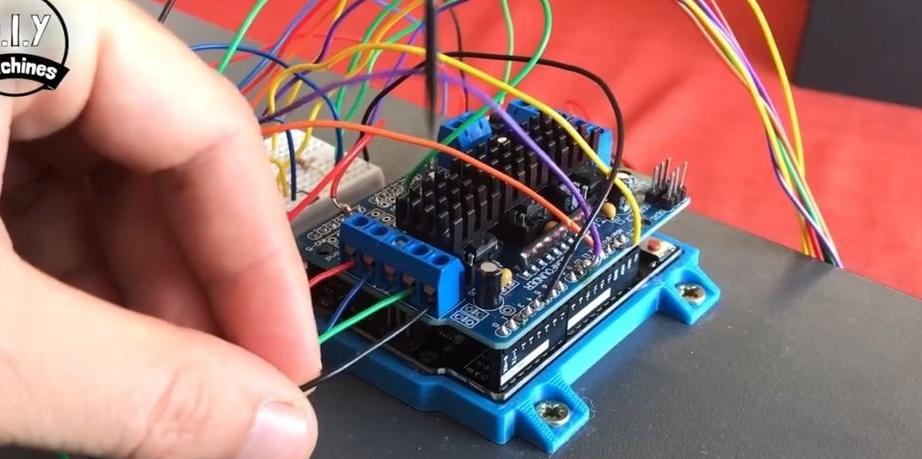
RGB LED, har fire ben. Et ben er almindeligt og tre i farve. Skibsføreren tager yderligere fire ledninger, hver ca. 15 cm lange, og sælger dem som følger (af farverne på LED-glød) til motordrivermodulet:
Rød til pin D9
Blå til pin D10
Grøn til pin A1
Katoden til GND-stiften.
Den forbinder traileren: den øverste kontakt er GND, den midterste