
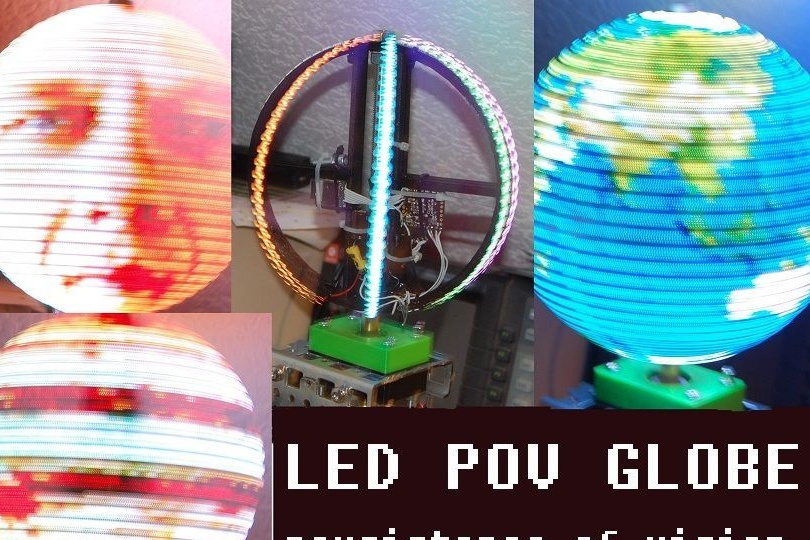
Denne tutorial handler om, hvordan man bygger en POV-klode med mindre. elektronisk komponenter end andre lignende enheder. Gennem brug af RGB-LED'er med en integreret APA102-controller. Dette sparer dig for lodning af adskillige ledninger. Du kan læse mere om dem. Disse LED'er har ikke brug for en ekstra driver. De er forbundet direkte til mikrokontrolleren på to måder. Dette giver dig mulighed for at skifte lysdioder meget hurtigt. For at få et stabilt billede kommer SPI-synkronisering med en frekvens på 10 MHz. Et andet plus ved dette design er brugen af et flash-kort, der gemmer billedet i BMP-format.
1 krævede materialer

Til jordens akse har du brug for:

1. Stud med M8 gevind og en længde på 250 mm
2. Nød M8
3. Messinghylster 10 mm og 100 mm lang
4. Plastskiver 8 mm 2 stykker (STL-filer inkluderet)
5. kobling til dem, der vil bruge trinmotoren NEMA 17
For at tænde LED-ringen på skaftet har du brug for
1. kugleleje 6300 (10x35x11)
2. to konsoller til lejer. Trykt på en 3d printer eller lavet af træ.
3. Fire M4x40 bolte med møtrikker
4. Tips til ledninger 2 stk 8 mm
5. med en akseldiameter på 5 mm
6. 4 bolte M4 til motormontering
7. måske en fan til det.
Alternativt kan du bruge enhver motor med det rigtige drejningsmoment og hastighedskontrol. Motoren, der bruges i dette design, har et maksimalt drejningsmoment ved en strøm på 50A, men det maksimale strømforbrug under drift er kun 18A.
Brug for at kontrollere servomotordriveren
1.
2. to knapper
Strømforsyning 12V til motor og 5V til LED'er. Som strømforsyning kan du bruge den gamle enhed fra pc'en. Du kan købe en 12v / 5A strømforsyning og oprette forbindelse til den
Til LED-ringen har du brug for:
1.664 lysdioder 2 strimler på 32 stykker
2. Kondensator 1000 µF 10V
3. Hallsensor og magnet
4. Trækmodstanden 1k, 10k
5. Ringen skal udskrives på en 3D-printer eller bruge et stykke PVC-rør
6. Plastbånd (100 mm)
7. Et godt lim, der klæber sammen og ikke flyver fra hinanden ved 2500 o / min
Du har også brug for en Parallax Propeller Microcontroller. Eller du kan bruge en anden modellen controller, men derudover tage et gebyr for. Denne controller er programmeret og blinket så enkel som Arduino. Du har brug for en USB-TTL-adapter til at programmere begge controllere.
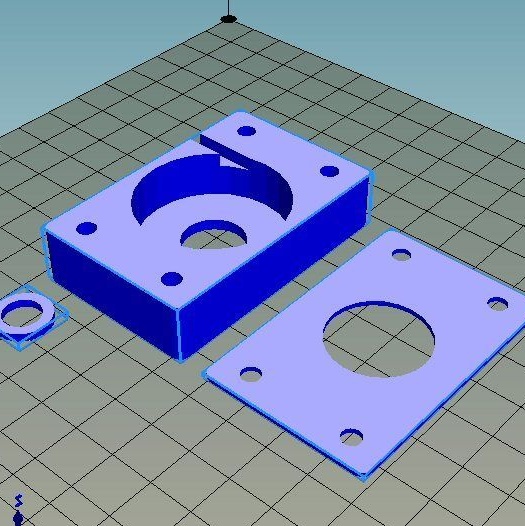
Boliger.
