
Hvis du nogensinde har haft fornøjelsen af at afmontere en gammel printer for at gemme elektronisk komponenter, kan du støde på mange cylindriske mystiske motorer med 4 eller flere ledninger, der stikker ud fra siderne. Hørte du en typisk brummer fra en desktop 3D-printer eller en buggy elektromekanisk symfoni af diske i et CD-drev? I så fald står du over for en trinmotor!
Trinmotorer får den elektromekaniske verden til at rotere (med højere drejningsmoment!), Men i modsætning til en traditionel jævnstrømsmotor kræver det at kontrollere en trinmotor lidt mere end strømmen gennem to ledninger. Denne artikel vil tale om teorien om design og drift af en trinmotor. Så snart vi overvejer det grundlæggende, vil forfatteren af denne vejledning vise, hvordan man bygger enkle kredsløb til styring af steppermotorer, og derefter hvordan man bruger specielle drivermikrokredsløb.
Trin 1: Hvad gør en motor til en trinmotor?
Hvem har muligvis brug for mere end to ledninger og en H-bro? Hvorfor? I modsætning til konventionelle DC-børstemotorer, der er bygget til maksimal omdrejningstal (eller kV til RC), er trinmotorer børsteløse motorer designet til højt drejningsmoment (efterfølgende lavere hastighed) og mere nøjagtig rotationsbevægelse. Mens en typisk jævnstrømsmotor er fantastisk til at dreje propellen i høj hastighed for at opnå maksimal trækkraft, er en trinmotor bedre til at rulle et ark papir synkroniseret med inkjet-mekanismen inde i printeren eller til omhyggeligt at dreje den lineære skinneaksel i en CNC-mølle.
Indvendigt er trinmotorer mere komplekse end en simpel jævnstrømsmotor med flere spoler omkring kernen med permanente magneter, men med denne tilføjede kompleksitet opnås mere kontrol. På grund af det omhyggelige arrangement af spolerne, der er indbygget i statoren, kan trinmotorens rotor rotere med et givet trin, ændre polariteten mellem spolerne og skifte deres polaritet i overensstemmelse med den etablerede tændingsplan. Trinnmotorer er ikke alle lavet det samme, og for deres interne udførelse er unikke (men basale) ordninger påkrævet. Vi vil diskutere de mest almindelige typer trinmotorer i næste trin.
Trin 2: Typer af trinmotorer
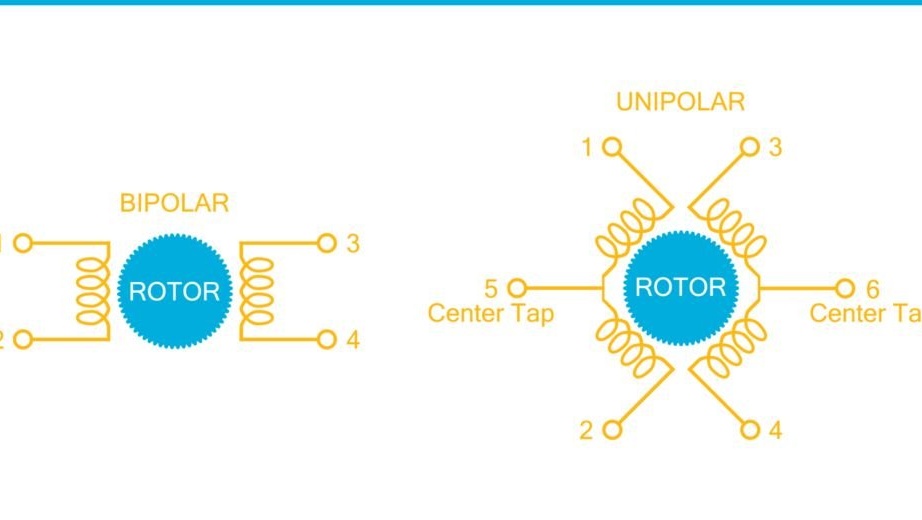
Der er flere forskellige udformninger af steppermotorer. Disse inkluderer unipolar, bipolær, universal og variabel modstand. Vi vil diskutere design og drift af bipolare og unipolare motorer, da dette er den mest almindelige type motor.