kontakt er 5 V, den nederste kontakt er udgang nr. 2.
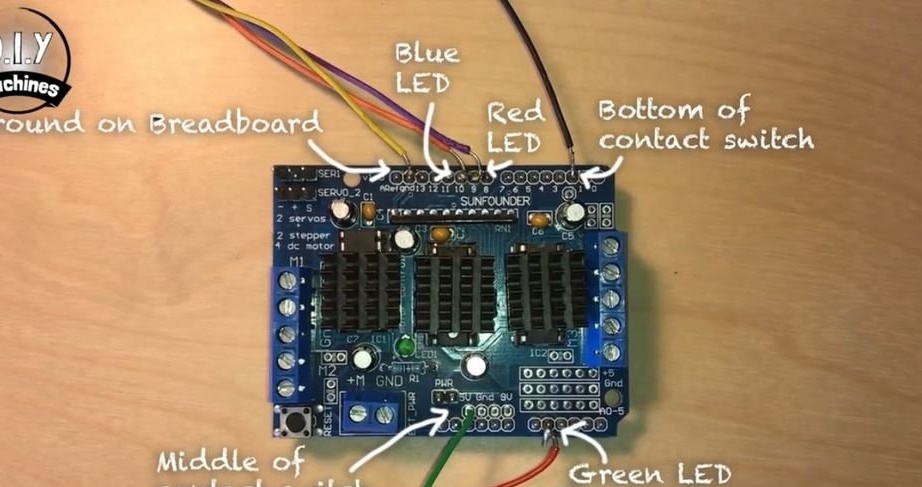
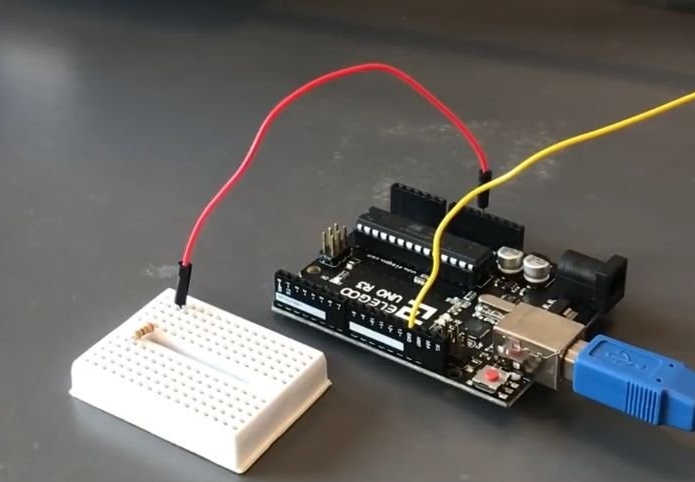
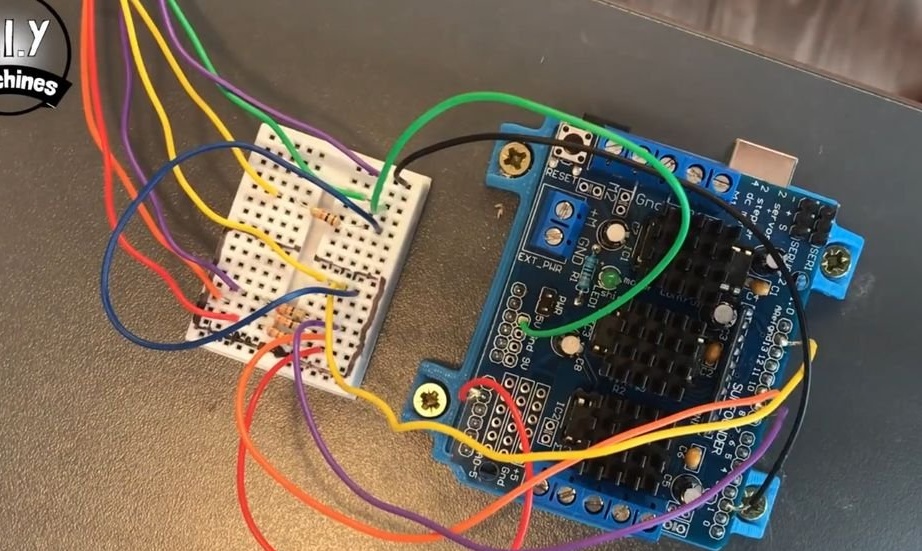
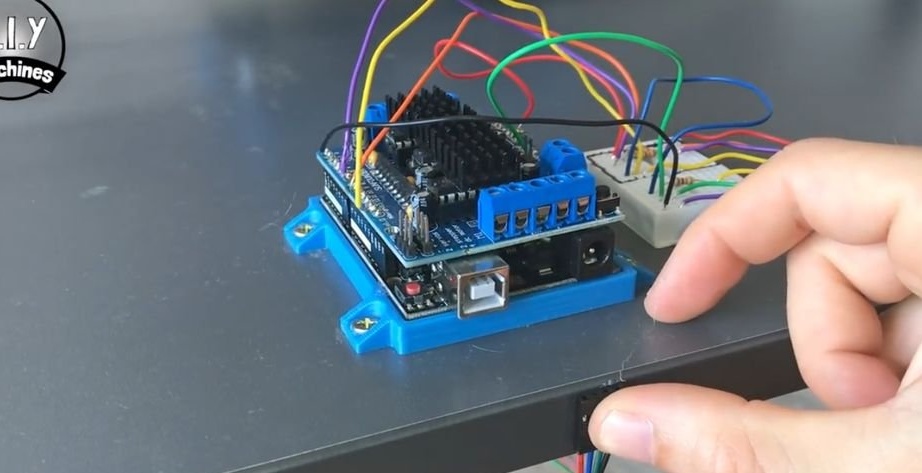
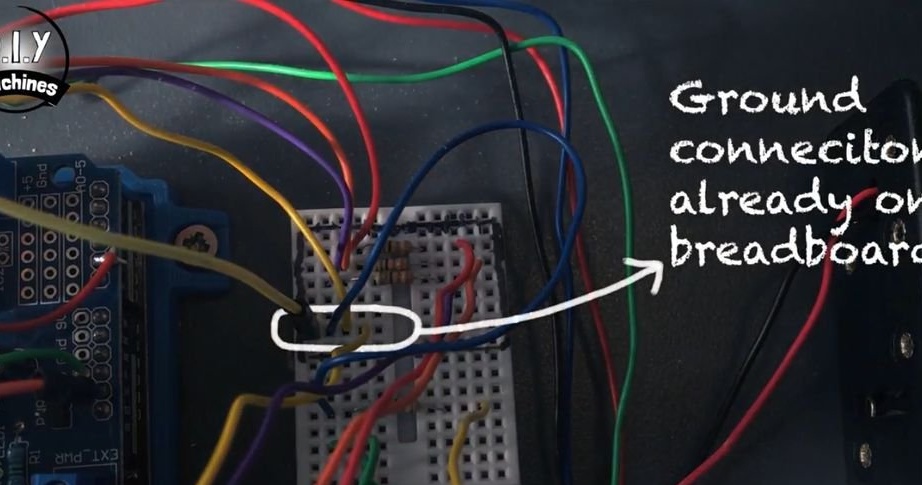
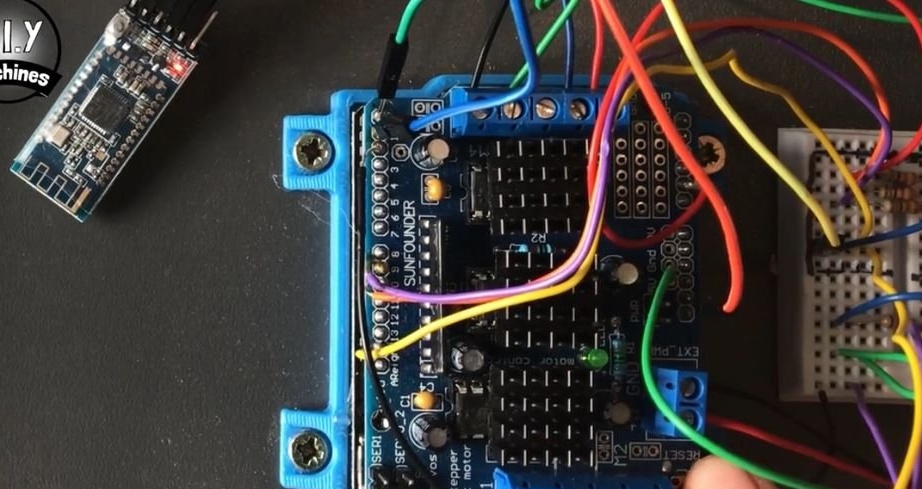
Dernæst monteres alt på en brødbræt (se foto). Fastgør brættet til bordet.