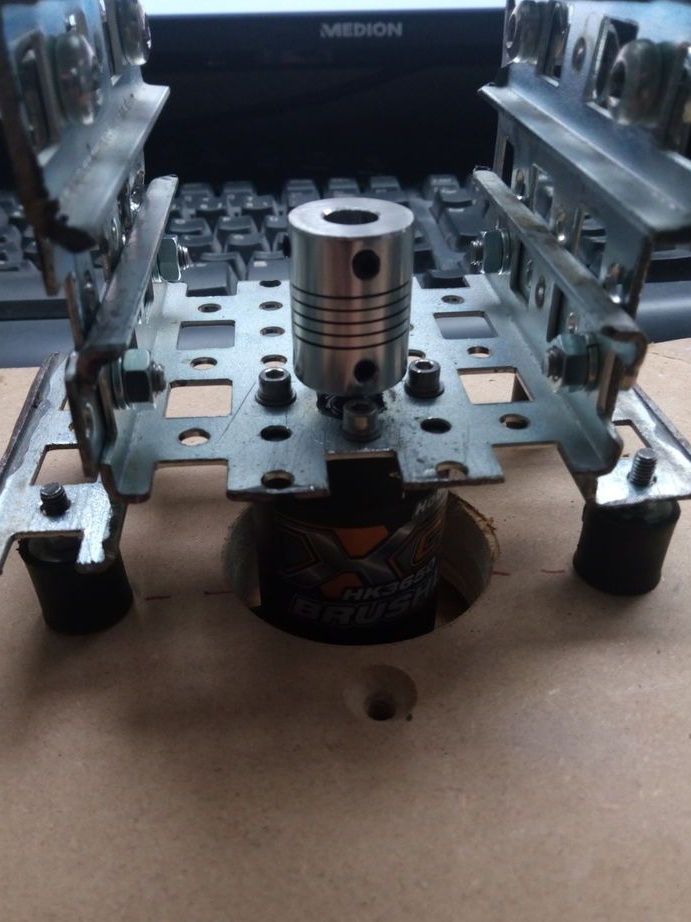
Boliger til hjemmelavet Du kan tage noget hårdt nok. Det vigtigste er, at du sikkert kan fastgøre motoren og lejerne.
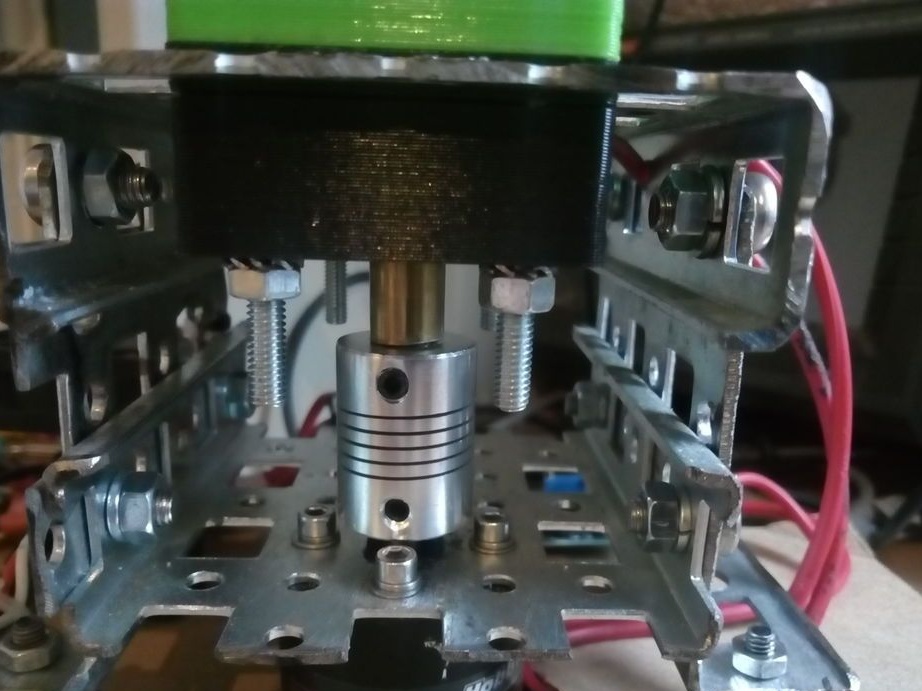
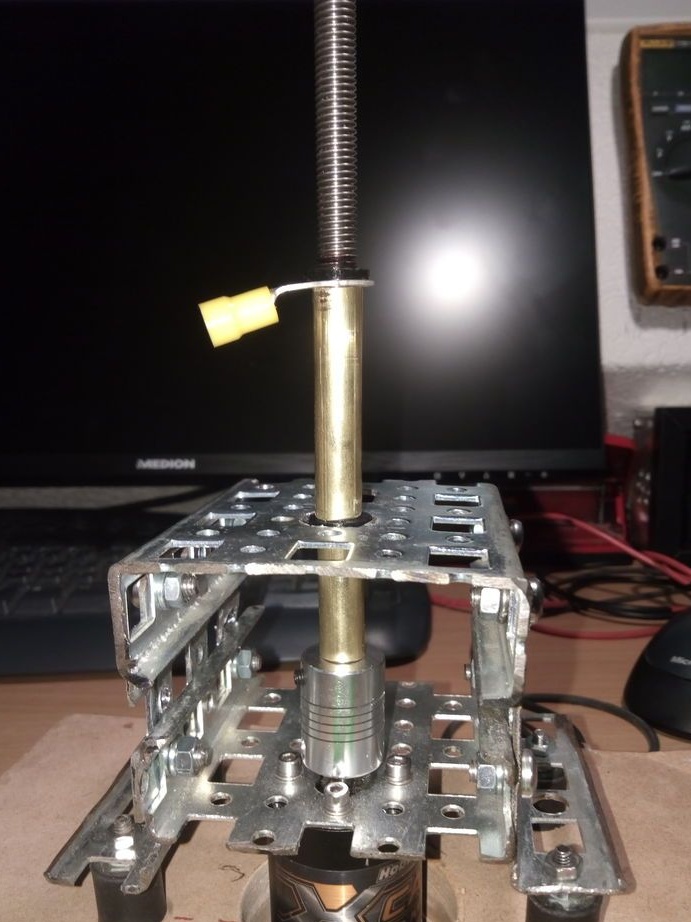
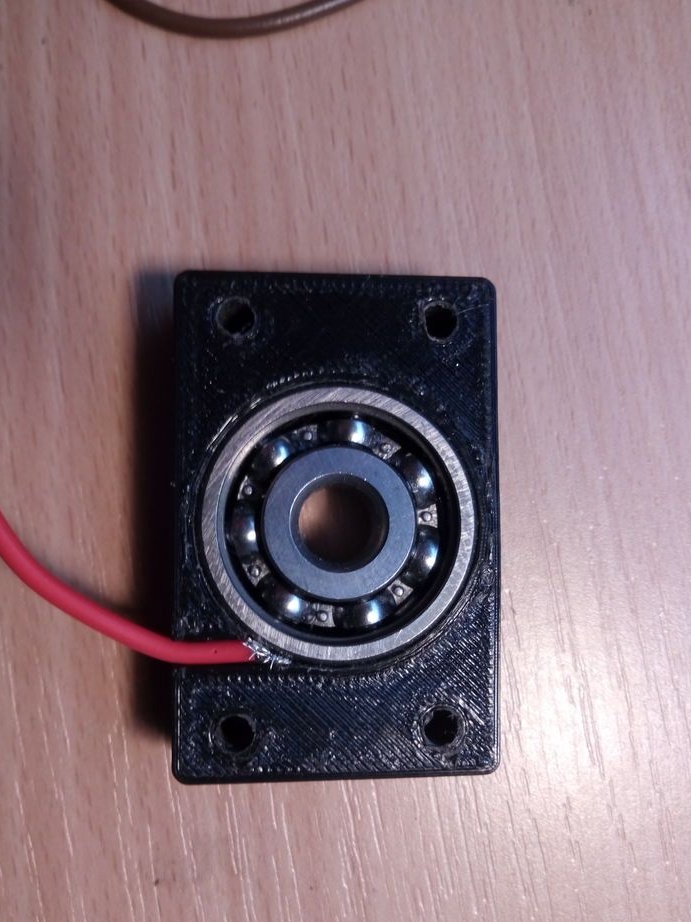
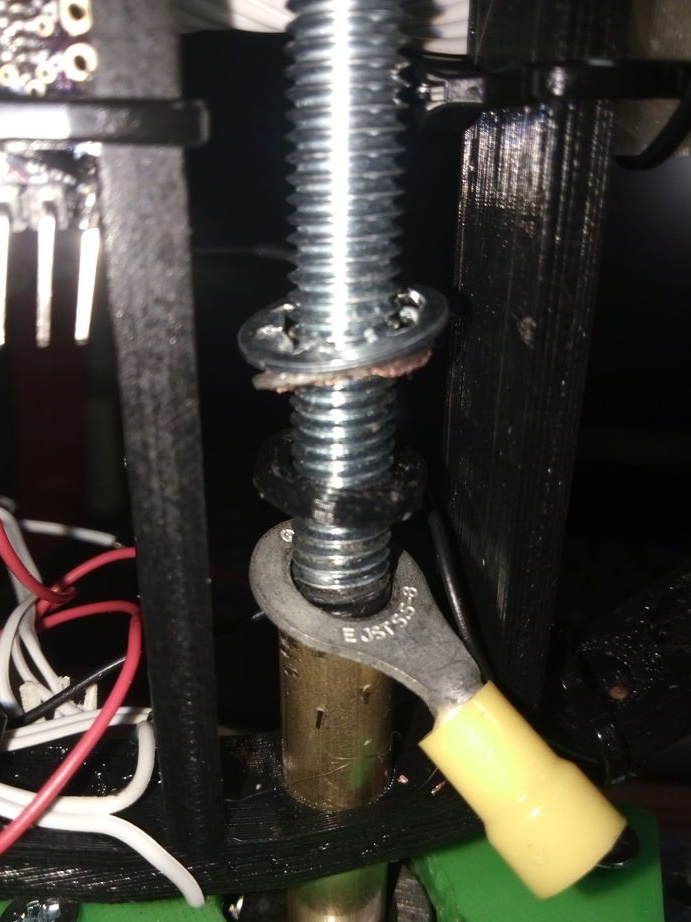
En 250 mm lang pind bruges til drivakslen.Længden af messingbøsningerne er 50 og 30 mm. Afhænger af ringstørrelse og skaftlængde. Den øverste og længere ærme skal isoleres fra stiften, fordi den bruges til at levere plus strøm til lysdioderne. For at gøre dette, skal du pakke det elektriske bånd på en hårnåle eller bruge varmekrymp. Der er også brug for to plastikskiver. Bøsningen skal bores til 8,5-9 mm, ellers passer den ikke. Den anden bøsning sammen med stangen danner en negativ kontakt.