Unipolær motor
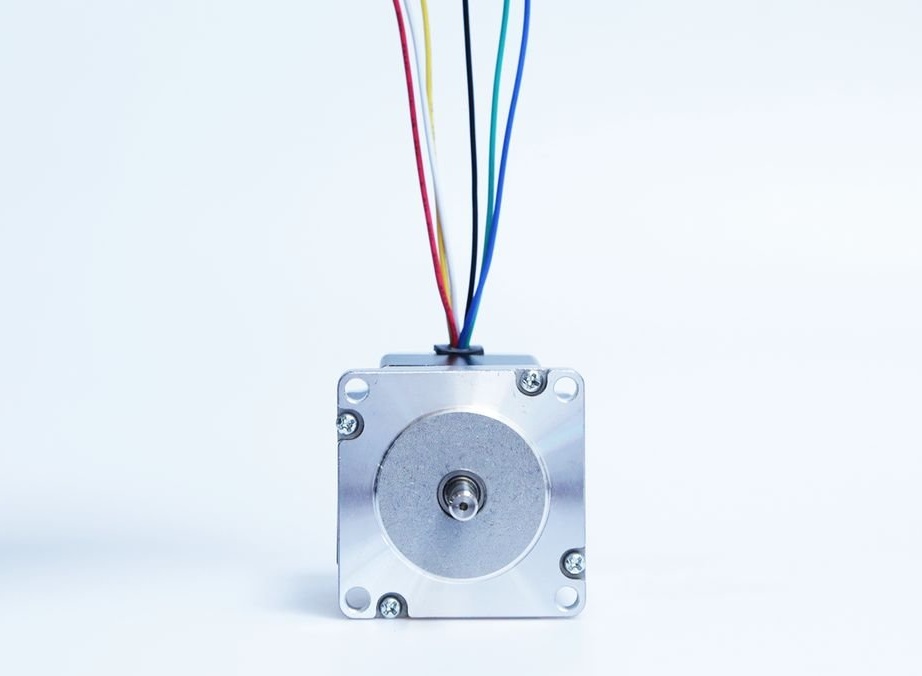
Unipolære motorer har normalt fem, seks eller otte ledninger, der kommer fra basen, og en spole pr. Fase. I tilfælde af en femtrådsmotor er den femte ledning de tilsluttede centrale vandhaner i parspoleparrene. I en seks-trådsmotor har hvert par spoler sit eget centrale hanen. I en ottetrådsmotor er hvert spolepar helt adskilt fra de andre, hvilket gør det muligt at tilslutte det i forskellige konfigurationer. Disse ekstra ledninger giver dig mulighed for at køre unipolære motorer direkte fra en ekstern controller med enkle transistorer til at styre hver spole separat. Et tændingskredsløb, hvori hver spole drives, bestemmer motorakslens rotationsretning. I betragtning af, at kun en spole leveres ad gangen, vil fastholdelsesmomentet for en unipolær motor altid være mindre end det for en bipolær motor af samme størrelse. Ved at omgå de centrale vandhaner i en unipolar motor, kan den nu fungere som en bipolær motor, men dette vil kræve en mere kompleks kontrolplan. I det fjerde trin i denne artikel vil vi køre en unipolar motor, som skulle tydeliggøre nogle af de koncepter, der er præsenteret ovenfor.