Trin tolv: Arduino
Udskriver monteringsplade til Arduino. Fastgør pladen på bordet. Fastgøres på en tallerken med Arduino. Installerer et motordrivermodul på Arduino.
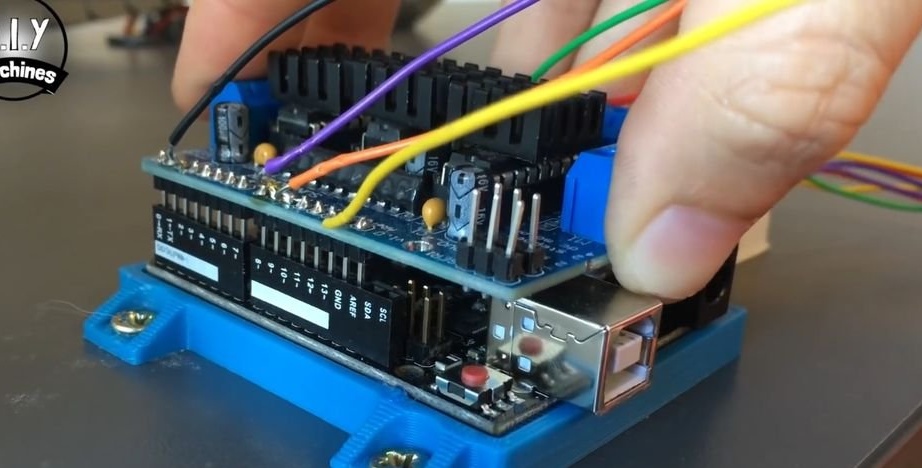
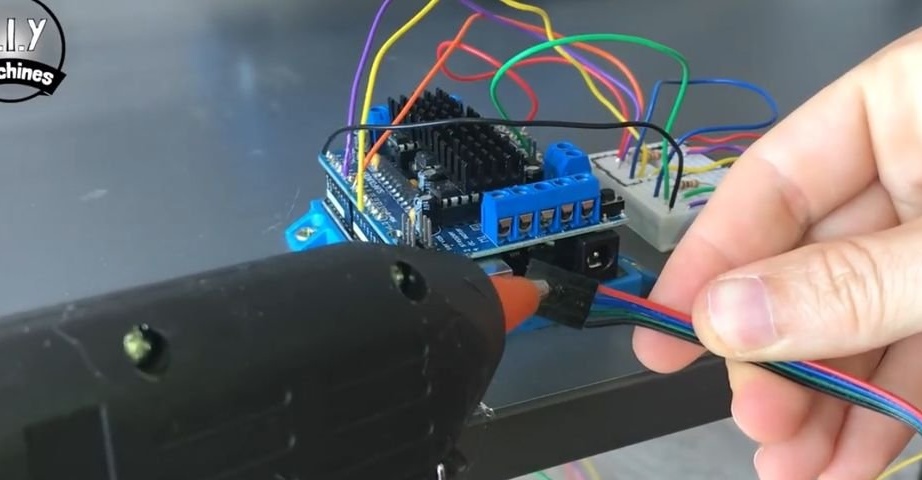
Forbinder ledningerne fra føreren til brødbrættet, som på billedet.