Minuseffekten placeres i en speciel rille og presses mod lejet i beslaget, der kan udskrives på en printer. STL-fil i arkiv.


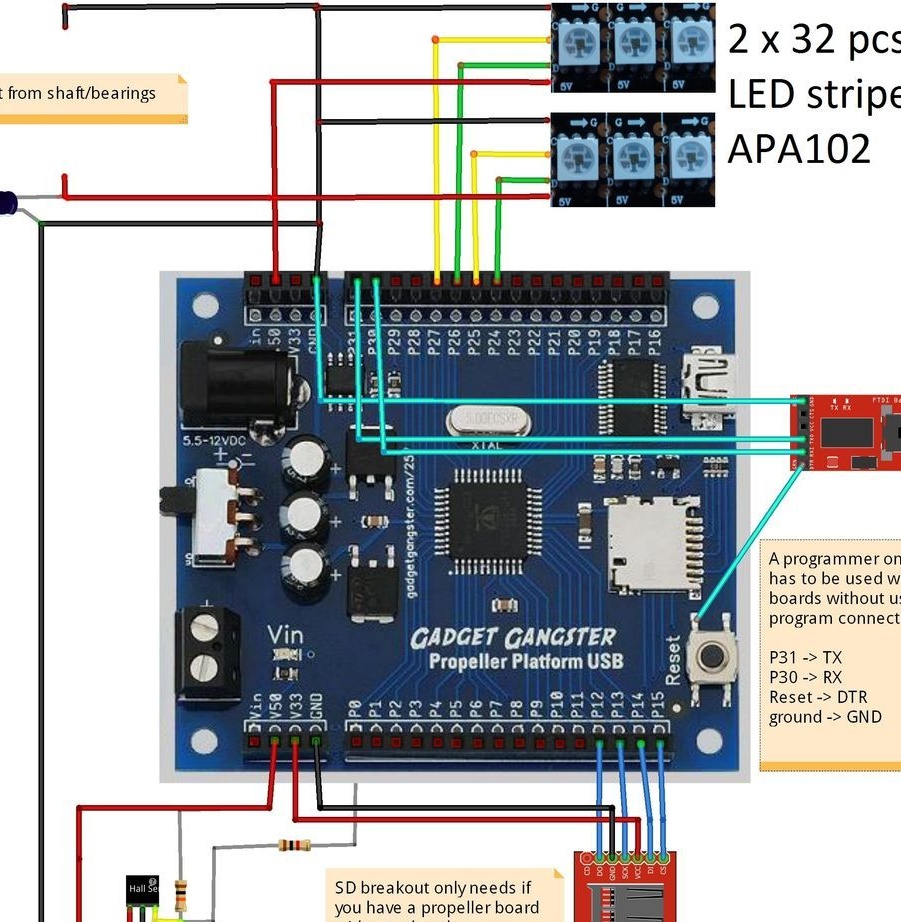
Nu skal du tilslutte den elektriske motor, som vist i diagrammet.