Bipolær motor
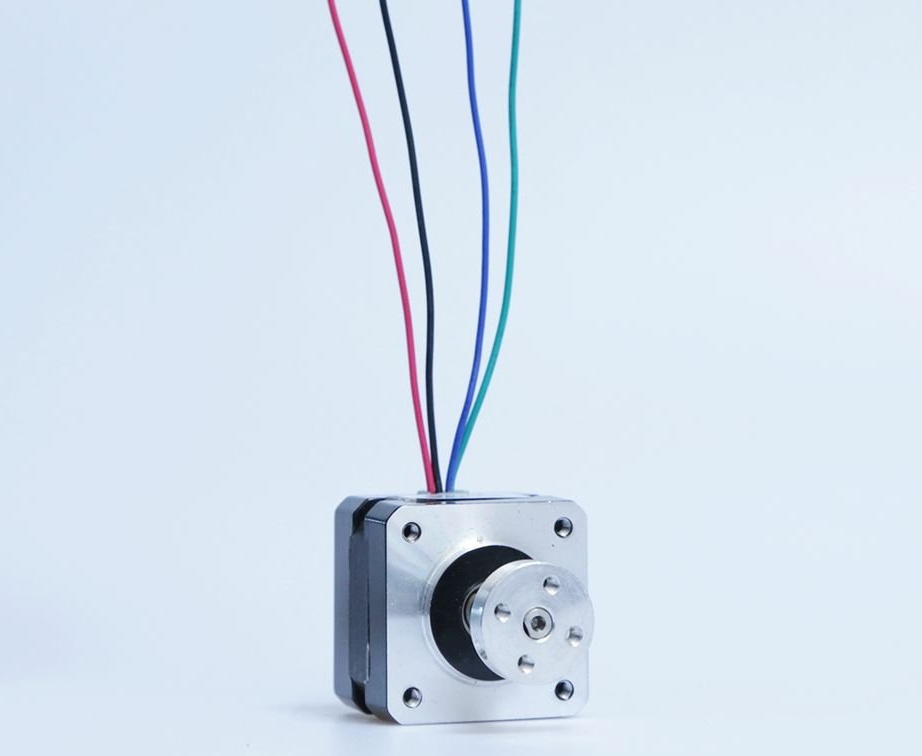
Bipolære motorer har typisk fire ledninger og er mere holdbare end en unipolar motor af sammenlignelig størrelse, men da vi kun har en spole pr. Fase, er vi nødt til at dreje strømmen gennem spolerne for at gå et trin. Vores behov for at ændre strømmen betyder, at vi ikke længere vil være i stand til at styre spolerne direkte med en enkelt transistor, i stedet for et komplet h-brokredsløb. At bygge den rigtige h-bro er kedelig (for ikke at nævne to!), Så vi vil bruge en dedikeret bipolær motordriver (se trin 5).
Trin 3: Forstå trinmotorspecifikationer
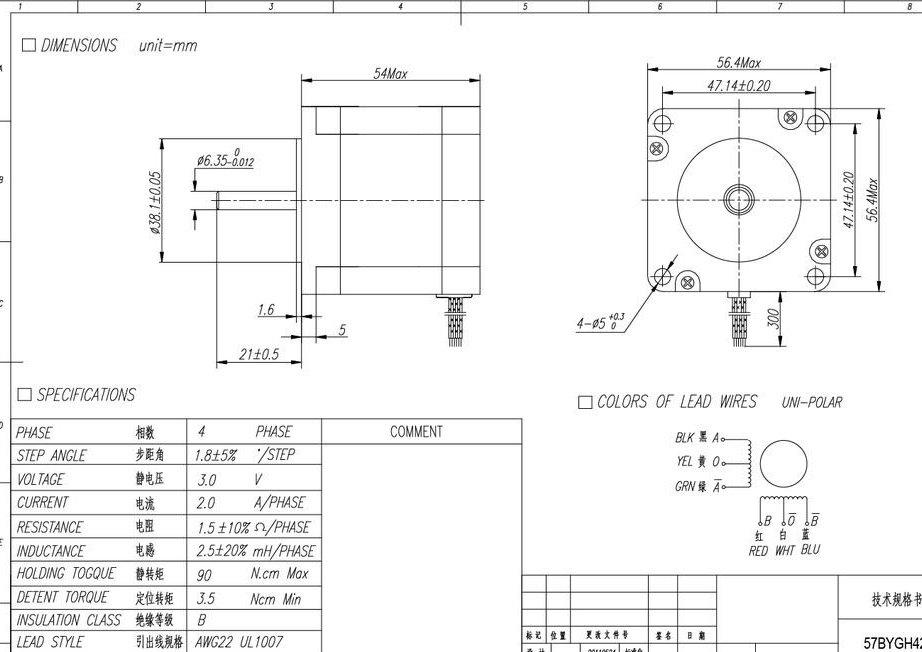
Lad os tale om, hvordan man bestemmer motorspecifikationer. Hvis du har stødt på en firkantet motor med en bestemt tre-delt samling (se figur tre), er det sandsynligvis en NEMA-motor. Den nationale sammenslutning af elektriske producenter har en specifik standard for motorspecifikationer, der bruger en simpel bogstavkode til at bestemme diameteren af motoroverfladen, type montering, længde, fasestrøm, driftstemperatur, fasespænding, trin pr. Omdrejning og ledningsføring.