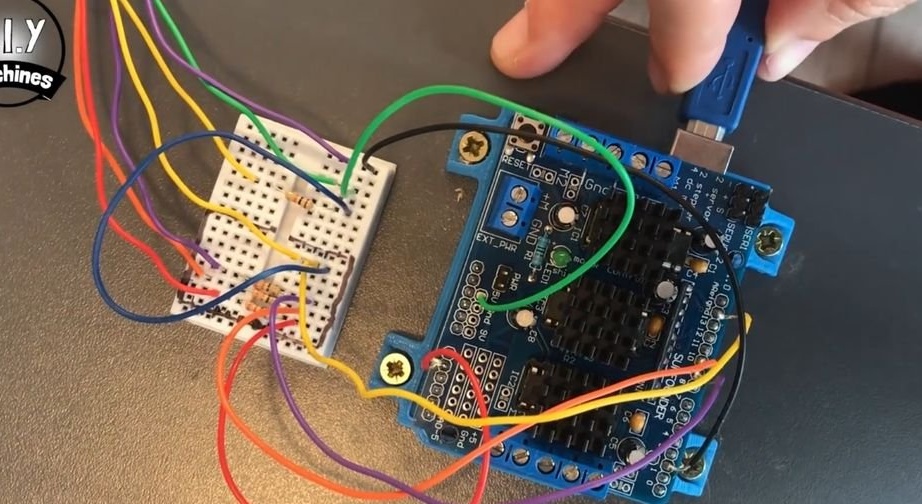
Trin tretten: Download kode
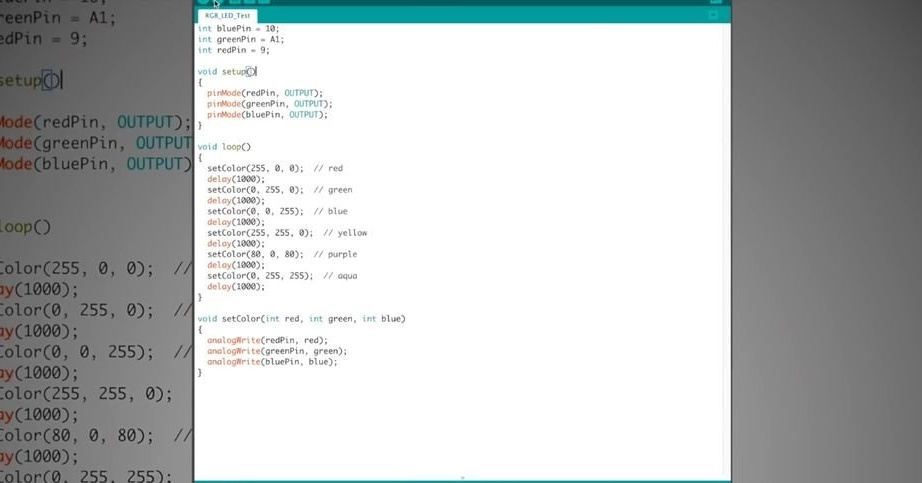
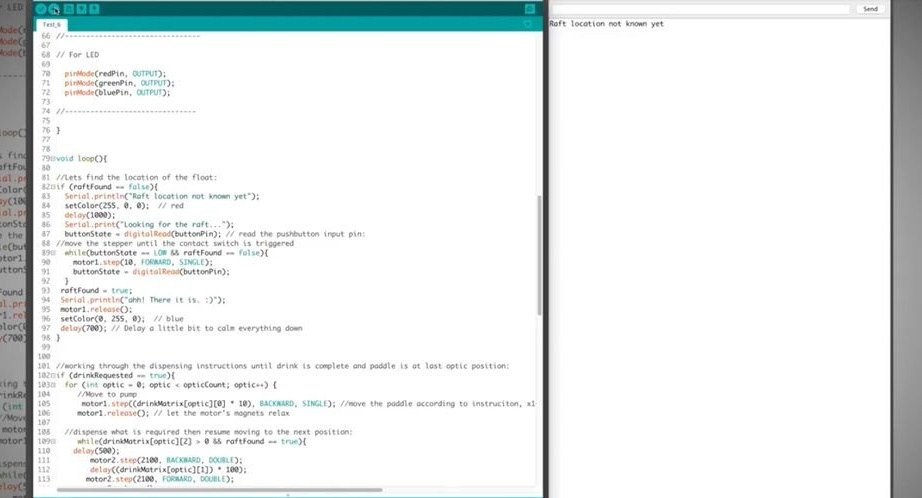
Forbinder Arduino til en pc og downloader koden. Kode kan findes her.
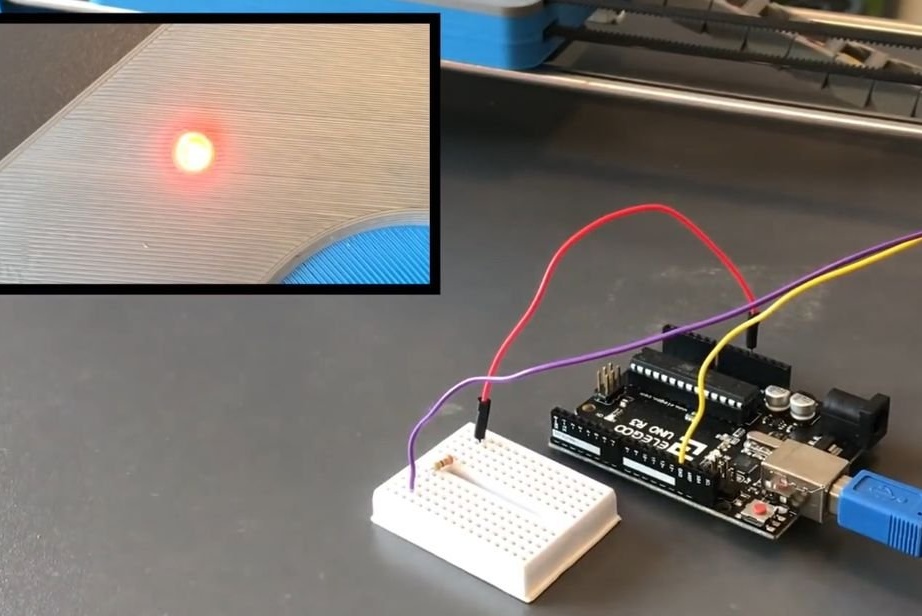
Kører LED-testkoden. Lysdioden skal lyse op i forskellige farver.