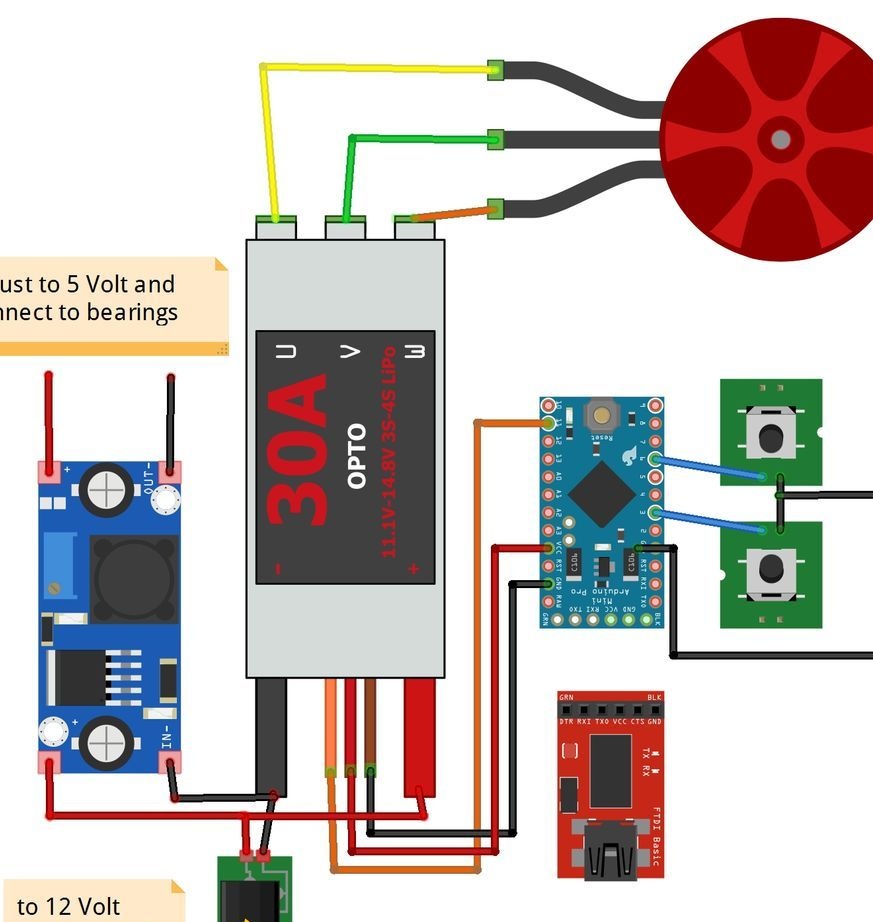
To knapper på diagrammet bruges til at justere hastigheden. Når du tænder for strømmen, modtager ESC en værdi på 500 μs. Tryk på en af knapperne for at tænde for motoren. Skitsen tager værdien “StartPos = 625”. Senere, når du justerer hastigheden, kan denne værdi ændres. Tryk på knappen i to sekunder, og motoren skal stoppe.
Montering af kernestrukturen.
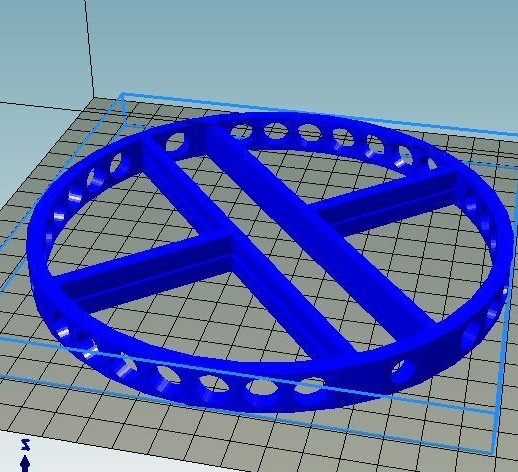

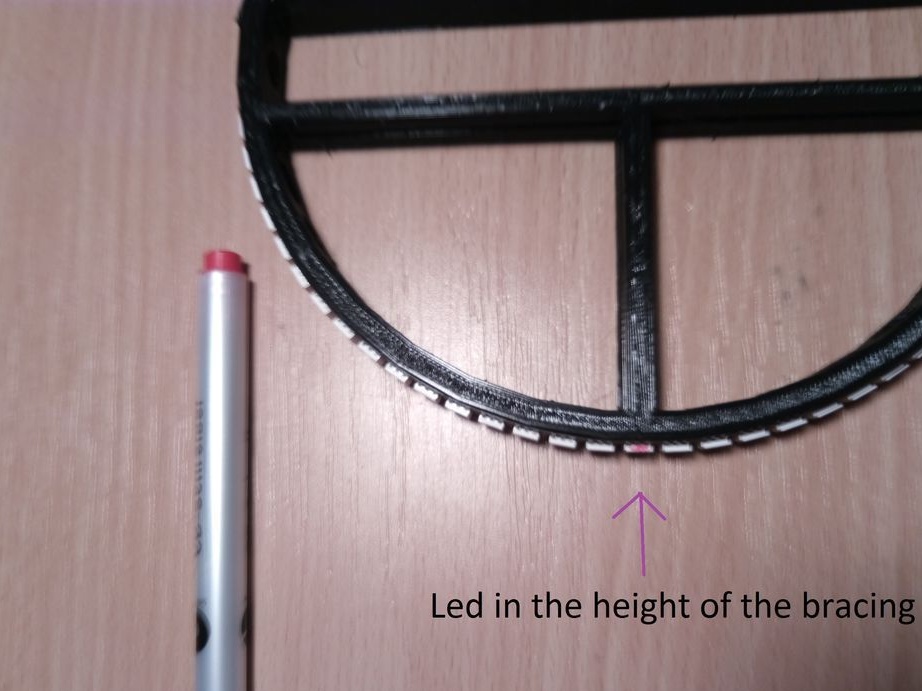
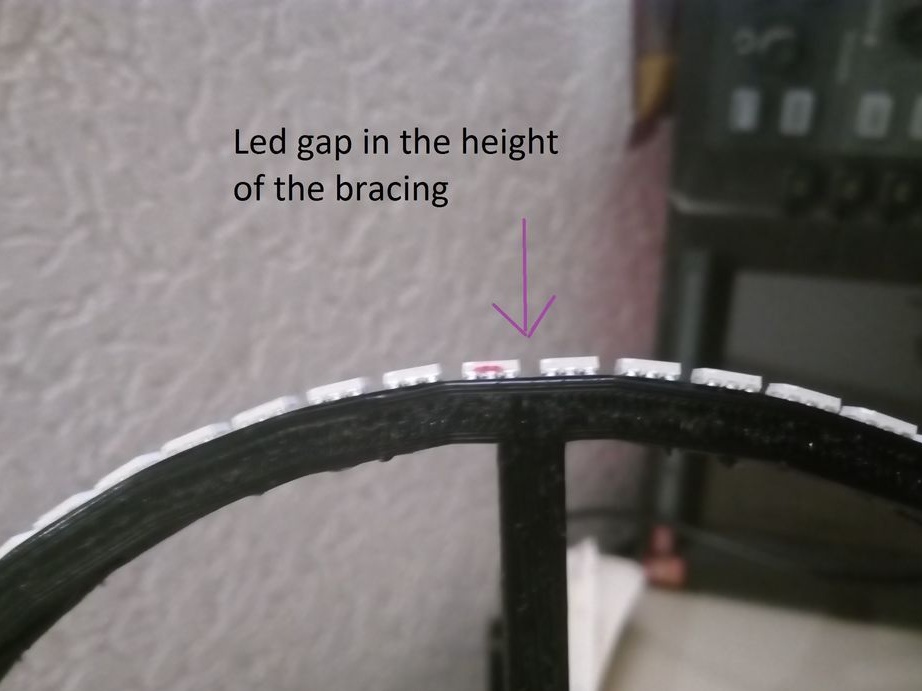