Læs motorpas
I det næste trin vil denne unipolære motor blive brugt. Over er en datatabel. Og selvom det er kortfattet, giver det os alt, hvad vi har brug for til korrekt drift. Lad os se på, hvad der er på listen:
Fase: Dette er en fire-fase unipolær motor. Den interne motor kan have et hvilket som helst antal ægte spoler, men i dette tilfælde er de grupperet i fire faser, som kan styres uafhængigt.
Vinkelhøjde: Med en omtrentlig opløsning på 1,8 grader pr. Trin får vi 200 trin pr. Omdrejning. Selvom dette er en mekanisk opløsning, kan vi ved hjælp af mikrokrydset øge denne opløsning uden ændringer i motoren (mere om dette i trin 5).
Spænding: Motorens nominelle spænding er 3 volt. Dette er en funktion af motorens nuværende og nominelle modstand (Ohms lov V = IR, derfor 3V = 2A * 1,5Ω)
Strøm: hvor meget strøm har denne motor brug for? To ampere per fase! Dette tal vil være vigtigt, når vi vælger vores effekttransistorer til det grundlæggende styrekredsløb.
Modstand: 1,5 ohm pr. Fase vil begrænse den strøm, vi kan levere til hver fase.
Induktans: 2,5 mH. Motorenes induktive karakter begrænser spolernes opladningshastighed.
Holdemoment: det er hvor meget faktisk kraft vi kan skabe, når der påføres spænding til trinmotoren.
Holdemoment: det er det holdmoment, vi kan forvente af motoren, når den ikke er tændt.
Isoleringsklasse: Klasse B er en del af NEMA-standarden og giver os en vurdering på 130 grader Celsius. Trinmotorer er ikke særlig effektive, og det konstante forbrug af maksimal strøm betyder, at de bliver meget varme under normal drift.
Opviklingsindikatorer: ledningsdiameter 0,644 mm., Antal omdrejninger i diameter 15,5, tværsnit 0,326 mm2
Sporing af spædepar
Selvom spoleviklingernes modstand kan variere fra motor til motor, hvis du har en multimeter, kan du måle modstanden på alle to ledninger, hvis modstanden er <10 ohm, har du sandsynligvis fundet et par! Dette er dybest set en prøvefejlproces, men den skal fungere for de fleste motorer, medmindre du har et del / specifikationsnummer.
Trin 4: Direkte kontrol af trinnmotorer
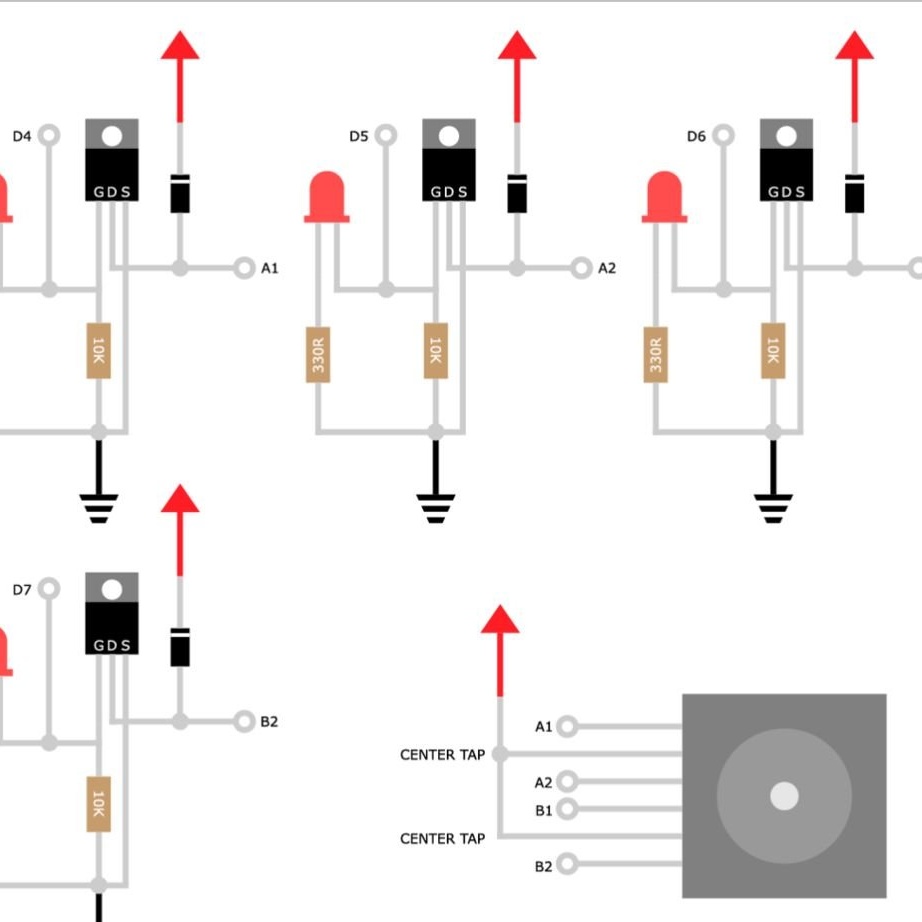