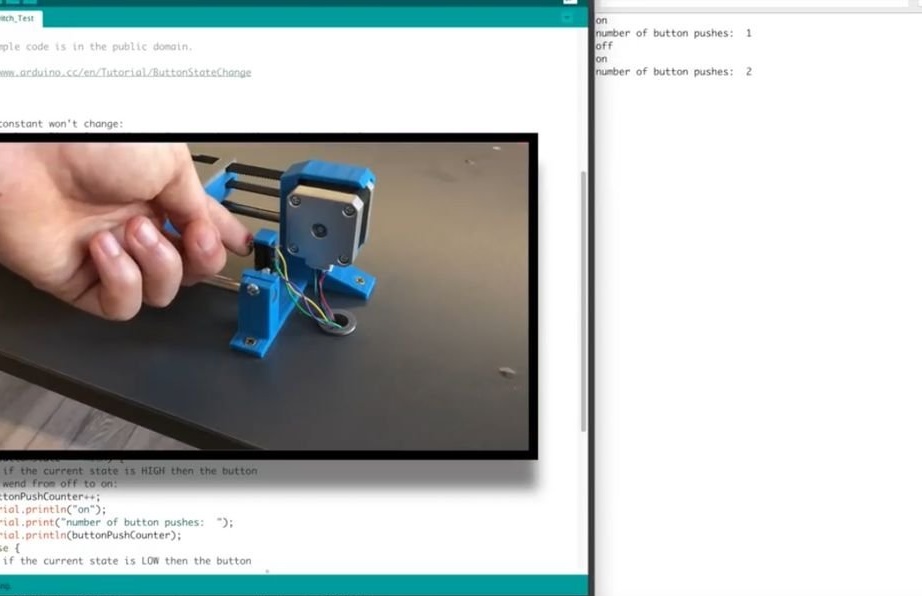
Følgende script til download er "Contact_switch_test". Så snart den er indlæst, skal hvert tryk på grænsekontakten vises på skærmen.

Trin fjorten: tilslutning af X- og Z-motorerne
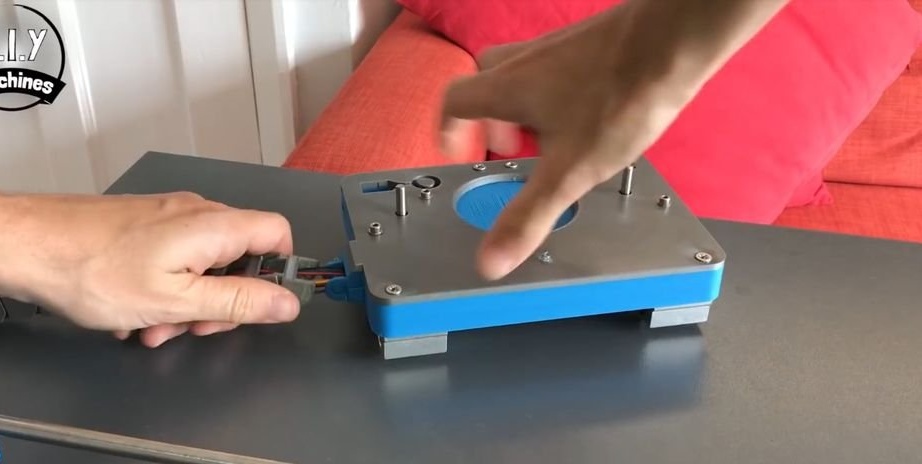
Fastgør stikket, der kommer fra motoren X gennem brødbrættet på bordet. Tilsluttes med førerkabler.