For at gøre dette, udskriv selve ringen fra den vedhæftede fil. Forfatteren lavede mange huller i det for at reducere vægten. Du kan bruge et stykke PVC-rør. To strimler på 32 lysdioder skæres. To strimler af LED'er danner lige og ulige linjer. Arranger båndene, så lysdioderne på den ene strimmel er placeret mellem lysdioderne på den anden, men på bagsiden. Når du har fastgjort båndet, kan du tilslutte LED'erne til kontrolkortet. Og så skal du afbalancere hele monteringen.
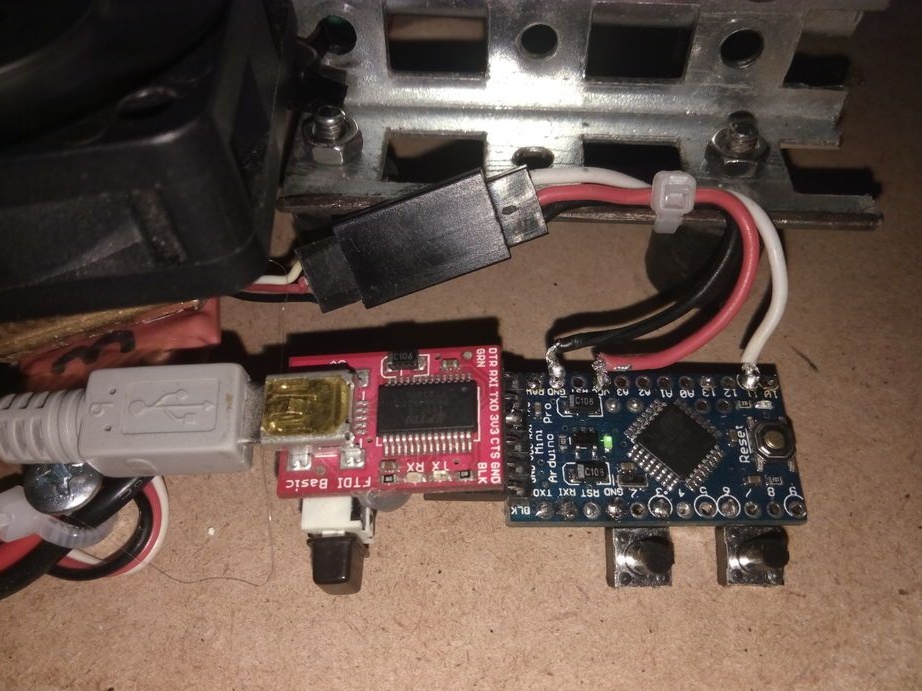
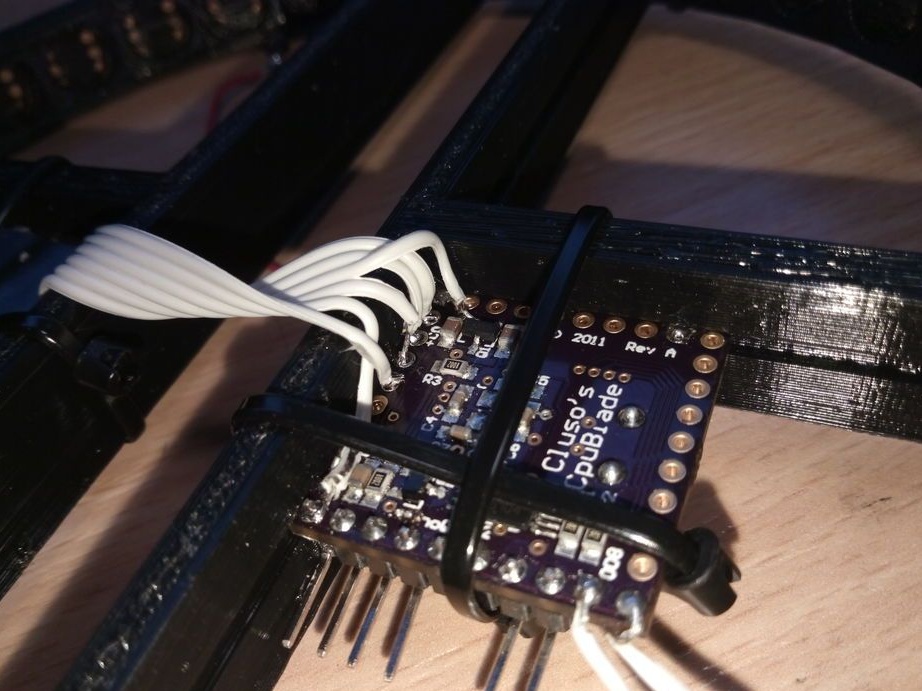
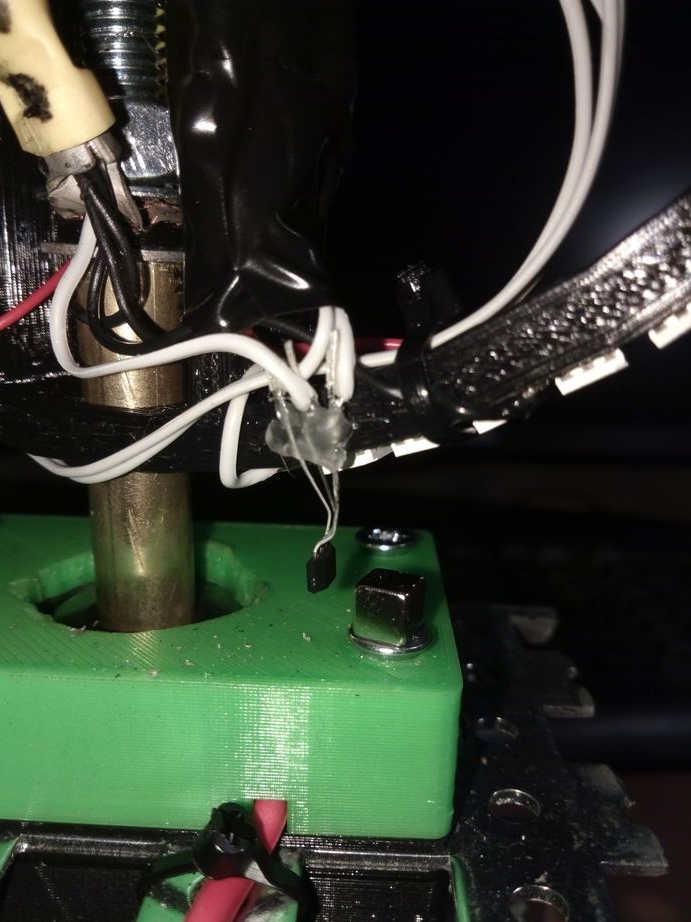
De følgende fotos viser, hvordan du forbinder alle enhedens komponenter sammen. Billedet viser også den installerede hallsensor med en magnet.