På grund af ledningenes placering i en unipolar motor kan vi sekventielt tænde for spolerne ved kun at bruge enkle MOSFET'er. Figuren ovenfor viser et simpelt kredsløb med en MOS-transistor. Dette arrangement giver dig mulighed for blot at styre det logiske niveau ved hjælp af en ekstern mikrokontroller. I dette tilfælde er den nemmeste måde at bruge et Intel Edison-kort med et stilbaseret patch-kort. Arduinofor at få nem adgang til GPIO (dog vil enhver mikro med fire GPIO'er gøre). IRF510 N-kanals højeffekt MOSFET bruges til dette kredsløb. IRF510, der er i stand til at forbruge op til 5,6 ampere, har tilstrækkelig fri strøm til at imødekomme 2 ampere-motorkrav. LED'er er ikke nødvendige, men de giver dig en god visuel bekræftelse af arbejdsforløbet. Det er vigtigt at bemærke, at IRF510 skal have et logisk niveau på mindst 5 V, så det kan forbruge tilstrækkelig strøm til motoren. Motorkraften i dette kredsløb vil være 3 V.
Arbejdssekvens
Fuld kontrol af en unipolar motor med denne indstilling er meget enkel. For at rotere motoren er vi nødt til at tænde faser i den givne tilstand, så den roterer korrekt. For at dreje motoren med uret kontrollerer vi faser som følger: A1, B1, A2, B2. For at rotere mod uret ændrer vi simpelthen retning af sekvensen til B2, A2, B1, A1. Dette er godt til grundlæggende kontrol, men hvad nu hvis du vil have mere nøjagtighed og mindre arbejde? Lad os tale om at bruge en dedikeret driver til at gøre tingene meget lettere!
Trin 5: Stepper motor driver boards
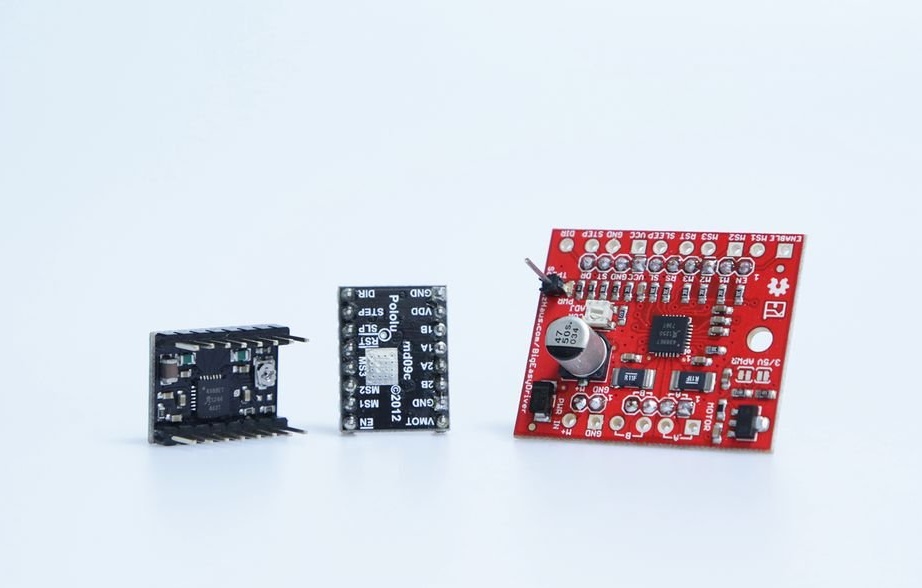
Hvis du vil begynde at styre bipolære motorer (eller unipolære motorer i en bipolær konfiguration), skal du tage et specielt driverkontrolplade. Ovenstående foto viser Big Easy Driver og holderen til A4988 trinmotordriver. Begge disse plader er trykte kredsløbskort til den mikrostepiske topolede Allegro A4988-steppermotordriver, som er langtfra en af de mest almindelige chips til kørsel af små trinmotorer. Ud over at have de nødvendige dobbelt h-broer til styring af en bipolar motor, tilbyder disse tavler mange muligheder for lille, billig emballage.