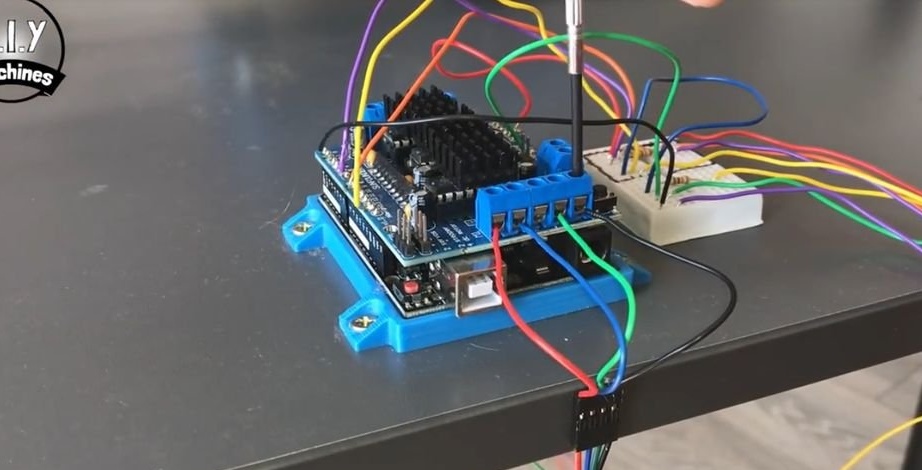
Tilslutter Z-akse trinmotorer.
Trin Femten: Batterirum
Fjerner en jumper på et modul. Tilslutter batterirummet.
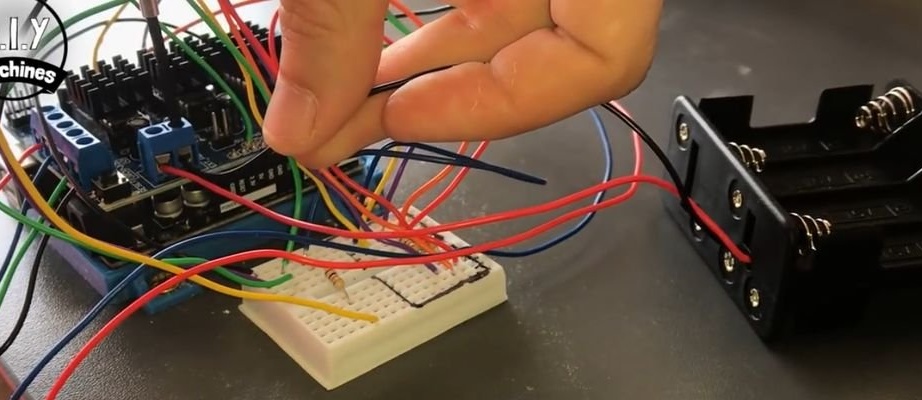
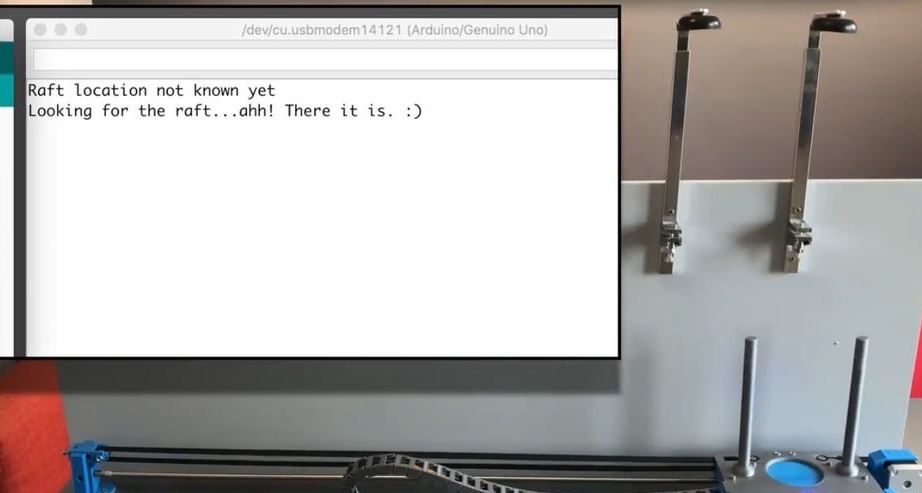
Nu kan du køre "test 1". Den røde LED lyser, og platformen skal nå grænsekontakten. Derefter lyser LED'en grønt.
Trin seksten: flaskeholdere
Brug af konsoller sikrer bagvæggen på MDF.




Flytter platformen yderligere 1 cm fra grænsekontakten. Justerer glasholderen og fastgør flaskeholderen med dispenseren (desværre gav master ikke en beskrivelse for fremstilling eller køb af holderen). Næste. holdere fastgøres hver 12. cm.