For at programmere Parallax Propeller Microcontroller har du brug for
Tilslut IKKE dit udstyr til en USB eller seriel port, før du har installeret softwaren. Flere detaljer om upload af firmware til Parallax kan findes
Forfatteren bruger et ældre og følgelig mindre økonomisk med hensyn til energiforbrug, MCU-kort, fordi han ikke kan finde nye biblioteker på de nye controller-plader.
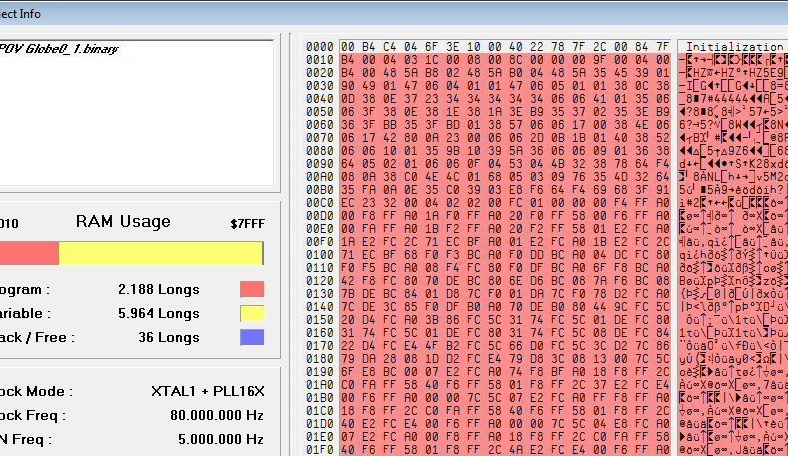
Når du har samlet og tilsluttet alt, skal du programmere controlleren. Forfatteren gør dette med hjælp. Filer med firmware i arkivet.