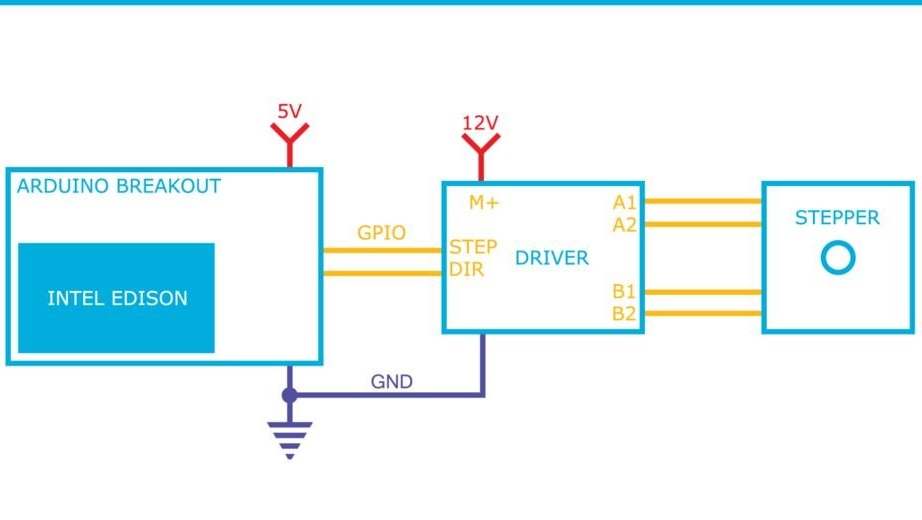
montering
Disse universalplader har en utrolig lav forbindelse. Du kan begynde at styre motoren ved kun at bruge tre forbindelser (kun to GPIO'er) med din hovedkontrol: fælles jord, stigning og retning. Trintrinnet og dets retning forbliver flydende, så du er nødt til at binde dem til referencespændingen med en belastningsmodstand. Den impuls, der sendes til STEP-stiften, bevæger motoren et trin i en opløsning i overensstemmelse med mikrostep-referencestifterne. Det logiske niveau ved DIR-stiften bestemmer, om motoren skal dreje med uret eller mod uret.
Microstep-motor
Afhængigt af hvordan tapperne M1, M2 og M3 er installeret, kan du opnå øget motoropløsning ved mikrostrækning. Mikrosteppen inkluderer sending af en række pulser for at trække motoren mellem den elektromagnetiske opløsning af de fysiske magneter i rotoren, hvilket giver meget præcis kontrol. A4988 kan gå fra det fulde trin til opløsningen af det sekstende trin. Med vores 1,8-graders motor giver dette op til 3200 trin pr. Omdrejning. Tal om de små detaljer!
Koder / biblioteker
Tilslutning af motorer kan være let, men hvad med at kontrollere dem? Tjek disse færdige kodebiblioteker til styring af trinmotor:
Stepper - Den klassiske indbyggede i Arduino IDE giver dig mulighed for at udføre et grundlæggende trin og kontrollere rotationshastigheden.
Accel stepper - Et meget mere komplet bibliotek, der giver dig mulighed for bedre at kontrollere flere motorer og giver den korrekte acceleration og deceleration af motoren.
Intel C ++ MRAA-trin - Et bibliotek på lavere niveau for dem, der ønsker at gå i dybden med styringen af den rå C ++ steppermotor ved hjælp af Intel Edison.
Denne viden skal være nok for dig til at forstå, hvordan du arbejder med steppermotorer i den elektromekaniske verden, men dette er kun begyndelsen.