Trin sytten: kode, kalibrering, test
Indlæser hovedkoden kl https://www.thingiverse.com/thing:2478890
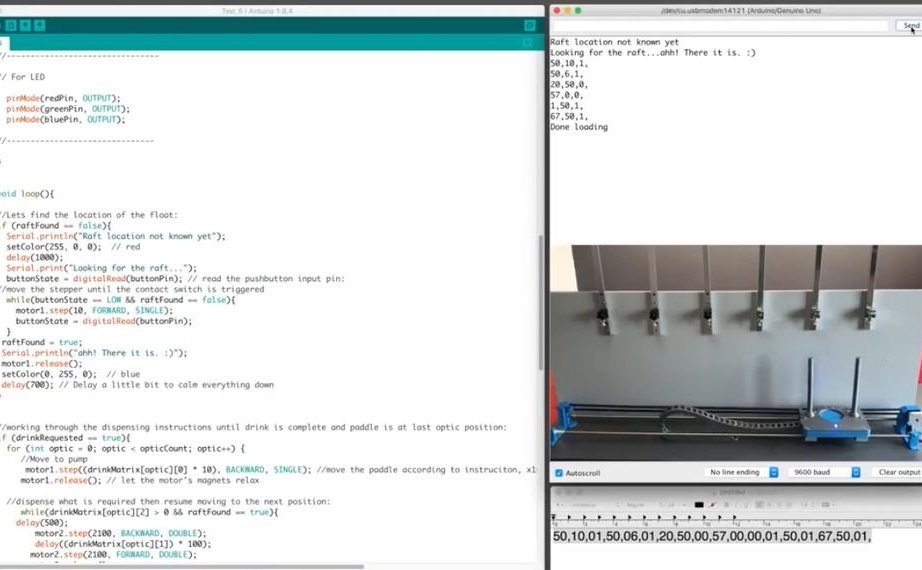
Følgende værdier indstilles i indstillingen: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Skibsføreren har seks dispensere. I indstillingerne er der seks grupper på tre, hvor det første ciffer er afstanden fra grænsekontakten, den første dispenser, den anden dispenser osv., Det andet ciffer er det tidspunkt, hvor drikken blev hældt i glasset, den tredje er antallet af hældning. Alle disse værdier kan ændres efter behov.


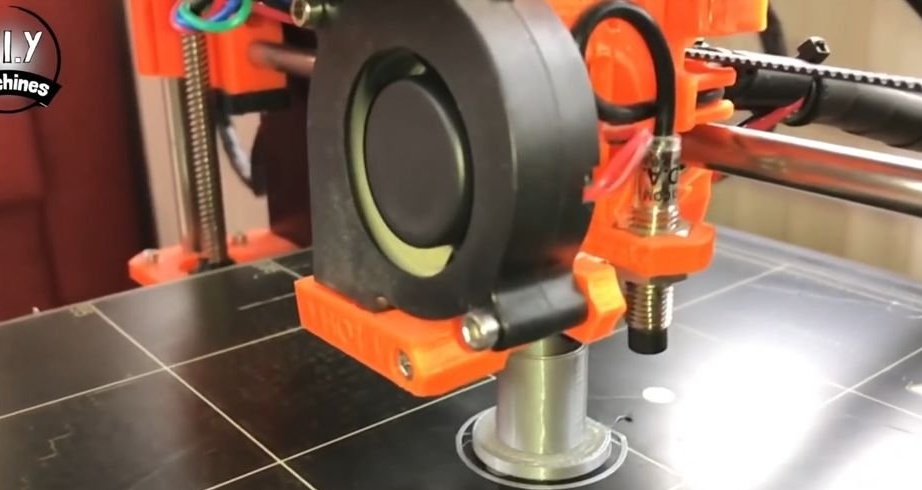
Den første drink, som enheden tilberedte, var gin og cola. For at udligne trykket i flasken med cola, skal du lave et hul. Derefter indstiller guiden de nødvendige parametre.