Nu kan du prøve at starte enheden. Kopier testbilledet fra SD-starten til SD-kortet og indsæt det i åbningen.
• Hvis du drejer ringen med hånden, skal lysdioderne blinke, hver gang hallføleren passerer magneten
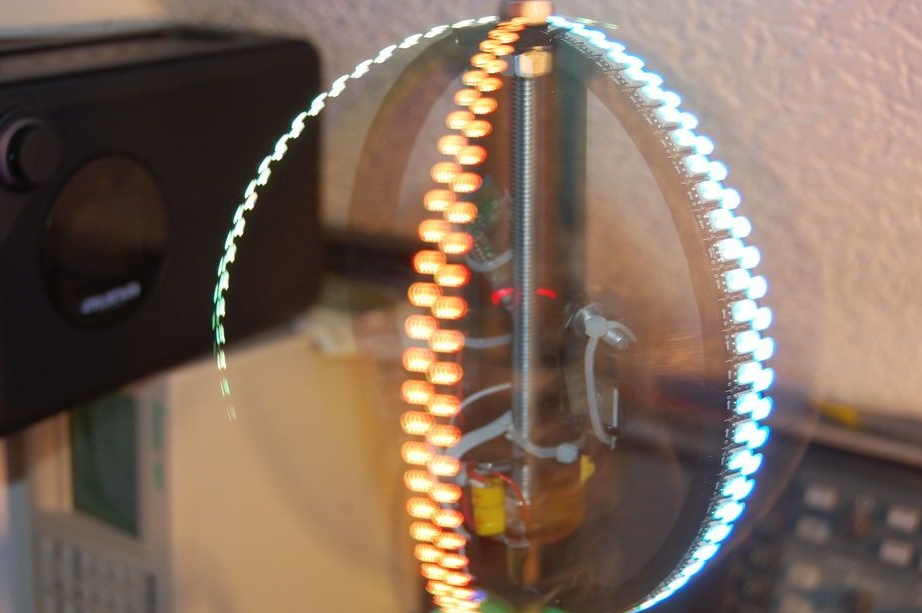
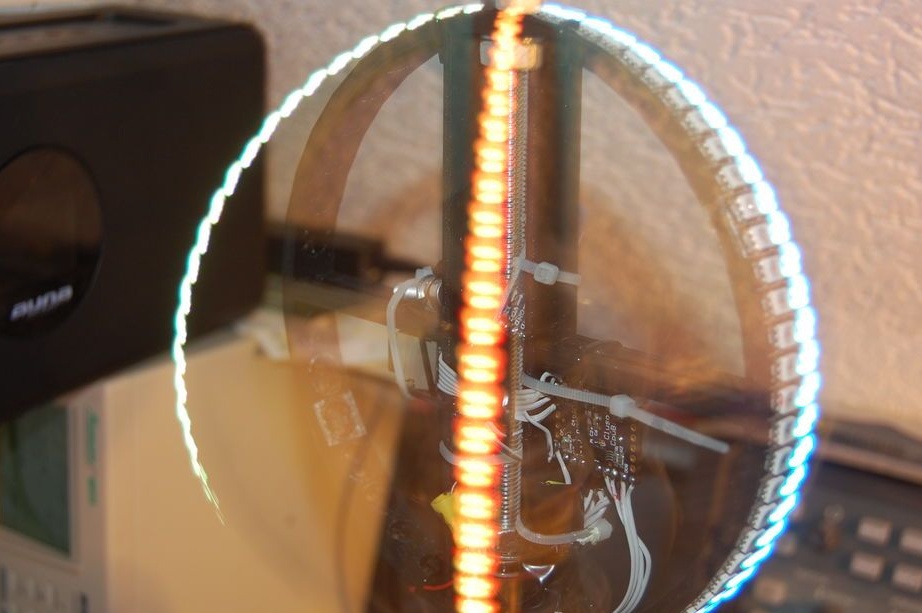
• Tænd for motoren. Forøgelse af hastigheden med knapperne er det nødvendigt at sikre, at LED'erne lyser som vist på 2 fotos
• Tilslut Arduino-terminalen til motorstyringen.
• Husk den viste værdi.
• Stop motoren
• Skriv den tidligere gemte værdi til variablen "startPos"skitse POV_MotorControl
• Programmer Arduino igen.
Næste gang din motor starter straks med den rigtige hastighed. Nu kan du "Fylde" på kortet ethvert billede. For at gøre dette skal du ændre størrelsen på billedet med 120x64 pixels, dreje billedet mod uret med 90 grader og spejle lodret. Reducer billedets lysstyrke, da lysdioderne er meget lyse. For at gøre dette er det bedre at bruge gammakorrektion med en koefficient på 0,45.
Gem billede som BPM 24 bit uden komprimering. Efter alle manipulationer er outputfilen størrelse 23094 byte.