Trin atten: Bluetooth-modul
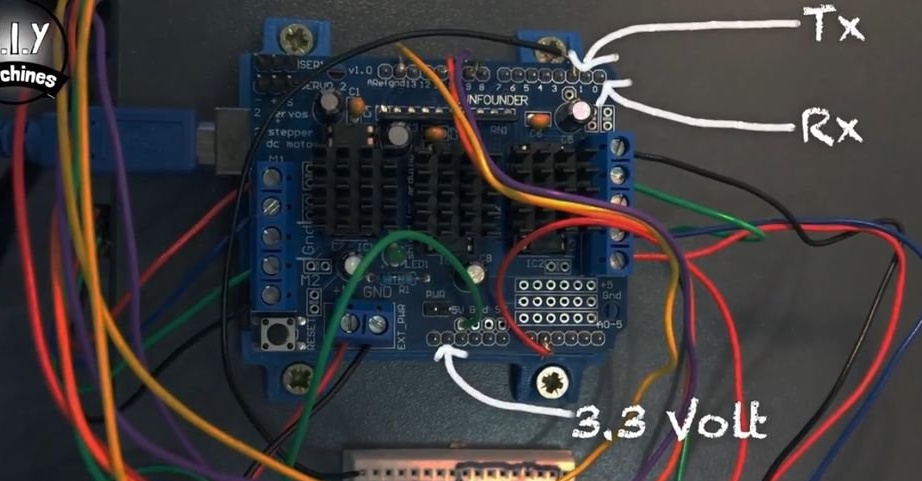
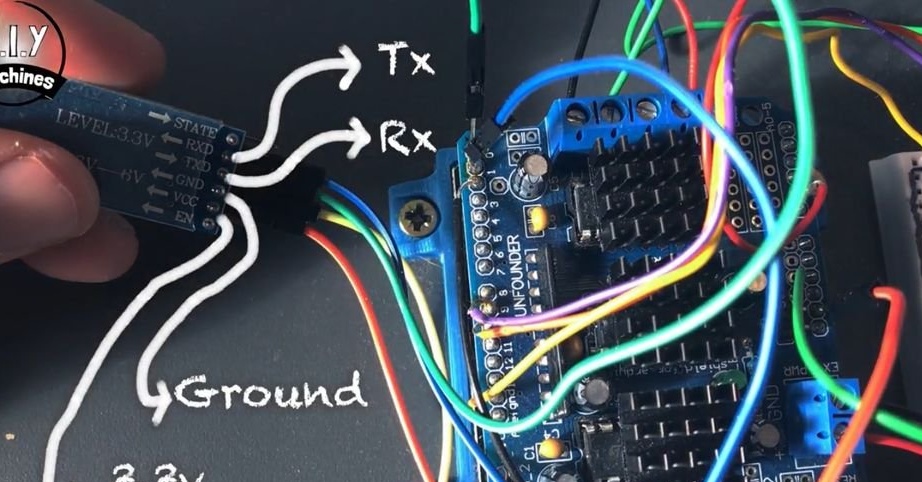
For at kontrollere bartender fra gadgeten installerede masteren et Bluetooth-modul. Modulet tilsluttes som følger.
HM10 -> Arduino Shield
RXD ------> TX
TXD -------> RX
GND ------> Jord
VCC ------> 3.3V

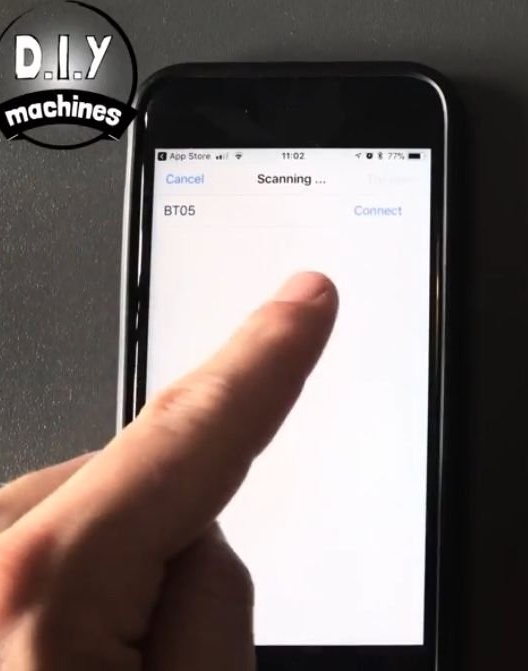
Skibsføreren har en smartphone, der kører iOS. Til dette system henter han “hm10 bluetooth serial lite” fra applikationsbutikken. Derefter oprettes forbindelser og indtastes indstillinger.

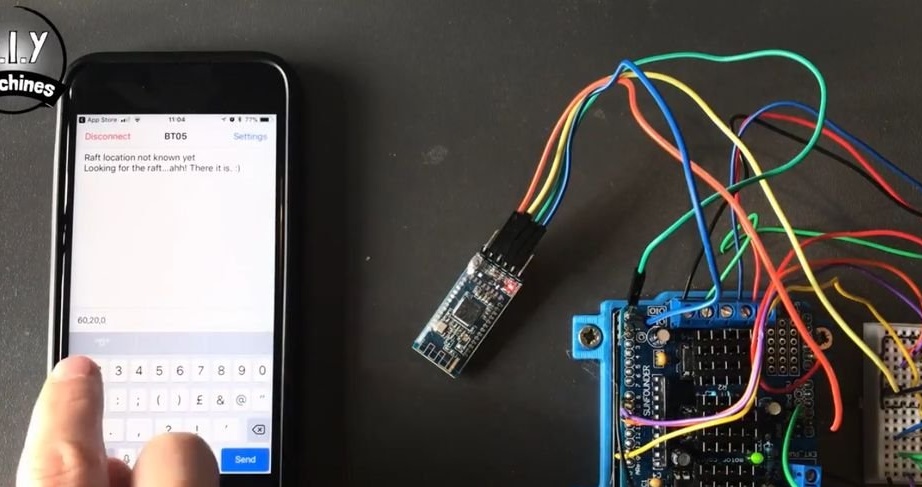
Alt er klar og for mere komplet information et par videoer.